周圍環(huán)境的 3D 模型。LiDAR?系統(tǒng)捕獲的圖像中的每個(gè)像素都將具有與其關(guān)聯(lián)的深度。這允許更好地識(shí)別對象并消除可能存在于僅由圖像傳感器獲得的 2D 圖像中的任何歧義。 LiDAR如何?構(gòu)建 3D 點(diǎn)云?LiDAR?通常使用直接飛行時(shí)間 (dToF) 技術(shù)來測量與
2021-06-21 11:55:08 8658
8658 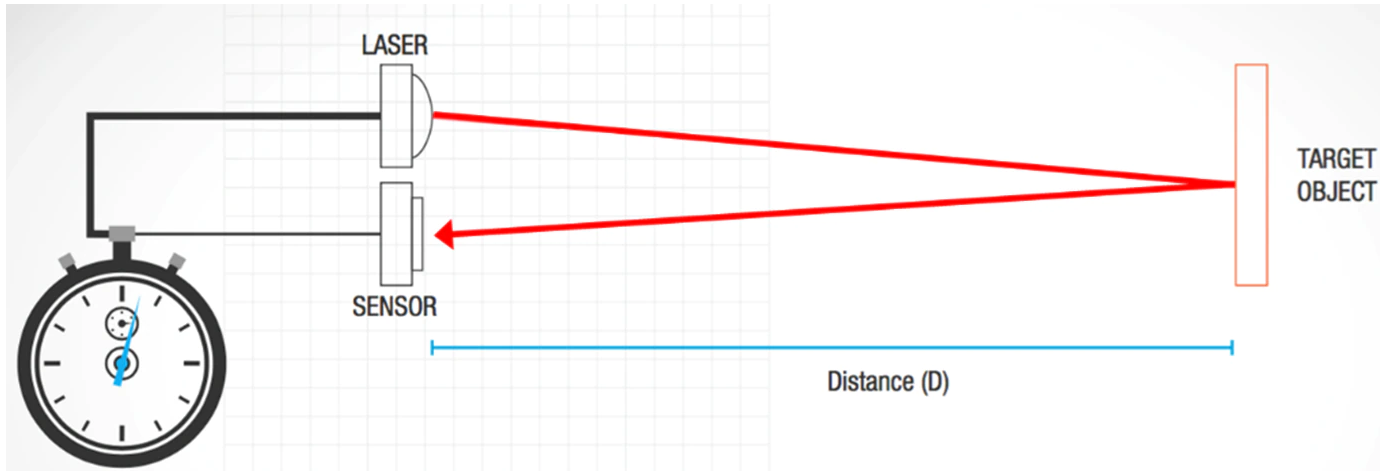
的3D模型。LiDAR 系統(tǒng)捕獲的圖像中的每個(gè)像素都將具有與之關(guān)聯(lián)的深度。這樣可以更好地識(shí)別物體,并消除僅采用圖像傳感器獲得的2D圖像中可能存在的模糊。 LiDAR如何構(gòu)建3D點(diǎn)云? LiDAR 通常使用直接飛行時(shí)間(dToF)技術(shù)來測量到物體的距離。短的
2021-04-06 12:00:085045 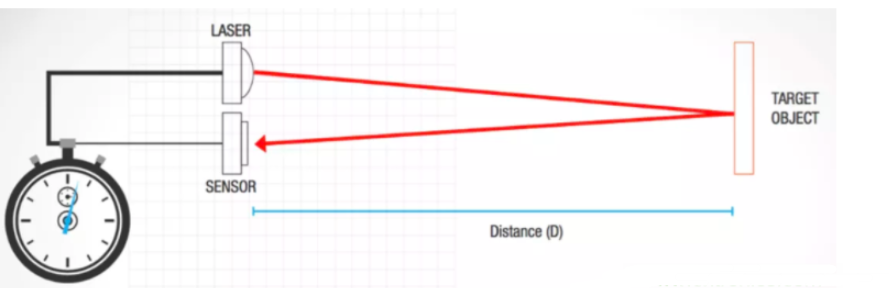
基于深度學(xué)習(xí)的三維點(diǎn)云配準(zhǔn)方法成為研究的主流,并隨之誕生了DeepVCP、DGR、Predator等著名的方法。
2022-11-29 11:41:242398 實(shí)現(xiàn)圖像與其重建對象之間的精確2D-3D對應(yīng)關(guān)系對于準(zhǔn)確的圖像定位至關(guān)重要,一種有前景的方法涉及在圖像和激光雷達(dá)平面之間建立對應(yīng)關(guān)系,激光雷達(dá)平面可以被視為來自激光雷達(dá)點(diǎn)云地圖的重建對象的替代3D特征。
2023-12-12 14:46:391841 對于自動(dòng)駕駛應(yīng)用來說,3D 場景感知至關(guān)重要。3D點(diǎn)云數(shù)據(jù)就是具有3D特征的數(shù)據(jù)。一方面,3D 點(diǎn)云可以直接用來獲取障礙物的距離和大小,以及場景的語義信息。
2023-12-28 16:35:222712 
背景部分介紹了3D點(diǎn)云應(yīng)用領(lǐng)域中公開可訪問的數(shù)據(jù)集的重要性,這些數(shù)據(jù)集對于分析和比較各種模型至關(guān)重要。研究人員專門設(shè)計(jì)了各種數(shù)據(jù)集,包括用于3D形狀分類、3D物體檢測和3D點(diǎn)云分割等任務(wù)的數(shù)據(jù)集。
2024-02-22 16:16:472454 
轉(zhuǎn)3D模塊圖32D轉(zhuǎn)3D原理 3.2.1 關(guān)鍵技術(shù) 2D轉(zhuǎn)3D也可以說是二維+深度信息:即在傳統(tǒng)的二維圖像旁邊添加一個(gè)z軸圖像。z軸圖像采用8位灰度編碼(256級(jí)),分辨率與左側(cè)二維圖像相同。圖像
2011-07-11 18:05:22
的2D waveform(如紅色線所示)可以畫出固定X值YZ的圖--這里應(yīng)該是waveform的形式?(青色線所示)還有就是如果哦兩個(gè)cursor, 放在不同的X值上如果想對這一段積分應(yīng)該怎么做?新手,對此完全沒有什么想法希望能給一點(diǎn)建議如何入手謝謝`
2012-09-25 08:12:46
什么是3D圖形芯片?3D圖像生成算法的原理是什么?
