") 如何利用LiDAR實(shí)現(xiàn)深度感測(cè)
如何利用LiDAR實(shí)現(xiàn)深度感測(cè)

LiDAR簡(jiǎn)介
LiDAR的全稱是Light Detection and Ranging(激光探測(cè)及測(cè)距),是一種利用激光感測(cè)距離的方法,它會(huì)測(cè)量激光從物體反射回來(lái)所用的時(shí)間而達(dá)到測(cè)距的目的。根據(jù)具體應(yīng)用,可以使用不同的波長(zhǎng),但最常用的是紅外線(IR)。
大多數(shù)時(shí)候,人腦擅長(zhǎng)推斷物體的相對(duì)深度/距離和大小,這是人類的一種本能,尤其是在駕駛車輛時(shí)。但成像系統(tǒng)卻很難做到這一點(diǎn),尤其是標(biāo)準(zhǔn)圖像傳感器是用2D圖像表示3D場(chǎng)景。在類似于人眼的立體布局中使用兩個(gè)圖像傳感器,能夠提取深度數(shù)據(jù),但測(cè)距精度有限,并且會(huì)受到環(huán)境光線的影響。
使用LiDAR獲得深度數(shù)據(jù)就可以在不依賴光線條件的情況下實(shí)施測(cè)量,并消除圖像的模糊問(wèn)題,從而做到場(chǎng)景中區(qū)分及理解不同物體。將發(fā)射到物體后反射回來(lái)的光脈沖與精準(zhǔn)定時(shí)測(cè)量相結(jié)合,可以計(jì)算出物體的距離。
LiDAR在汽車領(lǐng)域的應(yīng)用十分廣泛,尤其是用于SAE級(jí)別為L(zhǎng)3~L5的半自動(dòng)駕駛車輛,例如,感測(cè)車輛周圍的物體;在高速公路上看到數(shù)百米外的前方。LiDAR也常用于送貨機(jī)器人和其他需要自主感知的應(yīng)用。該技術(shù)也廣泛應(yīng)用于以高精度快速生成可處理的3D深度圖的戶外應(yīng)用情景——而使用傳統(tǒng)測(cè)量技術(shù)時(shí),這一過(guò)程需要耗時(shí)數(shù)日。
例如,農(nóng)業(yè)領(lǐng)域使用LiDAR測(cè)量田地或土地,繪制地圖、評(píng)估作物狀況,從而使農(nóng)民能夠建模預(yù)測(cè)作物產(chǎn)量,以及選擇最合適的農(nóng)藥/肥料。對(duì)于儲(chǔ)存在筒倉(cāng)中的谷物和儲(chǔ)存在貯存罐中的液體,只需在筒倉(cāng)/貯存罐頂部安裝LiDAR,即可在不與內(nèi)容物接觸的情況下立即測(cè)量?jī)?chǔ)量。
環(huán)境組織經(jīng)常使用LiDAR來(lái)評(píng)估森林砍伐情況、測(cè)量海岸侵蝕情況或監(jiān)測(cè)冰川消退情況。此外,在這些應(yīng)用中,通過(guò)在無(wú)人駕駛飛行器(UAV)/無(wú)人機(jī)上安裝LiDAR,研究人員能夠?qū)θ僳E罕至的偏遠(yuǎn)地區(qū)進(jìn)行勘測(cè),而無(wú)需親自前往。
智能工廠在自動(dòng)引導(dǎo)車(AGV)上使用LiDAR,運(yùn)輸原材料進(jìn)行加工,并將成品運(yùn)送到發(fā)貨區(qū)。當(dāng)智能工廠中的機(jī)器人使用LiDAR時(shí),可以充分發(fā)揮LiDAR自身的強(qiáng)大功能,幫助這些機(jī)器人精確執(zhí)行任務(wù),并使它們能夠感測(cè)周圍是否有人,從而以周到和安全的方式工作。
