 自動駕駛仿真測試場景生成方法:從技術突破到工程落地的全維度解析
自動駕駛仿真測試場景生成方法:從技術突破到工程落地的全維度解析

在自動駕駛技術邁向 L4 及更高階別的進程中,仿真測試已成為算法迭代、功能驗證與安全合規的核心支撐。其中,測試場景的真實性、多樣性與可擴展性直接決定了仿真測試的有效性 —— 傳統場景生成方式依賴人工建模與有限真實數據采集,不僅耗時耗力,更難以覆蓋極端工況與長尾場景。隨著 3D 高斯潑濺(3DGS)、神經輻射場(NeRF)等技術的崛起,自動駕駛仿真場景生成正迎來從 "手動構建" 到 "智能重建" 的革命性轉變。本文將系統解析當前主流場景生成方法,深度拆解技術演進邏輯,并介紹康謀 aiSim 3DGS 方案如何實現場景生成的全流程閉環,為自動駕駛研發提供高效、高保真的解決方案。
一、自動駕駛仿真場景生成的核心挑戰與技術演進
(一)傳統場景生成方法的痛點
早期自動駕駛仿真場景生成主要依賴兩種路徑:一是工程師手動搭建虛擬場景,通過物理引擎配置道路、交通參與者與環境參數;二是基于真實路測數據進行簡單復刻,形成開環測試用例。這兩種方式均存在難以逾越的瓶頸:
- 效率極低 :復雜場景手動建模需數月時間,且無法快速適配不同測試需求;
- 泛化能力弱 :真實路測數據受限于采集范圍,難以覆蓋暴雨、暴雪、極端視角等特殊工況;
- 領域差距顯著 :即便采用光追渲染,虛擬場景與真實環境在視覺細節、物理特性上仍存在 "domain gap",導致測試結果可信度不足;
- 可編輯性差 :修改傳感器配置、交通流密度等參數需重新建模或采集數據,無法支持閉環迭代測試。
(二)技術演進:從物理建模到神經重建的跨越
隨著人工智能與計算機視覺技術的發展,場景生成方法逐步轉向數據驅動的神經重建模式,核心技術路徑經歷了三個階段:
- 傳統物理渲染階段 :依賴 UE、Unity 等引擎構建虛擬場景,優勢是支持靈活編輯,但真實性依賴人工調校,難以還原真實道路的復雜細節;
- NeRF 神經輻射場階段 :通過神經網絡學習空間坐標與圖像色彩、密度的映射關系,實現高保真場景重建,但計算成本極高,渲染速度慢且不支持實時編輯;
- 3DGS 高斯潑濺階段 :將場景離散為攜帶位置、協方差矩陣、不透明度等信息的 3D 高斯點,兼具 NeRF 的高保真特性與實時渲染能力,成為當前最具工程價值的場景生成技術。
二、主流自動駕駛仿真場景生成方法解析
(一)三類核心生成方法對比
當前行業主流的場景生成方法可分為真實采集數據復刻、神經重建生成、純仿真合成三類,其技術特性與適用場景各有側重:
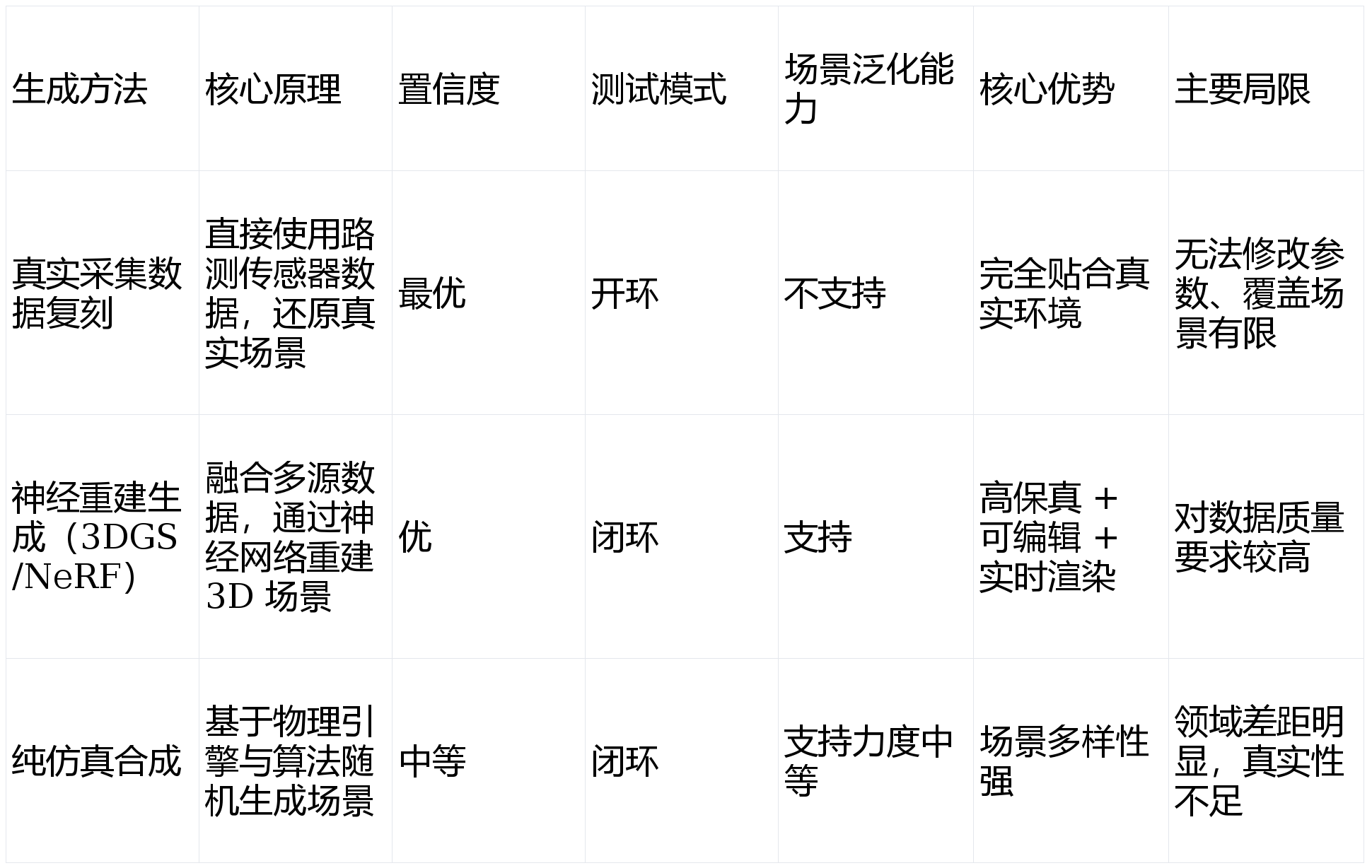
