本文主要對接觸式三維測量和非接觸式三維測量進行了介紹。著重介紹了光學三維測量技術的各種實現方法及原理。最后對目前光學三維測量的應用進行了簡單介紹。
2022-07-13 10:09:28 4796
4796 假設 為物體的一張或多張RGB圖片。三維重建可以總結為一個學習預測算子的過程,輸入圖像到該算子可得到一個和物體相似的模型。因此重建的目標函數為,其中為算子的參數,為重建結果和目標的距離函數,也稱作深度學習中的損失函數。
2023-02-13 09:31:461157 本文章專注于從RGB圖像估計三維物體形狀的深度學習方法。除此之外我們還回顧了關于特定物體(如人臉)的近期研究。
2023-03-10 10:20:451730 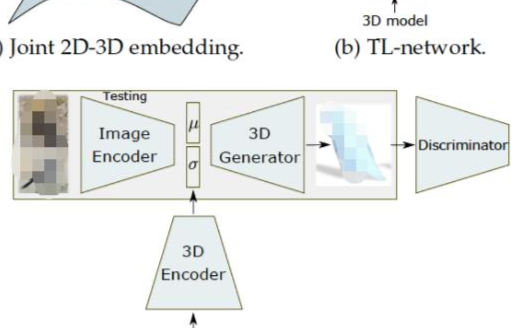
智能芯片之三維內存介紹
2021-01-29 07:39:22
求哪位大神幫忙編一個三維加速度采集的LabVIEW8.5程序,采集卡NI9233,三個三維KISTLER加速度傳感器。QQ2984833847
2013-11-01 22:46:14
的HANDYSCAN三維激光掃描儀采集它的三維點云信息,然后利用Vxelements軟件對多站式點云數據進行拼接、統一化和去燥,將處理后的點云數據導入Geomagic Studio軟件,對其進行封裝、孔洞填充、平滑等
2018-08-07 11:14:41
用三維線條圖做了一個同心圓曲線,怎么才能把它導入到三維圖形控件中呢?如圖
2014-10-27 13:49:36
]三維點云及stl數據STEP4:數模與掃描數據進行擬合對齊,進行檢測分析[img][/img]三維檢測比對(四)小結手持式激光三維掃描儀和全局攝影測量系統用了一個小時左右,便完成了三維掃描工作并獲得了
2017-08-21 10:48:54
德國pi公司的三維移動平臺如何用labview控制呢?
2012-03-05 13:00:06
CAD是目前工業制造產品設計的重要軟件之一,廣泛應用于機械、建筑等領域。而常用的CAD軟件,也就是所謂的三維制圖軟件,較二維的圖紙和二維的繪圖軟件,三維CAD軟件能夠更加直觀、準確地反映實體和特征
2019-07-03 07:06:31
的戶外廣告燈箱的生產圖紙。客戶原來是使用老式的拍照式三維掃描儀,掃描前需要噴粉、貼點,但是掃描數據精度卻差強人意,不僅外觀粗糙、噪點多,且掃描速度慢,工作效率低。在掃描結束后,還需要再對噴的粉(顯像劑
2020-07-15 10:52:54
鼠標點在3D球體上,能夠自動輸出該點三維坐標。謝謝各位大牛們
2015-04-14 23:44:18
請問各位大神,如何在labview做的三維圖中確定鼠標的坐標,也就是鼠標每點一次相應點的三個坐標能顯示出來。。。求各位大神幫幫忙。
2015-09-26 18:05:53
各位大神請問當鼠標放在三維曲面圖上的時候,如何顯示鼠標在這一點的xyz三個點的坐標值?如下圖:中當我把鼠標放在三維圖上的時候如何知道鼠標在這一點的三個坐標值?各位大神幫幫忙,,非常感謝。
2015-10-18 13:51:42
如何運用LabVIEW中的三維散點控件?我想將excel中的數據在LabVIEW中顯示出來,顯現出三維定點的效果
2013-05-15 16:28:41
`廣西掃描服務三維檢測三維掃描儀中科院廣州電子的Creaform便攜式激光三維掃描儀,包括便攜式GoSCAN全彩三維掃描儀,便攜式HandySCAN工業級三維掃描儀,接觸式超高精度CMM
2018-08-29 14:42:40
想問下如果知道一個物體的三維點集,labview有沒有哪個部件,能夠用給出的點集繪制成三維圖,類似3dmax的效果如題
2019-07-02 18:26:22
三維內存對人們生產生活方面的貢獻智能芯片的三維內存
2020-12-24 06:54:39
;step3.數模與掃描數據進行擬合對齊,進行三維檢測分析;step4.根據檢測數據對產品外形進行修正優化。/ 04 /掃描數據結果▼鑄件連桿掃描數據▲鑄件連桿的點云數據▲鑄件連桿的stl數據▲連桿與數模檢測
