LiDAR測距應用越來越普及,例如行人檢測、車輛檢測、障礙物探測等自動駕駛應用,以及道閘防砸、高度計等。本項目以北醒TFMini-S Micro LiDAR傳感器為例,演示LiDAR傳感器與Arduino的連接,以及測距結果及顯示。本項目BOM如下:
2022-07-19 10:34:47 4383
4383 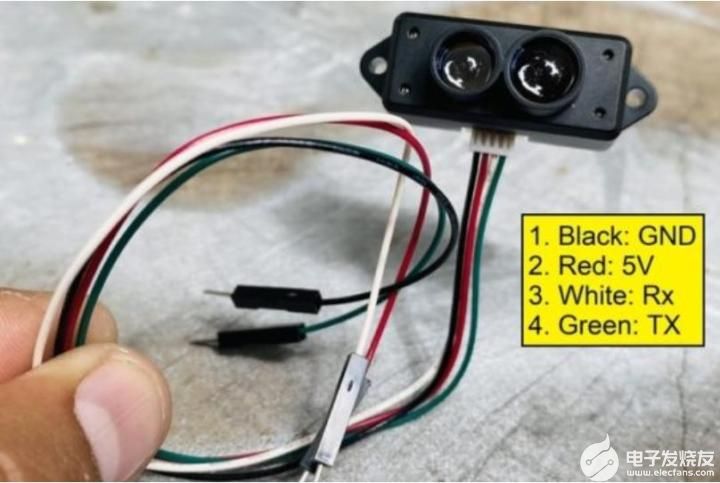
麥姆斯咨詢:由于全固態LiDAR內部沒有任何宏觀或微觀上的運動部件,耐久性和可靠性的優勢不言而喻,且順應了自動駕駛對LiDAR固態化、小型化和低成本化的趨勢。
2017-12-29 10:07:0113910 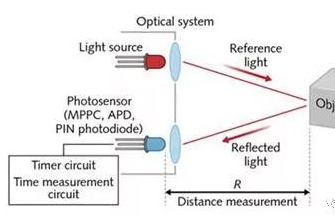
如何檢測過流信號,并在電路中實現邏輯控制。
2019-05-24 07:29:006212 的3D模型。LiDAR 系統捕獲的圖像中的每個像素都將具有與之關聯的深度。這樣可以更好地識別物體,并消除僅采用圖像傳感器獲得的2D圖像中可能存在的模糊。 LiDAR如何構建3D點云? LiDAR 通常使用直接飛行時間(dToF)技術來測量到物體的距離。短的
2021-04-06 12:00:085045 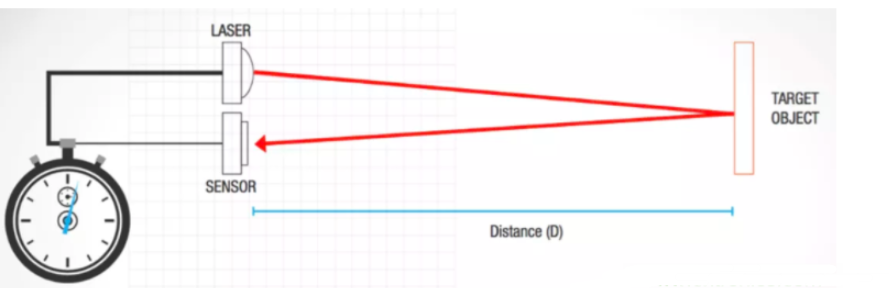
什么是光探測和測距 (LiDAR)?LiDAR 將雷達測距能力與相機的角分辨率相結合,提供準確的深度感知傳感以完成圖像。
2022-02-06 07:54:0012264 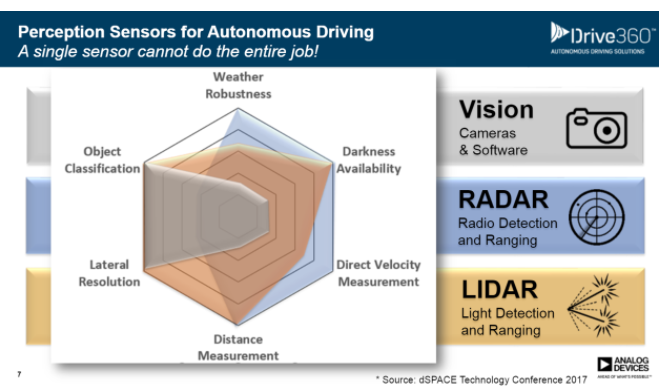
Contour2D傳感器系統能以最佳方式來有效檢測傳送帶的利用率。它是市場上唯一只需要一個LiDAR傳感器來執行此操作的系統。R2000 LiDAR傳感器的獨特性能和智能算法能確保可靠的陰影校正
2022-06-13 19:15:192152 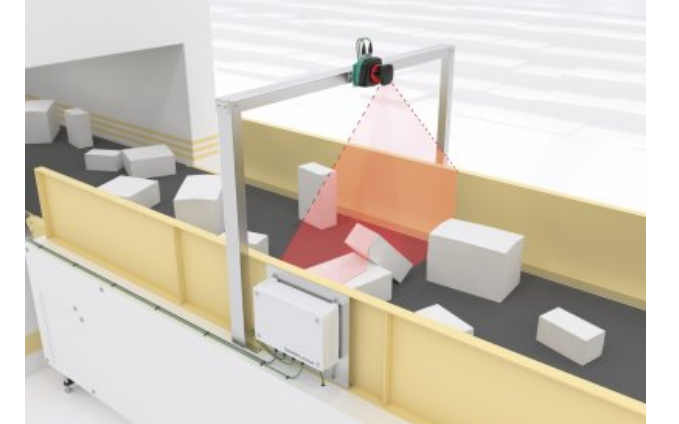
自動駕駛的出現決定性地擴大了汽車電子平臺中激光成像檢測和測距 (LiDAR) 傳感器的存在。LiDAR 根據雷達原理工作,但使用紅外激光二極管發出的光脈沖。
2022-07-27 11:10:491428 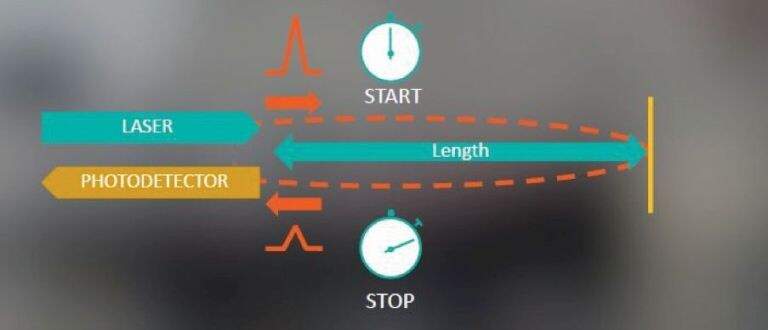
目前市場上最小、最輕的掃描LiDAR已經開始由LightWare LiDAR LLC發貨。
