") 3D的感知技術(shù)及實(shí)踐
3D的感知技術(shù)及實(shí)踐



3D濾波、噪聲過(guò)濾和表面平滑
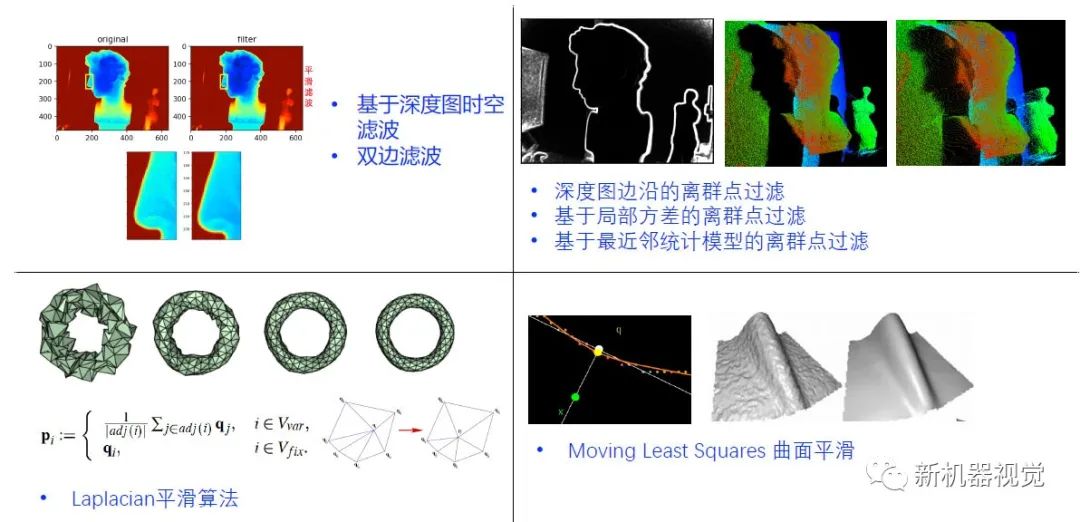
3D信號(hào)處理——深度圖平滑濾波
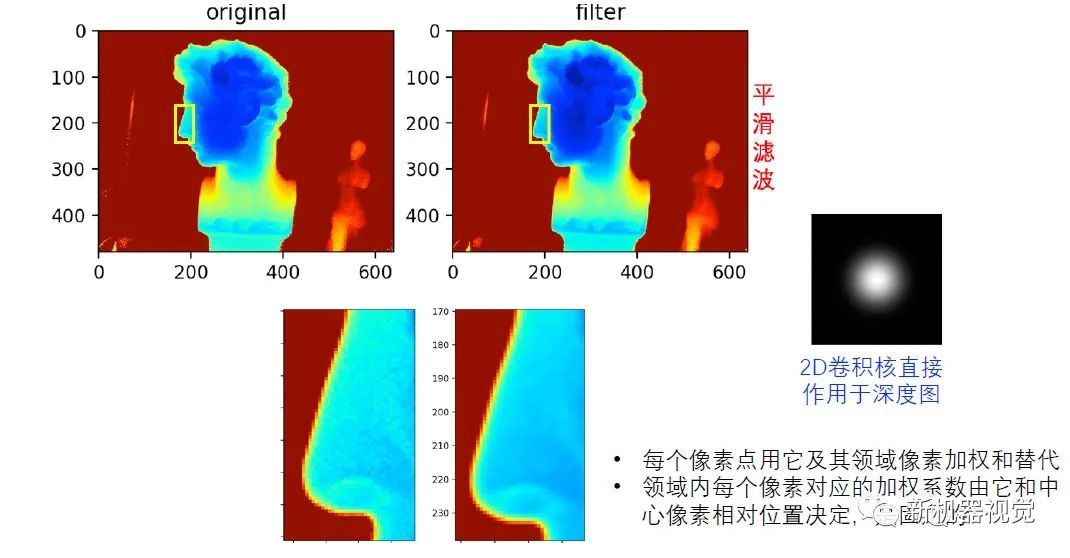
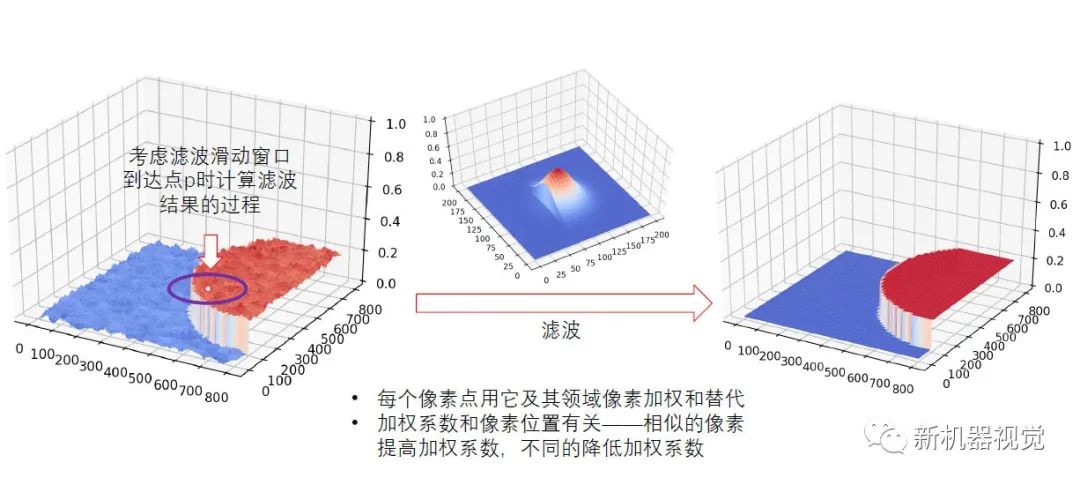
3D信號(hào)處理——深度圖的雙邊濾波
3D信號(hào)處理——表面平滑(三角網(wǎng)格表述的曲面)
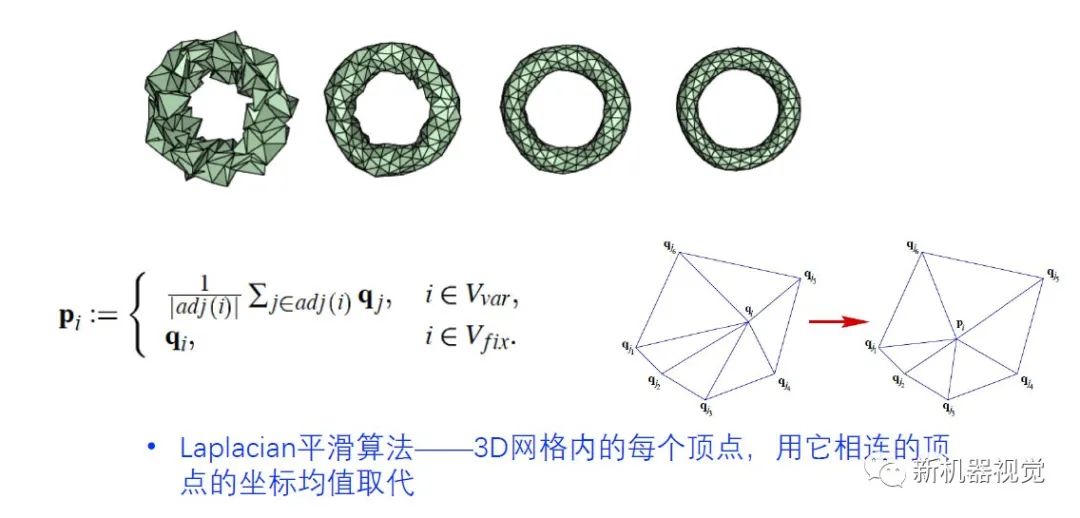
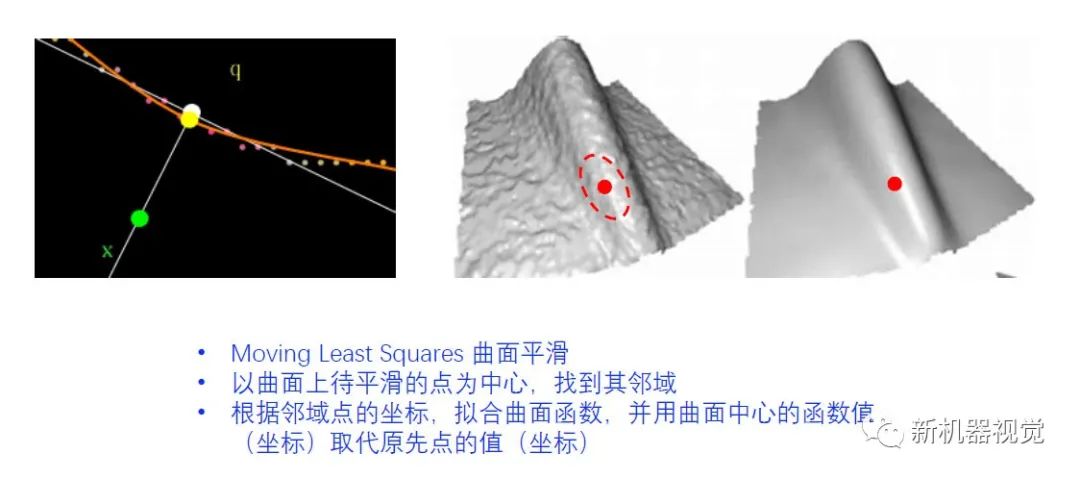
3D信號(hào)處理——表面平滑
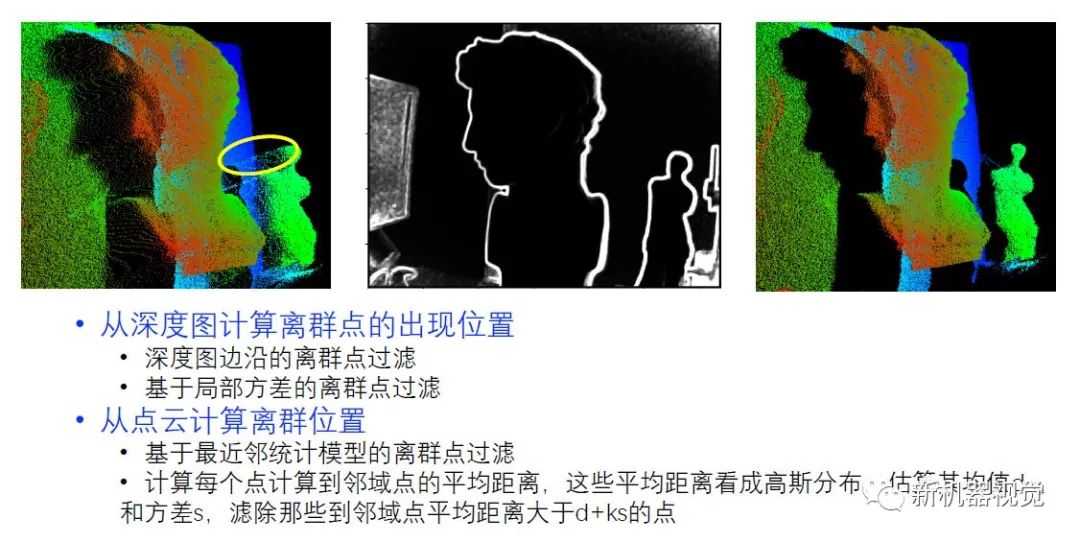
3D信號(hào)處理——離群點(diǎn)過(guò)濾