2017-08-09 11:17:25
大家好!已知,起點,經過點,終點,三點xyz,畫三維圓弧。在三維圖片框里面畫。該如何實現?甚至三維點,直線,圓弧,圓。都可以畫。
2024-07-17 21:33:42
針對以往文獻在處理空間目標圖像時使用的配準幀差方法,存在不能配準旋轉背景以及沒有充分利用目標運動特征等問題,提出了一種基于恒星配準的檢測方法。該方法以恒星
2009-12-19 14:43:09 19
19 基于角點的紅外與可見光圖像自動配準方法摘要:針對紅外圖像與可見光圖像的自動配準問題,提出了一種基于圖像角點特征以及仿射變換模型的方法.利用Ha
2010-05-12 09:11:5529 本文詳細地介紹了反向射線跟蹤的三維路徑搜索方法與步驟,場強的計算方法,并用所編寫的軟件進行實際小區三維建模、測試點場強計算,計算值與測量值基本符合
2011-08-02 10:28:064281 
在自主移動機器人上安裝二維激光測距儀和內置室內小型電機云臺。將激光的平面信息和電機云臺的高度信息結合構建一個三維模型。通過RANSAC算法從三維點云陣中提取平面。并在圖像
2013-09-16 14:46:4170 采用主成分分析方法(PCA)定義了簡單的數學模型和軸向確定方法等來實現配準。大量實驗證明,算法能夠快速實現任意形狀、大小及位置的兩片點云配準。
2013-09-23 17:59:0825 光學方法測量三維形狀綜述光學方法測量三維形狀綜述光學方法測量三維形狀綜述
2016-01-07 16:48:363 SIFT特征點提取過程,提出了一種多尺度角點提取方法,提取的多尺度角點對圖像旋轉和尺度變化有很好的適用性。并用SIFT描述子描述,用光學及SAR圖像進行了配準實驗。結果表明,與SIFT、Harris算法相比,本文方法在保證配準精度的基礎上,配準時間減
2017-11-17 15:26:4515 點云數據的對應圖像坐標為約束條件,進行高精度特征點匹配;最后以兩對同名點在相鄰兩場景中的空間距離應該一致為條件,保留匹配精度高的點,用于計算旋轉矩陣和平移矩陣,進行三維模型間的空間拼接。實驗結果表明:與傳統拼
2017-11-22 16:46:220 針對快速、高效的三維模型形狀分析與匹配技術的迫切需求,提出了融合內蘊熱核特征與局部體積特征的三維模型對應形狀分析方法。首先,通過拉普拉斯映射以及熱核分布提取模型的內蘊形狀特征;其次,結合模型熱核特征
2017-12-01 16:48:190 針對三維顱骨模型在初始姿態相差較大以及存在較多缺失情況下自動配準困難的問題,提出一種基于邊緣對應的三維顱骨非剛性自動配準方法。首先對待配準三維顱骨進行邊緣提取,獲得所有孔洞的邊緣;然后根據邊緣長度
2017-12-09 10:23:240 針對迭代最近點(ICP)算法需要兩幅點云具有良好的初始位置,否則易陷入局部最優的問題,提出了一種基于平移域估計的點云全局配準算法。首先分別計算數據點云和模型點云的去模糊主方向點云,利用兩者平行于
2017-12-18 13:50:110 針對耳廓多角度掃描獲取的三維網格合并問題,提出了一種新的三維網格合并方法一一去補丁合并法.首先,基于kd-tree算法將三維耳廓配準后的兩幅網格快速分割為重疊區域與非重疊區域;然后,根據連通性對重
2018-01-09 18:29:580 的特征提取不僅可以更好地刻畫三維模型特征,并且其在模型重建、點云分割、對稱性檢測以及點云配準等。方面起到一定的作用。特征提取主要包括對點、線及面的提取,目前主要有2種方法:1)從三維網格化后的點云數據中提取特征;
2018-01-30 16:35:070 三維激光掃描技術又被稱為實景復制技術,是測繪領域繼GPS技術之后的一次技術革命。它突破了傳統的單點測量方法,具有高效率、高精度的獨特優勢。三維激光掃描技術能夠提供掃描物體表面的三維點云數據,因此可以用于獲取高精度高分辨率的數字地形模型。