LiDAR可用于快速勘測(cè)鐵路或高速公路等大型建設(shè)項(xiàng)目。LiDAR還可以作為一種安全輔助手段,使某些區(qū)域免受不必要或意外的入侵。這在存在危險(xiǎn)物質(zhì)或有大型機(jī)器工作的地方意義重大。LiDAR在所有照明條件下都能有效工作,意味著在這些類型的應(yīng)用中,它可以提供可靠的永遠(yuǎn)在線的保護(hù)。
LiDAR的類型
最常見(jiàn)的LiDAR類型是直接飛行時(shí)間(dToF)系統(tǒng),其背后的原理非常簡(jiǎn)單:測(cè)量光脈沖到達(dá)目標(biāo)并返回傳感器所用的時(shí)間。光速是一個(gè)已知的物理常數(shù),因此計(jì)算發(fā)射器/探測(cè)器和反射目標(biāo)之間的距離十分簡(jiǎn)單。
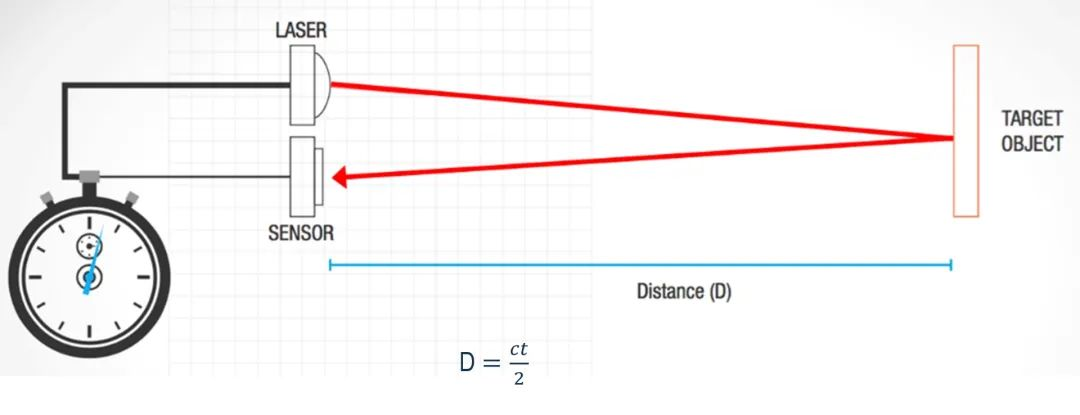
圖 1:dTOF可測(cè)量光到達(dá)目標(biāo)并返回所需的時(shí)間
該技術(shù)通常使用由光源(最常見(jiàn)的是激光器)發(fā)射的單個(gè)非常短的脈沖,發(fā)射同時(shí)會(huì)激活一個(gè)精確的計(jì)時(shí)器。當(dāng)光脈沖擊中范圍內(nèi)的物體時(shí),它將反射回到通常與激光器并置排列的高靈敏度光傳感器。一旦探測(cè)到返回脈沖,計(jì)時(shí)器就停止計(jì)時(shí),這時(shí)可讀取到達(dá)物體并返回所用的時(shí)間。
只要知道從發(fā)送脈沖到收到回波經(jīng)過(guò)的時(shí)間(t),使用光速常數(shù)(c)計(jì)算到目標(biāo)物體的距離(D)就很簡(jiǎn)單了。
dToF方法快速有效,可以測(cè)量多個(gè)回波,因此能夠探測(cè)LiDAR視野內(nèi)的多個(gè)物體。它能夠用于遠(yuǎn)程和近程 (0.1 m~300 m)應(yīng)用,并且在整個(gè)范圍內(nèi)保持穩(wěn)定的高精度。
另一種LiDAR方法稱為間接飛行時(shí)間(iToF),同樣使用來(lái)自激光的連續(xù)光波。這種方法不會(huì)直接測(cè)量經(jīng)過(guò)的ToF,而是根據(jù)已發(fā)射和已接收波形之間的相位差來(lái)確定ToF。
iToF技術(shù)更適合相對(duì)短的距離測(cè)量(<10 m),尤其是光線條件沒(méi)有室外那么具有挑戰(zhàn)性的室內(nèi)應(yīng)用,室外的對(duì)比度通常要高得多。該技術(shù)只能探測(cè)到最強(qiáng)的回波,因此只能探測(cè)單個(gè)物體。
第三種LiDAR是調(diào)頻連續(xù)波(FMCW),適合近程和遠(yuǎn)程測(cè)距。該技術(shù)用可調(diào)諧激光器來(lái)產(chǎn)生連續(xù)光波,所產(chǎn)生的光波將在探測(cè)器處與反射光混合。這種混合可在本地波形和反射波形之間產(chǎn)生拍頻,由此計(jì)算出物距和方向速度。