幾何測(cè)量與建模
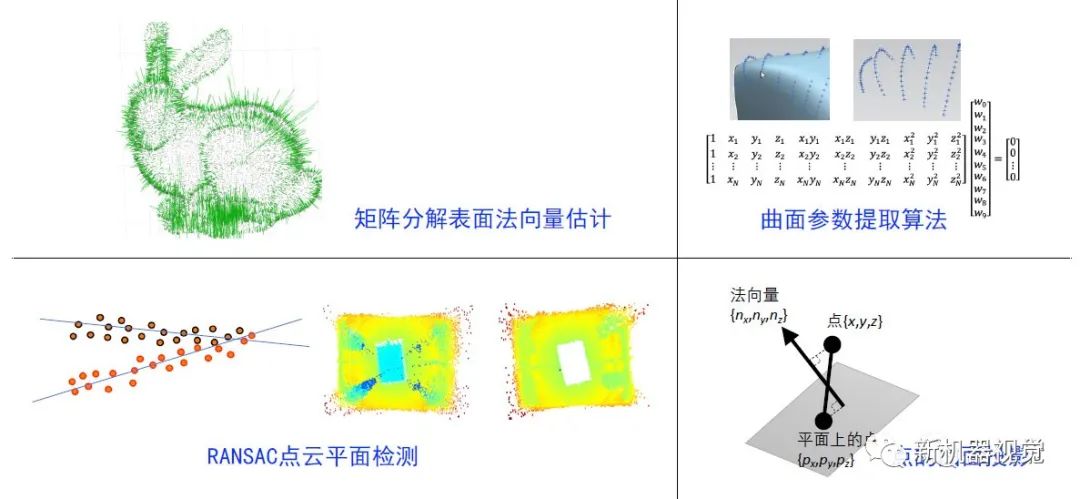
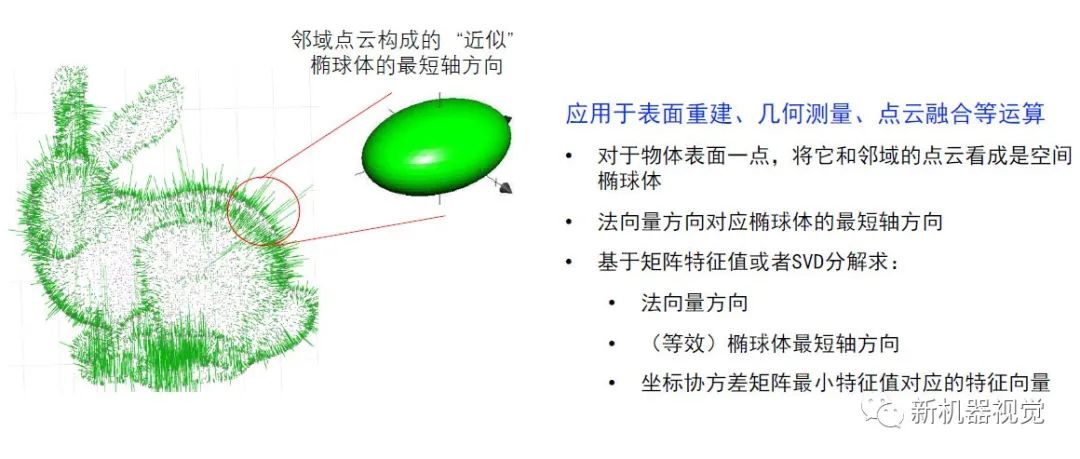
幾何測(cè)量——表面法向量估計(jì)
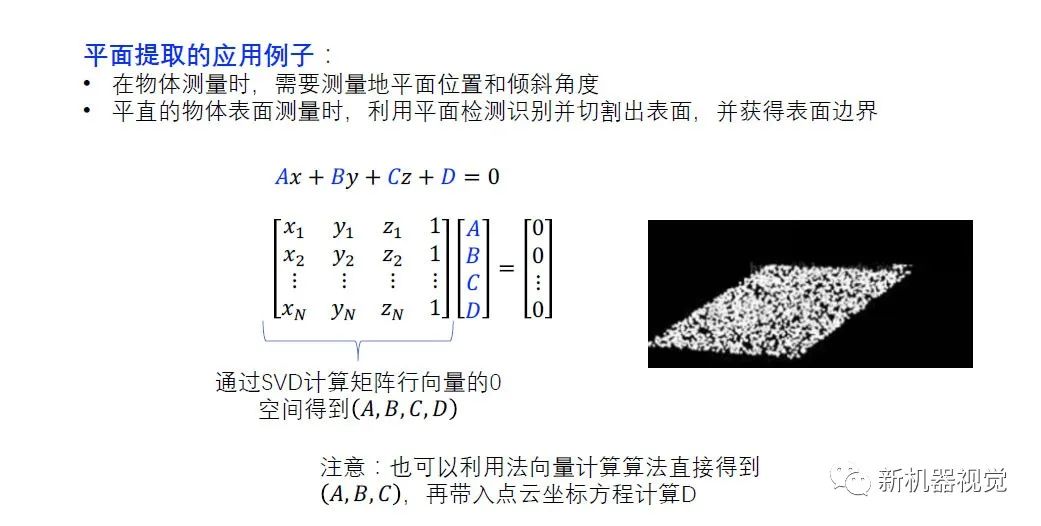
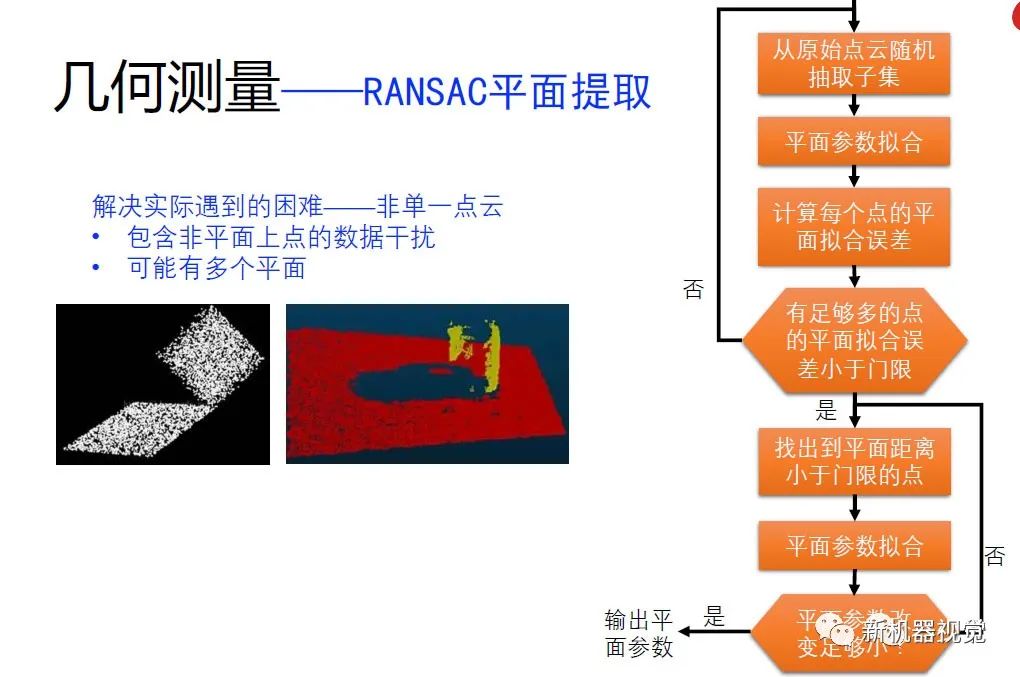
幾何測(cè)量——平面提取
3D重建——從離散點(diǎn)云得到光滑曲面
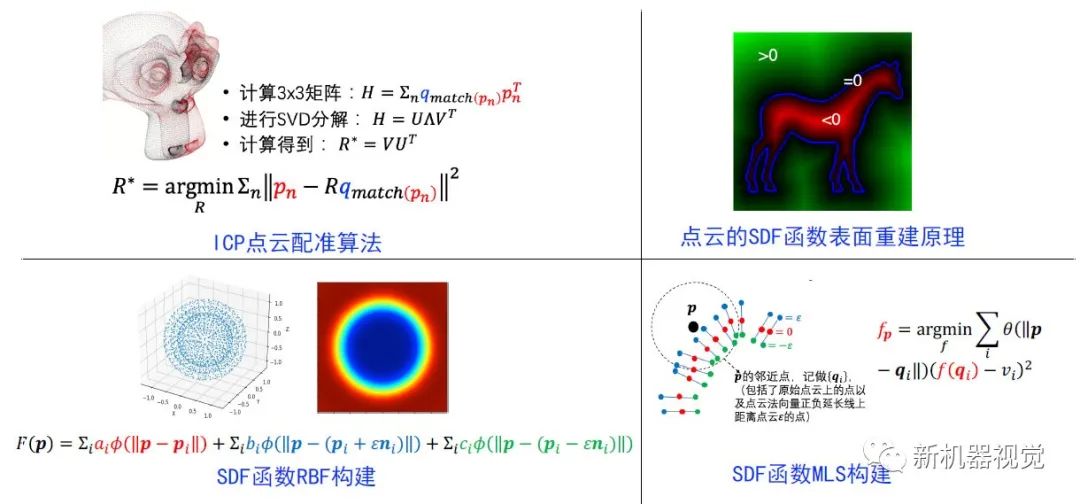
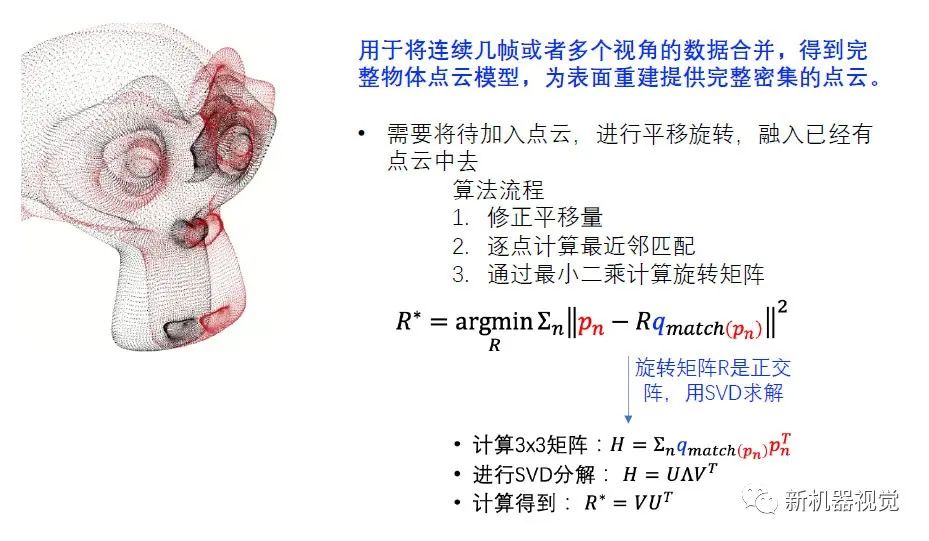
3D重建——ICP點(diǎn)云配準(zhǔn)
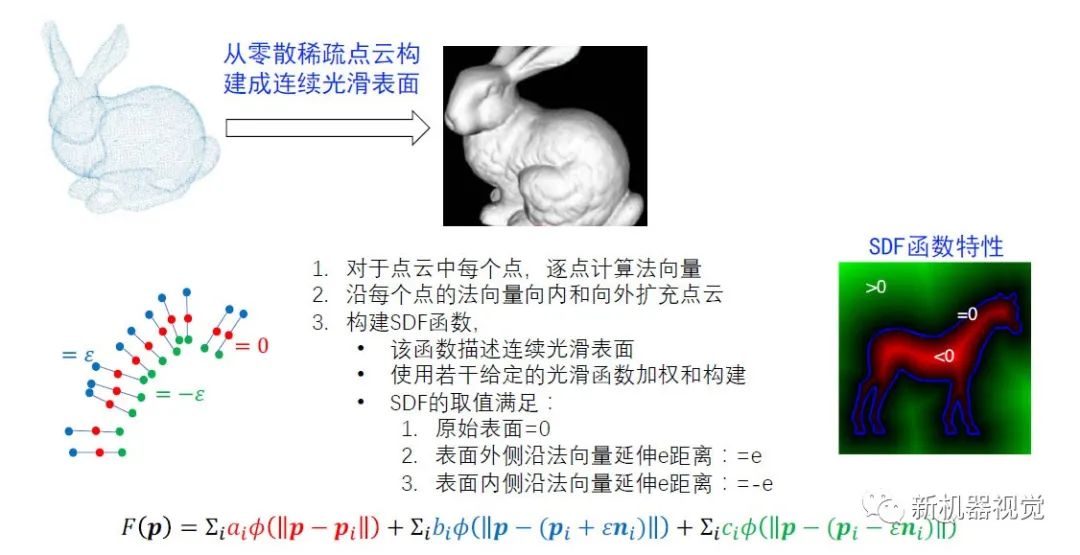
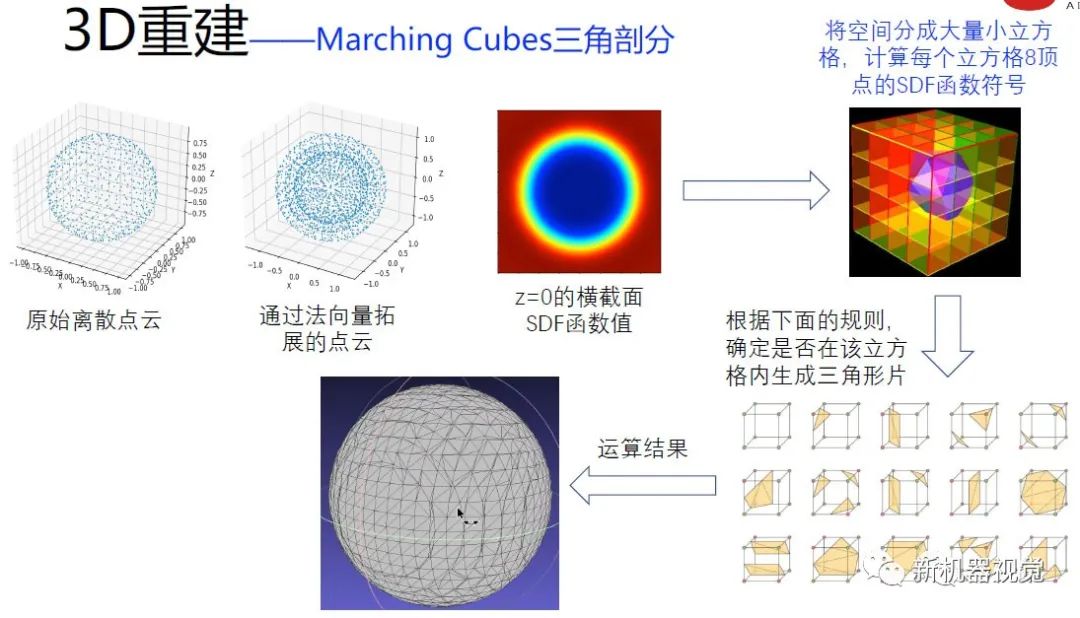