2018-03-02 15:43:1941829 模型重建方法。利用智能手機拍攝物體,通過計算相機內部參數和目標物體的三維信息,生成物體表面的密集點云數據,并根據點云數據建立三維模型。最終以三維激光掃描結果為基礎對模型進行分析評價。實驗結果表明,該方法可
2018-11-15 16:15:3113 特征學習網絡的結構如下圖所示,包括體素分塊(Voxel Partition),點云分組(Grouping),隨機采樣(Random Sampling),多層的體素特征編碼(Stacked Voxel
2018-12-07 09:32:1023003 在三維非剛性模型分析中,通常需要對不同姿態下的模型進行配準。針對傳統配準算法存在復雜度高、計算量大、精確度低等問題,提出一種新的基于分層策略的三維非剛性模型配準算法。首先,定義熱核簽名函數為模型
2019-01-23 14:50:483 傳統ICP算法精度受點云初始位姿影響較大,收斂速度慢,不能滿足精細化點云建模的要求。基于此問題,通過基于快速點特征直方圖的采樣一致性配準方法進行粗配準。首先將兩幀待配準點云進行體素濾波,其次進行表面
2019-03-01 09:34:0714 與二維圖像中會相互遮擋的物體不同,三維點云中的物體都是天然分離的,使得三維目標內部各個部分的相對位置可以精確獲取,這些方法將有效提高目標檢測方法的性能。基于這樣的觀察結果,研究人員提出了一個部分感知和聚合的網絡結構來進行三維點云目標檢測。
2019-08-02 14:18:474168 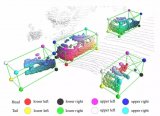
作為三維數據的重要形式,點云由于較高的分辨率和對復雜細節更好的表達越來越受到研究人員的青睞。有效的點云生成模型將為重建和超分辨等點云合成任務帶來較大的促進作用。
2019-08-02 14:32:547305 這些方法在近年來取得了令人矚目的效果,在通用物體重建和類似人臉的特殊物體重建上都取得了不錯的結果。接下來我們將從重建問題的流程,三維表示,基于不同表示的重建方法、模型架構、數據集以及訓練過程等方面回顧過去幾年間深度學習在這一領域的發展。
2019-08-02 15:04:246720 記錄。 掃描數據管理 一旦將目標物體捕捉至點云數據,就可以將三維數據集輸入到所用的配準軟件,來配準和管理單個點云。配準軟件提供有多款工具,能夠讓用戶處理掃描數據、在項目中導航、以最佳的色彩細節實現數據可視化,首
2020-04-20 11:05:411375 三維計算視覺研究內容包括: 1)三維匹配:兩幀或者多幀點云數據之間的匹配,因為激光掃描光束受物體遮擋的原因,不可能通過一次掃描完成對整個物體的三維點云的獲取。因此需要從不同的位置和角度對物體進行掃描
2020-11-27 10:32:465660 針對點云數據本身信息量不足導致現有三維點云分類方法分類精度較低的問題,結合多模態特征融合,設計一種三維點云分類模型。通過引入投影圖對點云數據信息進行擴充,將點云數據與圖像數據同時作為輸入
2021-03-11 14:09:113 為對激光掃描儀與數碼相機中的數據進行有效配準,提岀一種基于中心投影的多幅點云數據與紋理序列自動配準方法。對多幅局部點云數據進行預處理操作,實現多幅局部點云數據配準,形成一幅完整的點云數據釆用中心投影
2021-03-18 10:42:415 近年來,深度傳感器和三維激光掃描儀的普及推動了三維點云處理方法的快速發展。點云語義分割作為理解三維場景的關鍵步驟,受到了研究者的廣泛關注。隨著深度學習的迅速發展并廣泛應用到三維語義分割領域,點云語義
2021-04-01 14:48:4616 針對現有基于深度學習的三維模型識別方法缺乏結合三維模型的上下文細粒度局部特征,可能造成幾何形狀極其相似,局部細節信息略有不同的類識別混淆的問題,提岀一種基于深度圖注意力卷積神經網絡的三維模型識別方法
