激光三角測(cè)距法作為低成本的激光雷達(dá)設(shè)計(jì)方案,可獲得高精度、高性價(jià)比的應(yīng)用效果,并成為室內(nèi)服務(wù)機(jī)器人導(dǎo)航的首選方案,本文將對(duì)激光雷達(dá)核心組件進(jìn)行介紹并重點(diǎn)闡述基于激光三角測(cè)距法的激光雷達(dá)原理。
2023-12-27 18:20:33 2376
2376 
電子發(fā)燒友網(wǎng)報(bào)道(文/周凱揚(yáng))在激光雷達(dá)市場(chǎng),除了沖擊車規(guī)、低成本和快速量產(chǎn)外,追求更大的視場(chǎng)角、分辨率和探測(cè)距離也是比較常見(jiàn)的競(jìng)爭(zhēng)方向。靠機(jī)械結(jié)構(gòu)與電機(jī)旋轉(zhuǎn)的機(jī)械激光雷達(dá)無(wú)疑視場(chǎng)角最廣、精度最高
2023-02-03 02:08:003961 在1萬(wàn)多小時(shí),脈沖TOF的激光器是無(wú)限時(shí)間。業(yè)內(nèi)最新的三角測(cè)距法激光雷達(dá)將測(cè)量速度4000次/秒,提高到了16000次/秒,等效60us測(cè)量一次,激光器占空比壓縮了四倍,意味著激光器連續(xù)壽命減少4倍
2018-11-09 19:49:16
求一激光測(cè)距雷達(dá)模塊最大測(cè)距30~50米即可測(cè)量精度10cm(要求可稍稍降低)價(jià)格在1000元以內(nèi)
2015-07-09 16:01:13
`我們已經(jīng)對(duì)單線激光雷達(dá)司空見(jiàn)慣,其旋轉(zhuǎn)線掃的測(cè)量方式導(dǎo)致造成壽命問(wèn)題和價(jià)格居高不下。 因此,北醒研發(fā)了CE30,它是一款具有大視場(chǎng)角的固態(tài)激光雷達(dá)。它可同時(shí)輸出132°水平視場(chǎng)、9度垂直視場(chǎng)范圍內(nèi)
2018-01-11 09:21:13
想了解行業(yè)國(guó)內(nèi)做固態(tài)激光雷達(dá)的廠家,激光雷達(dá)里面是怎么樣的啊
2021-01-17 15:29:39
了概念階段,發(fā)展到了對(duì)各項(xiàng)技術(shù)的積極研究當(dāng)中。而其中的某些技術(shù),已經(jīng)成為科技公司和汽車企業(yè)都表示“必須拿下”的關(guān)鍵所在,比如激光雷達(dá)。激光雷達(dá)有多重要?顧名思義,激光雷達(dá)就是以發(fā)射激光束探測(cè)目標(biāo)的位置
2017-10-20 15:49:06
激光雷達(dá)、激光測(cè)距、脈沖測(cè)量必配芯片MS1003產(chǎn)品簡(jiǎn)述MS1003是一款高精度時(shí)間測(cè)量(TDC)電路,對(duì)比MS1002具有更高的精度和更小的封裝,適合于高精度小封裝的應(yīng)用領(lǐng)域。MS1003具有
2021-01-24 21:02:44
的時(shí)間差,然而我們都知道光速具有不變性,再將時(shí)間差乘以光速就可以得到目標(biāo)物體的距離。2.還有另一種全新的測(cè)量方法——三角測(cè)距法。像我們能聽(tīng)到的connect的體感攝像頭,還有Intel研發(fā)的RealSense都會(huì)使用到三角測(cè)距法。這種方式本質(zhì)上來(lái)說(shuō)是一種基于圖像處理的方法。
2017-09-19 15:51:15
認(rèn)為是 L3 級(jí)及以上自動(dòng)駕駛必備傳感器。激光雷達(dá)兼具測(cè)距遠(yuǎn)、角度 分辨率優(yōu)、受環(huán)境光照影響小的特點(diǎn),且無(wú)需深度學(xué)習(xí)算法,可直接獲得物體的距離和 方位信息。這些相較于其他傳感器的優(yōu)勢(shì),可顯著提升自動(dòng)駕駛
2021-03-18 11:14:17
定位。對(duì)于路徑規(guī)劃和運(yùn)動(dòng)控制,最終是結(jié)合車輛的 CAN 總線,對(duì)車進(jìn)行控制。在感知方面,我們普遍使用的是激光雷達(dá)、攝像頭、毫米波雷達(dá)三個(gè)是作為感知外界物體的傳感器。其中,激光雷達(dá)可以做物體的識(shí)別、分類
2017-09-08 17:24:48
環(huán)境光照的影響。從落地窗投射進(jìn)來(lái)的陽(yáng)光、各類室內(nèi)的人造光源甚至是直接暴露在室外工作,這些情況都有可能對(duì)于激光雷達(dá)產(chǎn)生干擾。這對(duì)于采用三角測(cè)距法原理的激光雷達(dá)來(lái)說(shuō)影響更加嚴(yán)重。因?yàn)樾枰軌騾^(qū)分出環(huán)境光和