2021-06-04 06:29:06
你好! 現(xiàn)在我有個(gè)問題想請教大家, 我怎么做一個(gè)3D圖像的渦輪扇葉然后通過控制器調(diào)整它的速度然后再3D圖像中開始轉(zhuǎn)并且根據(jù)控制量改變在3D圖像中轉(zhuǎn)的快慢?怎么在3D圖像中仿真水平面 并且有相應(yīng)的變化!希望大家能給我有任何指教!
2016-11-30 23:25:31
完成后,2D圖如下: 2D圖 我們按下鍵盤上的數(shù)字3,即可查看繪制的3D模型了,如圖(4)。 圖(4)0805電阻3D圖像 0805的3D繪制起來比較簡單,使用AD繪制的3D模型也不是
2021-01-14 16:48:53
Ansys Maxwell 3D 2D RMxprt v16.0 Win32-U\RMxprt 軟件可提高旋轉(zhuǎn)電機(jī)的設(shè)計(jì)和優(yōu)化速度。用戶通過軟件可以很簡單地利用電機(jī)參數(shù)及模板驅(qū)動(dòng)型用戶界面對電機(jī)建模
2014-06-13 17:09:22
根本無法打開它們。錯(cuò)誤消息是我的顯卡不支持webgl。問題:由于這是一張舊卡,有沒有更新的顯卡我可以替換它?我確實(shí)將我和我的女朋友進(jìn)行了比較,并注意到我的不支持2D和3D,而她的確如此,她對游戲沒有
2018-11-21 11:47:16
的瓶頸。為這兩個(gè)OpenCV函數(shù)創(chuàng)建一個(gè)覆蓋層也是這個(gè)項(xiàng)目未來工作的一部分。 4.3D到2D投影 生成投影2D圖像的方法首先從生成的3D密集點(diǎn)云開始。3D點(diǎn)云可以視為有關(guān)模型的所有必需信息。它包含
2021-01-07 17:25:42
我們所說的局部摩擦是指給液晶盒中不同區(qū)域(可自定義區(qū)域)進(jìn)行不同的液晶配向,所以也可以稱之為局部掩膜、局部配向等。TechWiz LCD 2D和TechWiz LCD 3D都可以對液晶盒設(shè)置局部摩擦
2025-01-03 08:58:53
我們所說的局部摩擦是指給液晶盒中不同區(qū)域(可自定義區(qū)域)進(jìn)行不同的液晶配向,所以也可以稱之為局部掩膜、局部配向等。TechWiz LCD 2D和TechWiz LCD 3D都可以對液晶盒設(shè)置局部摩擦
2025-02-08 08:52:55
我們所說的局部摩擦是指給液晶盒中不同區(qū)域(可自定義區(qū)域)進(jìn)行不同的液晶配向,所以也可以稱之為局部掩膜、局部配向等。TechWiz LCD 2D和TechWiz LCD 3D都可以對液晶盒設(shè)置局部摩擦
2025-06-16 08:46:58
答:1)執(zhí)行菜單命令“視圖→切換到3維模式”即可切換到3D模式2)執(zhí)行菜單命令“視圖→切換到2維模式”即可切換到2D模式3)也可以執(zhí)行字母鍵盤上的數(shù)字“2”或“3”進(jìn)行“2維”或者“3維”模式之間切換 圖4-15 基準(zhǔn)坐標(biāo)設(shè)置圖4-16 切換3D模式
2021-09-13 14:13:37
AD17.1.5軟件,3D與2D模型不能相互轉(zhuǎn)換,按3可以進(jìn)入3D模型,按2不可以進(jìn)入2D模型,這個(gè)是怎么回事啊?
2019-09-20 05:35:16
測量金屬制品的長度、寬度、高度等維度參數(shù)。
除了測量金屬表面的形狀和輪廓外,光學(xué)3D表面輪廓儀還可以生成三維點(diǎn)云數(shù)據(jù)和色彩圖像,用于進(jìn)一步分析和展示:
1、三維點(diǎn)云數(shù)據(jù)可以用于進(jìn)行CAD模型比對、工藝
2023-08-21 13:41:46
例如攝影機(jī)拍攝3張圖,利用第一張和第三張構(gòu)建出3D結(jié)構(gòu),測試第二張圖中的特征距離該3D模型中心的距離!
