") 從經(jīng)典CAN到CAN XL:自動(dòng)駕駛高帶寬數(shù)據(jù)采集的新答案
從經(jīng)典CAN到CAN XL:自動(dòng)駕駛高帶寬數(shù)據(jù)采集的新答案

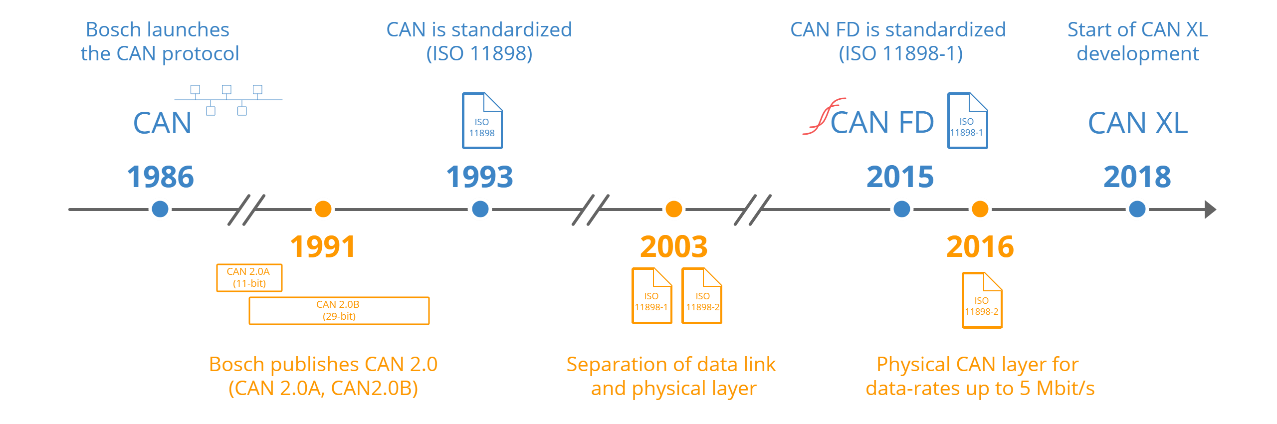
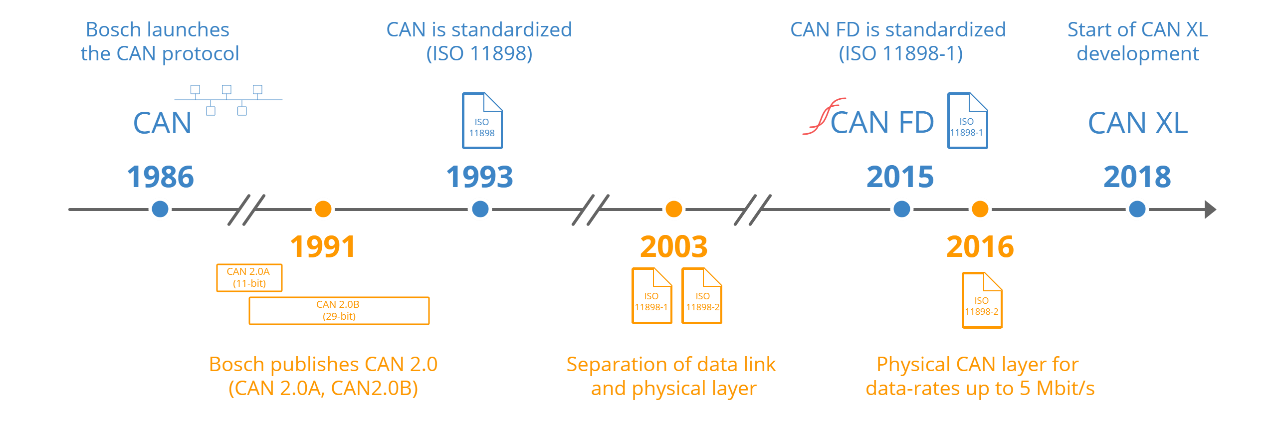
當(dāng)激光雷達(dá)、800 萬像素?cái)z像頭和毫米波雷達(dá)同時(shí)“開口說話”,每幀 3 MB 的點(diǎn)云圖像在 10 ms 內(nèi)就要被域控制器收齊——經(jīng)典 CAN 的 1 Mbps 顯然力不從心,CAN FD 的 64 字節(jié)幀也略顯拮據(jù)。2024 年正式發(fā)布、現(xiàn)已批量供貨的第三代總線 CAN XL,用 20 Mbps 峰值速率與 2048 字節(jié)單幀負(fù)載,為 L3 以上自動(dòng)駕駛數(shù)據(jù)采集提供了第三條路。本文結(jié)合最新路測(cè)數(shù)據(jù)與 OTA 升級(jí)案例,拆解 CAN XL 與 CAN FD、經(jīng)典 CAN 的核心差異,并給出可落地的選型思路。
一、為什么“更大幀”比“更高速”更關(guān)鍵
很多工程師第一反應(yīng)是“把速率提上去就行”,但車載異構(gòu)網(wǎng)絡(luò)里總線長(zhǎng)度、支線拓?fù)渑c EMC 法規(guī)限制了波特率上限。CAN XL 沿用仲裁段最高 1 Mbps、數(shù)據(jù)段最高 20 Mbps 的“雙速率”機(jī)制。相比CAN FD,既保留原有線束,又把單幀數(shù)據(jù)擴(kuò)大 32 倍,相當(dāng)于用“大貨車”替代“小皮卡”——同樣 3 MB 視頻,CAN FD 需拆分 480 幀、間隔 5 ms 重傳,總耗時(shí) 4.5 s;CAN XL 僅 24 幀、1.9 s 完成,抖動(dòng)從 30 μs 降到 17 μs,CPU 負(fù)載下降 40 %。對(duì)于 10 Hz 的實(shí)時(shí)融合算法,這意味著緩存更小、延遲更確定。