其中,神經重建生成方法憑借 "真實還原 + 靈活編輯" 的雙重優勢,成為平衡測試可信度與效率的最優解,而 3DGS 技術因其更優的實時性能與工程適配性,逐漸成為該路徑的主流選擇。
(二)3DGS 神經重建:場景生成的最優技術路徑
3DGS 場景生成的核心流程可分為四大環節,實現從原始數據到可用仿真場景的全鏈路轉化:
- 多源數據標準化輸入 :采集相機圖像、激光雷達點云、自車運動數據等多模態信息,通過 aiData 等工具鏈完成格式統一、時間戳同步與坐標系對齊,解決數據異構問題;
- 場景預處理優化 :包括 3D 自動標注(識別車輛、行人等目標并生成 3D 邊界框)、2D 語義分割(優化場景細節)、相機位姿校準(確保空間坐標準確性),為重建提供 "干凈數據";
- 神經重建模型訓練 :融合 NeRF 的幾何泛化能力與 3DGS 的實時特性,通過 T-S 結構將深度、法線等監督信號遷移至高斯參數優化,結合 LiDAR 深度約束提升建模精度;
- 場景驗證與編輯 :通過 DEVIANT 算法(校驗幾何精度)與 Mask2Former 算法(驗證像素一致性)雙重驗證,確保場景與真實環境一致;支持添加交通流、模擬極端天氣、配置傳感器等靈活編輯。
這一流程既保留了真實場景的高可信度,又具備純仿真合成的靈活擴展性,完美解決了傳統方法的核心痛點。
三、康謀 aiSim 3DGS 方案:重新定義場景生成的工程標準
康謀神經網絡渲染自動駕駛仿真方案,將 3DGS 神經重建技術從實驗室推向工程落地,構建起 "數據采集 - 場景重建 - 仿真測試" 的全流程閉環。
(一)核心技術突破:四大創新打造高保真場景生成能力
- 全棧自動化工具鏈 :從數據采集到場景輸出實現端到端自動化,僅需 1 天即可完成傳統方法 3-6 個月的數字孿生構建工作,大幅降低時間成本;
- 混合式渲染引擎 :原生集成生產級仿真軟件 aiSim,融合神經重建與物理渲染優勢,既還原真實場景細節,又支持暴雨、暴風雪、地面積水等多樣化環境模擬;
- 多模態傳感器兼容 :全面覆蓋攝像頭、激光雷達(LiDAR)、毫米波雷達等主流傳感器,支持自定義傳感器配置,滿足復雜感知系統測試需求;
- 極端視角泛化能力 :支持偏離原始采集軌跡最遠達 3 米的新視角生成,通過 Difix 技術增強圖像質量,解決極端工況下的場景覆蓋難題。
(二)場景生成的全流程閉環優勢
康謀 aiSim 3DGS 方案通過五大環節實現場景生成與仿真測試的無縫銜接:
- 數據輸入兼容 :支持 Waymo 開源數據集、第三方采集數據等多種輸入形式,通過標準化工具鏈解決多源數據異構問題;