2014-10-08 22:21:02
當(dāng)中常規(guī)人工檢測手段檢測效率低、漏檢率高的問題,能大幅度提高生產(chǎn)效率,更好地控制生產(chǎn)質(zhì)量,節(jié)約大量的檢測勞動(dòng)力與人力成本。創(chuàng)新點(diǎn)一:使用3d圖像深度信息,結(jié)合2d圖像處理,與被測對象聯(lián)合組成一一對應(yīng)
2022-03-08 13:59:00
本文介紹的三個(gè)應(yīng)用案例展示了業(yè)界上先進(jìn)的機(jī)器視覺軟件和及其圖像預(yù)處理技術(shù)如何促使2D和3D視覺檢測的性能成倍提升。
2021-02-22 06:56:21
如何同時(shí)獲取2d圖像序列和相應(yīng)的3d點(diǎn)云?以上來自于谷歌翻譯以下為原文How to obtain the sequence of 2d image and corresponding 3d point cloud at the same time?
2018-11-13 11:25:01
請問PCB 中2D 庫中怎么導(dǎo)出3D
2019-09-11 22:17:15
In many cases, there is a complementary choice of automated 3D X-ray and off-axis 2D X-ray
2019-10-28 06:18:12
請問怎么將AD中的3D封裝庫轉(zhuǎn)換為2D的封裝庫
2019-06-05 00:35:07
全球領(lǐng)先的整合單片機(jī)、混合信號(hào)、模擬器件和閃存專利解決方案的供應(yīng)商——Microchip Technology Inc.(美國微芯科技公司)日前宣布推出2D/3D觸摸與手勢開發(fā)工具
2018-11-07 10:45:56
基于角點(diǎn)的紅外與可見光圖像自動(dòng)配準(zhǔn)方法摘要:針對紅外圖像與可見光圖像的自動(dòng)配準(zhǔn)問題,提出了一種基于圖像角點(diǎn)特征以及仿射變換模型的方法.利用Ha
2010-05-12 09:11:55 29
29 3D圖像引擎,3D圖像引擎原理
產(chǎn)生的背景和定義 隨著計(jì)算機(jī)軟、硬件突飛猛進(jìn)的發(fā)展,計(jì)算機(jī)圖形學(xué)在各個(gè)行業(yè)的應(yīng)用也得
2010-03-26 15:54:071633 Dialog半導(dǎo)體推出首款2D到3D視頻轉(zhuǎn)換芯片,為智能手機(jī)和平板電腦帶來3D體驗(yàn)
低功耗3D技術(shù)實(shí)現(xiàn)了各種便攜設(shè)備瞬間體驗(yàn)無限量的3D內(nèi)容
2010-12-13 15:08:141055 Dialog半導(dǎo)體股份有限公司日前宣布推出全球首款2D/3D影像轉(zhuǎn)換實(shí)時(shí)處理芯片:DA8223.該芯片為包括智能手機(jī)和平板電腦等在內(nèi)的各種便攜式設(shè)備提供了2D/3D視頻影像實(shí)時(shí)轉(zhuǎn)換處理
2010-12-14 09:17:385637 ;x>nkedIn上發(fā)表了一篇跟澳大利亞科技公司優(yōu)立(Euclideon)所使用的點(diǎn)云數(shù)據(jù)有關(guān)的文章,并在業(yè)內(nèi)引起了一番討論。 1. 點(diǎn)云的問題 點(diǎn)云是由3D掃描硬件收集的數(shù)據(jù),如FARO的Focus 3D激光掃描儀和Shining 3D的Einscan Pro。捕獲3D對象的基本原理是3D掃描儀反饋光
2017-09-15 09:28:0520 3D打印原理:分層打印(2D)與層疊堆砌(3D), 3D打印(3DP)即快速成型技術(shù)的一種,它是一種以數(shù)字模型文件為基礎(chǔ),運(yùn)用粉末狀金屬或塑料等可粘合材料,通過逐層打印的方式來構(gòu)造物體的技術(shù)。
2017-09-23 10:19:5921 1. 點(diǎn)云的問題 點(diǎn)云是由3D掃描硬件收集的數(shù)據(jù),如FARO的Focus 3D激光掃描儀和Shining 3D的Einscan Pro。捕獲3D對象的基本原理是3D掃描儀反饋光束接觸表面時(shí)的單個(gè)點(diǎn)
2017-09-27 15:27:2517 的廠商競爭,以及日經(jīng)貼般的MLC/TLC顆粒的優(yōu)劣問題。、 那么,到底什么是閃存顆?2D NAND和3D NAND之間又有哪些區(qū)別和聯(lián)系? 閃存顆粒到底是什么? 閃存顆粒,又稱閃存,是一種非易失性存儲(chǔ)器,即在斷電的情況下依舊可以保存已經(jīng)寫入的數(shù)據(jù)
2017-10-13 20:33:266 近幾年,惠普、卡西歐、佳能、柯達(dá)等打印機(jī)和照相機(jī)龍頭企業(yè)不約而同轉(zhuǎn)戰(zhàn)3D打印市場。2D巨頭們剛一入局便頻出大手筆,在新領(lǐng)域風(fēng)生水起。可以預(yù)見,這些實(shí)力強(qiáng)勁的3D打印新玩家將與增材制造老品牌展開長期的較量與博弈,產(chǎn)業(yè)與消費(fèi)者都會(huì)從中獲益。