2021-04-02 13:56:286 范圍圖像可以表示為三種類型,即深度圖像、點云或多邊形網。給定一幅距離圖像,即三維對象的目標識別就是正確地識別事物中存在的物體范圍成像,并確定他們的姿勢,在概念層次上,基于典型的局部特征三維物體
2021-04-18 10:52:192710 
文中提出了一種基于激光雷達點云的三維目標檢測算法 Voxeircnn( Voxelization Region-based Convolutional Neural Networks),該算
2021-05-08 16:35:2445 點云數據的分類和語義分割在自動駕駛、智能機器人、全息投影等領域中有著重要應用。傳統手工提取點云特征的方式,以及將三維點云數據轉化為多視圖、體素網格等數據形式后再進行特征學習的方式,都存在處理環節多
2021-05-18 16:01:4610 車輛輪廓的三維點云模型在汽車智能化制造及維保過程中具有重要作用。為提高點云配準的精度和效率,以汽車維保機器人為研究對象,提出一種基于點云數據處理技術的車輛輪廓掃描定位及點云數據配準方法在機械臂末端
2021-05-26 15:56:366 ,將變量含異質噪聲模型應用于配準參數估計,提高目標區域的配準精度。實驗結果表明,與基于 Harris角點的配準方法相比,該方法的全局平均配準精度提高41.39%,與基于SIFT特征點的配準方法相比,其感興趣區域的平均配準精度提高16.67%。
2021-05-28 14:41:392 深度強化學習(Deep RL)可以通過序列決策式的方式,在很多方面得到應用。這里我們主要介紹一篇CVPR‘21使用RL做點云圖像配準的文章:ReAgent: Point Cloud
2021-07-02 08:57:323795 
點云概念 點云與三維圖像的關系:三維圖像是一種特殊的信息表達形式,其特征是表達的空間中三個維度的數據,表現形式包括:深度圖(以灰度表達物體與相機的距離),幾何模型(由CAD軟件建立),點云模型(所有
2021-08-17 09:18:548462 
什么是三維圖像處理? 三維圖像處理是指通過幾何變換、濾波、圖像分割和其他形態學運算,對三維圖像數據進行可視化、處理和分析。 三維圖像處理常用于醫學成像中,對來自 MRI 或 CT 掃描等射線照相來源
2021-11-05 17:43:203962 基于三維激光點云的目標識別與跟蹤研究 來源:《汽車工程》 ,作者徐國艷等 [摘要] 針對無人車環境感知中的障礙物檢測問題,設計了一套基于車載激光雷達的目標識別與跟蹤方法。為降低計算量,提高處理速度
2022-01-17 11:22:441112 基于三維激光點云的目標識別與跟蹤研究 來源:《汽車工程》?,作者徐國艷等 [摘要]?針對無人車環境感知中的障礙物檢測問題,設計了一套基于車載激光雷達的目標識別與跟蹤方法。為降低計算量,提高處理速度
2022-02-15 13:36:383733 
三維點云數據用于表征目標表面的海量點集合,但是各個離散點之間并沒有拓撲關系,一般通過建立點云的空間索引來實現基于鄰域關系的快速查找。在三維點云數據中用的較為廣泛的兩種結構分別是Kdtree和Octree。
2022-03-14 10:57:598637 3D點云學習( Point Clouds)作為近年來的研究熱點之一,受到了廣泛關注,每年在各大會議上都有大量的相關文章發表。
2022-11-02 15:07:221610 深度學習在自動駕駛領域可謂無往不利,點云配準領域也不例外。基于深度學習的點云配準算法不斷被提出,包括PointNetLK、DCP、IDAM、RPM-Net、3DRegNet等,且這些深度學習模型在實驗室中已經證明性能與速度上均遠超ICP和NDP方法。
2022-11-11 14:18:112975 本工作受D2-Net啟發,提出了一種新的三維點云關鍵點定義方式,將其與三維點的特征描述子關聯起來,有效的回答了什么是三維點云中的關鍵點,并驗證了該方法檢測到的關鍵點的可重復性。