2018-02-07 13:40:27
`最近突然對(duì)機(jī)器人距離探測(cè)設(shè)備感興趣就打算著手做個(gè)激光雷達(dá)玩玩。。。。可以在設(shè)計(jì)方案的時(shí)候發(fā)現(xiàn)角度信息很難解決。多以想看看大家有沒(méi)有做過(guò)這方面的。幫忙想下。。。。如果哪位土豪家里有掃地機(jī)器人可以拆下,,,,,給大家介紹下,,,哈哈哈。。。。哪位大神如果做過(guò),,,能不能幫幫偶。。。`
2016-04-16 17:45:28
和反射強(qiáng)度等信息,獲取地表的三維信息,并深入加工得到所需空間信息的技術(shù)。在軍民用領(lǐng)域都有廣泛的潛力和前景。機(jī)載激光雷達(dá)探測(cè)距離近,激光在大氣中傳輸時(shí),能量受大氣影響而衰減,激光雷達(dá)的作用距離在20千米以內(nèi)
2020-07-14 07:56:45
`1、激光雷達(dá)為什么這么貴?激光雷達(dá)是一個(gè)精密的光學(xué)儀器,需要專家級(jí)的工程師耗費(fèi)大量時(shí)間調(diào)試校正,并且調(diào)試校正的時(shí)間隨著雷達(dá)線束的增加,呈幾何級(jí)數(shù)增長(zhǎng)。所以產(chǎn)量非常低。價(jià)格自然就這么高了。“工業(yè)用品
2017-10-16 16:31:32
在很多人印象中激光雷達(dá)還是那個(gè)通過(guò)旋轉(zhuǎn)完成激光測(cè)距幫助機(jī)器人完成定位、建圖輔助后續(xù)導(dǎo)航的激光傳感器RPLIDAR定位建圖 但其實(shí),除了可以應(yīng)用在機(jī)器人定位建圖、自主導(dǎo)航、障礙物檢測(cè)與規(guī)避等領(lǐng)域外他
2018-05-11 15:33:44
機(jī)遇激光雷達(dá)在智能機(jī)器生態(tài)系統(tǒng)中有很多機(jī)遇。與使用二維圖像相比,點(diǎn)云能夠更容易的被計(jì)算機(jī)使用,用于構(gòu)建物理環(huán)境的三維形象——二維圖像是人腦最容易理解的數(shù)據(jù),而對(duì)于計(jì)算機(jī)來(lái)說(shuō),點(diǎn)云是最容易理解
2017-09-26 14:30:16
探測(cè)距離遠(yuǎn),且不易受外界環(huán)境的干擾,是最適合AGV小車SLAM定位和建圖的傳感器。 N301導(dǎo)航型激光雷達(dá) 鐳神智能的激光雷達(dá)探測(cè)距離遠(yuǎn),最遠(yuǎn)可達(dá)200米,測(cè)量精度高,可以很好的被用于地圖構(gòu)建,在
2018-11-09 15:59:01
有道友能介紹介紹EAI激光雷達(dá)嗎?
2020-12-31 17:48:20
FMCW激光雷達(dá)與dTOF激光雷達(dá)的區(qū)別在哪?
2021-07-23 13:22:37
(FMCW)直接檢測(cè)測(cè)距和調(diào)頻連續(xù)波相干測(cè)距
圖1.使用直接檢測(cè)的FMCW LIDAR OptiSystem模型示例視圖
1.測(cè)距(飛行時(shí)間)
1)原理簡(jiǎn)介
使用激光脈沖,飛行時(shí)間測(cè)距法測(cè)量發(fā)射脈沖從發(fā)射
2025-03-31 10:18:51
TOF 方案激光雷達(dá)是激光雷達(dá)新一代技術(shù)方案,本產(chǎn)品解決了如市場(chǎng)三角測(cè)試法等產(chǎn)品組裝問(wèn)題難,價(jià)格成本高等問(wèn)題,目前提供面陣及單光子技術(shù),基于COM產(chǎn)品。集成了SPAD,TDC,DSP,RAM
2019-06-07 00:03:35
STM32 Cube MX學(xué)習(xí)筆記——TOF 高速單線激光雷達(dá) L10_串口中斷通信1. TOF 高速單線激光雷達(dá) L102. STM32 Cube MX配置代碼配置1. TOF 高速單線激光雷達(dá)
2022-03-02 07:19:03
項(xiàng)目名稱:基于北醒TFmini-S 測(cè)距/避障激光雷達(dá)傳感器關(guān)鍵地區(qū)人員靠近防撞提醒裝置試用計(jì)劃:申請(qǐng)理由本人在嵌入式和電路領(lǐng)域有五年多的學(xué)習(xí)和開(kāi)發(fā)經(jīng)驗(yàn),曾設(shè)計(jì)過(guò)北斗和GPS定位救生裝置,對(duì)定位系統(tǒng)
2020-05-28 17:29:18