2017-11-13 15:27:331687 SIFT特征點(diǎn)提取過程,提出了一種多尺度角點(diǎn)提取方法,提取的多尺度角點(diǎn)對圖像旋轉(zhuǎn)和尺度變化有很好的適用性。并用SIFT描述子描述,用光學(xué)及SAR圖像進(jìn)行了配準(zhǔn)實(shí)驗(yàn)。結(jié)果表明,與SIFT、Harris算法相比,本文方法在保證配準(zhǔn)精度的基礎(chǔ)上,配準(zhǔn)時(shí)間減
2017-11-17 15:26:4515 使用脈沖砷化鎵二極管激光器作為閃光燈,并測量陣列中每個(gè)像素到成像對象的距離。換句話說,它將2D圖像變成3D圖像。
2018-01-10 09:25:007063 京東方聯(lián)合Stream TV推出來一款8K裸眼3D產(chǎn)品,可實(shí)現(xiàn)電影,電視,游戲之間的裸眼3D轉(zhuǎn)化,有300檔的實(shí)時(shí)調(diào)節(jié)3D的立體效果。
2018-01-11 14:59:243289 完成系統(tǒng)界面的設(shè)置及控制、顯示等功能,其DSP處理器實(shí)現(xiàn)圖像分割和渲染等核心算法,實(shí)現(xiàn)了1個(gè)高效的2D到3D視頻的視頻轉(zhuǎn)換系統(tǒng)。2D轉(zhuǎn)3D技術(shù)可把現(xiàn)有的大量傳統(tǒng)2D視頻轉(zhuǎn)換成3D視頻,簡化和節(jié)省了用攝像機(jī)直接捕捉3D場景的復(fù)雜性和高成本,可以極大解決3D片源不足的
2018-03-06 14:20:551 本視頻將展示結(jié)合多點(diǎn)觸摸與3D手勢模塊的Microchip顯示解決方案。支持2D/3D功能的顯示屏是Microchip基于GestIC?技術(shù)的最新解決方案。顯示屏上結(jié)合了3D手勢與2D多點(diǎn)觸摸功能,可降低安裝單個(gè)顯示模塊的復(fù)雜度。
2018-06-06 02:45:005891 在OpenGL中,一切事物都在3D空間中,但我們的屏幕坐標(biāo)確實(shí)2D像素?cái)?shù)組,OpenGL大部分工作就是把3D坐標(biāo)轉(zhuǎn)換成適應(yīng)屏幕的2D像素。3D坐標(biāo)轉(zhuǎn)換成2D屏幕坐標(biāo)的過程是有OpenGL的圖形渲染管線管理的。
2018-07-09 10:40:119142 所有這些應(yīng)用程序都說明了在AR/VR時(shí)代下的潛在用例,以及創(chuàng)建數(shù)字內(nèi)容的新方法。但問題是:我們是否會(huì)放棄舊有的2D方法,并完全轉(zhuǎn)向AR/VR這樣的3D媒介呢?對于相信生活在3D世界的我們在3D環(huán)境中進(jìn)行創(chuàng)作將更加自然的堅(jiān)定支持者而言,這是一個(gè)十分重要的問題。比如說埃隆·馬斯克。
2018-10-10 10:23:02991 研究團(tuán)隊(duì)寫道:“我們的關(guān)鍵思想是將圖像生成過程分解為三個(gè)要素:形狀、視角和紋理,這種分離的3D表示方式使我們能夠在對抗學(xué)習(xí)框架下從3D和2D視覺數(shù)據(jù)收集中學(xué)習(xí)模型。與現(xiàn)有的2D生成模型相比,我們的模型合成的圖像更加逼真;它還允許3D操作,這用以前的2D方法是無法實(shí)現(xiàn)的。”
2018-12-07 09:28:338431 ,消費(fèi)者們已習(xí)慣了看到有縱深且能夠旋轉(zhuǎn)的物體,以及能在屏幕上移動(dòng)來顯示更多選項(xiàng)的菜單。iPad、iTouch和Android設(shè)備就是最好例證。成千上萬的液晶顯示驅(qū)動(dòng)消費(fèi)類設(shè)備都以具備3D功能作為核心的用戶界面技術(shù)。 3D優(yōu)于2D的原因顯而易見。從清晰度來看,2D圖像就像一張照片,只有寬度和高度,
2019-02-27 14:42:021391 
在2019年12月,VR社交平臺(tái)Bigscreen宣布與派拉蒙影業(yè)合作,建立具有開創(chuàng)性的新合作伙伴關(guān)系,將2D和3D電影引入VR影院中。在第一個(gè)月中,成千上萬的用戶進(jìn)入VR世界,與來自世界各地的影迷一起觀看電影如《奪寶奇兵4:水晶頭骨》、3D版《僵尸世界大戰(zhàn)》、《少數(shù)派報(bào)告》等。
2020-01-13 14:11:181926 已經(jīng)有不少機(jī)構(gòu)在將 2D 圖像轉(zhuǎn)換為 3D 形式的方面進(jìn)行了嘗試,包括 Facebook、Nvidia 等公司的 AI 研究實(shí)驗(yàn)室,或是類似 Threedy.AI 這樣的初創(chuàng)公司。
2020-03-07 14:23:173526 為了提高稀疏3D激光雷達(dá)捕獲點(diǎn)云的分辨率,MIT的研究人員通過研究,將這個(gè)問題從3D問題轉(zhuǎn)換為2D圖像空間中的圖像超分辨率問題,使用深度卷積神經(jīng)網(wǎng)絡(luò)來解決。
2020-05-17 09:47:002481 不難判斷,在此趨勢下,3D 機(jī)器視覺將面臨較快的增長趨勢,3D 視覺未來將逐步取代 2D 識(shí)別技術(shù),在許多“痛點(diǎn)型應(yīng)用場景”中大顯身手,發(fā)展成為主流視覺系統(tǒng)。
2020-08-21 10:33:085667 測量表面法向量估計(jì) 幾何測量平面提取 3D重建從離散點(diǎn)云得到光滑曲面 3D重建ICP點(diǎn)云配準(zhǔn) 3D重建SDF表面重建 應(yīng)用例子:從稀疏的點(diǎn)云中,構(gòu)造出可以3D打印的模型 3D物體分割、識(shí)別與測量 應(yīng)用算法流程3D物體分割、識(shí)別與測量 應(yīng)用算法流程靜態(tài)手勢識(shí)別 應(yīng)用算