2021-08-17 11:19:381250 
,RADAR伴隨著大量的被動超聲波傳感器。然而,當談到價格點時,LIDAR仍然相對昂貴。對于想要親自動手或開發的設計師,Digi-Key現在擁有SparkFun Electronics的SEN-14032
2018-10-30 14:30:22
運動控制卡設置點位運動參數中平滑時間參數的作用是什么?
2022-04-26 11:46:41
運動控制系列:運動軸點動控制【控制要求】觸摸屏上增加左右箭頭用來控制軸1點動,按住向左的箭頭電機轉,松手就停。觸摸屏界面: 觸摸屏上添加位按鈕 點動進M1: Modbus地址 0x1001 點動退
2019-07-18 14:46:31
在用加速度傳感器ADXL345測量落體運動時,當初速度為0自由落體時,傳感器能夠正常檢測到。但是當初速度不為0或者旋轉時再扔出去,傳感器ADXL345就無法檢測到落體運動,請教如何解釋這一現象?如何解決?非常感謝,困擾我很長時間了
2023-12-29 06:45:48
各位專家,我們公司的產品需要使用到運動檢測功能,但是現在卻不知道來如何使用這個功能。
1. 在web頁面中勾選Motion Detection,但是運動檢測線程沒有被正常執行。
?
2. 強行
2018-06-21 14:44:57
該運動傳感器提供近距離傳感,覆蓋基于計算機視覺 (CV) 或LIDAR的解決方案的盲區,適用于機器人和無人機TDK InvenSense ICM-42688-P 6軸運動跟蹤慣性測量單元 (IMU
2020-05-23 00:45:07
申請理由:學校運動環境檢測,在學校操場設立監測點。并實時反饋到電腦上,可以由學生通過微信查看操場環境,是否適合鍛煉,使得學生生活更加健康。項目描述:初步方案:在學校操場設立監測點。并實時反饋到電腦上
2015-11-11 11:02:39
和 RS-LiDAR-Algorithms 感知算法三大部分組成。RS-Box 獨立運行RS-LiDAR-Algorithms 點云感知算法,為自動駕駛提供高精度實時定位、障礙物識別與分類、動態物體跟蹤等
2017-12-15 14:20:48
針對變頻器輸出電流的檢測分為硬件過流檢測和軟件過流檢測,硬件過流檢測是利用電流檢測電路實現輸出電流的檢測,當輸出電流超出整定時,電平翻轉觸發過流。軟件過流的檢測是什么原理,也是根據輸出電流的檢測判斷的嗎,是否要結合母線的電壓波動,軟件檢測和硬件檢測哪個響應更快?