二、協(xié)議層三大革新:SDT、VCID 與雙 CRC
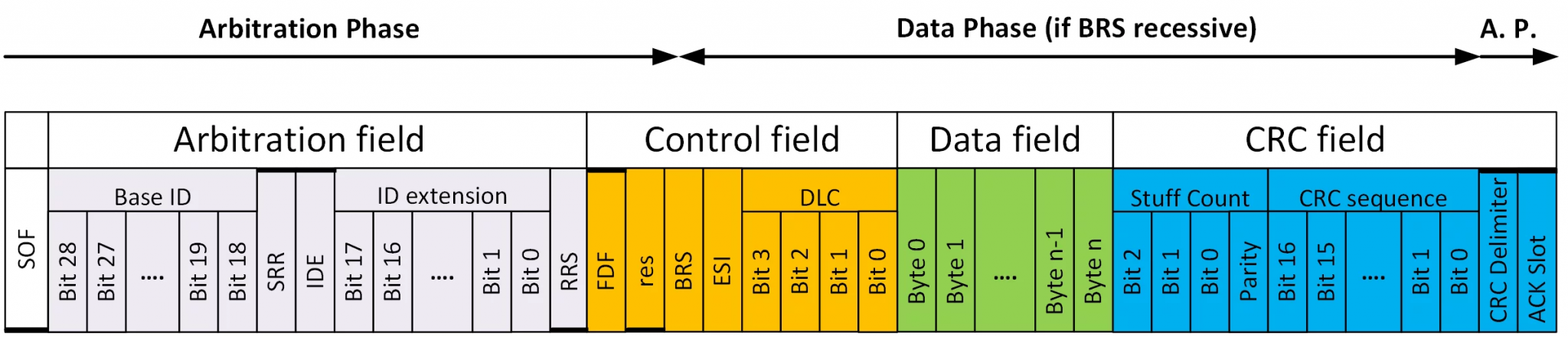
1. 服務(wù)數(shù)據(jù)類型 SDT:8 位 SDT 可封裝以太網(wǎng)幀(SDT=0x04/0x05 對(duì)應(yīng) IEEE 802.3 隧道),支持 UDP、SOME/IP 與 TCP/IP 協(xié)議棧調(diào)用,域控?zé)o需額外交換機(jī)即可實(shí)現(xiàn)跨協(xié)議數(shù)據(jù)轉(zhuǎn)發(fā),雷達(dá)對(duì)象列表進(jìn) ROS2 節(jié)點(diǎn)具備可行性。 2. 虛擬網(wǎng)絡(luò) ID VCID:8 位 VCID 可在單物理總線上劃分最多 256 路邏輯通道,支持按通道做 QoS 與故障域隔離,適配激光雷達(dá)(高優(yōu)先級(jí))、攝像頭(大帶寬)的差異化需求。 3. 13 bit PCRC + 32 bit FCRC 級(jí)聯(lián)校驗(yàn):3 位 PCRC 校驗(yàn)仲裁段與控制段,32 位 FCRC 校驗(yàn)數(shù)據(jù)段,級(jí)聯(lián)設(shè)計(jì)實(shí)現(xiàn)漢明距離 = 6,可檢測(cè) 5 位隨機(jī)錯(cuò)誤,誤幀率較 CAN FD 顯著降低,滿足 ISO 26262 ASIL?B 通信鏈路覆蓋度要求。
三、與 CAN FD、經(jīng)典 CAN 的硬指標(biāo)對(duì)照
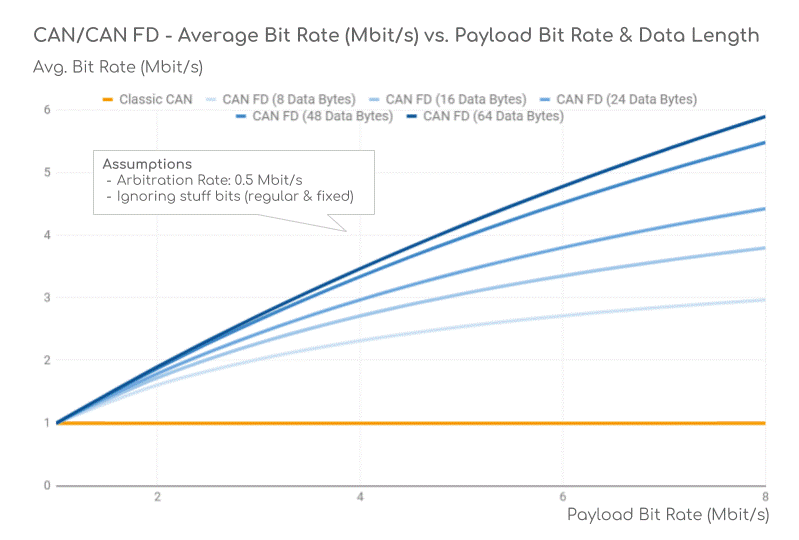
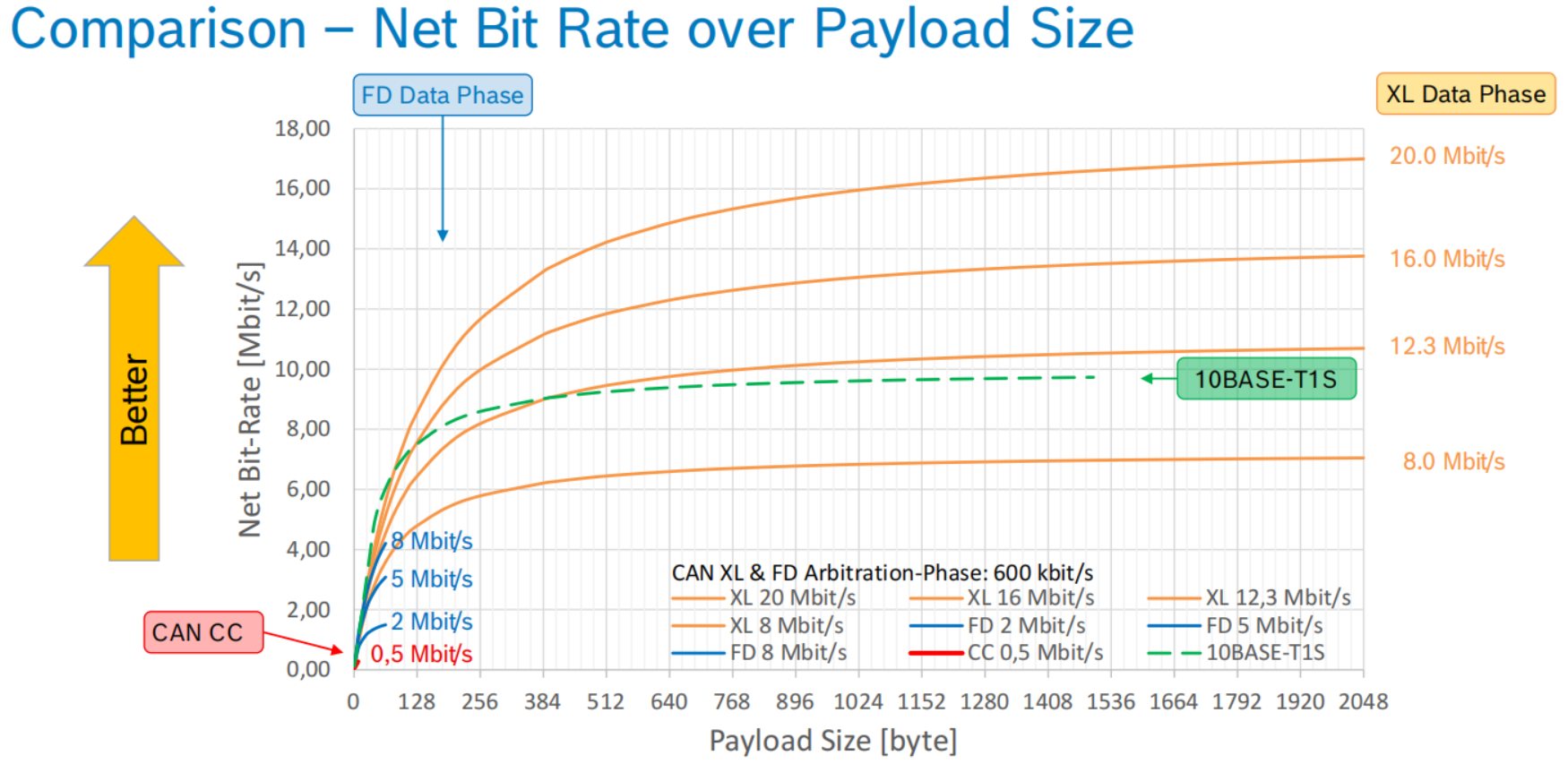
速率:經(jīng)典 CAN 1 Mbps,CAN FD 8 Mbps(SIC),CAN XL 20 Mbps; 單幀數(shù)據(jù):8 Bytes → 64 Bytes → 2048 Bytes; 仲裁 ID:11 bit → 11 bit → 11 bit(向下兼容); 速率切換:無 → 可選 → 強(qiáng)制; 遠(yuǎn)程幀:支持 → 不支持 → 不支持; 拓?fù)浼嫒菪裕喝呖稍谕豢偩€共存,只需統(tǒng)一 SIC 或 SIC-XL 收發(fā)器,老節(jié)點(diǎn)無需硬件改動(dòng)。