2020-10-23 09:40:464061 
在屏幕顯示技術(shù)上,三星確實(shí)擁有不俗的實(shí)力,但過往的技術(shù)也只是基于2D平面顯示,而在三星看來,未來是屬于3D的。三星已經(jīng)朝著全息圖邁出了堅(jiān)實(shí)的一步,它的原型薄板設(shè)備能以4K分辨率顯示3D圖像,并具有
2020-11-13 10:17:543302 隨著對精度和自動(dòng)化的需求不斷增加,3D機(jī)器視覺會(huì)變得越來越流行。業(yè)界認(rèn)為,從2D到3D的過渡將成為繼黑白到彩色、低分辨率到高分辨率以及靜態(tài)圖像到電影之后的第四次革命。 1、什么是3D相機(jī)? 3D即
2020-11-26 16:17:0314473 導(dǎo)購等領(lǐng)域的門檻。該研究成果已被AI頂會(huì)NeurIPS 2020收錄。 盡管3D打印、VR等應(yīng)用場景逐漸成熟,但以3D搜索為代表的3D智能技術(shù)依舊處于早期研究階段。例如,受限于2D圖片顏色、紋理信息和3D模型形狀信息之間的差異,傳統(tǒng)AI方法模型匹配的準(zhǔn)確率較低。過去幾年,包括卡
2020-12-04 15:49:214285 這是一種為 3D 點(diǎn)云提出的無監(jiān)督膠囊架構(gòu),并且在 3D 點(diǎn)云重構(gòu)、配準(zhǔn)和無監(jiān)督分類方面優(yōu)于 SOTA 方法。 理解對象是計(jì)算機(jī)視覺的核心問題之一。傳統(tǒng)方法而言,理解對象任務(wù)可以依賴于大型帶注釋
2021-01-02 09:39:002733 谷歌發(fā)明的由2D圖像生成3D圖像的技術(shù),利用3D估計(jì)神經(jīng)網(wǎng)絡(luò)圖像信息的補(bǔ)全以及預(yù)測,融合了拍攝角度、光照等信息,讓生成的3D圖像看起來更加逼真,這種技術(shù)對于三維建模以及工業(yè)應(yīng)用都具有極大的指導(dǎo)意義。
2020-12-24 12:55:235465 
JAKA Lens視覺可以通過圖像處理算法提取圖像特征,從而實(shí)現(xiàn)2D視覺檢測、定位和安全防護(hù);通過高像素的3D相機(jī)獲取物體的三維信息,通過節(jié)自主研發(fā)的點(diǎn)云配準(zhǔn)算法進(jìn)行處理,實(shí)時(shí)獲取目標(biāo)物體的三維位姿,從而實(shí)現(xiàn)3D點(diǎn)云配準(zhǔn)。
2021-01-15 15:48:532884 為對激光掃描儀與數(shù)碼相機(jī)中的數(shù)據(jù)進(jìn)行有效配準(zhǔn),提岀一種基于中心投影的多幅點(diǎn)云數(shù)據(jù)與紋理序列自動(dòng)配準(zhǔn)方法。對多幅局部點(diǎn)云數(shù)據(jù)進(jìn)行預(yù)處理操作,實(shí)現(xiàn)多幅局部點(diǎn)云數(shù)據(jù)配準(zhǔn),形成一幅完整的點(diǎn)云數(shù)據(jù)釆用中心投影
2021-03-18 10:42:415 3D視覺定位的直接目標(biāo)是計(jì)算當(dāng)前圖像的照相機(jī)位姿,解決該問題的直接方案是建立3D點(diǎn)與2D點(diǎn)之間的匹配關(guān)系,通過二者的匹配關(guān)系估計(jì)
2021-04-01 14:46:045083 
在利用航拍遙感圖像進(jìn)行土地測量與變化檢測時(shí),需要對圖像進(jìn)行配準(zhǔn)處理。為實(shí)現(xiàn)目標(biāo)區(qū)域的高精度匹配,提出一種遙感圖像配準(zhǔn)方法。對圖像進(jìn)行U-net分割,以適用于小樣本數(shù)據(jù)集的處理,針對不同區(qū)域特征的誤差
2021-05-28 14:41:392 ! 3D視覺與2D視覺的技術(shù)差異 3D 視覺與 2D視覺技術(shù)的最大區(qū)別在于處理的數(shù)據(jù)類型不同。在 3D 視覺領(lǐng)域,被處理的對象通常是依靠 3D 傳感器采集到的三維點(diǎn)云數(shù)據(jù),而 2D 視覺技術(shù)主要被用于處理平面圖像里的信息。這決定了 3D 視覺不僅能夠感知場景中物體
2021-09-01 09:52:147363 首先是3d人臉識(shí)別和2d人臉識(shí)別圖像數(shù)據(jù)獲取不同。3D人臉識(shí)別是以3D攝像頭立體成像,而2D是以2D圖像獲取為基礎(chǔ)的。
2022-02-05 16:00:0052914 3D 點(diǎn)云廣泛應(yīng)用于 3D 識(shí)別技術(shù)中。一些特別的應(yīng)用領(lǐng)域往往對 3D 點(diǎn)云識(shí)別的安全性有更高的要求,如自動(dòng)駕駛、醫(yī)療圖像處理等。學(xué)界目前對點(diǎn)云安全性的研究集中在對抗攻擊的穩(wěn)健性。與對抗性攻擊相比, 自然的失真和擾動(dòng)在現(xiàn)實(shí)世界中更為常見。
2022-03-15 11:34:032393 該項(xiàng)目將借助KV260上的PYNQ-DPU覆蓋,從而能夠使我們在LiDAR點(diǎn)云上進(jìn)行3D對象檢測比以往任何時(shí)候都更加高效!