2022-11-22 09:46:482288 精配準的模式基本上已經固定為使用ICP算法及其各種變種。ICP算法由Besl and McKay 1992, Method for registration of 3-D shapes文章提出。
2022-11-28 16:12:312500 點云配準過程就是求一個兩個點云之間的旋轉平移矩陣(rigid transform or euclidean transform 剛性變換或歐式變換),將源點云(source cloud)變換到目標點
2022-12-02 09:40:192462 空間的三維點云數據,繼而快速建立結構復雜、不規則場景的三維可視化模型,為后續BIM應用提供了全面、可靠的數據支持。
2022-12-02 10:34:071244 
根據三維模型的表示形式可以將圖像三維重建方法分類為基于體素的三維重建、基于點云的三維重建和基于網格的三維重建,其中基于網格的三維重建方法包含單一顏色的網格三維重建和具有色彩紋理的網格三維重建
2023-01-09 14:26:563749 這個工作來自于浙江大學和DAMO academy。在點云配準領域,盡管已經有很多方法被提出來,但是無論是傳統方法,還是近年來蓬勃發展的基于深度學習的三維點云配置方法,其實在真正應用到真實的LiDAR掃描點云幀時都會出現一些問題。
2023-01-12 17:33:482451 RANSAC算法被引入三維點云配準領域,其本質就是不斷的對源點云進行隨機樣本采樣并求出對應的變換模型,接著對每一次隨機變換模型進行測試,并不斷循環該過程直到選出最優的變換模型作為最終結果。
2023-03-24 09:58:421376 點云與三維圖像的關系:三維圖像是一種特殊的信息表達形式,其特征是表達的空間中三個維度的數據,表現形式包括:深度圖(以灰度表達物體與相機的距離),幾何模型(由CAD軟件建立),點云模型(所有逆向工程設備都將物體采樣成點云)。
2023-03-31 16:07:534375 三維激光掃描技術是近年來發展的新型測量方法,通過三維掃描獲取大量全面點云數據,形成三維立體模型,實現快速掌握被測目標信息。
2023-05-16 13:56:571783 為了處理上述的問題,我們提出了SDMNet,一種新的由稀疏到密集的針對大規模室外點云的配準方法。稀疏到稠密匹配方案如圖1(c)所示。具體而言,我們將配準問題分為兩個階段,即稀疏匹配階段和局部稠密匹配階段。在稀疏匹配階段,給定要對齊的源點云和目標點云、。
2023-05-24 15:53:432049 
三維激光掃描儀通過獲取高精度三維空間點云數據和真彩紋理信息,所見即所得,客觀反應真實古墓現狀。通過三維激光掃描技術獲取墓室完整精準三維點云數據及模型,為墓葬資料記錄、周期性維護、科研工作等遺址數字化提供有力依據。
2023-05-29 17:15:111358 
一、摘要 本文介紹了一種基于深度學習的三維點云配準新方法。該架構由三個部分組成: (1)編碼器由基于卷積圖的描述符組成,該描述符對每個點的近鄰進行編碼,并采用注意機制對表面法線的變化進行編碼,突出
2023-06-17 09:54:522198 
三維計算視覺研究內容包括: 1)三維匹配 :兩幀或者多幀點云數據之間的匹配,因為激光掃描光束受物體遮擋的原因,不可能通過一次掃描完成對整個物體的三維點云的獲取。因此需要從不同的位置和角度對物體進行
2023-06-19 11:06:171297 )可獲取物體到相機的距離信息,加之2D平面的X,Y坐標,可計算出每個點的三維坐標,進行三維重建、目標定位、識別等應用。
2023-07-06 10:22:181930 
三維激光掃描采用非接觸式高速激光測量方式,主動獲取數據,減少了人為對建筑的損壞。使用法如大空間高精度三維激光掃描儀,對法惠庵塔進行三維可視化激光掃描建模,獲取點云三維數據。
2023-07-10 13:30:461333 
主要利用點云數據的主軸方向進行配準。首先計算兩組點云的協方差矩陣,根據協方差矩陣計算主要的特征分量,即點云數據的主軸方向,然后再通過主軸方向求出旋轉矩陣,計算兩組點云中心坐標的便移直接求出平移向量。