四、自動(dòng)駕駛數(shù)據(jù)采集落地案例
某 Tier-1 前向感知域控原方案:4 路 100 萬像素?cái)z像頭 + 1 路 16 線激光雷達(dá),采用 100BASE-T1 以太網(wǎng),需 5 通道 PHY 交換機(jī),線束成本 380 元/車,且交換機(jī)休眠功耗 120 mA。
升級(jí)至 CAN XL 后:攝像頭模組保留以太網(wǎng)接口,但通過板載“以太網(wǎng)-CAN XL 橋接 MCU”把 H.264 碼流轉(zhuǎn)成 CAN XL 幀;激光雷達(dá)原生 CAN XL 輸出。整線束改為 4 根雙絞線(電源+CAN XL),取消交換機(jī),休眠電流降到 15 mA,整車線束減重 0.8 kg,BOM 成本下降 42 %,OTA 升級(jí) 3 MB 固包由 4.5 s 縮短至 1.9 s,用戶無感完成。
五、選型建議:什么時(shí)候上 CAN XL
1. 傳感器單口數(shù)據(jù)量 0.5-3 MB/s,且對(duì)實(shí)時(shí)性 < 10 ms;
2. 平臺(tái)需向下兼容大量 legacy CAN 節(jié)點(diǎn),不想推倒重來;
3. 整車電源管理嚴(yán)苛,要求總線自己?jiǎn)拘选⑿菝撸?/p>
4. 預(yù)算無法承擔(dān) 100BASE-T1 交換機(jī) + PHY 的高成本。
若只是 500 Kbps 車身控制,經(jīng)典 CAN 足夠;若僅 2 Mbps 雷達(dá)目標(biāo)幀,CAN FD 即可;一旦邁進(jìn) 800 萬像素或 3 MB 點(diǎn)云,CAN XL 成為目前唯一能兼顧帶寬、實(shí)時(shí)與成本的量產(chǎn)方案。
對(duì)于希望體驗(yàn)或部署CAN XL的用戶,目前市場(chǎng)上已有成熟的開發(fā)套件和工具,能夠幫助工程師快速上手。
虹科PCAN-XL套件
適用場(chǎng)景:CAN XL技術(shù)驗(yàn)證、車載通信開發(fā)、工業(yè)自動(dòng)化測(cè)試