2022-04-26 17:41:333149 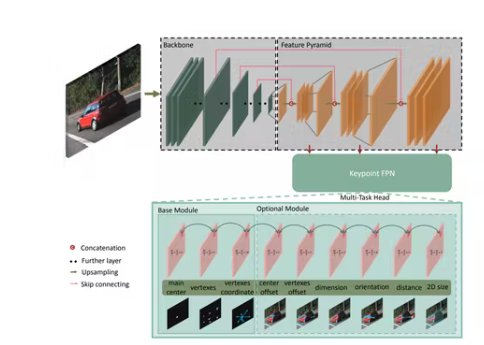
因?yàn)間t label中提供的bbox信息是Camera坐標(biāo)系的,因此在訓(xùn)練時(shí)需要使用外參等將其轉(zhuǎn)換到Lidar坐標(biāo)系; 有時(shí)想要把3d bbox映射到圖像中的2d bbox方便可視化,此時(shí)需要內(nèi)參。
2022-05-31 10:49:233936 可逆渲染流程 NVIDIA 3D MoMa 將于本周在新奧爾良舉行的計(jì)算機(jī)視覺和模式識(shí)別會(huì)議 CVPR 上亮相。
2022-06-23 11:00:352035 融合標(biāo)注使用的3D標(biāo)注工具仍以3D立體框?yàn)橹鳎?b class="flag-6" style="color: red">3D點(diǎn)云數(shù)據(jù)以外,還需要使用2D標(biāo)注工具在點(diǎn)云數(shù)據(jù)相對應(yīng)的2D圖像中進(jìn)行標(biāo)注,3D點(diǎn)云數(shù)據(jù)中的標(biāo)注對象與2D圖像中的標(biāo)注對象一一對應(yīng),具體形式如下:
2022-07-21 15:52:3610124 FSD beta所采用的voxel 3D NN的技術(shù)細(xì)節(jié)并未得到披露,從類似的一般性的公開方法來說,從2D單個(gè)圖像中恢復(fù)出voxel 3D信息的方法是基于標(biāo)準(zhǔn)的Encoder—Decoder結(jié)構(gòu)的。小編以一篇公開論文(V3DOR網(wǎng)絡(luò))為例,大致論述一下其背后的技術(shù)原理。
2022-10-11 15:32:481097 準(zhǔn)確描述和檢測 2D 和 3D 關(guān)鍵點(diǎn)對于建立跨圖像和點(diǎn)云的對應(yīng)關(guān)系至關(guān)重要。盡管已經(jīng)提出了大量基于學(xué)習(xí)的 2D 或 3D 局部特征描述符和檢測器,但目前的研究對直接地匹配像素和點(diǎn)的共享描述符,以及聯(lián)合關(guān)鍵點(diǎn)檢測器的推導(dǎo)仍未得到充分探索。
2022-10-18 09:20:1111003 深度學(xué)習(xí)在自動(dòng)駕駛領(lǐng)域可謂無往不利,點(diǎn)云配準(zhǔn)領(lǐng)域也不例外。基于深度學(xué)習(xí)的點(diǎn)云配準(zhǔn)算法不斷被提出,包括PointNetLK、DCP、IDAM、RPM-Net、3DRegNet等,且這些深度學(xué)習(xí)模型在實(shí)驗(yàn)室中已經(jīng)證明性能與速度上均遠(yuǎn)超ICP和NDP方法。
2022-11-11 14:18:112975 這樣的物理規(guī)范,具有很高的普適性,applicable 到所有維度空間。對二維 2D 拓?fù)浣^緣體 (2D - TI) 和三維 3D 拓?fù)浣^緣體 (3D - TI),其體 - 邊對應(yīng)性由圖 1 所示的輸運(yùn)性質(zhì)來表達(dá)最為簡單直觀。
2022-11-23 10:23:544337 3D顯示器的基本原理是利用人的雙眼成像,通過不同眼球分別傳輸不同的圖像,然后本來2D(只有X和Y的圖像)在大腦中自動(dòng)組合,最終形成具有景深的3D圖像。
2022-12-09 11:58:275702 這個(gè)工作來自于浙江大學(xué)和DAMO academy。在點(diǎn)云配準(zhǔn)領(lǐng)域,盡管已經(jīng)有很多方法被提出來,但是無論是傳統(tǒng)方法,還是近年來蓬勃發(fā)展的基于深度學(xué)習(xí)的三維點(diǎn)云配置方法,其實(shí)在真正應(yīng)用到真實(shí)的LiDAR掃描點(diǎn)云幀時(shí)都會(huì)出現(xiàn)一些問題。
2023-01-12 17:33:482447 我們之前見過的閃存多屬于Planar NAND平面閃存,也叫有2D NAND或者直接不提2D的,而3D 閃存,顧名思義,就是它是立體堆疊的,Intel之前用蓋樓為例介紹了3D NAND,普通NAND是平房,那么3D NAND就是高樓大廈,建筑面積一下子就多起來了,理論上可以無線堆疊。
