") 徹底搞懂基于Open3D的點(diǎn)云處理教程!
徹底搞懂基于Open3D的點(diǎn)云處理教程!

背景介紹 點(diǎn)云數(shù)據(jù)是三維感知的重要手段,具有豐富的幾何與結(jié)構(gòu)信息,在自動(dòng)駕駛、地形測(cè)繪、工業(yè)測(cè)量等領(lǐng)域具有廣泛的應(yīng)用。同時(shí)點(diǎn)云數(shù)據(jù)處理技術(shù)也是目前比較火熱的研究方向,并且隨著深度學(xué)習(xí)的發(fā)展,結(jié)合深度學(xué)習(xí)的點(diǎn)云方法非常具有潛力。
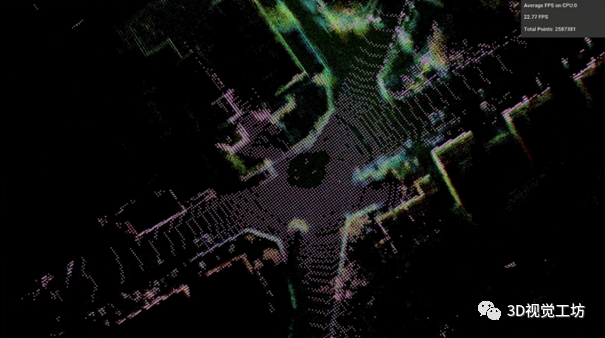
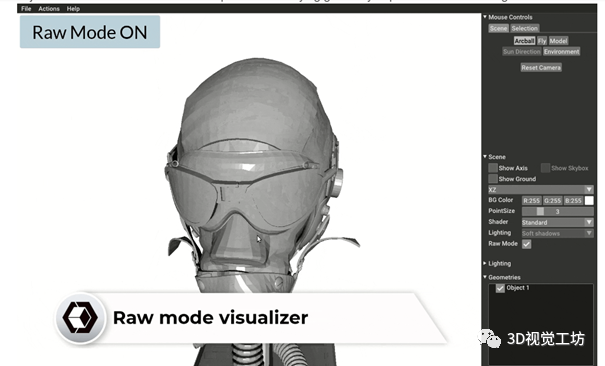
目前針對(duì)點(diǎn)云的第三方庫(kù)有很多種,如PCL、CGAL等。這些庫(kù)均基于C++進(jìn)行實(shí)現(xiàn)調(diào)用,然而初學(xué)者難以深入掌握C++語(yǔ)言,且網(wǎng)上資料參差不齊,使很多人從入門到放棄。Open3D是2018年開(kāi)始發(fā)展的點(diǎn)云處理庫(kù),底層基于C++實(shí)現(xiàn),提供Python語(yǔ)言的接口調(diào)用。依托于Python的簡(jiǎn)單易學(xué)習(xí)特性,Open3D庫(kù)極易上手,能夠讓你專心的進(jìn)行算法研究而不必過(guò)于擔(dān)心編程技能。本課程依托于Open3D開(kāi)源庫(kù),著重介紹點(diǎn)云數(shù)據(jù)處理的實(shí)戰(zhàn)應(yīng)用。
課程定位
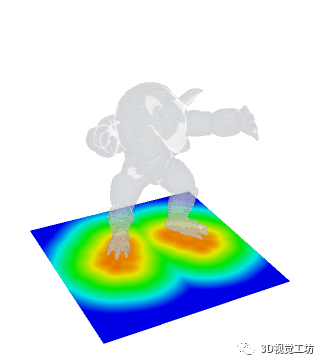
面向點(diǎn)云處理領(lǐng)域的基礎(chǔ)工具課,主要以Python為編程主要語(yǔ)言,介紹Open3D庫(kù)的使用方法。課程特點(diǎn)簡(jiǎn)單易用,快速上手點(diǎn)云數(shù)據(jù)處理,更加側(cè)重于實(shí)戰(zhàn),涉及的話題包括點(diǎn)云的配準(zhǔn)、去噪、采樣、分割等,每個(gè)案例均提供源碼進(jìn)行實(shí)戰(zhàn)。
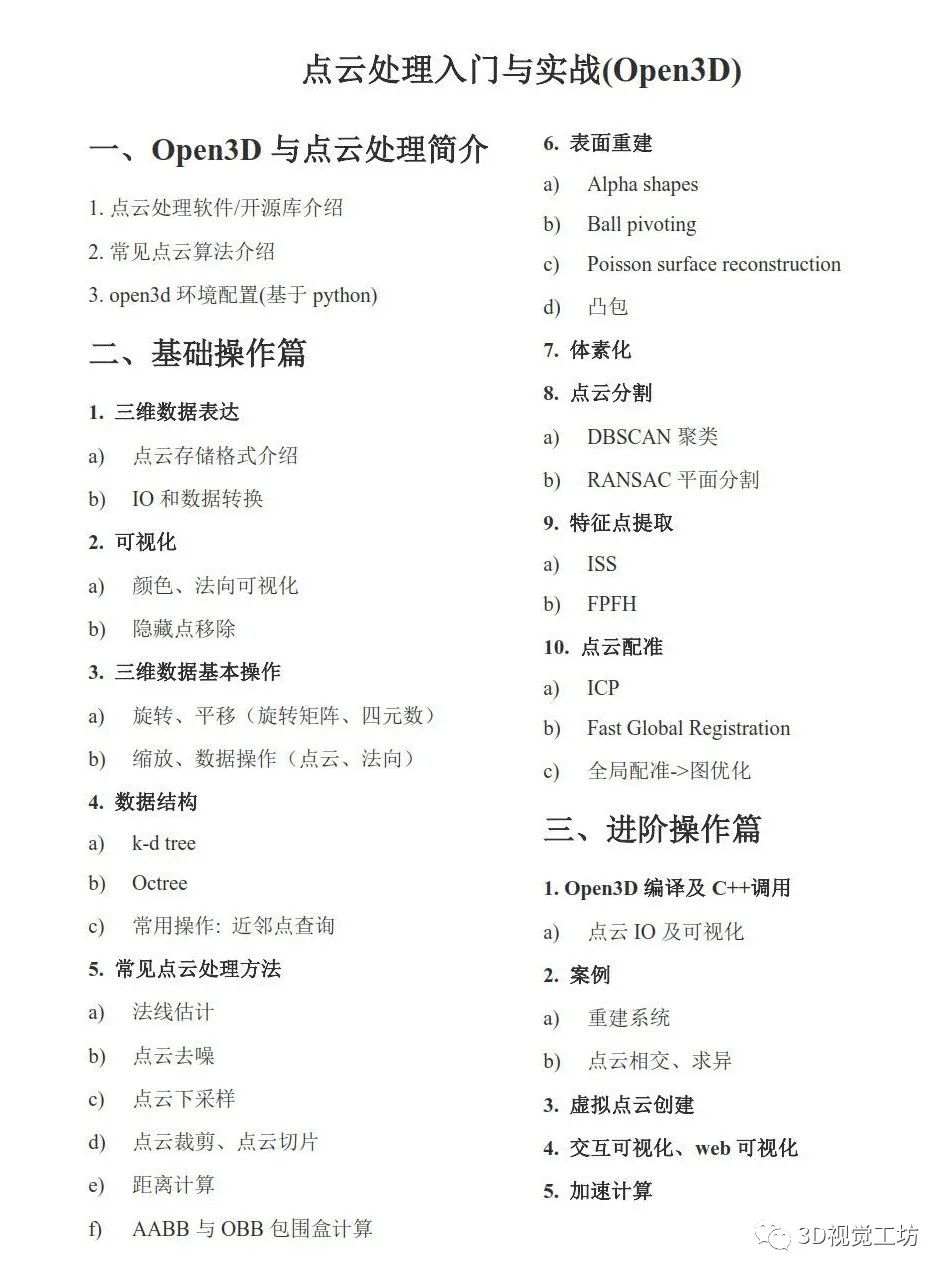