3D重建——SDF表面重建
應(yīng)用例子:從稀疏的點(diǎn)云中,構(gòu)造出可以3D打印的模型
3D物體分割、識(shí)別與測(cè)量
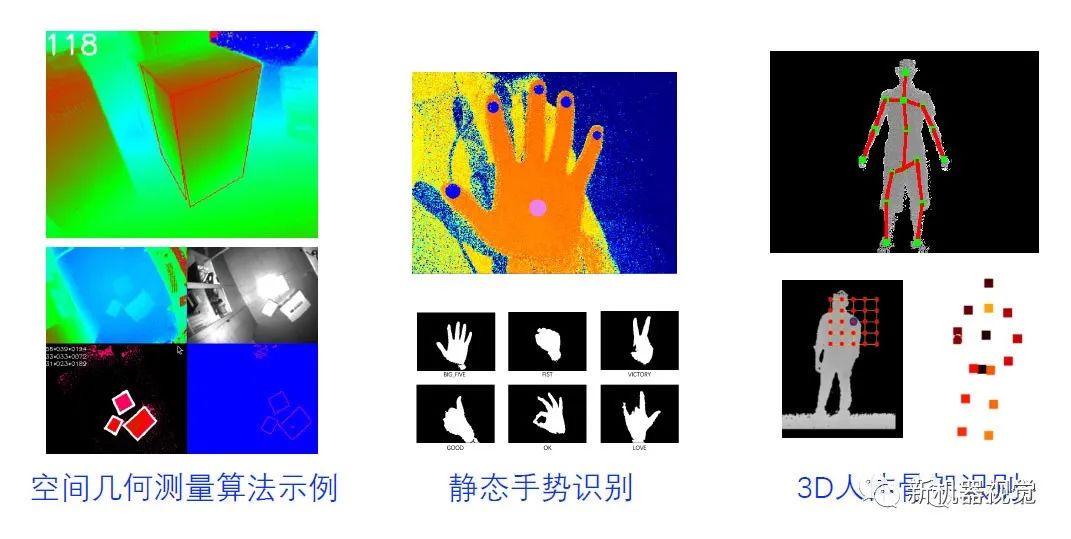
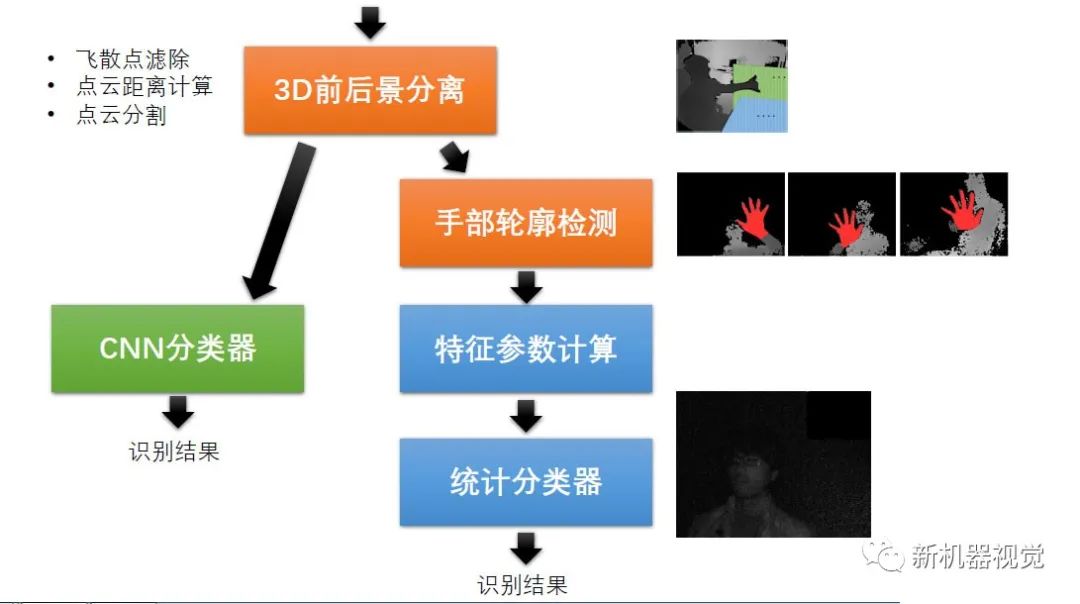
應(yīng)用算法流程——3D物體分割、識(shí)別與測(cè)量

應(yīng)用算法流程——靜態(tài)手勢(shì)識(shí)別
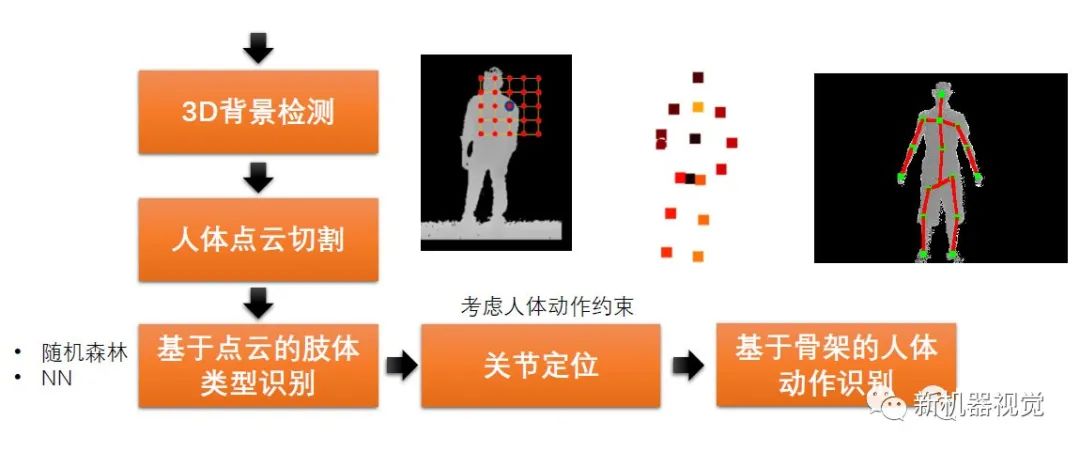
應(yīng)用算法流程——人體動(dòng)作識(shí)別
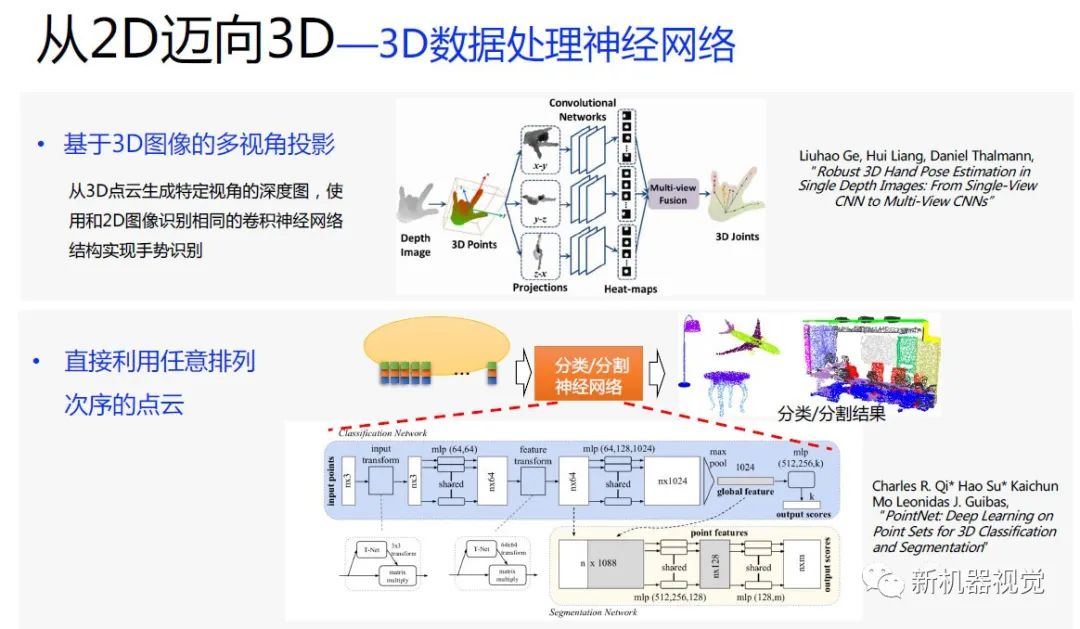
基于神經(jīng)網(wǎng)絡(luò)的3D識(shí)別——兩個(gè)路線方向
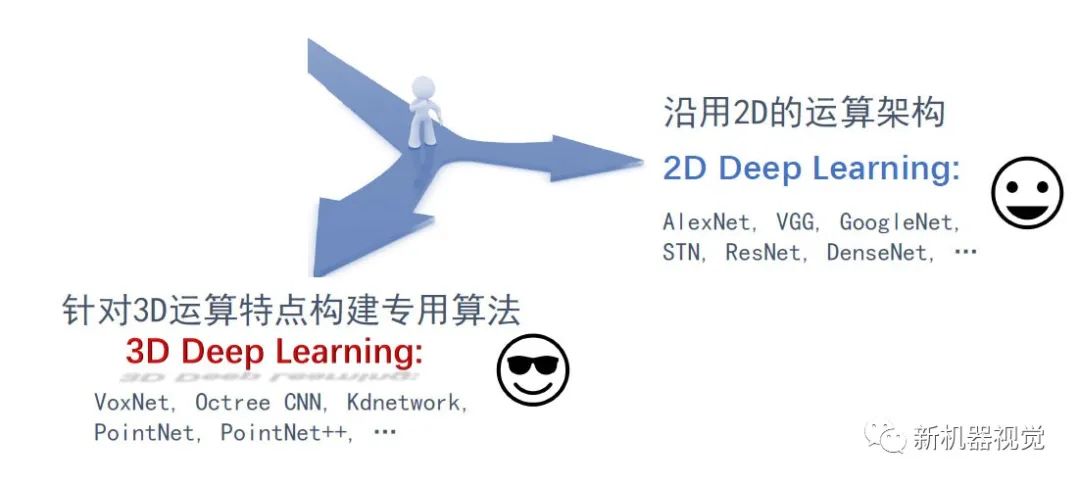
