") 什么是LiDAR(激光探測(cè)與測(cè)距)
什么是LiDAR(激光探測(cè)與測(cè)距)

LiDAR(激光探測(cè)與測(cè)距)
LiDAR是Light Detection And Ranging(激光探測(cè)與測(cè)距)的縮寫,是使用近紅外光、可見(jiàn)光或紫外光照射對(duì)象物,并通過(guò)光學(xué)傳感器捕獲其反射光來(lái)測(cè)量距離的遙感(使用傳感器從遠(yuǎn)處進(jìn)行感應(yīng))方法。
也被稱為“Laser Imaging Detection And Ranging(激光成像檢測(cè)與測(cè)距)”,通常以脈沖狀近紅外激光照射對(duì)象物,計(jì)量光線到達(dá)對(duì)象物并反射回來(lái)的時(shí)間差。
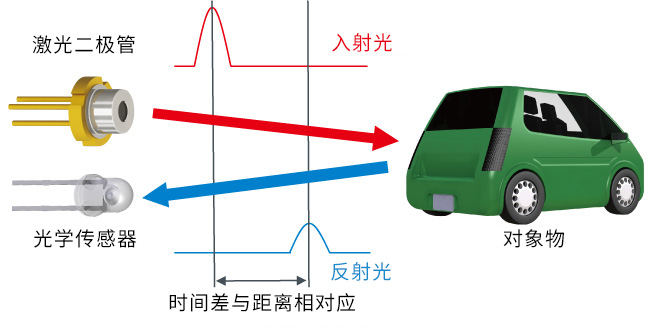
【LiDAR示意圖】
LiDAR的特點(diǎn)在于它不僅可以準(zhǔn)確地檢測(cè)到達(dá)對(duì)象物的距離,還可以準(zhǔn)確地檢測(cè)位置和形狀。
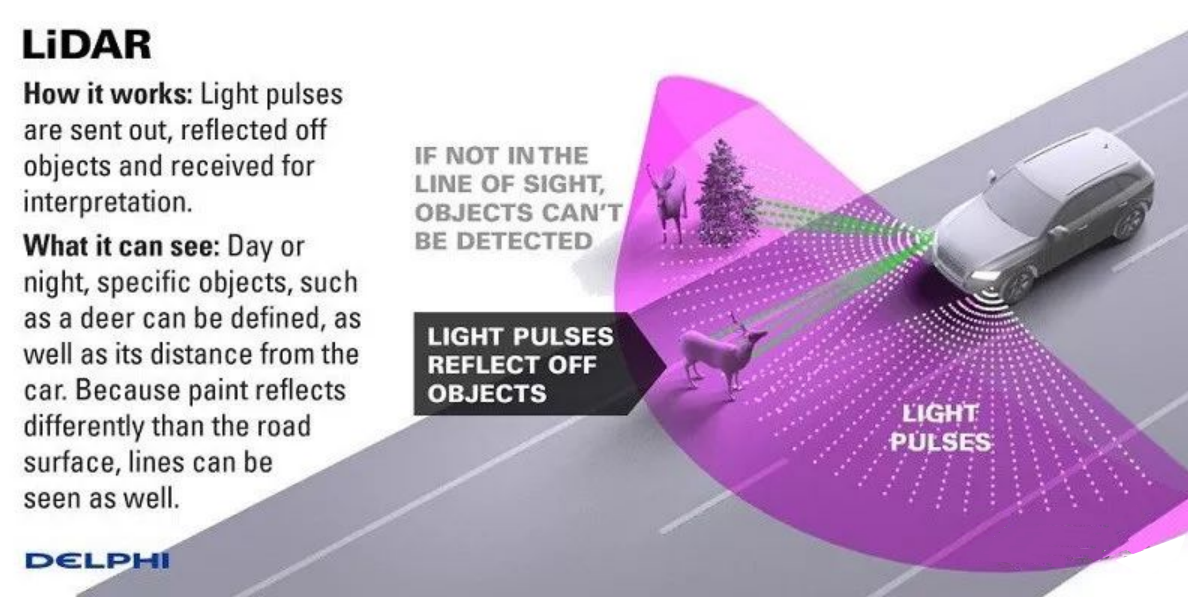
LiDAR應(yīng)用示例
談到使用LiDAR技術(shù)的應(yīng)用,首先想到的是汽車的高級(jí)自動(dòng)駕駛系統(tǒng)。 據(jù)稱該技術(shù)是實(shí)現(xiàn)全自動(dòng)駕駛(五級(jí))所必不可少的技術(shù)。
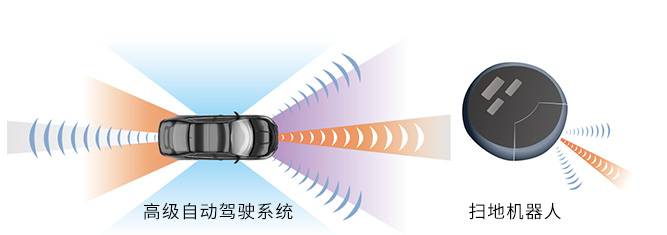
【LiDAR應(yīng)用示例】
此外,該技術(shù)還被用于高精度檢測(cè)人和物體,例如消費(fèi)電子領(lǐng)域的掃地機(jī)器人和高爾夫測(cè)距儀,以及工業(yè)設(shè)備領(lǐng)域的自動(dòng)搬運(yùn)車(AGV)和服務(wù)機(jī)器人等。
-
激光
+關(guān)注
關(guān)注
21文章
3658瀏覽量
69625 -
LIDAR
+關(guān)注
關(guān)注
11文章
367瀏覽量
31455
發(fā)布評(píng)論請(qǐng)先 登錄
用TFMini LiDAR傳感器和Arduino實(shí)現(xiàn)激光測(cè)距
急求一個(gè)LIDAR Lite V2激光測(cè)距模塊
如何選擇汽車LiDAR的激光器和光電探測(cè)器
ROHM | 開(kāi)發(fā)出LiDAR 用 75W 高輸出功率激光二極管“RLD90QZW3”
使用FieldFox手持式分析儀進(jìn)行汽車射頻/微波系統(tǒng)驗(yàn)證和故障診斷測(cè)試
首款基于LiDAR技術(shù)的安全解決方案,有助于國(guó)家邊界的監(jiān)控和防護(hù)
基于ADC技術(shù)實(shí)現(xiàn)汽車激光探測(cè)與測(cè)距系統(tǒng)的設(shè)計(jì)
超越汽車激光雷達(dá)的LiDAR激光測(cè)距技術(shù)
FEV、亮道和Ibeo聯(lián)手打造自動(dòng)駕駛和ADAS解決方案
LiDAR光探測(cè)和測(cè)距的簡(jiǎn)單介紹
LiDAR激光雷達(dá)技術(shù)原理及Arduino示例代碼糾錯(cuò)
硬核,從零制作一個(gè)激光雷達(dá)需要多久?

做一個(gè)激光雷達(dá),需要哪些基本部件?

激光雷達(dá)LIDAR基本工作原理




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論