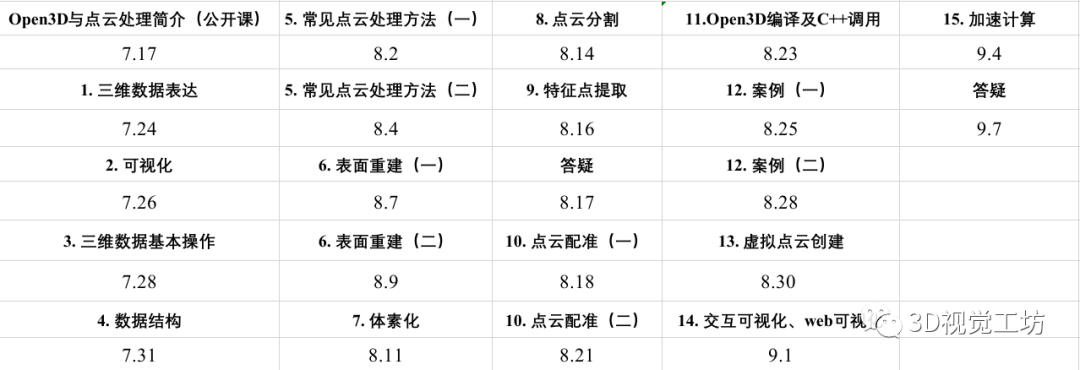
課程大綱
面向人群
1.方向?yàn)辄c(diǎn)云數(shù)據(jù)處理領(lǐng)域的基礎(chǔ)人群,快速上手Open3D進(jìn)行實(shí)戰(zhàn)應(yīng)用;
2.使用python作為點(diǎn)云數(shù)據(jù)處理的主要編程語(yǔ)言;
3.兼顧對(duì)C++ API的概要介紹,便于實(shí)現(xiàn)工業(yè)落地;
講師介紹
李子寬,南京航空航天大學(xué)計(jì)算機(jī)科學(xué)與技術(shù)博士,主要從事激光雷達(dá)數(shù)據(jù)處理與應(yīng)用研究。國(guó)家獎(jiǎng)學(xué)金獲得者,多篇成果物被SCI、EI數(shù)據(jù)庫(kù)收錄。
李虎,資深3D視覺(jué)算法工程師,任職國(guó)內(nèi)某獨(dú)角獸公司,具有豐富的實(shí)戰(zhàn)經(jīng)驗(yàn)。
學(xué)后收獲
1.掌握點(diǎn)云數(shù)據(jù)處理基本理論和方法,掌握常見(jiàn)的點(diǎn)云配準(zhǔn)、分割、聚類手段;
2.快速上手Python編程,培養(yǎng)利用Python進(jìn)行點(diǎn)云處理的編程素養(yǎng),能夠獨(dú)立進(jìn)行算法分析和實(shí)現(xiàn);
3.每節(jié)課均提供代碼實(shí)現(xiàn)和詳細(xì)注釋,提供豐富的工具和輪子,方便進(jìn)行拓展實(shí)現(xiàn);
課程安排
審核編輯 :李倩
-
編程語(yǔ)言
+關(guān)注
關(guān)注
10文章
1964瀏覽量
39575 -
深度學(xué)習(xí)
+關(guān)注
關(guān)注
73文章
5599瀏覽量
124398 -
點(diǎn)云數(shù)據(jù)
+關(guān)注
關(guān)注
0文章
13瀏覽量
1693
原文標(biāo)題:徹底搞懂基于Open3D的點(diǎn)云處理教程!
文章出處:【微信號(hào):3D視覺(jué)工坊,微信公眾號(hào):3D視覺(jué)工坊】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
英倫科技裸眼3D顯示技術(shù)突破:攻克行業(yè)痛點(diǎn),掌握光場(chǎng)技術(shù)話語(yǔ)權(quán)