` 首先很榮幸能夠拿到北醒TFmini-S測(cè)距激光雷達(dá)的試用資格。剛開(kāi)始使用,只是簡(jiǎn)單的用上位機(jī)測(cè)試了一下,cm級(jí)的測(cè)試精度,測(cè)試效果非常不錯(cuò)。一、外觀形狀 收到快遞發(fā)現(xiàn)是非常小的盒子,打開(kāi)盒子后
2020-06-13 22:08:00
倒車雷達(dá)的核心原理是距離檢測(cè),距離檢測(cè)目前常用的有兩種方案,一種是通過(guò)激光進(jìn)行檢測(cè),原理上可分為TOF,也就是記錄發(fā)射激光和收到激光之間的時(shí)間間隔;第二是三角測(cè)距法,利用固定的激光發(fā)射角度,看反射
2024-01-09 09:51:09
表現(xiàn)出色。 除了深色物體檢出能力外,實(shí)際工作環(huán)境也會(huì)受到各類環(huán)境光照的影響。從落地窗投射進(jìn)來(lái)的陽(yáng)光、各類室內(nèi)的人造光源甚至是直接暴露在室外工作,這些情況都有可能對(duì)于激光雷達(dá)產(chǎn)生干擾。這對(duì)于采用三角測(cè)距法
2018-02-02 14:06:27
使用TOF測(cè)距法的長(zhǎng)距離測(cè)量。 詳情點(diǎn)擊:自動(dòng)駕駛激光雷達(dá)新型探測(cè)器——近紅外MPPC 然而,1550nm的人類視覺(jué)安全度更高,可以使用單脈沖更大輻射能量的激光——這是光波長(zhǎng)選擇的一個(gè)重要因素
2018-09-10 14:10:45
,雨霧的回波信號(hào)Echo1越強(qiáng),因此一般雨霧只會(huì)形成一次可以探測(cè)到的回波信號(hào),并非雨霧環(huán)境下全程都有回波信號(hào)。如下圖:搭建簡(jiǎn)易測(cè)試場(chǎng)景對(duì)多次回波技術(shù)的效果進(jìn)行驗(yàn)證,實(shí)驗(yàn)中使用三角架支撐TF03激光雷達(dá)
2020-09-24 14:17:56
線的固態(tài)激光雷達(dá)將在今年的第三季度進(jìn)入大規(guī)模的量產(chǎn)發(fā)貨階段。但即使還是在樣品階段,LR30的展出已經(jīng)體現(xiàn)了北醒對(duì)于產(chǎn)品應(yīng)用的細(xì)致考慮,本次CES展出的兩臺(tái)LR30,共同覆蓋了北醒展位前的全景以及
2018-01-25 09:38:47
的固態(tài)激光雷達(dá)將在今年的第三季度進(jìn)入大規(guī)模的量產(chǎn)發(fā)貨階段。但即使還是在樣品階段,LR30的展出已經(jīng)體現(xiàn)了北醒對(duì)于產(chǎn)品應(yīng)用的細(xì)致考慮,本次CES展出的兩臺(tái)LR30,共同覆蓋了北醒展位前的全景以及其他展位
2018-01-26 09:19:09
線的固態(tài)激光雷達(dá)將在今年的第三季度進(jìn)入大規(guī)模的量產(chǎn)發(fā)貨階段。但即使還是在樣品階段,LR30的展出已經(jīng)體現(xiàn)了北醒對(duì)于產(chǎn)品應(yīng)用的細(xì)致考慮,本次CES展出的兩臺(tái)LR30,共同覆蓋了北醒展位前的全景以及
2018-01-25 09:36:04
達(dá)22m的量程和更為穩(wěn)定的測(cè)距性能。 北醒結(jié)合創(chuàng)新的生產(chǎn)工藝和軟、硬件多項(xiàng)優(yōu)化,使得激光雷達(dá)真正達(dá)到了消費(fèi)級(jí),可應(yīng)用到更廣泛的領(lǐng)域。 ? 遠(yuǎn)、準(zhǔn)、穩(wěn) ? 最遠(yuǎn)測(cè)距可達(dá)22m, 高頻率的實(shí)時(shí)測(cè)量,具有
2018-01-04 10:21:23
`我們已經(jīng)對(duì)單線激光雷達(dá)司空見(jiàn)慣,其旋轉(zhuǎn)線掃的測(cè)量方式導(dǎo)致造成壽命問(wèn)題和價(jià)格居高不下。 因此,北醒研發(fā)了CE30,它是一款具有大視場(chǎng)角的固態(tài)激光雷達(dá)。它可同時(shí)輸出132°水平視場(chǎng)、9度垂直視場(chǎng)范圍內(nèi)
2018-01-04 10:18:39
線的固態(tài)激光雷達(dá)將在今年的第三季度進(jìn)入大規(guī)模的量產(chǎn)發(fā)貨階段。但即使還是在樣品階段,LR30的展出已經(jīng)體現(xiàn)了北醒對(duì)于產(chǎn)品應(yīng)用的細(xì)致考慮,本次CES展出的兩臺(tái)LR30,共同覆蓋了北醒展位前的全景以及
2018-01-25 09:41:33
激光測(cè)距原理是什么?如何實(shí)現(xiàn)激光脈沖測(cè)距雷達(dá)系統(tǒng)?