2024-01-17 13:49:22
變頻器過流保護點測試測試說明:變頻器的過流保護點主要是用來防止出現變頻器輸出電流過大,導致模塊損壞的情況。具體根據不同系列的變頻器有不同的保護點。變頻器過流保護點分為軟件過流點和硬件過流點兩種
2018-04-04 10:21:25
變頻器過流保護點測試測試說明:變頻器的過流保護點主要是用來防止出現變頻器輸出電流過大,導致模塊損壞的情況。具體根據不同系列的變頻器有不同的保護點。變頻器過流保護點分為軟件過流點和硬件過流點兩種。此處
2018-04-08 09:19:31
XY末端加工點始終與被加工物體表面位置和姿態保持一致,實現了XYR的同步運動,可滿足XYR結構加工規模化生產的速度需求。
正運動技術在曲面外觀XYR檢測的運動控制解決方案:
正運動技術提供了一種
2024-04-16 17:58:32
如何利用高速ADC設計用于汽車的LIDAR系統?
2021-05-17 06:28:04
車輛的往返飛行時間(ToF)。當知道脈沖通過空氣的速度時,就可以計算出反射點的距離。這個脈沖可以是超聲波(聲納),也可以是無線電波(雷達)或光(LiDAR)。 這三種ToF技術,想擁有更高的角分辨率
2018-11-08 10:42:36
技術一樣,LiDAR使用激光來確定物體的距離,并且像使用相機和雷達圖像一樣,它可以使用卷積神經網絡(CNN)檢測道路上的物體??。 區別在于,在LiDAR中,傳感器會生成具有數千個點的3D點云數據
2020-08-20 19:22:01
通過審視五種運動檢測模式——加速度(包括平移運動,如位置和方向)、振動、沖擊、傾斜和旋轉,各自的可能性,可以超越當今大量MEMS應用的范圍,極大地擴大應用選項。MEMS加速度計和陀螺儀如何通過五類運動檢測實現各類最終產品的變革?接下來我們舉例來說明~
2019-07-30 07:47:02
我想做一個掃描軌跡,同時可以看清點的運動時的位置。例如:做一個圓形掃描,掃描一周需要10秒鐘,那么我想顯示任意時間,點的位置。求大神幫助指點。
2013-09-10 10:36:29
求助基于LABVIEW機構運動參數虛擬檢測平臺設計的程序
2015-04-13 16:55:59
這個是電機過流檢測電路,但是在過流是地,繼電器不的跳動,這是為什么?謝謝,
2013-05-13 09:24:21
請問LIDAR感知挑戰有哪些?
2021-06-17 11:49:08
攝像頭、雷達和LIDAR,自動駕駛汽車選擇誰?
2020-11-23 12:32:36
`10月12日下午,國內激光雷達創業公司RoboSense(速騰聚創)正式對外發布激光雷達的感知算法——RS-LiDAR-Algorithms感知算法1.0版本。此套件包括定位、路沿/可行駛區域檢測
2017-10-13 16:08:29
摘要:討論了序列圖像的運動目標檢測算法,在傳統的光流場計算方法的基礎上,提出了基于幀間差閾值法的快速光流算法。整個算法簡單、有效,保證了序列圖像中運動目標跟
2009-01-09 12:06:23 29
29 針對復雜環境下運動目標檢測提出一種基于像素分類的運動目標檢測算法。該算法通過亮度歸一化對圖像序列進行預處理,用以降低光照變化造成的誤檢,根據場景中不同像素點的
2009-04-10 08:51:014 相對運動·牽連運動·絕對運動兩個坐標系定坐標系(定系)動坐標系(動系)三種運動絕對運動:動點相對于定系的運動相對運動:動點相對于動系的運動牽連
2009-04-14 11:34:2720 現代檢測與補償技術越來越要求測量的高精度和實時性, 通過直接獲取運動誤差以避免誤差殘留的二次相移三點法, 為運動誤差的在線高精度檢測提供了一條有效途徑. 通過對3
2009-07-17 09:06:4333 目前,運動目標的檢測是計算機視覺領域中最活躍的研究主題之一。本文介紹了光流法、幀間差分等運動目標的檢測方法,提出了一種基于熵的
2009-09-08 09:31:0317 運動物體檢測是圖像處理和分析系統的關鍵技術,為了能夠更準確的檢測視頻流中的運動物體,本文提出了一種基于運動估計的運動物體檢測方法,該方法以運動估計過程中產生
2009-12-14 13:37:4816 提出一種幀間雙差分法、自適應光流、snake算法相結合的運動目標檢測方法。通過幀間雙差分法提取運動區域,針對運動區域進行光流計算,對光流計算結果進行C-均值聚類,最后用聚類
2010-03-01 13:56:3422 基于非下采樣Contourlet變換的運動點目標背景抑制算法??