雖然FMCW既有出色的測(cè)距性能,還能捕獲方向速度信息,但由于要使用帶有偏振控制的可調(diào)諧激光器,并且依賴短波紅外波長(zhǎng)(要求激光器和探測(cè)器使用特殊半導(dǎo)體),這種LiDAR系統(tǒng)的總體成本大大增加。
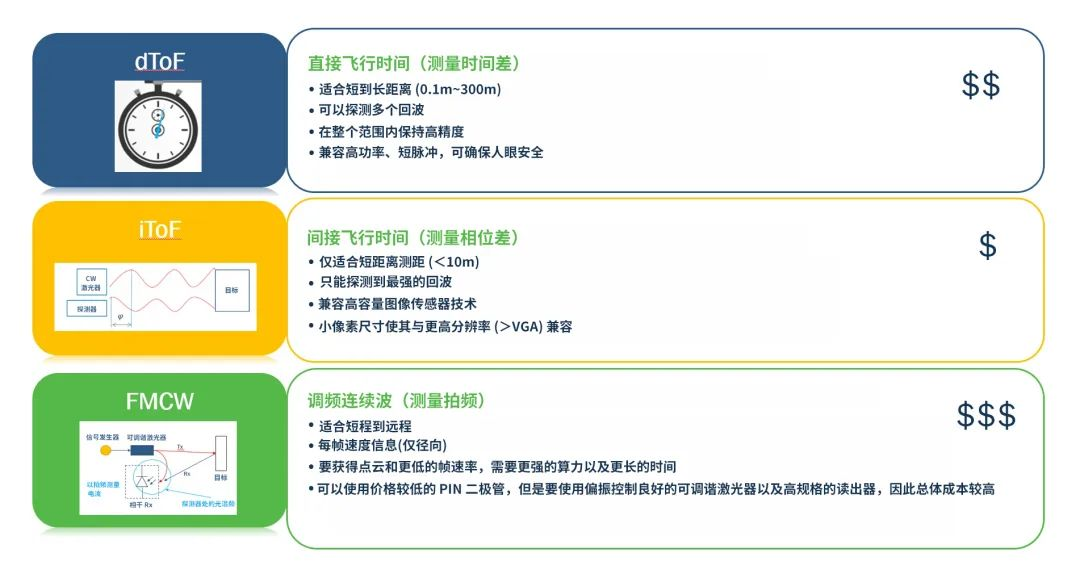
圖 2:基于LiDAR的深度感測(cè)方法比
“波長(zhǎng)大辯論”
圍繞LiDAR最有爭(zhēng)議的話題之一是使用哪種波長(zhǎng)。IR的使用優(yōu)先于可見(jiàn)光,因?yàn)楸尘癐R要少得多,所得信噪比(SNR)更好,從而使探測(cè)返回光變得更加容易。
IR光譜范圍內(nèi)有多個(gè)合適的波長(zhǎng),包括近紅外(NIR)光譜(850 nm、905 nm、940 nm)和短波紅外(SWIR)光譜(1350 nm、1550 nm)。決定具體使用哪種波長(zhǎng)是“波長(zhǎng)大辯論”的關(guān)鍵議題。有三個(gè)最重要的標(biāo)準(zhǔn)需要考慮,分別是系統(tǒng)的性能、是否有合適的組件和系統(tǒng)的總體成本。
探測(cè)器是任何LiDAR系統(tǒng)中最基本的組件之一。CMOS硅基探測(cè)器可探測(cè)到波長(zhǎng)在400 nm至1000 nm范圍內(nèi)的光,因此其對(duì)可見(jiàn)光和NIR光敏感,但不能感測(cè)SWIR光。為了探測(cè)SWIR光,就必須使用InGaAs合金等III/V族半導(dǎo)體,與硅相比,InGaAs合金非常昂貴。
組件可用性是另一個(gè)考慮因素,尤其是就激光發(fā)射器而言。邊緣發(fā)射激光器(EEL)正逐漸為垂直腔面發(fā)射激光器(VCSEL)所取代,后者更容易封裝成陣列,并且在整個(gè)溫度范圍內(nèi)波長(zhǎng)穩(wěn)定。雖然VCSEL目前的能效較低,價(jià)格也較高,但隨著它們應(yīng)用范圍的不斷拓展,這種情況有望得到改善。
盡管SWIR EEL有多家供應(yīng)商,但目前SWIR VCSEL只有一家供應(yīng)商,而NIR VCSEL也有多家供應(yīng)商。因此,選擇NIR更有可能提高供應(yīng)鏈的安全性。
探測(cè)范圍很重要,因?yàn)檫@能夠增加可用的反應(yīng)時(shí)間,從而提高安全性。但激光過(guò)強(qiáng)會(huì)傷害眼睛,因此IEC 60825規(guī)定了1ns激光脈沖的最大容許照射量(MPE)。
雖然NIR必須具有較低的MPE,但如果脈沖寬度縮短,則可以提高激光功率,而由于使用靈敏的探測(cè)器,可以達(dá)到最長(zhǎng)300 m的測(cè)距范圍。在天氣好的時(shí)候,SWIR的測(cè)距范圍將超過(guò)NIR,但是SWIR更容易受到濕氣(如雨或霧)的不利影響,因此基于NIR的系統(tǒng)的性能下降速度將低于SWIR系統(tǒng),從而可以在各種天氣條件下提供更一致的性能。
基于以上所述,通常認(rèn)為NIR是汽車LiDAR的首選波長(zhǎng)。NIR使得我們可以使用硅基器件,而不是InGaAs等更加昂貴的材料,可能更重要的是,相關(guān)組件可以從多個(gè)供應(yīng)商處獲得,有助于建立起更強(qiáng)大的供應(yīng)鏈。雖然NIR和SWIR在工作時(shí)都能夠確保人眼安全,但NIR在使用較低功率激光的同時(shí),仍然能夠滿足汽車LiDAR的要求。