2021-04-29 06:14:35
1、概述由于課題要求,需要設(shè)計(jì)一款適合于果園應(yīng)用的激光雷達(dá)。因此采用單線掃描激光雷達(dá)和角度傳感器來(lái)設(shè)計(jì)能采集二維數(shù)據(jù)的激光雷達(dá)。關(guān)于數(shù)據(jù)的轉(zhuǎn)化的理論,我們可以查閱相關(guān)文獻(xiàn)。在此,只講基本的構(gòu)造和程序
2021-11-12 08:15:02
單線激光雷達(dá)特點(diǎn):結(jié)構(gòu)簡(jiǎn)單、掃描速度快、分辨率高、可靠性高、成本低。單線激光雷達(dá)實(shí)際上就是一個(gè)高同頻激光脈沖掃描儀,加上一個(gè)一維旋轉(zhuǎn)掃描。單線激光雷達(dá)雖然原理簡(jiǎn)單但是可以有效、高頻的測(cè)試物體的距離
2017-09-25 11:30:10
`TFmini是北醒在推進(jìn)激光雷達(dá)低成本化進(jìn)程中里程碑式的一步。 產(chǎn)品配以獨(dú)特的光學(xué)、結(jié)構(gòu)和電子設(shè)計(jì),使得產(chǎn)品具有低成本、小體積和低功耗三大優(yōu)點(diǎn)。 產(chǎn)品內(nèi)置室內(nèi)外各應(yīng)用環(huán)境的適配算法,可保證產(chǎn)品在
2018-01-04 10:22:39
移動(dòng)中的行人和人物海報(bào)、在三維立體的空間中建模、檢測(cè)靜態(tài)物體、精確測(cè)距。它是通過(guò)發(fā)射激光束來(lái)探測(cè)目標(biāo)位置、速度等特征量的雷達(dá)系統(tǒng),具有測(cè)量精度高、方向性好等優(yōu)點(diǎn), 在軍事領(lǐng)域以及民用的地理測(cè)繪等領(lǐng)域都有
2017-10-23 17:51:41
圖2:安防激光雷達(dá)、攝像頭、報(bào)警器多手段協(xié)同激光雷達(dá)+安防監(jiān)控優(yōu)勢(shì)近年來(lái),激光雷達(dá)技術(shù)飛速發(fā)展,從簡(jiǎn)單的激光測(cè)距技術(shù),逐步發(fā)展出激光跟蹤、激光測(cè)速、激光掃描成像、激光多普勒成像等技術(shù)。其工作環(huán)境也從
2020-02-29 17:03:44
問(wèn)題,就是:給了機(jī)器人一雙“眼睛”。 通過(guò)激光雷達(dá),機(jī)器人可以向外界發(fā)射紅外線光源,通過(guò)三角測(cè)距或者TOF成像原理對(duì)機(jī)器人進(jìn)行定位,幫助機(jī)器人構(gòu)建所在環(huán)境的高精度輪廓信息,輔助機(jī)器人。 通過(guò)觀察這對(duì)CP
2019-02-15 15:12:28
、緊急剎車、車距保持等功能。 綜述根據(jù)上面的介紹進(jìn)行簡(jiǎn)單的總結(jié),三種雷達(dá)各自的特點(diǎn)及優(yōu)劣勢(shì)如下: 制式參數(shù)超聲波雷達(dá) 激光雷達(dá)毫米波雷達(dá) 最大距離近遠(yuǎn)較遠(yuǎn)距離、角度分辨率一般 很高 高環(huán)境適應(yīng)性易受
2019-09-19 09:05:02
,每一種傳感器都有獨(dú)特的優(yōu)勢(shì)和弱點(diǎn)。例如,毫米波雷達(dá)可在低分辨率情況下完成測(cè)距,且受天氣因素影響小;而攝像頭有更高的分辨率,能夠感知顏色,但受強(qiáng)光影響較大;激光雷達(dá)則能夠提供三維尺度感知信息,對(duì)環(huán)境的重構(gòu)
2017-09-06 11:36:58
激光雷達(dá)仍各有其弊端:機(jī)械旋轉(zhuǎn)式單線雷達(dá)無(wú)法探測(cè)低矮障礙物,穩(wěn)定性受旋轉(zhuǎn)部件影響,同時(shí)工業(yè)市場(chǎng)長(zhǎng)期被國(guó)外激光雷達(dá)品牌把控,成本居高不下;多點(diǎn)(7-11點(diǎn))拼接式雷達(dá),角分辨率低,無(wú)法精準(zhǔn)定位障礙物方向。北
2017-12-07 14:47:45
模式,適合于激光雷達(dá)和激光測(cè)距。主要特點(diǎn) ? 雙通道單精度模式 46ps ? 單通道雙精度模式 23ps ? 非校準(zhǔn)測(cè)量范圍 3.5ns(0ns)至 16μs ? 校準(zhǔn)測(cè)量范圍 3.5ns(0ns)至