摘 要:為了解決機載紅外預警探測系統檢測地面運動點目標時的結構化背景抑制,提出了一種基于非下
2010-05-12 09:10:1616 應用檢測IGBT集電極電壓的過流保護原理
圖10是應用檢測IGBT集電極電壓的過流保
2009-01-21 13:18:312447 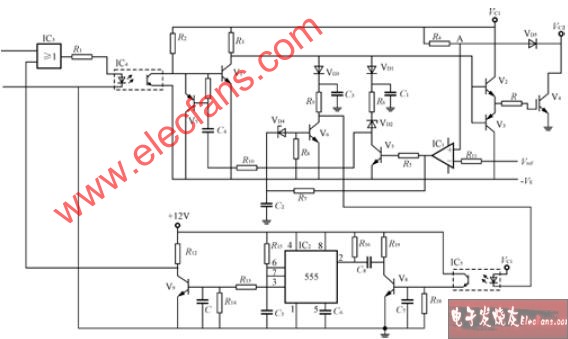
微波運動檢測器
這個
2009-09-26 16:01:554916 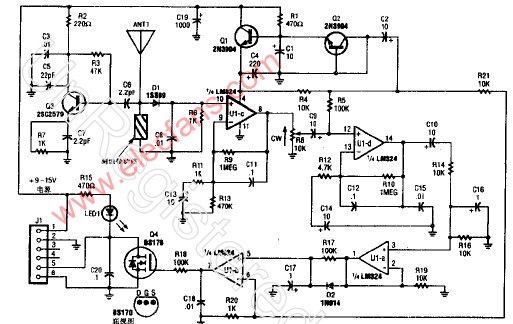
低信噪比運動紅外點目標的檢測
為解決高空背景條件下紅外低信噪比運動點目標的檢測問題,本文提出了一種基于膨脹累加的檢測方法.運用形態膨
2009-10-21 18:38:471007 
本內容提供了基于碼本模型的運動目標檢測算法
2011-05-19 10:54:0132 給出了一種運動人體區域的檢測及其對應的二維關鍵點的提取方法。首先運用幀差法構建一個自適應的背景模型以達到背景初始化和背景更新的目的。接著用減背景法實現二維運動人體
2012-02-08 11:39:0738 在介紹運動檢測以及光流的基本概念的基礎上引出基于光流方程的兩種常用的圖像分析方法--梯度法、塊匹配法;通過對光流法在紅外圖像序列的運動目標檢測、活動輪廓模型以及醫學
2013-04-08 09:19:1046 物體運動檢測電路原理圖都是值得參考的設計。
2016-05-11 17:33:1925 《OpenCV3編程入門》書本配套源代碼:用光流法進行運動目標檢測
2016-06-06 15:52:298 OpenCV3編程入門-源碼例程全集-用光流法進行運動目標檢測,感興趣的小伙伴們可以瞧一瞧。
2016-09-18 17:02:2517 視頻監控中的運動目標檢測
2016-12-17 17:07:301 基于置信傳播的視頻運動目標檢測_郭春生
2017-01-07 16:00:430 基于光流的運動目標檢測跟蹤快速算法_關興來
2017-03-16 15:42:481 本文檔內容介紹了建立無線運動檢測系統的設計應用,包括系統框架圖。
2017-09-18 10:45:086 基于DSP運動目標檢測系統的設計與實現
2017-10-19 14:16:479 分析和理解視頻序列是當前計算機視覺的重點研究鄰域。通常,運動目標檢測在自動視覺監控系統中起著基石的作用,同時它也是運動捕獲、活動分析等應用的基礎。運動目標檢測的基本操作就是將稱為前景的運動目標與稱為
2017-10-30 16:42:392 針對復雜運動背景中慢速小目標檢測誤檢率高,實時性差等問題,提出了基于自適應閡值分割的慢速小目標檢測算法。首先計算連續兩幀圖像特征點的金字塔光流場,對光流場進行濾波,獲取匹配特征點集合。然后對圖像運動
2017-11-09 15:17:321 運動目標檢測作為計算機視覺領域的熱點之一,在智能視頻監控、圖像檢索、運動分析等眾多領域都有著十分廣泛的應用。目前常用的運動目標檢測算法有幀間差分法、背景相減法、光流法等。這些方法主要是通過運動
2017-11-09 16:39:130 面向人群場景中異常擁擠行為檢測,提出基于光流計算的檢測方法。該方法首先采用光流微粒矢量場提取人群運動特征;然后基于社會力模型計算光流微粒之間的相互作用力;最后對相互作用力進行直方圖熵值處理來實現人群
2017-11-17 16:40:295 目標檢測算法。該算法結合背景減除法和幀間差分法,對當前幀像素點的運動狀態進行判斷,分別對靜止和運動的像素點進行替換和更新,采用最大類間方差( Otsu)法對差分圖像進行目標提取,并使用數學形態學運算去除目標中的
2017-12-01 15:22:052 為了解決日常拍攝的圖像或視頻中普遍存在局部運動模糊導致信息丟失的問題,提出一種基于能量估計的局部運動模糊檢測算法。該算法首先計算圖像的H arris特征點,根據每個區域內的特征點分布篩選出備選