從商業(yè)角度來(lái)看,NIR的成本要低得多,而成本一直是汽車應(yīng)用方面的一個(gè)重要考慮因素。IHS Markit的一項(xiàng)調(diào)查(Amsrud,2019)顯示,激光器和探測(cè)器的每通道成本約為4至20美元,而對(duì)于類似的SWIR系統(tǒng),每通道成本約為275美元。即使有了進(jìn)一步發(fā)展、容量增加,但預(yù)計(jì)NIR的成本仍將比SWIR低10~100倍。
LiDAR構(gòu)成技術(shù)
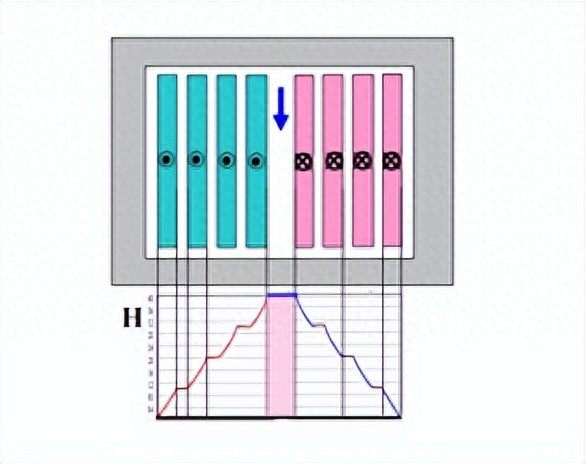
任何LiDAR系統(tǒng)最重要的元件之一是可捕獲和量化反射激光的感測(cè)元件。雖然可以使用多種技術(shù)來(lái)實(shí)現(xiàn)這一點(diǎn),但硅光電倍增器(SiPM)通常表現(xiàn)最好,這主要是因?yàn)樗軌蛞越?,000,000數(shù)量級(jí)的高增益來(lái)探測(cè)單個(gè)光子。
因此,近年來(lái)SiPM的應(yīng)用越來(lái)越廣泛,已然成為L(zhǎng)iDAR深度感測(cè)應(yīng)用的首選傳感器。與雪崩光電二極管(APD)等傳統(tǒng)探測(cè)器(不僅增益低得多,還需要對(duì)傳入信號(hào)進(jìn)行積分)相比,這些器件能夠在高對(duì)比度條件下為長(zhǎng)距離測(cè)距提供最高的SNR性能。其他優(yōu)勢(shì)包括電源偏置更低、均勻性更好,以及對(duì)溫度變化的靈敏度降低等,使得SiPM成為使用APD的系統(tǒng)的理想升級(jí)選項(xiàng)。SiPM靈敏度更高,可以使用小封裝光模塊,因此使LiDAR更容易集成到車輛中。由于SiPM采用高容量CMOS工藝生產(chǎn),這些高性能器件的探測(cè)器成本最低,進(jìn)一步推動(dòng)了LiDAR的普及。
安森美(onsemi)的ArrayRDM-0112A20-QFN是一個(gè)具有0.47 mm x 1.12 mm SiPM像素的1×12單片陣列,基于先進(jìn)的專有RDM SiPM CMOS工藝,專為實(shí)現(xiàn)對(duì)NIR光的高靈敏度而開(kāi)發(fā),能夠在905 nm波長(zhǎng)下使光子探測(cè)效率(PDE)達(dá)到行業(yè)領(lǐng)先的18.5%。在這個(gè)波長(zhǎng)下,響應(yīng)度大于100 kA/W。
由于SiPM的內(nèi)部增益高,靈敏度可降至單光子水平,再加上高PDE,能夠探測(cè)出微弱的返回信號(hào)。這使得LiDAR系統(tǒng)可以探測(cè)更遠(yuǎn)距離的低反射率目標(biāo)。該陣列采用穩(wěn)定可靠的10 mm x 5.2 mm QFN封裝,可以訪問(wèn)12個(gè)獨(dú)立像素。
該陣列專為汽車LiDAR系統(tǒng)(包括閃光燈、機(jī)械或MEMS掃描LiDAR)而設(shè)計(jì),是第一個(gè)獲得AEC-Q102 汽車認(rèn)證的陣列,并已根據(jù)IATF 16949標(biāo)準(zhǔn)進(jìn)行開(kāi)發(fā)。由于該陣列成本低、性能高,可以實(shí)現(xiàn)經(jīng)濟(jì)高效的遠(yuǎn)程LiDAR方案,提高汽車的安全性和自主性水平。