核心組件:
PCAN-USB XL接口:支持CAN XL、CAN FD和經(jīng)典CAN,兼容USB 2.0/3.0,提供500V電氣隔離,確保設(shè)備安全。
PCAN-Explorer 7(搶先體驗(yàn)版):支持CAN XL協(xié)議解析、Python腳本自動(dòng)化、J1939 FD協(xié)議,并提供高精度時(shí)間戳(1μs)和靈活的報(bào)文過濾。
雙節(jié)點(diǎn)支持:套件可選配1個(gè)或2個(gè)PCAN-USB XL接口,即使沒有CAN XL對(duì)接設(shè)備,也能進(jìn)行基礎(chǔ)通信測(cè)試。
優(yōu)勢(shì):
? 即插即用,適合快速驗(yàn)證CAN XL通信
? 支持高達(dá)20Mbit/s的數(shù)據(jù)傳輸(FAST-Mode)
? 兼容CAN FD和經(jīng)典CAN,便于過渡和兼容性測(cè)試
六、小結(jié)
CAN XL 不是“更快的 CAN FD”,而是把“以太網(wǎng)級(jí)大幀”搬進(jìn)熟悉的兩線 CAN 生態(tài)。20 Mbps 峰值、2048 字節(jié)單幀、雙 CRC 校驗(yàn)、原生 TCP/IP 映射,讓它在 L3 以上自動(dòng)駕駛數(shù)據(jù)采集場(chǎng)景首次實(shí)現(xiàn)“高帶寬-低延遲-低成本”的不可能三角。隨著 2025 年 ISO 11898-4 正式落地,主流 MCU 已集成 CAN XL 控制器,Tier-1 的評(píng)估板也已批量供貨,下一步要做的,就是把這條“更寬的 CAN”規(guī)劃進(jìn)下一代 E/E 架構(gòu)。
審核編輯 黃宇
-
CAN
+關(guān)注
關(guān)注
59文章
3077瀏覽量
473084 -
數(shù)據(jù)采集
+關(guān)注
關(guān)注
42文章
8158瀏覽量
121116 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
794文章
14930瀏覽量
180663
發(fā)布評(píng)論請(qǐng)先 登錄
為什么很多主機(jī)廠都在開始討論和預(yù)演CAN XL?