2023-07-10 15:16:557565 
摘 要:點云分割是點云數據理解中的一個關鍵技術,但傳統算法無法進行實時語義分割。近年來深度學習被應用在點云分割上并取得了重要進展。綜述了近四年來基于深度學習的點云分割的最新工作,按基本思想分為
2023-07-20 15:23:593 三維場景理解與重建技術主要包含場景點云特征提取、掃描點云配準與融合、場景理解與語義分割、掃描物體點云補全與細粒度重建等,在處理真實掃描場景時,受到掃描設備、角度、距離以及場景復雜程度的影響,對技術的精準度和穩定性提出了更高的要求,相關的技術也十分具有挑戰性。
2023-08-08 16:58:532392 
該方法具體通過六個步驟實現:圖像的采集、系統相機標定、特征模板匹配、圖像處理、三維仿真匹配以及三維重建。首先,通過兩個相機于不同位置對待測物體進行圖像信息感知獲取。然后根據三角測量原理獲得待測表面的三維信息,還原三維模型并進行重建,立體視覺法原理如圖所示。
2023-09-01 16:12:574066 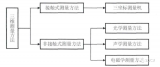
北京理工大學的科學家們開發了一種超快速準三維技術,克服了二維圖像中信息缺失和特征不完整的缺點,允許對超快速過程的三維特征進行分析。
2023-09-02 11:48:281615 
粗配準就是再兩個點云還差得十萬八千里、完全不清楚兩個點云的相對位置關系的情況下,找到一個這兩個點云近似的旋轉平移矩陣(不一定很精確,但是已經大概是對的了)。
2023-09-21 17:20:482114 粗配準就是再兩個點云還差得十萬八千里、完全不清楚兩個點云的相對位置關系的情況下,找到一個這兩個點云近似的旋轉平移矩陣(不一定很精確,但是已經大概是對的了)。
2023-09-25 11:31:021777 電子發燒友網站提供《三維立體視覺之三維恢復方法.doc》資料免費下載
2023-11-03 09:31:160 三維掃描技術后就直接變成了三維(點云數據)轉三維(三維模型)的過程。三維掃描技術直接能構建出三維點云模型,沿著點云數據的邊緣用三維軟件給模型描個邊。制作完成的模型與點云數據能直接比較,簡單、直觀,且很快看到存在的錯誤。
2023-11-10 17:11:271378 
多視圖立體幾何(Multi-View Stereo,MVS)是計算機視覺中重要的研究領域,也是邁入三維計算機視覺研究的重點問題。它通過利用多張互相重疊的圖像恢復出原始三維場景的幾何結構和紋理信息,是現實中拍攝照片的逆過程。
2023-12-04 10:08:211529 
利用雙光源手持3D掃描儀EinScan H2三維掃描儀對烏賊整體 重點軀干進行掃描,獲取烏賊三維掃描點云模型。掃描過程中通過軟件可以實時看到掃描進度以及掃描數據質量。
2024-01-26 11:25:041019 文物三維掃描,文物三維模型怎樣制作:我們都知道文物是不可再生的,要繼續保存傳承,需要文物三維數字化保護,所以三維數字化文物保護是非常重要的一個技術手段。
那么文物三維掃描,文物三維模型是怎樣
2024-03-12 11:10:231443 
三維激光掃描儀利用激光反射測距原理,通過接受和返回的信號,獲取點云三維空間坐標。這種測量方式可以無接觸快速獲取大型建筑三維空間數據,實現實體建筑的高精度數字化。
根據三維掃描得到的立面點云數據,繪制建筑立面圖紙,保證了圖紙的精準度,也同時保證了改造的精度,避免出現改造尺寸誤差較大影響施工的情況。
2024-05-07 11:44:24801 
點云建模是將測量得到的點云數據進行擬合、優化與處理,生成真實的三維模型的過程。它能夠全面、準確地顯示被掃描體的外形與內部結構,從而在山體滑坡地質災害的防治中發揮著重要作用。
在山體滑坡地質災害防治
2024-05-15 16:32:56857 
采用大空間三維激光掃描儀對廠區內部進行架站式精準三維掃描。廠區外部采用無人機傾斜攝影的方式獲取彩色模型數據,采集控制點坐標與三維點云進行坐標轉換融合點云數據,快速得到廠區內外完整的 三維數據