2017-12-11 14:31:380 針對圖像序列中運動目標檢測、跟蹤的難點問題,提出了一種實時運動目標檢測與跟蹤算法。該算法基于自適應背景建模,獲取運動目標背景模型和前景圖像,從而實現運動目標檢測;通過建立運動目標的位置、大小、形狀
2017-12-12 17:35:353 輸電線路走廊中地物安全距離檢測是電力運維部門日常線路巡檢作業中的重要一環。結合此項運維實際需求,提出一種無人機電力巡檢LiDAR點云數據的自動安全距離診斷方法:首先依據己知的線路位置與走向對無人機
2017-12-21 09:52:463 量構成的集合通常被稱作光流場(optical flow),主要涉及一個從某一圖像序列中計算其可見點的三維速度矢量在成像表面上投影的過程,因而有些文獻也稱之為光流場計算或運動估計(motion estimation),是視頻壓縮、三維重建、運動目標檢測
2018-01-05 16:50:041 改進的前景提取算法提取運動前景;然后,通過Harris算子對運動前景區域提取特征點,應用光流約束的光流法對特征點建立運動矢量場;最后,通過建立KPA模型來判斷是否有緊急狀況發生。從理論分析和實驗表明,所提算法在不同環境
2018-01-05 17:01:060 檢測階段,首先提取兩幀帶檢測圖像的SIFT特征點并進行特征匹配,然后計算兩幀圖像之間的幾何變換矩陣,從而實現圖像的幾何對齊。再將幾何對齊后的兩幅圖像進行差分,并在差分圖像中尋找SAD最大值區域作為運動目標區域。在目標跟蹤階段,將已檢測到的目標作為跟蹤樣本,與后檢測到
2018-01-09 16:17:461 目前,直接切入全固態LiDAR或者正朝著全固態LiDAR轉型的國內外企業數量已逐步超越機械式LiDAR和混合固態LiDAR領域。
2018-06-01 17:42:003173 絕大部分LiDAR系統將在未來十年逐步轉為固態方案,但是,仍將會有一些具有真正高性能和高價值的旋轉式機械LiDAR傳感器。
2018-05-16 11:25:037222 據報道,現有LiDAR(激光雷達)系統已被用于從安全應用到測繪,再到工業自動化等各類創新應用。其中,汽車市場對LiDAR系統的發展和應用尤其關注。LiDAR掃描儀是自動駕駛汽車原型系統的關鍵組件,也是當前交通標志識別、自適應巡航控制(ACC)、盲點檢測、防撞系統和車道偏離警告等系統中的關鍵組件。
2018-08-13 10:03:003027 檢測頭是針形結構。旋轉軸通過減速器控制檢測頭旋轉。二維十字平臺控制旋轉軸的平面運動。被檢測物體固定以后,運動控制器要根據其外形控制檢測頭沿物體表面運動。
2018-10-07 10:04:005477 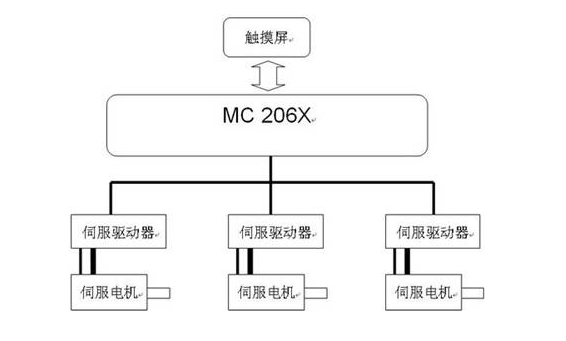
了運動圖像的光流場,比較分析了這兩種方法的運動估計效果,這為目標檢測、目標跟蹤提供了基礎。只在VC6.0的基礎上編寫少量代碼就能使算法得以實現,縮短了大量編程時間,提高了工作效率。
2019-10-15 11:56:4912 除了攝像頭和雷達,第三種傳感器——激光雷達( LiDAR )也愈發受歡迎。如同雷達技術一樣,LiDAR 利用激光來測定物體的距離,并且像攝像頭和雷達圖像一樣,它可以使用卷積神經網絡( CNN )來檢測道路上的物體。
2020-09-03 09:44:512785 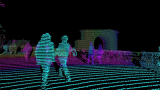
全球領先的工業傳感器和傳感器系統制造商倍加福(Pepperl+Fuchs)的 R2300 多層掃描儀,用于三維物體檢測,具有極高的測量密度,讓人印象深刻:外殼緊湊且易于集成,并包含高精度 LiDAR
2020-10-30 04:49:42901 iPhone12Pro是蘋果公司的第一款智能手機,背面配有光檢測和測距(LiDAR)掃描儀。但是LiDAR的作用是什么,Apple計劃將來使用它嗎?