自動(dòng)駕駛端到端為什么會(huì)出現(xiàn)黑盒現(xiàn)象?

高校自動(dòng)駕駛研究新基建:“實(shí)測(cè) - 仿真” 一體化數(shù)據(jù)采集與驗(yàn)證平臺(tái)

CAN XL 技術(shù)解析:從協(xié)議演進(jìn)到自動(dòng)駕駛數(shù)據(jù)采集應(yīng)用實(shí)踐
自動(dòng)駕駛BEV Camera數(shù)據(jù)采集系統(tǒng):高精度時(shí)間同步解決方案

L4級(jí)自動(dòng)駕駛數(shù)據(jù)采集系統(tǒng)首選
自動(dòng)駕駛數(shù)據(jù)采集時(shí)間同步指南:方法、挑戰(zhàn)、場(chǎng)景與康謀解決方案
直播回顧 | CAN XL新標(biāo)準(zhǔn)落地難?從協(xié)議解析到實(shí)踐應(yīng)用,虹科技術(shù)專家?guī)嫣剿?b class='flag-5'>CAN XL的技術(shù)突破與落地

端到端自動(dòng)駕駛相較傳統(tǒng)自動(dòng)駕駛到底有何提升?

CAN XL通信技術(shù)在車載毫米波雷達(dá)中的應(yīng)用(2)

一文讀懂CAN XL協(xié)議





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論