2024-05-29 11:55:35941 
3D相機等新型傳感器的發展克服了傳統工件尺寸測量的各種局限,可獲取豐富的三維點云數據。友思特提供了一種工件3D尺寸測量和點云處理方案,結合自研3D軟件,使得工件三維尺寸自動化測量與數據分析流程更加高效而精確。
2024-06-13 14:13:051313 
首先對蘇巴什佛寺古遺跡外部三維數據采集,獲取精準三維數據。數據采集之后進行內業處理,數據成果包括高精模型和全彩點云。
2024-07-03 13:43:46903 
三維點云是完成精密化 PCB 檢測的最新視覺技術。友思特 Saccde Vision 視覺掃描系統,采用先進的三維成像技術和算法輸出直觀點云圖,進一步確保了PCB生產的可靠性與穩定性能。
2024-08-28 16:35:441006 
點云是世界的一種非結構化三維數據表示,通常由激光雷達傳感器、立體相機或深度傳感器采集。它由一系列單個點組成,每個點由 x、y 和 z 坐標定義。
2024-10-29 09:21:201049 近年來,點云表示已成為計算機視覺領域的研究熱點之一,并廣泛應用于自動駕駛、虛擬現實、機器人等許多領域。雖然深度學習技術在處理常規結構化的二維網格圖像數據方面取得了巨大成功,但在處理不規則、非結構化的點云數據方面仍面臨著巨大挑戰。
2024-10-29 09:43:502205 
航空建筑深度估計是三維數字城市重建中的一項重要任務,基于深度學習的多視圖立體(MVS)方法在該領域取得了較好的成果。目前的主要方法通過修改MVS 框架實現建筑物的深度估計,缺乏對建筑物內在結構的考慮,易導致精度不足等問題。
2024-11-07 10:16:041448 
需要哪些功能,如點云處理、三維建模、數據分析等。 軟件兼容性 :確保軟件能夠與現有的硬件設備兼容,如三維掃描儀、CAD軟件等。 用戶界面 :選擇界面直觀、操作簡便的軟件,以減少學習成本。 技術支持和社區 :選擇有良好技術
2024-12-30 15:05:021451 在三維逆向工程領域,傳統方法在處理復雜數據和構建高精度模型時面臨諸多挑戰。隨著人工智能(AI)技術的發展,點云降噪算法工具與機器學習建模能力的應用,為三維逆向工程帶來了創新性解決方案,顯著提升
2025-08-20 10:00:00536 
 電子發燒友App
電子發燒友App



 ,則目標點云Y可以分解為
,則目標點云Y可以分解為 。這里我們使用
。這里我們使用 來表示點云中不屬于任何實例的部分,即異常值的集合。多實例三維點云配準的目標是找到將源點云實例X?與每個目標實例點云
來表示點云中不屬于任何實例的部分,即異常值的集合。多實例三維點云配準的目標是找到將源點云實例X?與每個目標實例點云 。如果我們設法獲得源實例和每k個目標實例
。如果我們設法獲得源實例和每k個目標實例 之間的對應關系,則目標點云中第 k 個實例的位姿
之間的對應關系,則目標點云中第 k 個實例的位姿
 這里
這里 用于表示異常值的集合。正如我們所看到的,多實例點云配準不僅需要排除異常對應,還需要解決來自不同實例的對應的歧義。這項任務并不容易,因為所有實例看起來都一樣,并且通常存在許多異常值對應。
用于表示異常值的集合。正如我們所看到的,多實例點云配準不僅需要排除異常對應,還需要解決來自不同實例的對應的歧義。這項任務并不容易,因為所有實例看起來都一樣,并且通常存在許多異常值對應。

 且
且 是兩個真正的對應,它們應該滿足:
是兩個真正的對應,它們應該滿足: 
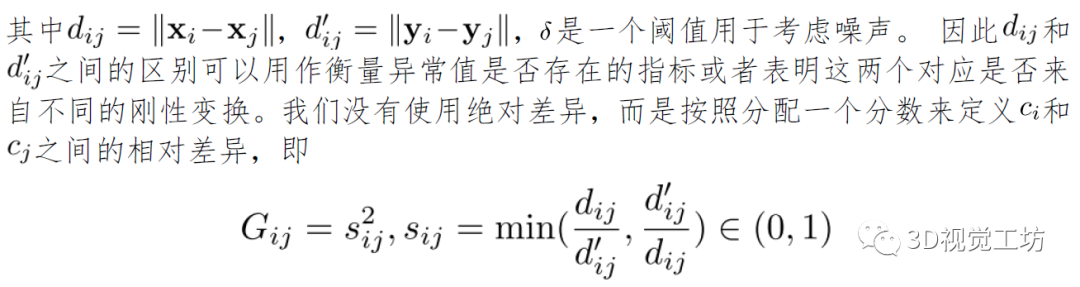
 )。距離不變矩陣是對稱的,其中每一列或每一行都是一個向量,描述了給定對應關系和其他對應關系之間的兼容性。 我們將列向量
)。距離不變矩陣是對稱的,其中每一列或每一行都是一個向量,描述了給定對應關系和其他對應關系之間的兼容性。 我們將列向量 命名為對應ci的兼容性向量。我們觀察到,如果兩個對應關系屬于同一個實例,則它們的兼容性向量具有相似的模式。考慮兩個對應關系
