 高校自動駕駛研究新基建:“實測 - 仿真” 一體化數據采集與驗證平臺
高校自動駕駛研究新基建:“實測 - 仿真” 一體化數據采集與驗證平臺

本項目客戶為國內一所以智能駕駛為核心研究方向的高校科研團隊。團隊長期聚焦于自動駕駛感知、定位與系統級驗證研究,同時承擔研究生教學與科研平臺建設任務。
在科研與教學并行推進的背景下,客戶希望構建一套可持續擴展、可復用的自動駕駛數據采集與數字孿生測試平臺,支撐從真實道路采集到高保真仿真驗證的完整研究鏈路。
在此背景下,康謀為其提供了數采車系統、無人駕駛車輛集成方案以及數字孿生仿真服務,幫助客戶打通“真實世界—虛擬世界”的關鍵通路。
01 客戶痛點
在項目啟動初期,客戶面臨的并非單一設備或軟件問題,而是一組系統性技術挑戰:
多源傳感器高帶寬、低延時的實時監測壓力
客戶數采車配置復雜,傳感器規模遠超常規教學平臺,包括:
相機:2 × 8MP + 6 × 2MP
LiDAR:2 × 128線
Radar:5套
定位與狀態:GNSS RTK / IMU / USS
在實際道路采集中,如何實時監測原始數據質量、避免事后發現數據不可用,是首要難題。同時,多路視頻與點云數據對服務器帶寬和處理能力提出了極高要求。
實車與仿真環境的運動狀態同步難題
客戶的核心科研目標之一,是實現數據采集車輛與仿真環境中主車的動態同步,構建“動起來的數字孿生”。
這意味著:
需要高精度時間同步,確保多傳感器數據在同一時間基準下對齊;
需要在仿真端完成多坐標系轉換與姿態對齊;
同時還要將控制與狀態延遲控制在可接受范圍內,否則仿真結果將失去科研價值。
02 解決方案概覽
針對上述挑戰,康謀并未簡單疊加硬件或軟件模塊,而是從系統架構層面,構建了一套以數據一致性與實時性為核心的聯合解決方案。

康謀方案支持基于真實車輛動力學的控制映射,無需高校團隊額外構建復雜的動力學模型,即可在仿真中獲得高度一致的車輛行為表現,大幅降低系統建模門檻。
閉環流程:實車采樣 → 自動標定 → 配置加載 → 實時運行
離線回放:支持 rosbag 回放復驗,無需反復外場測試
多層容錯:從網絡、協議到算法的全棧防護
配置驅動架構:無需改代碼即可適配新場景,天然適合高校長期演進的科研環境
方案核心亮點如下:

高帶寬數據采集與低延時實時監測
- 構建高帶寬服務器架構,相機數據采用硬件編解碼處理;
- 視頻流通過 SRT 協議進行實時回傳與監測,在保證畫質的同時顯著降低丟包風險;
- 對 LiDAR 數據采用多線程降采樣監測機制,在不影響關鍵特征的前提下,進一步降低服務器帶寬與計算壓力。
結果:在復雜傳感器配置下,服務器整體帶寬壓力降低約 20%。
以 GNSS RTK / IMU 為基座的高精度同步鏈路
- 基于 GNSS RTK / IMU 原始數據構建統一的工具鏈基座;
- 通過 UDP + 串行數據處理的方式優化數據傳輸路徑,顯著減少控制與狀態傳輸延遲;
- 在仿真端設計關鍵橋接核心引擎,實現:
多層次坐標系統的高精度轉換體系
智能自適應對齊機制
高魯棒性的狀態數據平滑
嚴格RTK狀態門控和診斷
結果:實車與仿真主車的同步延遲穩定控制在 20 ms 以內,滿足高保真科研仿真需求。
智能標定工具
為降低高校團隊的系統使用門檻,康謀同步交付了智能標定工具,將復雜的標定流程標準化、自動化。
提供一鍵式自動標定流程
基于PCA的運動方向智能估計
投影和高度數據自動修正
質量可量化的標定評估體系
03 方案成效
通過本項目的實施,該平臺成功構建了一個面向高校的標準化智能駕駛實訓與科研驗證基礎設施。,客戶在科研與教學層面獲得了顯著收益:
科研效率提升
- 獲取高精度時間同步的多傳感器原始數據
- 支持低延時在線監測,減少無效采集與重復外場測試
測試成本與風險顯著降低
- 危險與長尾工況可通過數字孿生方式反復驗證
- 顯著減少高風險實車測試帶來的安全與合規壓力
教學資源標準化與復用
- “實測—仿真”雙向聯動平臺可直接用于課程教學
- 支撐多屆學生、多個課題組共享同一驗證體系
-
數據采集
+關注
關注
42文章
8275瀏覽量
121196 -
仿真
+關注
關注
55文章
4529瀏覽量
138612 -
自動駕駛
+關注
關注
794文章
14962瀏覽量
181152
發布評論請先 登錄
什么是安消一體化物聯網系統云平臺--安防消防一體化物聯網系統云平臺簡稱安消一體化云平臺
光儲充一體化電站微電網系統建設的應用方案
加速L4級自動駕駛商業化:aiData全自動化數據處理解決方案!