2021-07-15 19:40:49
iphone12這個(gè)亮點(diǎn)不在5G上面,畢竟國(guó)內(nèi)的一些廠商早就已配備,也不在顏色,重點(diǎn)在于配備了一顆激光雷達(dá)!先說(shuō)一下這個(gè)激光雷達(dá)帶來(lái)的用途,最直接的就是能夠快速精準(zhǔn)對(duì)焦,即使在晚上也能夠很好實(shí)現(xiàn)
2021-07-22 09:12:51
空間激光雷達(dá)最小接收光功率的計(jì)算【摘要】采用信號(hào)檢測(cè)的統(tǒng)計(jì)思想,在詳細(xì)分析雷達(dá)接收機(jī)各種噪聲大小與概率分布、計(jì)算空間背景光大小和光譜特性的前提下,基于信號(hào)檢測(cè)理論中的虛警概率和發(fā)現(xiàn)概率提出了一種能
2009-05-15 01:20:13
自制低成本3D激光掃描測(cè)距儀(3D激光雷達(dá))
2021-03-04 10:51:54
自制低成本3d激光掃描測(cè)距儀激光雷達(dá)
2020-05-27 16:23:12
image sensor在幾百個(gè)點(diǎn)左右),三角測(cè)距速度居中,每秒在幾百個(gè)到幾千個(gè)點(diǎn),脈沖測(cè)距法的測(cè)量速度最快,為每秒幾萬(wàn)到幾十萬(wàn)個(gè)點(diǎn)。因此,激光雷達(dá)一般采用三角測(cè)距法和脈沖測(cè)距法。而短距離激光雷達(dá)
2018-09-10 14:21:58
周圍障礙物的距離,誤差僅為毫米級(jí)。商場(chǎng)導(dǎo)引導(dǎo)購(gòu)機(jī)器人這是目前在商場(chǎng)里經(jīng)常能看到的服務(wù)型機(jī)器人。該產(chǎn)品采用360度激光雷達(dá)掃描測(cè)距傳感器,可實(shí)現(xiàn)機(jī)器人自主同步建圖及定位導(dǎo)航,適用于室內(nèi)陪護(hù)、酒店前臺(tái)、商場(chǎng)
2018-09-10 16:32:46
請(qǐng)問(wèn)激光雷達(dá)和激光掃描儀的具體區(qū)別在哪兒?
2022-05-13 11:05:19
激光雷達(dá)是如何產(chǎn)生的?激光雷達(dá)在自動(dòng)駕駛領(lǐng)域有什么作用?
2021-06-17 07:31:54
,價(jià)格要比激光雷達(dá)便宜,但由于探測(cè)精度的限制,對(duì)于工程師而言,毫米波雷達(dá)只能應(yīng)用于簡(jiǎn)單的場(chǎng)景中。 激光雷達(dá)的探測(cè)距離比攝像頭遠(yuǎn),能夠準(zhǔn)確的獲取物體的三維信息,而且探測(cè)到的數(shù)據(jù)量遠(yuǎn)超過(guò)毫米波雷達(dá),魯棒性
2017-08-21 14:54:32
`歷經(jīng)40余年的發(fā)展,激光雷達(dá)技術(shù)已從最初的激光測(cè)距技術(shù),逐步發(fā)展了激光跟蹤、激光測(cè)速、激光掃描成像、激光多普勒成像等技術(shù),因此出現(xiàn)了各種不同種類的激光雷達(dá),被廣泛應(yīng)用于各個(gè)領(lǐng)域,激光雷達(dá)在很多
2018-12-10 14:55:39
請(qǐng)問(wèn)各位大咖,激光雷達(dá)的測(cè)量距離能到多少?
2022-10-05 03:18:49
經(jīng)緯恒潤(rùn)激光雷達(dá)集成系統(tǒng)(Integrated LiDAR System)搭載了激光雷達(dá)折疊收納機(jī)構(gòu)和綜合清洗系統(tǒng)
2024-11-28 11:25:29
【摘 要】 敘述了激光三角法測(cè)厚的原理,對(duì)板材在線測(cè)厚系統(tǒng)進(jìn)行了硬件設(shè)計(jì)和軟件設(shè)計(jì)并給出了系統(tǒng)測(cè)量指標(biāo)。
2009-05-16 19:47:283158 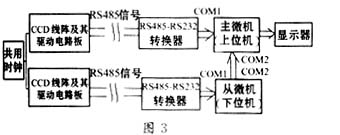
激光三角法測(cè)距傳器的
2011-01-07 17:24:14 99
99 一種大范圍激光三角測(cè)距傳感器的標(biāo)定方法,下來(lái)看看
2017-01-02 19:33:2812 激光雷達(dá)最早的定義是 LIDAR,英文為 Light Deteation and Ranging,中文意思是「光的探測(cè)和測(cè)距」。 其實(shí)更準(zhǔn)確的一個(gè)定義是 LADAR:LAser Detection