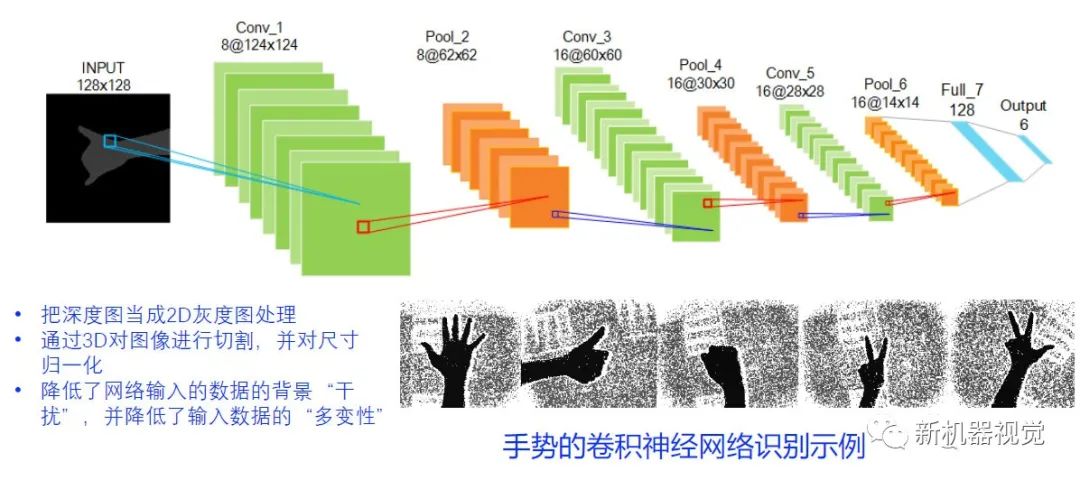
基于神經(jīng)網(wǎng)絡(luò)的3D識(shí)別——深度圖作為2D灰度圖使用
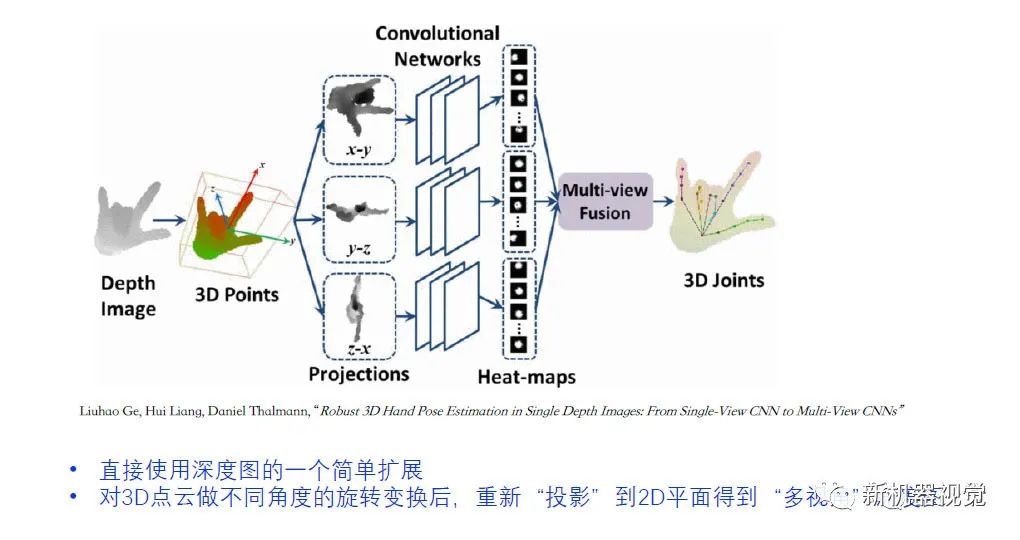
基于神經(jīng)網(wǎng)絡(luò)的3D識(shí)別——多視角深度圖神經(jīng)網(wǎng)絡(luò)
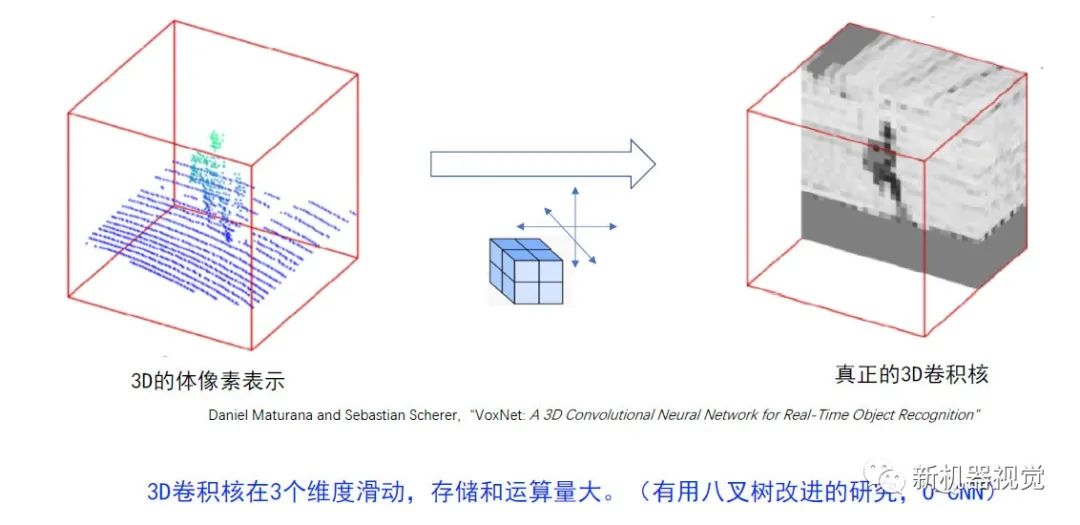
基于神經(jīng)網(wǎng)絡(luò)的3D識(shí)別——體像素3D卷積
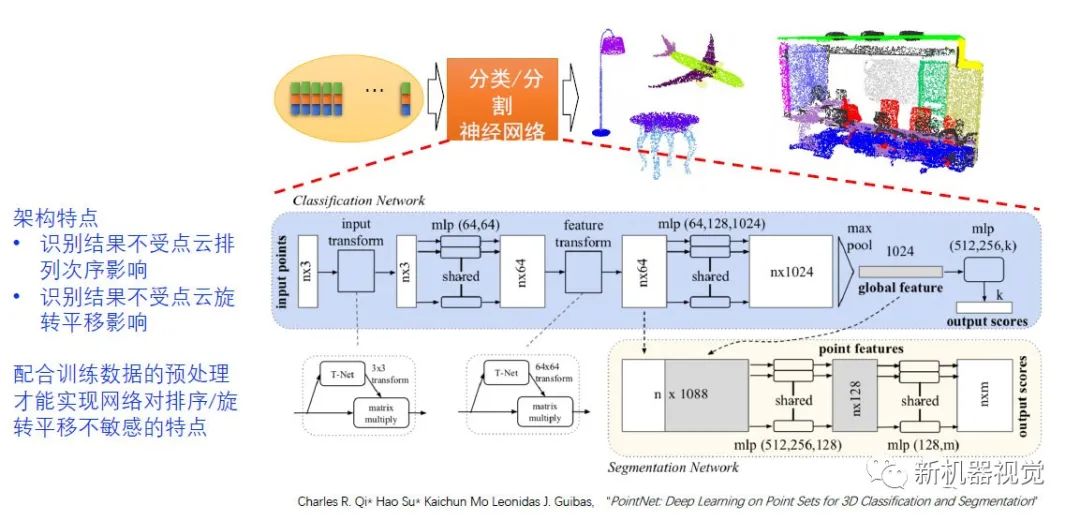
基于神經(jīng)網(wǎng)絡(luò)的3D識(shí)別——點(diǎn)云神經(jīng)網(wǎng)絡(luò)
圖卷積與神經(jīng)網(wǎng)絡(luò)