命名為對應ci的兼容性向量。我們觀察到,如果兩個對應關系屬于同一個實例,則它們的兼容性向量具有相似的模式。考慮兩個對應關系 。對于任何對應
。對于任何對應 ,由于距離不變性,我們有
,由于距離不變性,我們有 ,
, 。對于其他對應關系
。對于其他對應關系 ,我們很可能有
,我們很可能有 ,
,  。換句話說,
。換句話說, 有相似的0-1模式。相比之下,如果這兩個對應關系屬于不同的實例,那么它們的兼容性向量就會非常不同。為了更好地理解這一觀察結果,我們在圖2 中給出了一個簡單的示例。 對應的兼容性向量可以被視為該對應的特征表示。屬于同一剛性變換的對應具有相似的特征。因此,基于這些兼容性向量,我們可以將這些對應關系聚類到不同組中,每個組來自不同的實例或者屬于異常值。
有相似的0-1模式。相比之下,如果這兩個對應關系屬于不同的實例,那么它們的兼容性向量就會非常不同。為了更好地理解這一觀察結果,我們在圖2 中給出了一個簡單的示例。 對應的兼容性向量可以被視為該對應的特征表示。屬于同一剛性變換的對應具有相似的特征。因此,基于這些兼容性向量,我們可以將這些對應關系聚類到不同組中,每個組來自不同的實例或者屬于異常值。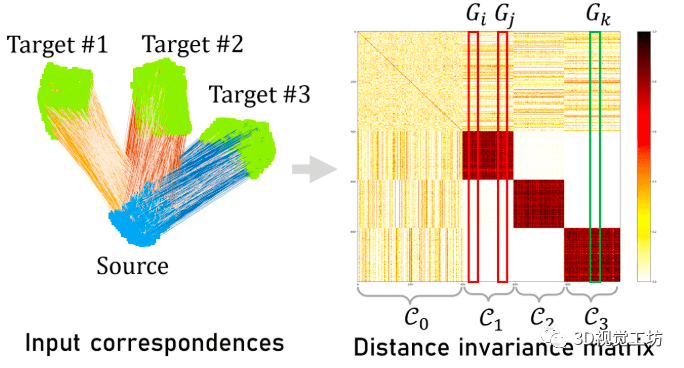
 ,
, 表示第i個和第j個對應的兼容性向量,它們都在實例中。我們觀察到
表示第i個和第j個對應的兼容性向量,它們都在實例中。我們觀察到 顯著不同,因為第k個對應在不同的實例
顯著不同,因為第k個對應在不同的實例 內。這里
內。這里 代表異常值的集合。 二、快速對應關系聚類 我們以自下而上的方式對對應進行聚類,這比現有的譜聚類方法要快得多。一開始,每個對應都被視為一個單獨的類,然后重復合并距離最小的兩個類,直到兩類之間的最小距離大于給定閾值。定義類之間距離的方式會產生不同的算法。這里定義距離如下。設
代表異常值的集合。 二、快速對應關系聚類 我們以自下而上的方式對對應進行聚類,這比現有的譜聚類方法要快得多。一開始,每個對應都被視為一個單獨的類,然后重復合并距離最小的兩個類,直到兩類之間的最小距離大于給定閾值。定義類之間距離的方式會產生不同的算法。這里定義距離如下。設  為類i和j的表示向量,類間距離定義為
為類i和j的表示向量,類間距離定義為
 更新,其中
更新,其中 表示對兩個向量的每個維度取最小值。在聚類開始時,將一類(僅包含一個對應)的表示向量設置為該對應的兼容性向量。
表示對兩個向量的每個維度取最小值。在聚類開始時,將一類(僅包含一個對應)的表示向量設置為該對應的兼容性向量。 其中表示第次迭代,N是對應的數量,是舍入取整操作。我們在實驗中設置
其中表示第次迭代,N是對應的數量,是舍入取整操作。我們在實驗中設置 和
和 。在我們的實驗中,細化過程通常在三個迭代內收斂,因此它也是高效的。
。在我們的實驗中,細化過程通常在三個迭代內收斂,因此它也是高效的。 和
和 ,我們計算每個對應的對齊誤差,即
,我們計算每個對應的對齊誤差,即 接下來,如果
接下來,如果 ,我們設置
,我們設置 ,否則設置
,否則設置 。因此,我們為兩個轉換獲得了兩個二元集合
。因此,我們為兩個轉換獲得了兩個二元集合 。合并兩個變換的標準是
。合并兩個變換的標準是  如果滿足此標準,我們將丟棄具有更多異常值的其中一個變換。然后,我們根據所有變換中對齊誤差最小的一個,將簇標簽重新分配給每個對應。
如果滿足此標準,我們將丟棄具有更多異常值的其中一個變換。然后,我們根據所有變換中對齊誤差最小的一個,將簇標簽重新分配給每個對應。 其中
其中 表示第k次剛性變換的內點對應數。如果,我們忽略第k個剛性變換之后的所有變換。這里可以更改閾值以在召回率和精度之間進行權衡。
表示第k次剛性變換的內點對應數。如果,我們忽略第k個剛性變換之后的所有變換。這里可以更改閾值以在召回率和精度之間進行權衡。




 工商網監
工商網監
評論