2020-11-03 09:59:4214252 自動駕駛中的激光雷達點云如何做特征表達,將基于Lidar的目標檢測方法分成了4類,即:基于BEV的目標檢測方法,基于camera/range view的目標檢測方法,基于point-wise
2021-02-17 13:47:004600 
LiDAR 代表 Light Detection and Ranging,即通過光帶中的電磁輻射進行(遠程)檢測和測量。該設備應用了雷達的經典而簡單的原理,但它確實使用了由激光脈沖制成的光束。
2021-06-26 16:04:013162 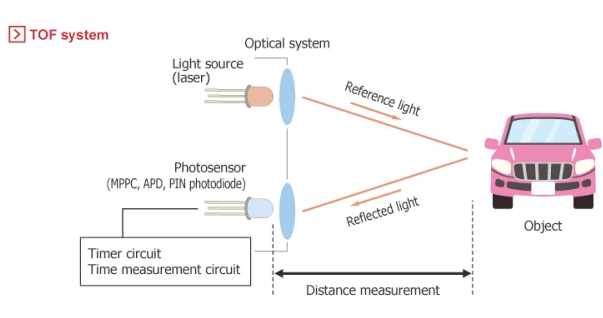
流體網絡顆粒在流場中運動的仿真模擬
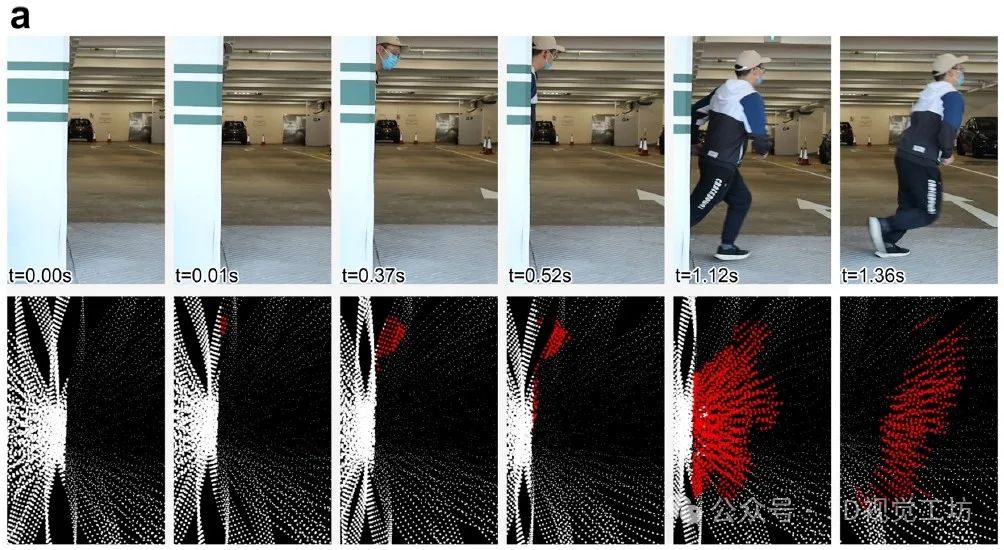
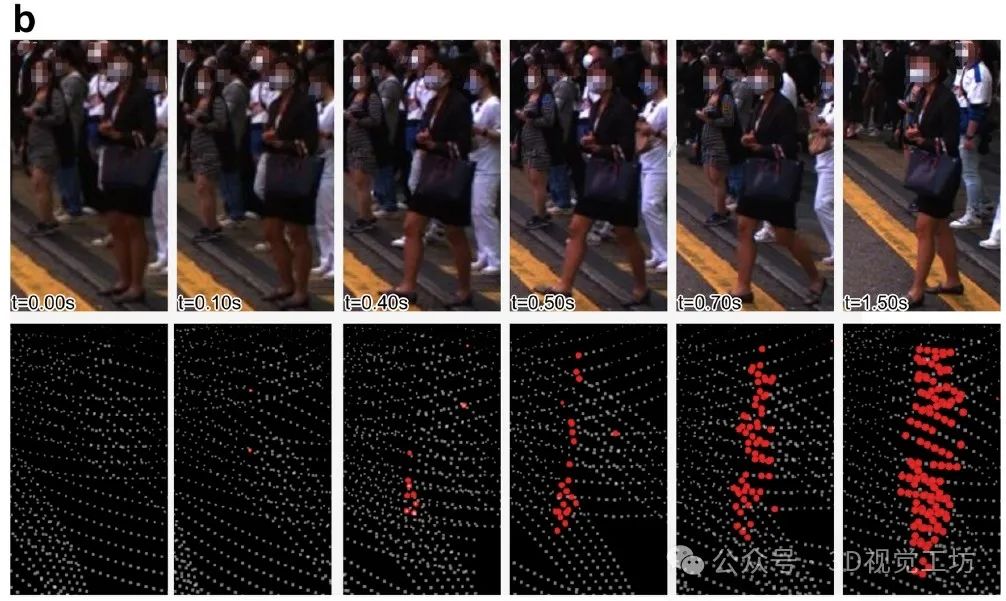
2021-07-05 15:23:028 激光雷達生成高精度的點云,許多技術將其作為一個模塊來應用。但處理和存儲產生大量數據一直是一個很大的挑戰。本文將通過背景減法揭示如何在設備端上進行運動檢測,減少傳輸的總數據。 LiDAR技術的發展已經
2021-08-16 14:46:473528 該項目將借助KV260上的PYNQ-DPU覆蓋,從而能夠使我們在LiDAR點云上進行3D對象檢測比以往任何時候都更加高效!
2022-04-26 17:41:333149 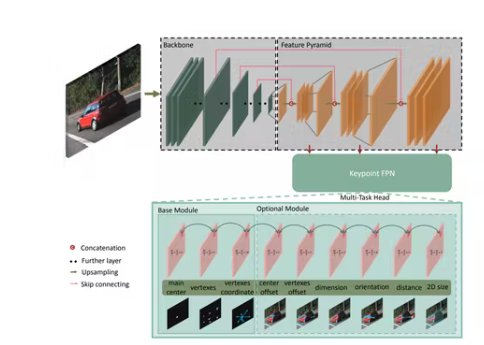
自動駕駛中的激光雷達點云如何做特征表達,將基于Lidar的目標檢測方法分成了4類,即:基于BEV的目標檢測方法,基于camera/range view的目標檢測方法,基于point-wise
2022-11-15 10:23:172532 在汽車LiDAR發展的早期,市場是由AV市場驅動的。近年來,LiDAR的應用、市場細分和全球汽車行業的政治都發生了巨大變化。 造成這一劇變的最大因素是,AV并沒有批量出現。AV的市場前景仍然渺茫,距離大規模起飛還差得很遠。