2023-03-30 14:02:394215 光場3D成像的原理與傳統(tǒng)CCD和CMOS相機(jī)成像原理在結(jié)構(gòu)原理上有所差異,傳統(tǒng)相機(jī)成像是光線穿過鏡頭在后續(xù)的成像平面上直接成像,一般是2D圖像。
2023-04-08 11:21:033755 從3D點(diǎn)云中生成可渲染的3D網(wǎng)格:使用一個(gè)基于深度學(xué)習(xí)的方法來將點(diǎn)云轉(zhuǎn)換為可渲染的3D網(wǎng)格。具體地,該方法使用一個(gè)編碼器網(wǎng)絡(luò)將3D點(diǎn)云編碼為特征向量,并使用一個(gè)解碼器網(wǎng)絡(luò)將特征向量解碼為可渲染的3D網(wǎng)格。
2023-04-16 10:02:042974 隨著計(jì)算機(jī)視覺技術(shù)的不斷發(fā)展,3D 數(shù)字化技術(shù)已經(jīng)成為了當(dāng)今工業(yè)制造領(lǐng)域和三維醫(yī)學(xué)影像領(lǐng)域的關(guān)鍵技術(shù)。然而,構(gòu)建高精度、高分辨率的 3D 點(diǎn)云數(shù)據(jù)集對于實(shí)現(xiàn)這一技術(shù)至關(guān)重要。在這篇文章中,我們將深入探討 3D 點(diǎn)云數(shù)據(jù)集的構(gòu)建、應(yīng)用以及其在 3D 數(shù)字化技術(shù)中的重要性。
2023-05-06 16:46:172218 機(jī)器視覺正在為超大場景的3D數(shù)據(jù)感知提供很多新的方法。比如自動(dòng)化的成像方法,像視覺SLAM在線處理連續(xù)幀的圖像,實(shí)現(xiàn)實(shí)時(shí)重建巨大3D場景。再比如說對航拍數(shù)據(jù)進(jìn)行點(diǎn)云分割和點(diǎn)云數(shù)據(jù)的語義理解,幫助快速低成本獲取城市3D數(shù)據(jù)。
2023-05-22 10:21:54935 面向點(diǎn)云處理領(lǐng)域的基礎(chǔ)工具課,主要以Python為編程主要語言,介紹Open3D庫的使用方法。課程特點(diǎn)簡單易用,快速上手點(diǎn)云數(shù)據(jù)處理,更加側(cè)重于實(shí)戰(zhàn),涉及的話題包括點(diǎn)云的配準(zhǔn)、去噪、采樣、分割等,每個(gè)案例均提供源碼進(jìn)行實(shí)戰(zhàn)。
2023-05-29 09:49:596957 
? 將2D/3D圖表和圖形添加到WindowsForms應(yīng)用程序中 包括您可能需要的所有功能,并以100%托管代碼編寫。很好地集成到儀表板和商業(yè)智能軟件中。由響應(yīng)迅速的支持團(tuán)隊(duì)提供支持。 14種主要
2023-06-15 11:45:346200 預(yù)訓(xùn)練的2D圖像或語言Transformer:作為基礎(chǔ)Transformer模型,具有豐富的特征表示能力。作者選擇了先進(jìn)的2D Transformer模型作為基礎(chǔ)模型,例如Vision Transformers (ViTs) 或者語言模型(如BERT)。
2023-07-03 10:59:431587 
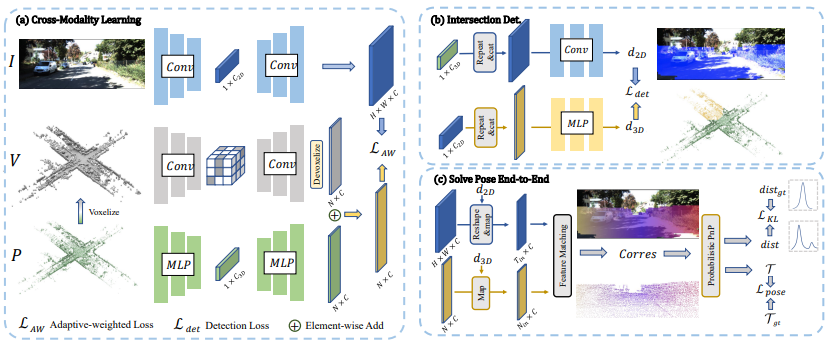
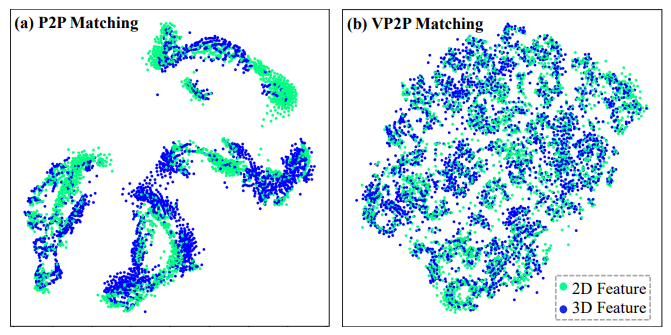
現(xiàn)有方法往往是:用一個(gè)2D特征提取網(wǎng)絡(luò)提取圖像特征;用一個(gè)3D特征提取網(wǎng)絡(luò)提取點(diǎn)云特征;然后根據(jù)pixel-to-point對應(yīng)關(guān)系真值通過Metric Learning (Triplet
2023-10-29 17:14:011917 
基于特征的配準(zhǔn)方法
主要是采用各種算法提取基準(zhǔn)圖像和實(shí)時(shí)圖像的特征,如邊緣、角點(diǎn)、曲率、不變矩等,然后對提取的特征進(jìn)行描述從而使其可以按照某種相似性測度進(jìn)行匹配。