自動駕駛BEV Camera數據采集系統:高精度時間同步解決方案

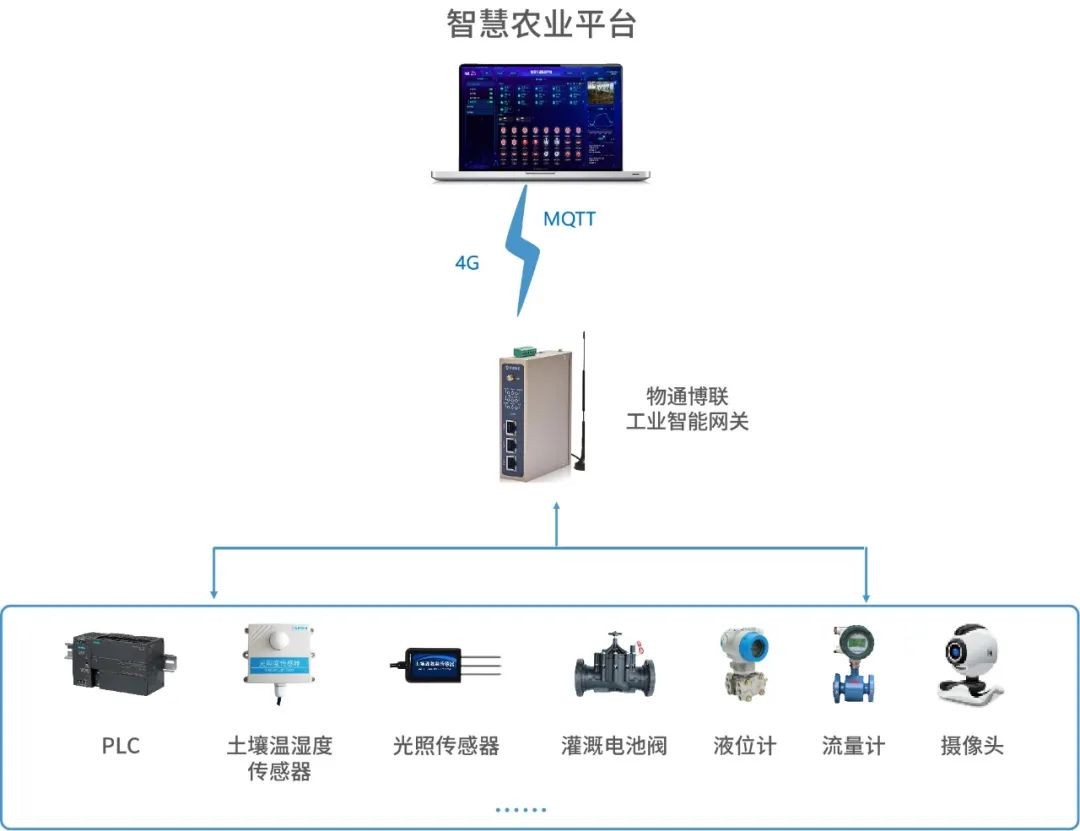
工業智能網關如何遠程監控控制灌溉一體化設備PLC
自動駕駛數據采集時間同步指南:方法、挑戰、場景與康謀解決方案
L4級自動駕駛數據采集系統首選——康謀科技DATALynx ATX4 & BRICK系列全解析
多參數一體化水文自動監測站的設計與應用優勢解析
康謀分享 | 基于多傳感器數據的自動駕駛仿真確定性驗證

搭建完整的ADAS測試鏈路,推動自動駕駛技術的安全發展
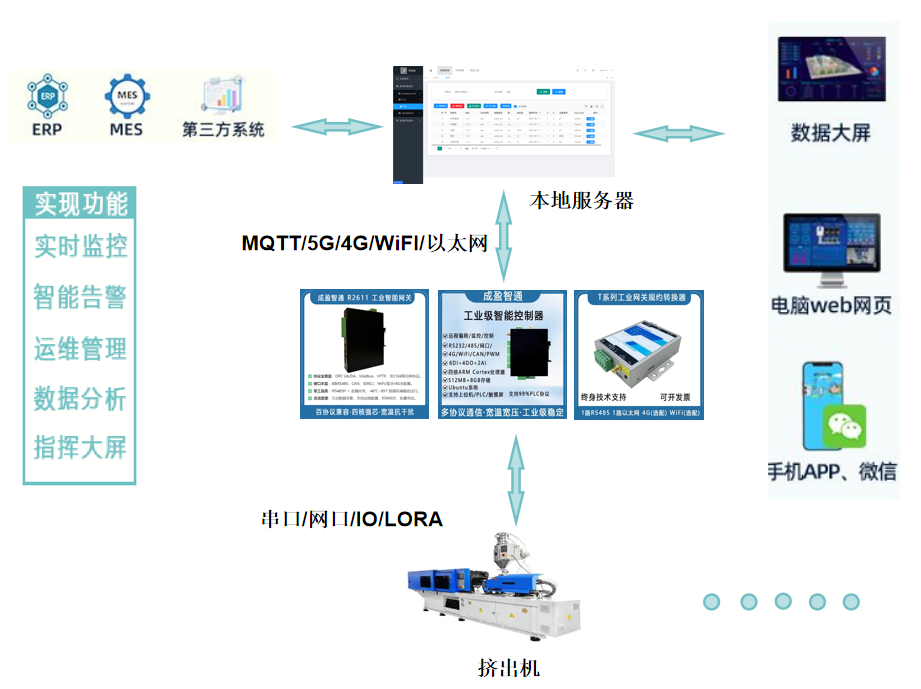
EGBox:一體化工業級實時仿真旗艦平臺,全功能覆蓋




 工商網監
工商網監
評論