一文帶你徹底搞懂K8s網(wǎng)絡(luò)
自動(dòng)駕駛模型是如何“看”懂點(diǎn)云信息的?

iSUN3D即將推出單組分彈性樹脂3D打印解決方案!

【CIE全國(guó)RISC-V創(chuàng)新應(yīng)用大賽】+基于MUSE Pi Pro的3d激光里程計(jì)實(shí)現(xiàn)
Zivid3D相機(jī)安裝使用教程

AI 驅(qū)動(dòng)三維逆向:點(diǎn)云降噪算法工具與機(jī)器學(xué)習(xí)建模能力的前沿應(yīng)用

光子精密雙目3D線激光輪廓測(cè)量?jī)x,擺脫視覺(jué)盲區(qū),1臺(tái)更比2臺(tái)強(qiáng)!
HarmonyOS5云服務(wù)技術(shù)分享--云存儲(chǔ)指南
自動(dòng)駕駛中常提的“點(diǎn)云”是個(gè)啥?

告別漫長(zhǎng)等待! 3D測(cè)量竟然可以如此的絲滑

KW3-24D24E3R3 KW3-24D24E3R3

KW3-24D24ER3 KW3-24D24ER3
一種以圖像為中心的3D感知模型BIP3D

3分鐘讀懂 | 氣密性檢測(cè)儀如何&quot;揪出&quot;泄漏點(diǎn)?原理全拆解!




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論