2023-11-06 16:54:515164 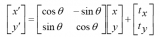
3D實(shí)例分割(3DIS)是3D領(lǐng)域深度學(xué)習(xí)的核心問題。給定由點(diǎn)云表示的 3D 場景,我們尋求為每個(gè)點(diǎn)分配語義類和唯一的實(shí)例標(biāo)簽。 3DIS 是一項(xiàng)重要的 3D 感知任務(wù),在自動(dòng)駕駛、增強(qiáng)現(xiàn)實(shí)和機(jī)器人導(dǎo)航等領(lǐng)域有著廣泛的應(yīng)用,其中可以利用點(diǎn)云數(shù)據(jù)來補(bǔ)充 2D 圖像提供的信息。
2023-11-13 10:34:273744 
3D霍爾開關(guān)是一種新型的磁感應(yīng)開關(guān)器件,它利用磁性材料之間的相互作用力來檢測磁場的變化,并輸出相應(yīng)的開關(guān)信號(hào)。與傳統(tǒng)的2D霍爾開關(guān)相比,3D霍爾開關(guān)具有更高的靈敏度和可靠性,因此在很多領(lǐng)域得到了廣泛
2023-11-16 16:16:063697 
有許多不同的方法和算法可用于從2D圖像執(zhí)行3D重建。選擇的方法取決于諸如輸入圖像的質(zhì)量、攝像機(jī)校準(zhǔn)信息的可用性以及重建的期望準(zhǔn)確性和速度等因素。
2023-12-05 14:07:304939 
作為一個(gè)多年經(jīng)驗(yàn)的機(jī)器視覺工程師,我將詳細(xì)介紹2D和3D視覺技術(shù)的不同特點(diǎn)、應(yīng)用場景以及它們能夠解決的問題。在這個(gè)領(lǐng)域內(nèi),2D和3D視覺技術(shù)是實(shí)現(xiàn)自動(dòng)化和智能制造的關(guān)鍵技術(shù),它們在工業(yè)檢測、機(jī)器人導(dǎo)航、質(zhì)量控制等眾多領(lǐng)域都有著廣泛的應(yīng)用。
2023-12-21 09:19:062688 一文了解3D視覺和2D視覺的區(qū)別 3D視覺和2D視覺是兩種不同的視覺模式,其區(qū)別主要體現(xiàn)在立體感、深度感和逼真度上。本文將詳細(xì)闡述這些區(qū)別,并解釋為什么3D視覺相比2D視覺更具吸引力和影響力。 首先
2023-12-25 11:15:105091 二維(2D)和三維(3D)雙模視覺信息在自動(dòng)駕駛、工業(yè)機(jī)器人、人機(jī)交互等前沿領(lǐng)域具有廣泛的應(yīng)用前景。
2024-01-05 10:35:281304 
美國賓夕法尼亞州立大學(xué)的研究人員展示了一種使用2D材料進(jìn)行3D集成的新穎方法。
2024-01-13 11:37:281875 2D NAND和3D NAND都是非易失性存儲(chǔ)技術(shù)(NVM Non-VolatileMemory),屬于Memory(存儲(chǔ)器)的一種。
2024-03-17 15:31:392376 
電子發(fā)燒友網(wǎng)站提供《AN-1249:使用ADV8003評估板將3D圖像轉(zhuǎn)換成2D圖像.pdf》資料免費(fèi)下載
2025-01-08 14:28:210 的連線效果是如何實(shí)現(xiàn)的。我們將從 基本概念、實(shí)現(xiàn)步驟、關(guān)鍵代碼 多個(gè)維度,逐步剖析這個(gè)效果的具體實(shí)現(xiàn)過程,為你提供全面的知識(shí)和實(shí)踐指導(dǎo)。 盡管 2D 與 3D 連線效果看起來復(fù)雜,其本質(zhì)仍然是二維節(jié)點(diǎn)之間的連接。只需要通過一些巧妙的技術(shù),
2025-04-09 11:28:261248 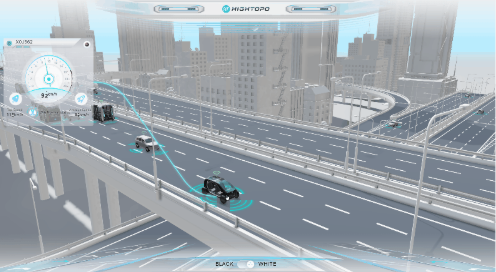
集成電路封裝技術(shù)從2D到3D的演進(jìn),是一場從平面鋪開到垂直堆疊、從延遲到高效、從低密度到超高集成的革命。以下是這三者的詳細(xì)分析:
2025-12-03 09:13:15440
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論