2022-11-22 15:39:312213 電子發燒友網站提供《運動方向檢測器.zip》資料免費下載
2022-11-23 11:26:300 故FMWC LiDAR的距離分辨率取決于發射信號的帶寬,帶寬越大,距離分辨率也越大。而當帶寬一樣時,無論信號持續的時間如何變化都不會影響LiDAR的距離分辨率。
2022-11-23 11:27:302481 電子發燒友網站提供《基于PIR的運動檢測器.zip》資料免費下載
2022-12-07 15:28:211 電子發燒友網站提供《使用PIR運動傳感器和Surilli GSM檢測運動.zip》資料免費下載
2022-12-28 09:38:570 電子發燒友網站提供《簡單的運動檢測器.zip》資料免費下載
2022-12-30 09:39:451 這個工作來自于浙江大學和DAMO academy。在點云配準領域,盡管已經有很多方法被提出來,但是無論是傳統方法,還是近年來蓬勃發展的基于深度學習的三維點云配置方法,其實在真正應用到真實的LiDAR掃描點云幀時都會出現一些問題。
2023-01-12 17:33:482447 運動目標檢測的主要目的是從圖片序列中將變化區域或者運動物體從背景圖像中分離出來,常用于視頻監控、異常檢測、三維重建、實時定位與建圖等領域。運動目標檢測是許多領域應用落地的基礎,近年來被廣泛地關注和研究,對運動無人機檢測亦是如此。目前,運動目標檢測的基本方法主要包括背景消減法、幀間差分法和光流法。
2023-04-10 16:42:301780 對象物并反射回來的時間差。 【LiDAR示意圖】 LiDAR的特點在于它不僅可以準確地檢測到達對象物的距離,還可以準確地
2023-04-30 14:41:005585 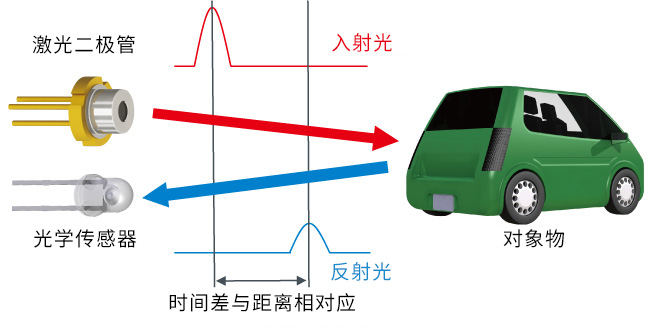