2017-09-24 09:52:1243 載波的雷達(dá)。激光雷達(dá)以激光作為載波.可以用振幅、頻率、相位和振幅來(lái)搭載信息,作為信息載體。 激光雷達(dá)利用激光光波來(lái)完成上述任務(wù)。可以采用非相干的能量接收方式,這主要是一脈沖計(jì)數(shù)為基礎(chǔ)的測(cè)距雷達(dá)。
2018-02-20 09:48:0011874 MEMS微鏡已經(jīng)存在多年,甚至在視頻投影機(jī)這樣的日常設(shè)備中得到了應(yīng)用。當(dāng)今MEMS微鏡的問(wèn)題在于很難將其用于遠(yuǎn)距離激光雷達(dá)。遠(yuǎn)距離探測(cè)和大視場(chǎng)角是激光雷達(dá)的關(guān)鍵性能指標(biāo)。典型的MEMS微鏡的鏡面尺寸小,偏轉(zhuǎn)角度較小,因此無(wú)法達(dá)到理想的探測(cè)距離和視場(chǎng)角。
2019-04-16 11:33:4415542 集成,以飛行平臺(tái)為載體,通過(guò)對(duì)地面進(jìn)行掃描,記錄目標(biāo)的姿態(tài)、位置和反射強(qiáng)度等信息,獲取地表的三維信息,并深入加工得到所需空間信息的技術(shù)。在軍民用領(lǐng)域都有廣泛的潛力和前景。機(jī)載激光雷達(dá)探測(cè)距離近,激光
2019-08-13 14:09:413781 激光測(cè)距傳感器技術(shù)按照測(cè)程分為絕對(duì)距離測(cè)量法和微位移測(cè)量法。按照測(cè)距方法細(xì)分,絕對(duì)距離測(cè)距法主要脈沖式激光測(cè)距和相位式激光測(cè)距,微位移測(cè)量法主要有三角法激光測(cè)距和干涉法激光測(cè)距。
2019-09-26 09:02:124165 TOF激光雷達(dá)是一種進(jìn)行光飛行的時(shí)間的測(cè)量方法,顧名思義就是發(fā)射出一道激光,然后會(huì)有一種二極管來(lái)進(jìn)行激光的回波檢測(cè),再使用一個(gè)很高精度的計(jì)時(shí)器去測(cè)量光波發(fā)射到目標(biāo)物引起反饋再回來(lái)的時(shí)間差,而光速具有不變性,再將時(shí)間差乘以光速便可得到目標(biāo)物體的距離。
2020-06-03 16:55:1610737 就像大家所熟知的那樣,路程=速度×?xí)r間,激光雷達(dá)的測(cè)距過(guò)程也離不開(kāi)這個(gè)公式。在空間中,激光的飛行速度是已知的3×108 m/s。現(xiàn)有的激光雷達(dá)測(cè)距方法有很多種,除了直接測(cè)量激光脈沖飛行時(shí)間的方式,還可以通過(guò)對(duì)發(fā)射激光信號(hào)的幅度、頻率等參數(shù)進(jìn)行調(diào)制來(lái)間接的獲取目標(biāo)的距離信息。
2020-09-02 16:56:2924003 ”激光雷達(dá)進(jìn)入前裝車廠,是大多數(shù)激光雷達(dá)公司的目標(biāo)。但是,路徑有很多種。北醒選擇先讓激光雷達(dá)的測(cè)距模組登陸汽車前裝市場(chǎng)。讓產(chǎn)品在大規(guī)模量產(chǎn)中反復(fù)打磨,再促進(jìn)包含測(cè)角功能的3D激光雷達(dá)整體的成熟
2020-10-09 15:27:063248 如今,激光雷達(dá)已被廣泛應(yīng)用于機(jī)器人、無(wú)人駕駛、AR/VR、3D打印等多個(gè)領(lǐng)域,根據(jù)應(yīng)用領(lǐng)域的不同,激光雷達(dá)的類型也存在一定差異,機(jī)器人是目前激光雷達(dá)應(yīng)用最為火熱的領(lǐng)域之一,按照不同的技術(shù)路線,可將機(jī)器人激光雷達(dá)分為TOF激光雷達(dá)及三角測(cè)距激光雷達(dá)兩大類型。
2020-12-26 09:27:154690 目前市場(chǎng)上機(jī)械式激光雷達(dá)使用了不同的測(cè)距原理,主要可分為三角測(cè)距和ToF測(cè)距兩類,使得雷達(dá)整體設(shè)計(jì)在尺寸、性能和成本上有較大差異。 接下來(lái)將為大家詳細(xì)介紹兩類測(cè)距方式的技術(shù)原理,幫助研發(fā)人員加深理解,從而選擇更適