總結(jié)
LiDAR是一項(xiàng)有著重要意義的技術(shù),因?yàn)樗膾呙柘到y(tǒng)能夠快速準(zhǔn)確地確定深度,既可以進(jìn)行單點(diǎn)掃描,也可以繪制物體或大型場(chǎng)地的3D圖。
在規(guī)劃LiDAR設(shè)計(jì)時(shí),關(guān)鍵是要決定使用哪種IR光波長(zhǎng)。綜合考量性能、是否有合適的組件和商業(yè)因素,NIR通常是首選。
在大多數(shù)LiDAR實(shí)現(xiàn)過(guò)程中,激光光源可能相對(duì)簡(jiǎn)單,但探測(cè)器的選擇對(duì)系統(tǒng)性能有很大影響。安森美的最新SiPM陣列具有出色的探測(cè)性能,更重要的是,對(duì)于汽車應(yīng)用來(lái)說(shuō),它是首款獲得AEC-Q102認(rèn)證的SiPM探測(cè)器。
參考文獻(xiàn)
Amsrud, P.(2019 年 9 月 25日)。實(shí)現(xiàn)低成本LiDAR系統(tǒng)的競(jìng)爭(zhēng)[會(huì)議報(bào)告]。汽車LiDAR 2019,美國(guó)密歇根州底特律。
文章來(lái)源: 安森美
審核編輯 黃宇
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
31073瀏覽量
222182 -
激光
+關(guān)注
關(guān)注
21文章
3657瀏覽量
69624 -
感測(cè)
+關(guān)注
關(guān)注
0文章
24瀏覽量
13125 -
LIDAR
+關(guān)注
關(guān)注
11文章
367瀏覽量
31454
發(fā)布評(píng)論請(qǐng)先 登錄
探索MAX40662:用于LiDAR的四通道跨阻放大器
雙目視覺(jué)是如何實(shí)現(xiàn)深度估計(jì)的?

穿孔機(jī)頂頭檢測(cè)儀 機(jī)器視覺(jué)深度學(xué)習(xí)
LiDAR線圈如何驅(qū)動(dòng)無(wú)人駕駛技術(shù)
智駕感知系統(tǒng)中立體視覺(jué)相對(duì)于LiDAR的性能優(yōu)勢(shì)

感溫光纜 vs 感溫電纜:一場(chǎng)技術(shù)代際的對(duì)話

如何利用Trace機(jī)制實(shí)現(xiàn)LLCP預(yù)覽功能
從手動(dòng)操作到無(wú)感交互,BLE如何深度賦能靠近開(kāi)鎖方案

漏感磁集成設(shè)計(jì),陽(yáng)光電源的思路是什么?
海光DCU率先展開(kāi)文心系列模型的深度技術(shù)合作 FLOPs利用率(MFU)達(dá)47%
港大開(kāi)發(fā)新型無(wú)人機(jī)飛控,LiDAR傳感器采集信息傳至云端生成路徑
如何打造高參與感課堂?來(lái)看看廣凌智慧教室建設(shè)方案!

SONY推出新型dTOF激光雷達(dá)(LiDAR)深度傳感器AS-DT1
智慧教室建設(shè)方案:如何打造高參與感課堂,提升教學(xué)效果?




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論