? 3D傳感器
不同技術(shù)的特點(diǎn)比較和典型應(yīng)用
? 3D數(shù)據(jù)表示方法
多種3D數(shù)據(jù)的表示方法以及相互轉(zhuǎn)換算法
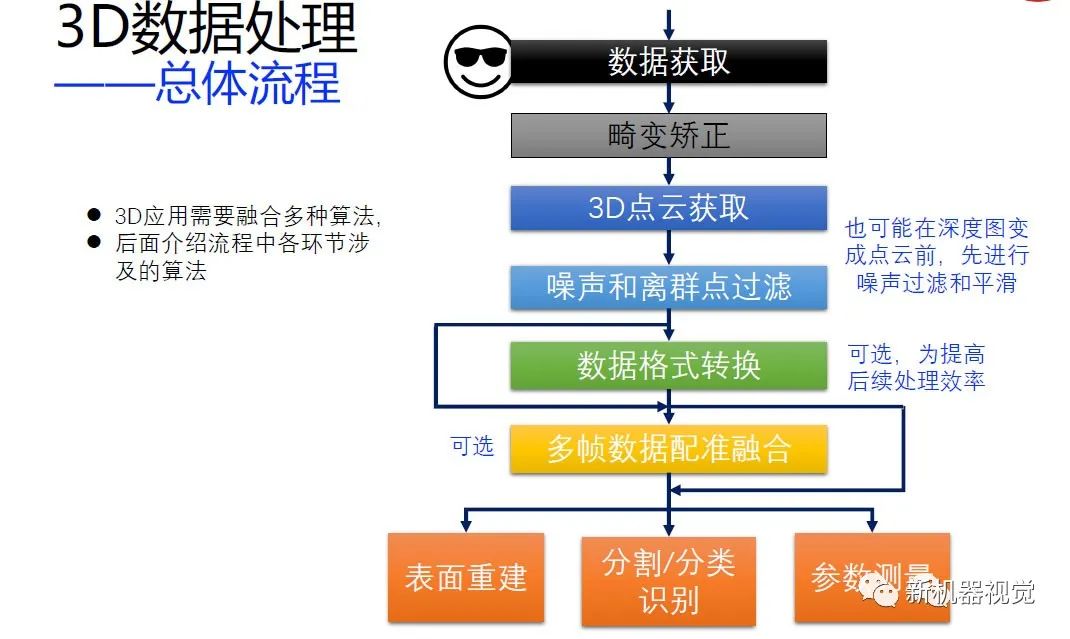
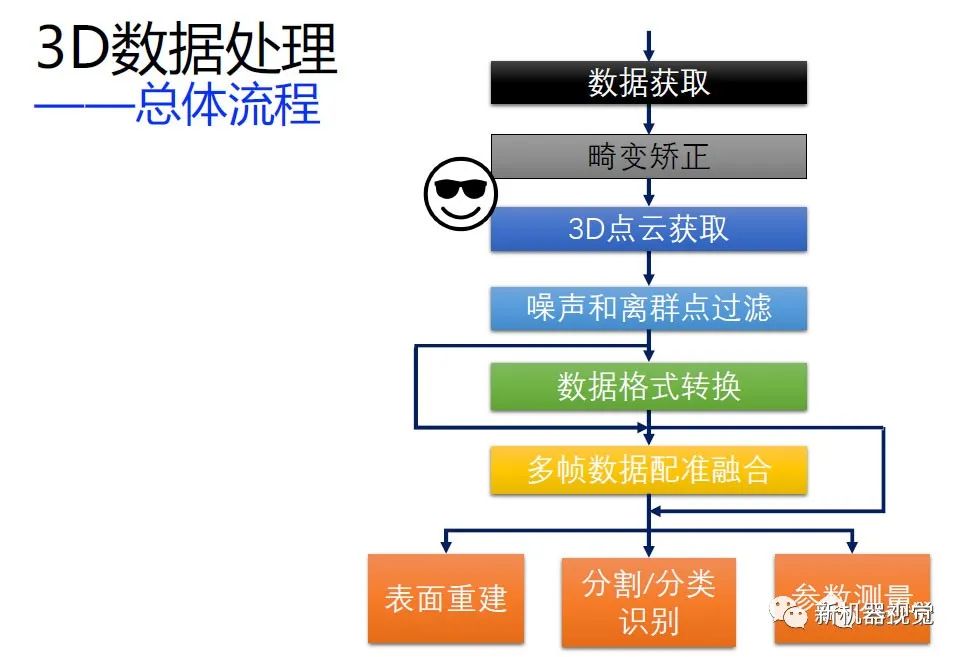
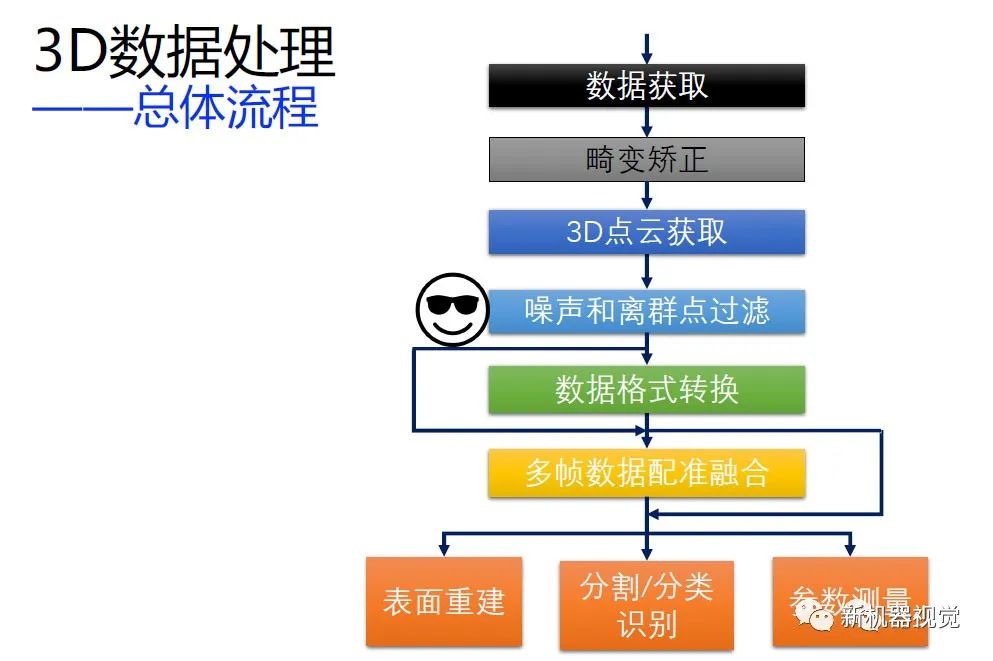
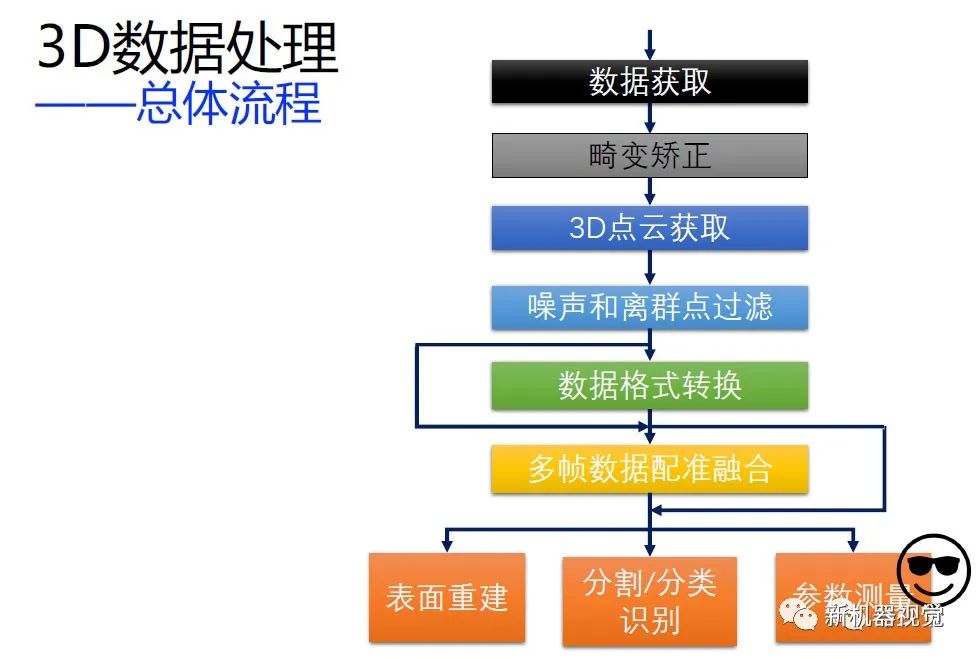
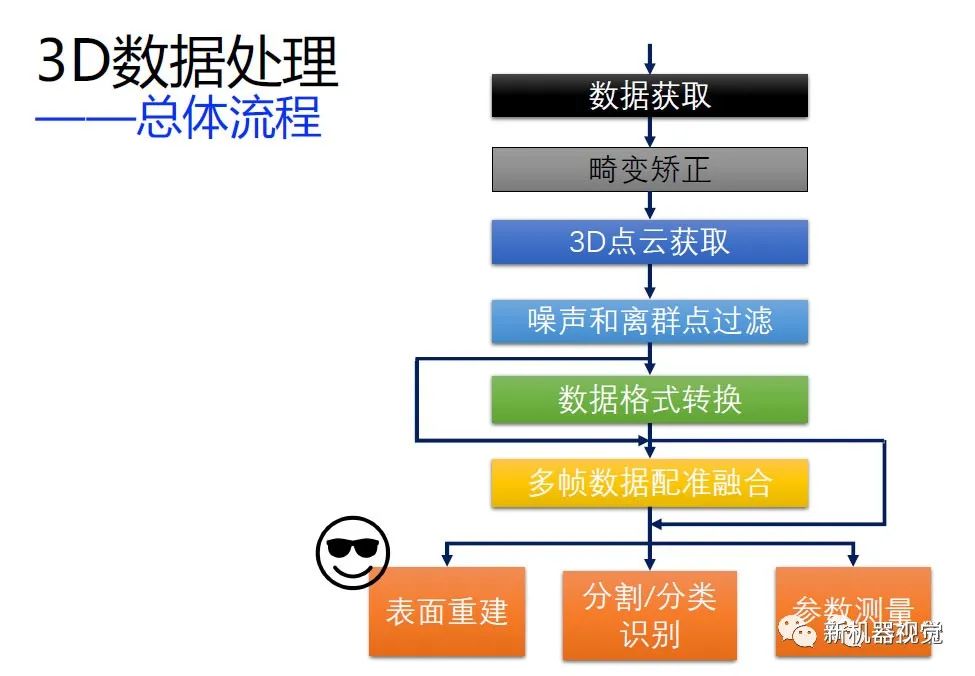
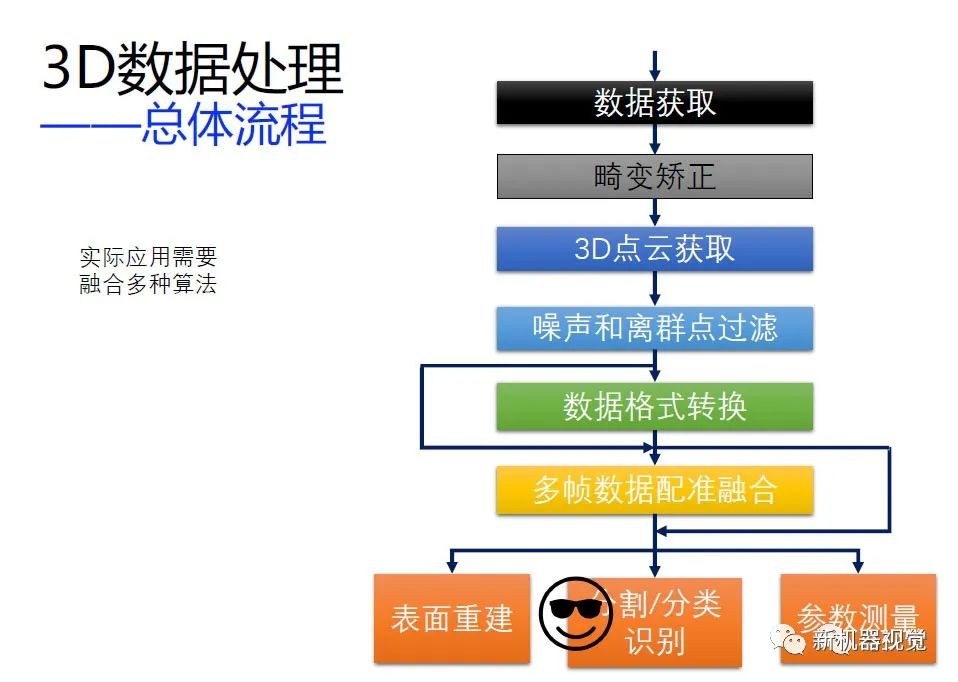
? 3D數(shù)據(jù)處理
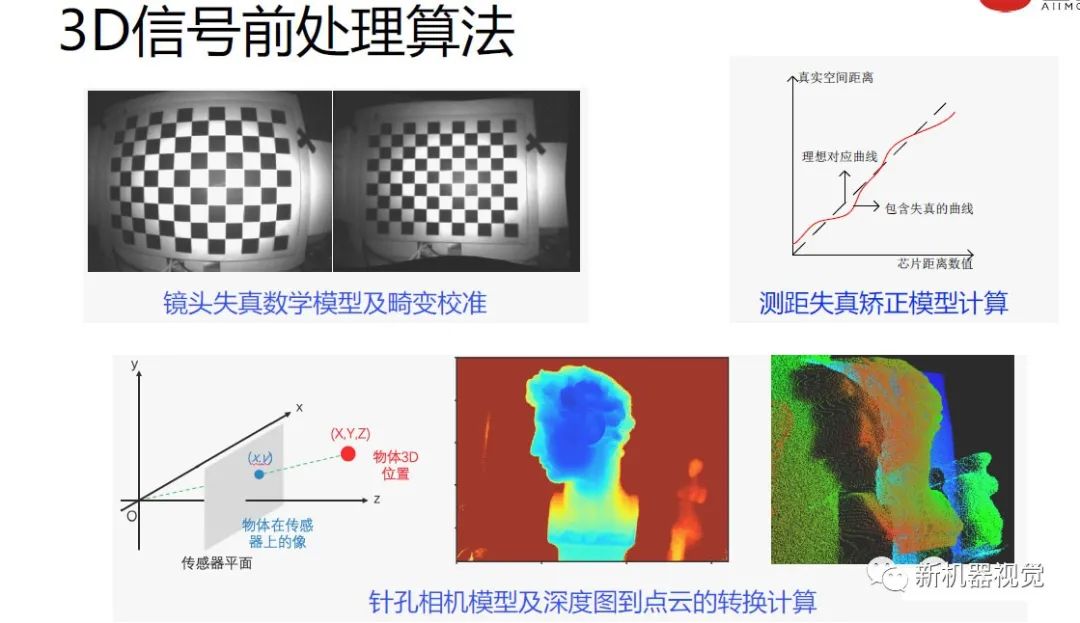
分析實(shí)際的3D傳感器數(shù)據(jù)特性,并介紹不同的處理算法