如何利用LiDAR實現深度感測
2023-12-06 16:19:571270 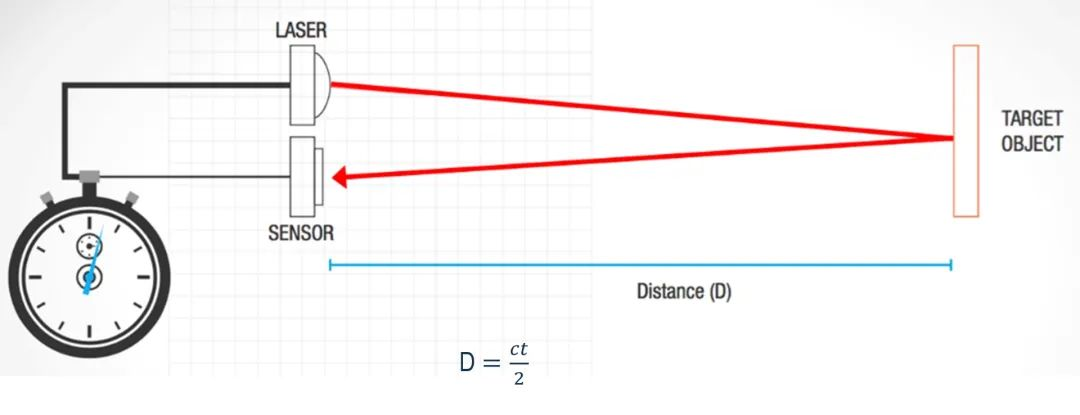
在車輛的所有傳感器中,LiDAR經歷的動蕩最大,甚至連領先的LiDAR公司都始料未及。即使是像Valeo這樣的LiDAR先驅,也無法保證能跟上瞬息萬變的市場格局。
2024-02-21 09:11:331702 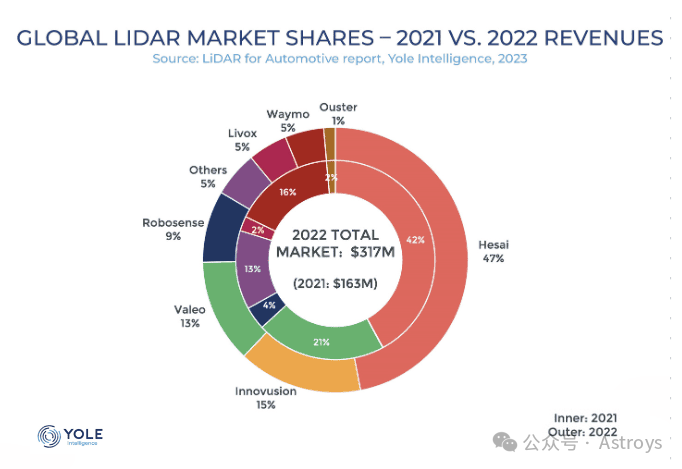
NeRF-LiDAR將圖像和點云模態整合到激光雷達合成中,而諸如LiDAR-NeRF和NFL之類的僅激光雷達的方法探索了在沒有RGB圖像的情況下進行激光雷達重建和生成的可能性。
2024-04-10 12:34:552036 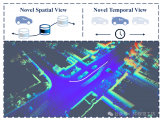
aiSim中的LiDAR是一種基于光線追蹤的傳感器,能夠模擬真實LiDAR發射的激光束,將會生成LASv1.4標準格式的3D點云,包含了方位角、俯仰角和距離等。aiSim能夠模擬LiDAR單態
2024-04-24 14:58:471892 
并反射回來的時間差。 LiDAR 的特點在于它不僅可以準確地檢測到達對象物的距離,還可以準確地檢測位置和形狀。 LiDA
2024-05-16 18:56:091851 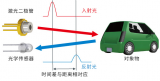
、形狀等信息。LiDAR技術在地形測繪、城市規劃、林業、交通、考古等領域有著廣泛的應用。本文將介紹LiDAR激光點云數據處理軟件的處理流程。 一、LiDAR數據采集 飛行平臺選擇:LiDAR數據采集通常需要搭載在飛行平臺上,如無人機、直升機或固定翼飛機。根據項目需求和預算,選擇
2024-08-29 17:05:503326
 電子發燒友App
電子發燒友App








 工商網監
工商網監
評論