- 高精度重建 :基于 3DGS 技術實現靜態場景的高保真重建,剔除動態物體干擾,同時保留道路、建筑等細節的精準還原;
- 動態場景增強 :內置 2000+3D 資產庫,可靈活添加車輛、行人、交通信號燈等動態元素,支持基于 OpenSCENARIO 1.2 構建標準場景;
- 多維度驗證 :通過 Waymo 數據集量化驗證,在 3D 目標檢測任務中 AP 3D 值表現優異,像素分類一致性達 90% 以上,有效消除領域差距;
- 閉環仿真測試 :支持 SiL、HiL、DiL 等多種測試模式,即便在偏離原始軌跡的全新路徑上,仍能實現自動駕駛系統的穩定閉環測試。
(三)案例實證:從技術優勢到業務成效
在實際應用中,康謀 aiSim 3DGS 方案已為歐洲乘用車 OEM、日本 EV OEM 等客戶創造顯著價值:
- 數字孿生構建時間從 3-6 個月縮短至 1 天,研發效率提升 95% 以上;
- 人工標注成本降低至原預算的 5% 以下,大幅減少人力投入;
- 支持傳感器配置快速迭代,無需重復采集數據,測試成本降低 40%;
- 覆蓋泊車、高速公路、城市道路、越野等多種 ODDs 場景,滿足全場景測試需求。
四、結語
自動駕駛仿真測試場景的生成質量,直接決定了自動駕駛系統的研發效率與安全水平。從傳統手動建模到 3DGS 神經重建,場景生成技術的演進本質上是 "真實性" 與 "靈活性" 的平衡過程。康謀 aiSim 3DGS 方案通過技術創新實現了這一平衡,既保留了真實場景的高可信度,又具備靈活編輯與極端工況覆蓋能力,為自動駕駛研發提供了高效、可靠的仿真測試基礎。
審核編輯 黃宇
-
3D
+關注
關注
9文章
3017瀏覽量
115413 -
仿真測試
+關注
關注
0文章
115瀏覽量
11802 -
自動駕駛
+關注
關注
794文章
14942瀏覽量
180936
發布評論請先 登錄
半導體嵌入式單元測試的核心技術、工具選型與落地全流程
Sim?Pro 實現仿真測試場景全量構成

aiSim領銜!國內外自動駕駛仿真軟件大全:熱門推薦與選擇指南

端到端智駕仿真軟件推薦:全球首款ASIL-D認證平臺助您突破自動駕駛測試瓶頸
高保真自動駕駛仿真軟件對比:全球首款ASIL-D認證平臺aiSim的技術突破
講講如何閉環自動駕駛仿真場景,從重建到可用?

生成式 AI 重塑自動駕駛仿真:4D 場景生成技術的突破與實踐

康謀分享 | 基于多傳感器數據的自動駕駛仿真確定性驗證

自動駕駛技術測試有哪些?

自動駕駛技術落地前為什么要先測試?
搭建完整的ADAS測試鏈路,推動自動駕駛技術的安全發展



 工商網監
工商網監
評論