2021-04-09 11:10:368306 
的三維信息,并且具有良好的指向性,抗干擾性強(qiáng),測(cè)距精度高。 直接表現(xiàn)激光雷達(dá)系統(tǒng)測(cè)距性能的是其中系統(tǒng)級(jí)指標(biāo),測(cè)距能力反映在指標(biāo)上表現(xiàn)為max測(cè)程與測(cè)距精度。保證系統(tǒng)的發(fā)射機(jī)指標(biāo)與接收機(jī)指標(biāo)為保證測(cè)距系統(tǒng)的性能提供了基礎(chǔ)
2021-10-08 09:44:397549 
的交互。 在三維重建中,主流的方式有視覺(jué)和激光雷達(dá)兩種。視覺(jué)技術(shù)的測(cè)距方法是基于三角的測(cè)距法,最大范圍是 5-8m,并不適用于較大的空間,且這種方法受光線的影響很大。相比之下,激光雷達(dá)可以用于的場(chǎng)景更為廣泛。 1.2 應(yīng)用領(lǐng)域
2021-11-16 14:59:427448 
激光雷達(dá)主要是由激光發(fā)射器、接收器、處理器以及激光操控模組這四個(gè)模塊構(gòu)成。使用激光雷達(dá)測(cè)距,多用飛行時(shí)間法(TOF)。
2022-02-22 09:18:573249 激光雷達(dá)是什么? 激光雷達(dá)(英文:Lidar),激光雷達(dá)是集激光、全球定位系統(tǒng)(GPS)、和IMU(慣性測(cè)量裝置)三種技術(shù)于一身的系統(tǒng),相比普通雷達(dá),激光雷達(dá)具有分辨率高,隱蔽性好、抗干擾能力更強(qiáng)等
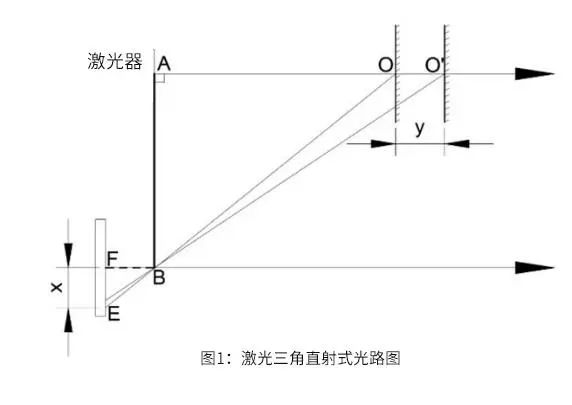
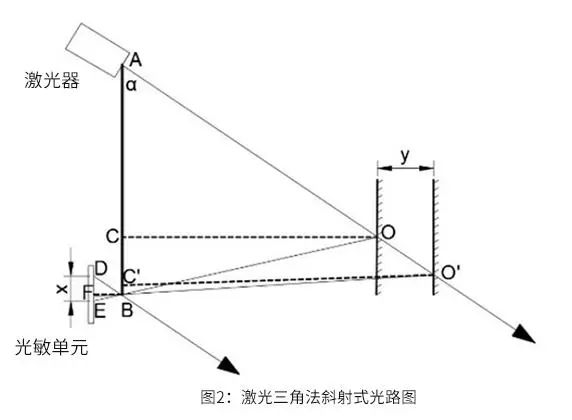
2022-06-20 16:53:4125989 三角測(cè)距是什么意思?三角測(cè)距原理圖解 三角測(cè)距是什么意思? 三角測(cè)距法是一種低成本的激光雷達(dá)測(cè)距方案,三角測(cè)距是利用激光這把尺子,根據(jù)各種參數(shù)設(shè)定和距離分辨率;以及測(cè)量策略的不同,來(lái)測(cè)定距離。 三角
2022-06-21 17:33:4841563 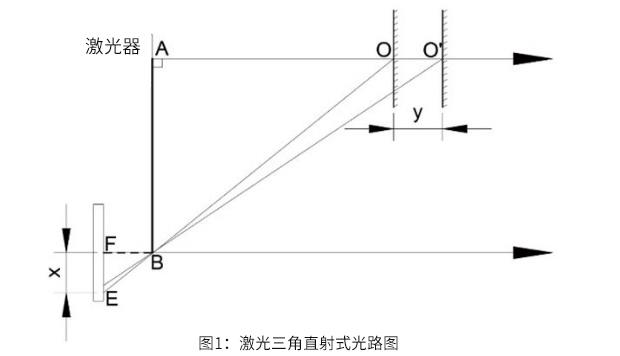
從原理上來(lái)說(shuō),三角測(cè)距的目標(biāo)物體距離越遠(yuǎn),在CCD上的位置差別就越小,以致于在超過(guò)某個(gè)距離后,CCD幾乎無(wú)法分辨,而TOF激光雷達(dá)采用脈沖激光采樣,并且還能嚴(yán)格控制視場(chǎng)以減少環(huán)境光的影響,可以測(cè)量的距離更遠(yuǎn)。
2022-07-05 14:23:5710701 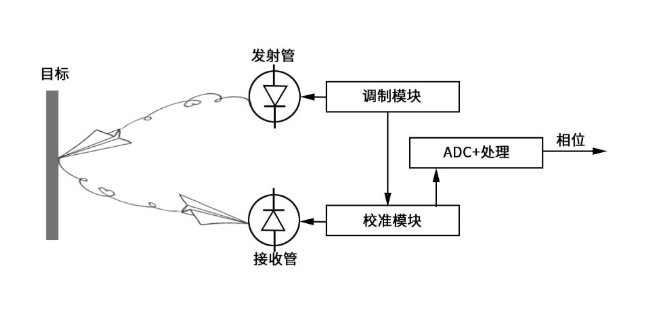
,TOF激光雷達(dá)的半固態(tài)設(shè)計(jì)可以避免三角法雷達(dá)在防塵防水方面比較脆弱的問(wèn)題,有更優(yōu)秀的防護(hù)效果,工作壽命也更長(zhǎng)。
2022-07-12 13:56:072402 
AMCW(調(diào)幅連續(xù)波)測(cè)距法 AMCW通過(guò)將光波的強(qiáng)度進(jìn)行調(diào)制(如正弦波或三角波等),使光波在投射到物體后返回探測(cè)器的過(guò)程中在光強(qiáng)波形上形成一個(gè)相位差,那么通過(guò)測(cè)量相位差,就可以間接獲取光的飛行時(shí)間,從而反推飛行距離。
2022-07-27 16:22:4215381 激光雷達(dá)的本質(zhì)是一種以激光為輻射源的主動(dòng)探測(cè)器,通過(guò)測(cè)距和測(cè)角來(lái)實(shí)現(xiàn)探測(cè)目的。激光雷達(dá)LiDAR(Light Detection and Ranging)是激光探測(cè)及測(cè)距系統(tǒng)的簡(jiǎn)稱,另外也稱 LADAR(Laser Detection and Ranging)。
2022-10-27 11:53:2012283 通常激光雷達(dá)可以分為兩大類:機(jī)械式激光雷達(dá)和固態(tài)激光雷達(dá)。機(jī)械式激光雷達(dá)采用機(jī)械旋轉(zhuǎn)部件作為光束掃描的實(shí)現(xiàn)方式,可以實(shí)現(xiàn)大角度掃描,但是裝配困難、掃描頻率低。