? 3D幾何測(cè)量與建模
從3D數(shù)據(jù)中提取幾何參數(shù),用于物體測(cè)量和分析
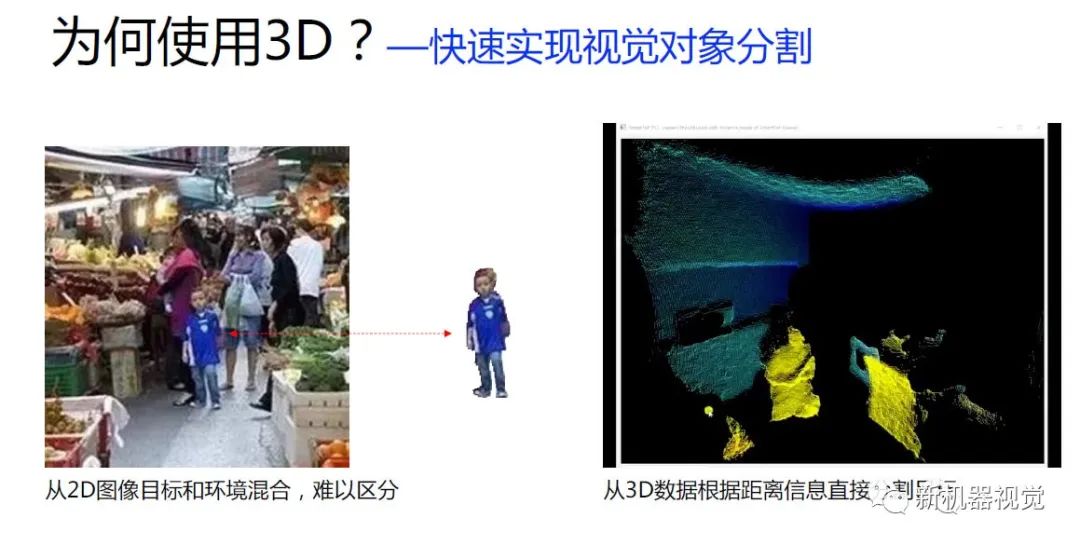
? 3D物體分割與識(shí)別
靜態(tài)物體的特征提取和統(tǒng)計(jì)分析,利用特征數(shù)據(jù)實(shí)現(xiàn)3D對(duì)象的識(shí)別和分割
? 3D活體檢測(cè)與動(dòng)作識(shí)別
生物特征提取和識(shí)別應(yīng)用
? 高級(jí)算法和數(shù)據(jù)處理
基于3D數(shù)據(jù)的機(jī)器學(xué)習(xí)算法以及更復(fù)雜的底層數(shù)據(jù)處理算法介紹
3D測(cè)量
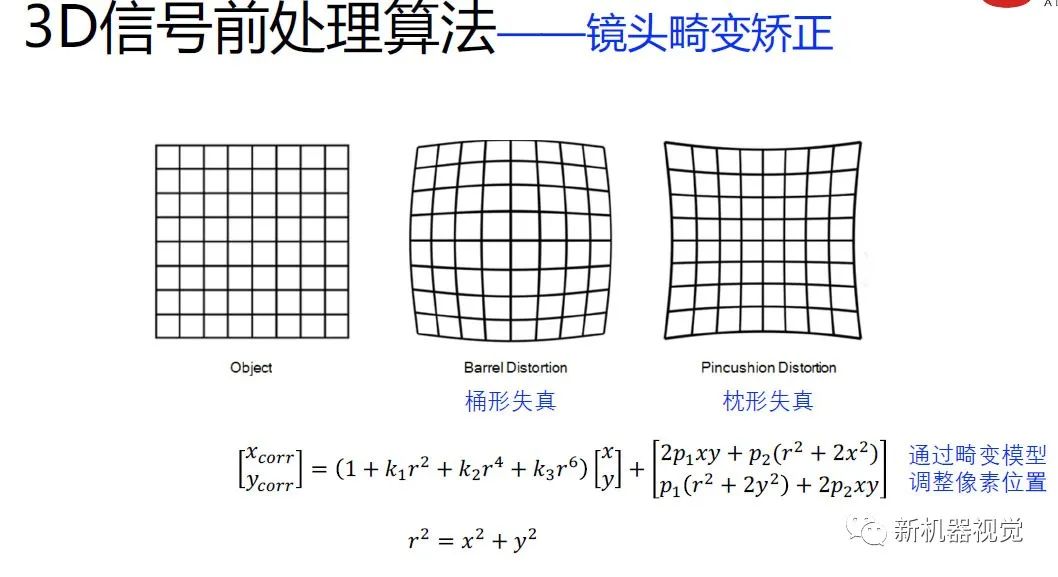
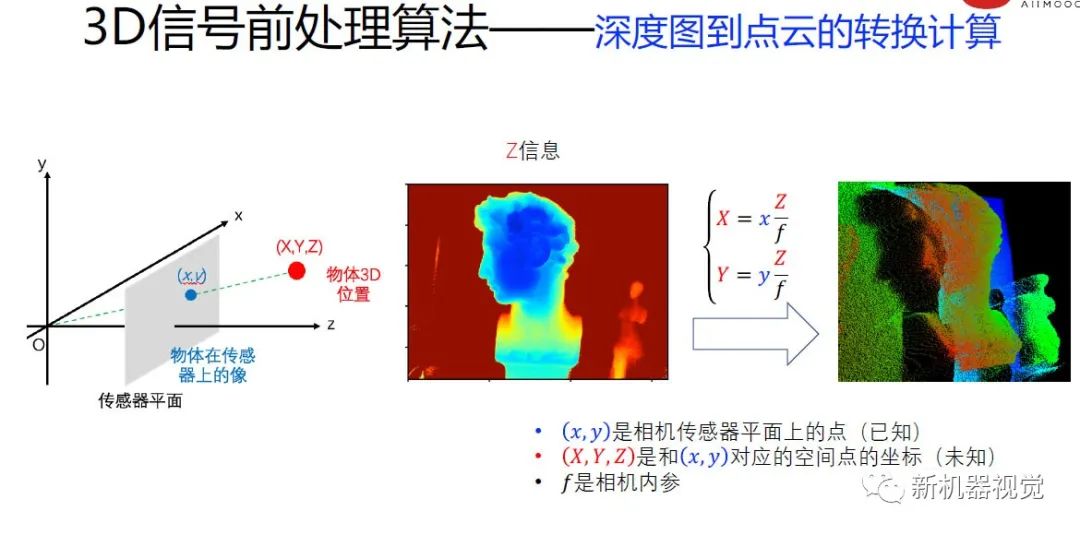
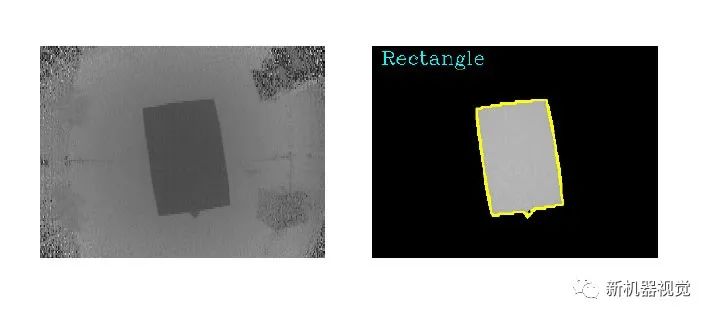
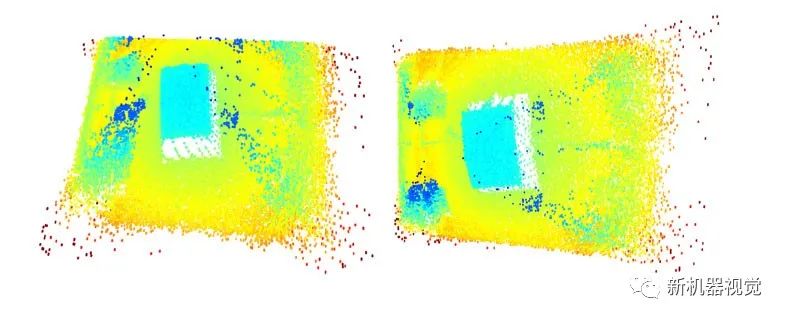
? 將提供的深度圖數(shù)據(jù)轉(zhuǎn)換成3D點(diǎn)云,識(shí)別其中的立方體并測(cè)量尺寸信息。所處理的數(shù)據(jù)包括靜態(tài)幾何體測(cè)量和運(yùn)動(dòng)物體測(cè)量。需要通過(guò)使用學(xué)到的3D數(shù)據(jù)處理算法解決實(shí)際數(shù)據(jù)中的噪聲、圖像畸變等問(wèn)題
幾何體識(shí)別
? 從提供的深度圖數(shù)據(jù)識(shí)別特定視角或者不同視角下的不同類(lèi)型的幾何體,并實(shí)現(xiàn)3D點(diǎn)云分割
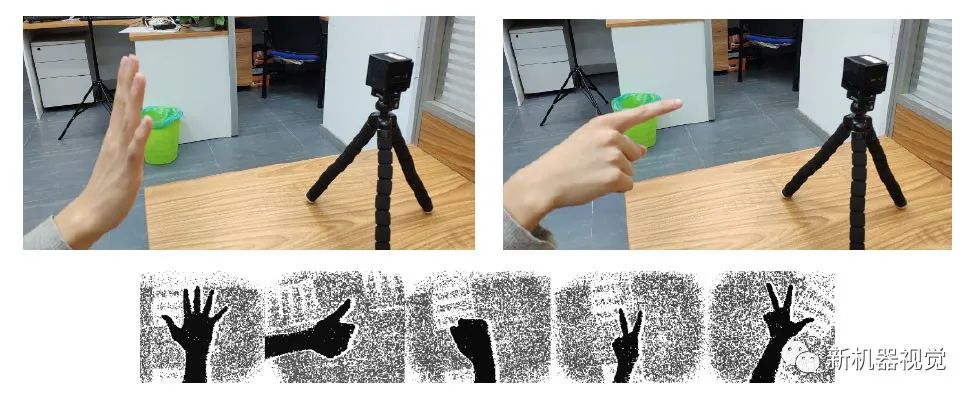