2023-02-21 11:18:555197 激光雷達(dá)即激光探測(cè)及測(cè)距系統(tǒng),是通過(guò)發(fā)射激光束來(lái)探測(cè)目標(biāo)位置、速度等特征量的雷達(dá)系統(tǒng)。按掃描維度,激光雷達(dá)可分為一維激光雷達(dá)、二維激光雷達(dá)和三維激光雷達(dá)。
2023-05-10 09:58:3310062 
深圳市不止技術(shù)有限公司是激光雷達(dá)行業(yè)頭部知名企業(yè),團(tuán)隊(duì)自2016年底就開(kāi)始了多款激光雷達(dá)方案的研發(fā),并創(chuàng)造了30多件發(fā)明專利,我們作為激光雷達(dá)行業(yè)5年多的資深老兵,對(duì)激光雷達(dá)有著深厚的技術(shù)積累
2022-02-24 12:50:108819 
激光雷達(dá)根據(jù)原理可以分為TOF(飛行時(shí)間),三角法測(cè)距和相位測(cè)距三種方式。 三角法測(cè)距為 三角測(cè)距法是利用相似三角形本地可以測(cè)得透鏡中心和照射到CMOS/CCD上的距離,就可以得到物距,本地的分辨率
2023-07-08 09:40:228601 
激光雷達(dá)在自動(dòng)駕駛應(yīng)用中主要用來(lái)探測(cè)道路上的障礙物信息,把數(shù)據(jù)和信號(hào)傳遞給自動(dòng)駕駛的大腦,再做出相應(yīng)的駕駛動(dòng)作,但室外常見(jiàn)的干擾因素如雨、霧、雪、粉塵、高低溫等對(duì)激光雷達(dá)的識(shí)別造成了極大的影響。因此
2023-07-14 11:11:305800 簡(jiǎn)述激光雷達(dá)的結(jié)構(gòu)原理分類及特點(diǎn) TIM320激光雷達(dá)的工作原理? 激光雷達(dá)是一種高精度的探測(cè)裝置,可以在三維空間中進(jìn)行高精度的距離測(cè)量和空間信息采集。激光雷達(dá)的主要結(jié)構(gòu)包括光源、掃描系統(tǒng)、接收系統(tǒng)
2023-08-22 16:45:304493 激光雷達(dá)的基本構(gòu)成 激光雷達(dá)前景分析 激光雷達(dá)基本構(gòu)成 激光雷達(dá)是利用激光信號(hào)進(jìn)行測(cè)距的設(shè)備,其基本構(gòu)成包括激光器、掃描機(jī)構(gòu)、接收器、信號(hào)處理單元和數(shù)據(jù)輸出單元。 (1)激光器:激光雷達(dá)的核心部件
2023-08-23 16:28:084661 單線激光雷達(dá)和多線激光雷達(dá)區(qū)別? 單線激光雷達(dá)和多線激光雷達(dá)是兩種常用的激光雷達(dá)技術(shù)。它們?cè)?b class="flag-6" style="color: red">激光的發(fā)射方式、數(shù)據(jù)采集、成像分辨率和應(yīng)用場(chǎng)景等方面存在著很大的區(qū)別。 首先,單線激光雷達(dá)是指激光雷達(dá)只
2023-12-07 15:48:336715 硅基光電子技術(shù)的發(fā)展可以將激光雷達(dá)系統(tǒng)發(fā)射模塊和接收模塊中分立的有源和無(wú)源器件集成在芯片上,使激光雷達(dá)體積更小、穩(wěn)定性更強(qiáng)、成本更低,推動(dòng)激光雷達(dá)在自動(dòng)駕駛等領(lǐng)域的應(yīng)用。
2024-04-08 10:23:291789 
。市面上的雷達(dá)產(chǎn)品種類也非常豐富,那么如何才能選出真正適合自己需求的激光雷達(dá)呢?本期小明就來(lái)給大家說(shuō)道說(shuō)道~工作原理激光雷達(dá)的工作原理主要有飛行時(shí)間法(TOF)和三角法
2024-05-28 08:24:472033 
? 1.什么是激光雷達(dá) 激光雷達(dá)LiDAR的全稱為L(zhǎng)ight Detection and Ranging 激光探測(cè)和測(cè)距。 激光雷達(dá)的工作原理:對(duì)紅外光束Light Pluses發(fā)射、反射和接收
2025-04-25 11:48:582374 
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論