基于深度圖數(shù)據(jù)的手勢(shì)識(shí)別
? 使用提供的深度圖數(shù)據(jù),通過(guò)3D特征提取,實(shí)現(xiàn)手勢(shì)識(shí)別算法,識(shí)別出指定的靜態(tài)和動(dòng)態(tài)手勢(shì)
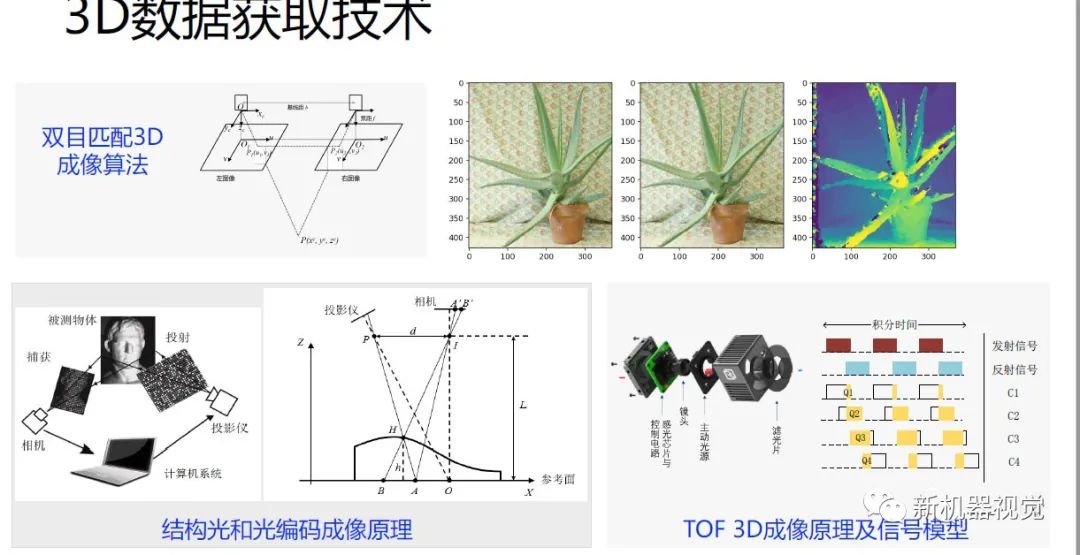
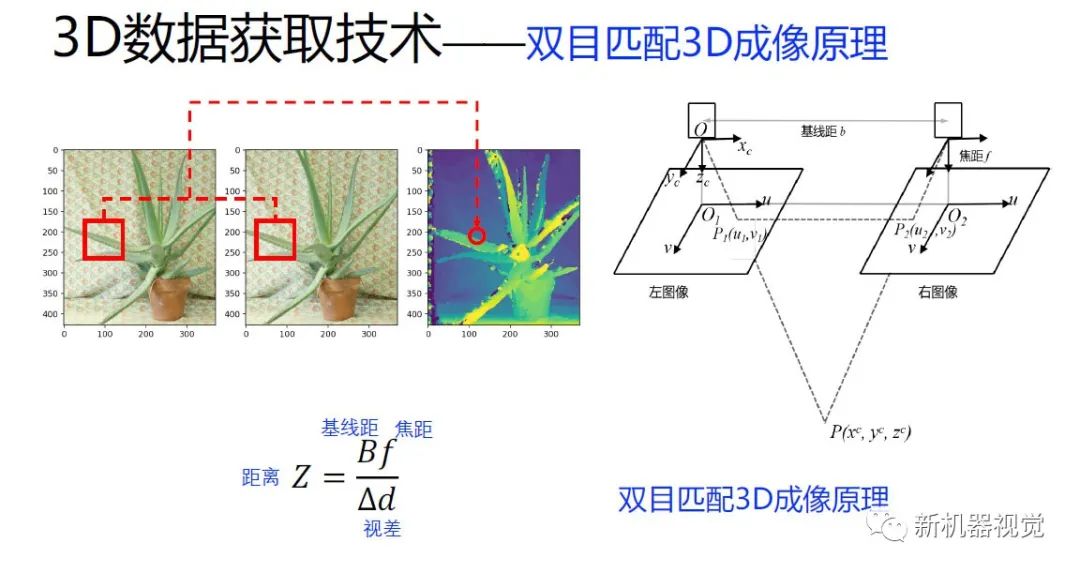
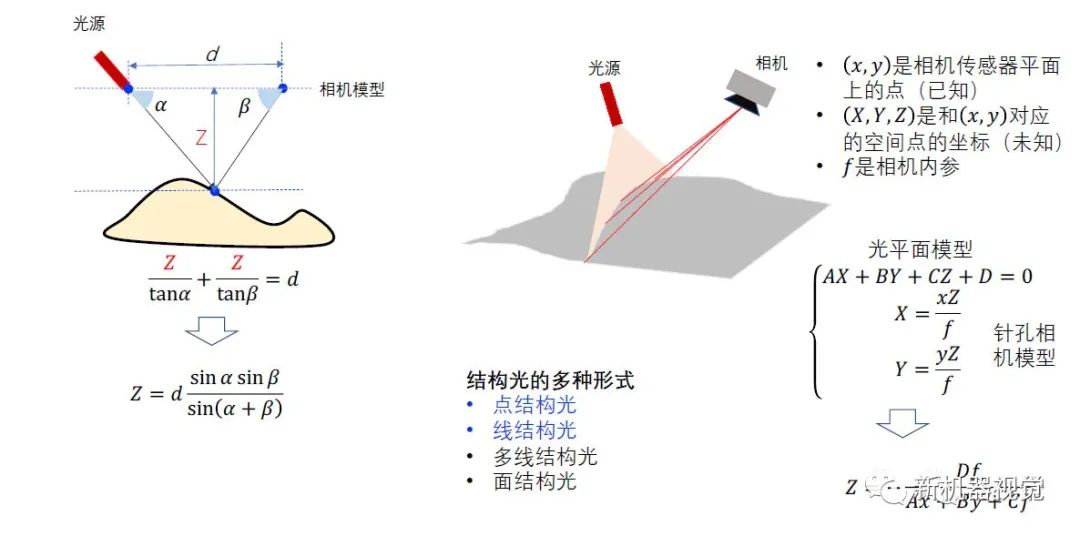
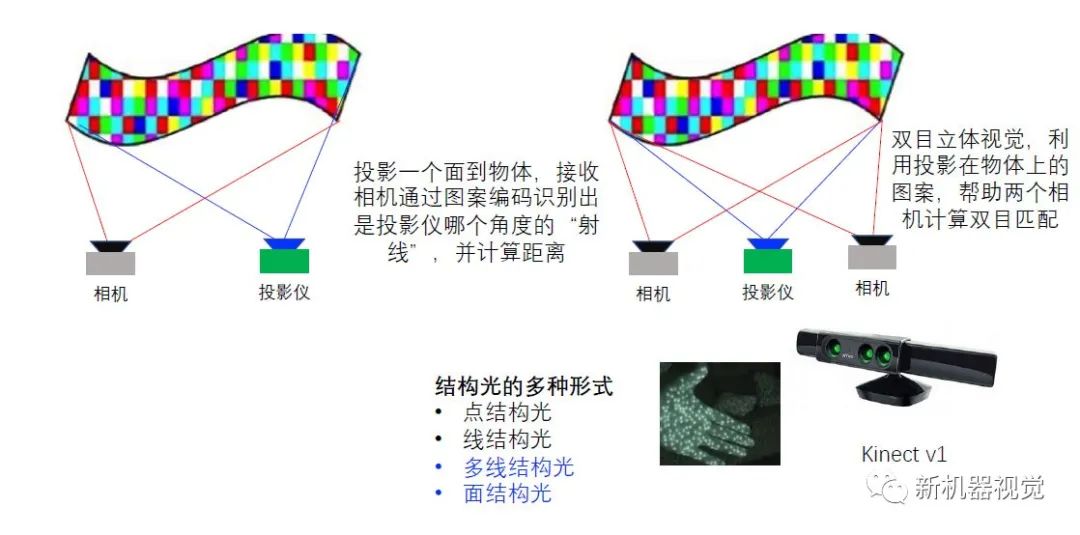
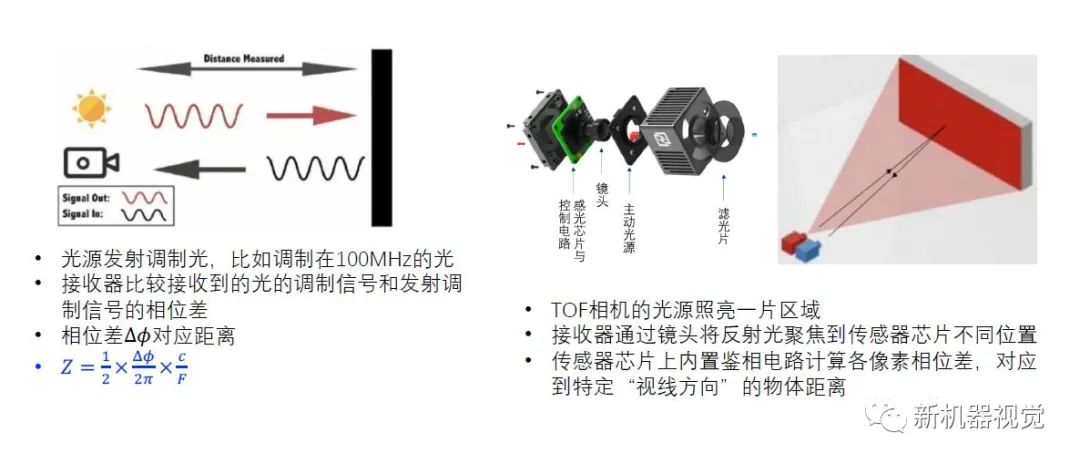
? 了解ToF深度相機(jī)、結(jié)構(gòu)光深度相機(jī)、RGB雙目等多種3D傳感器原理
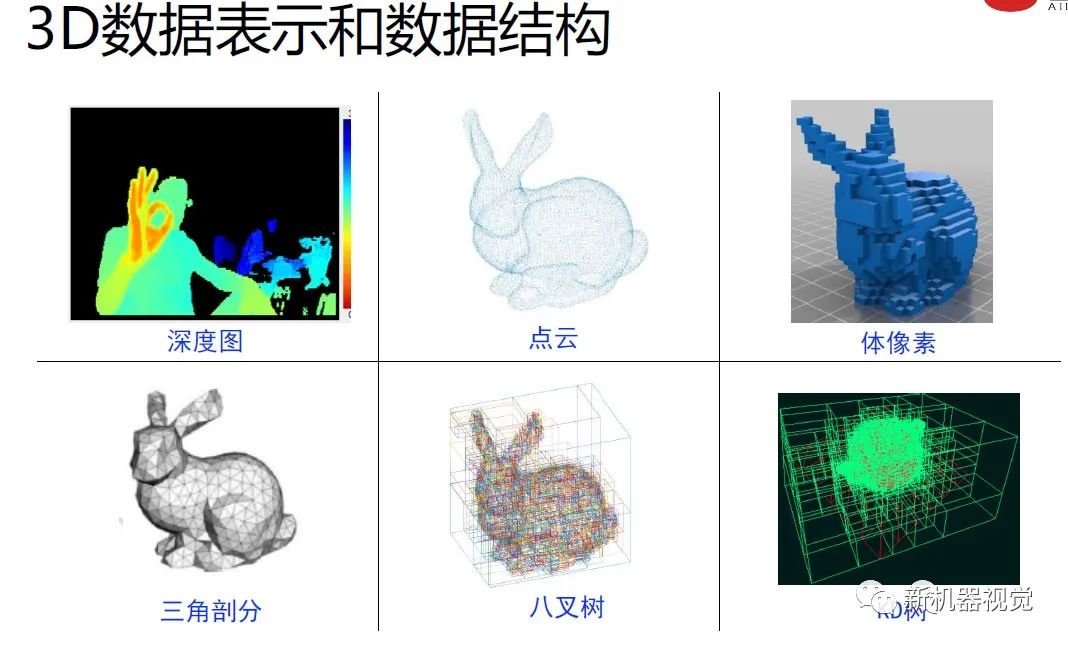
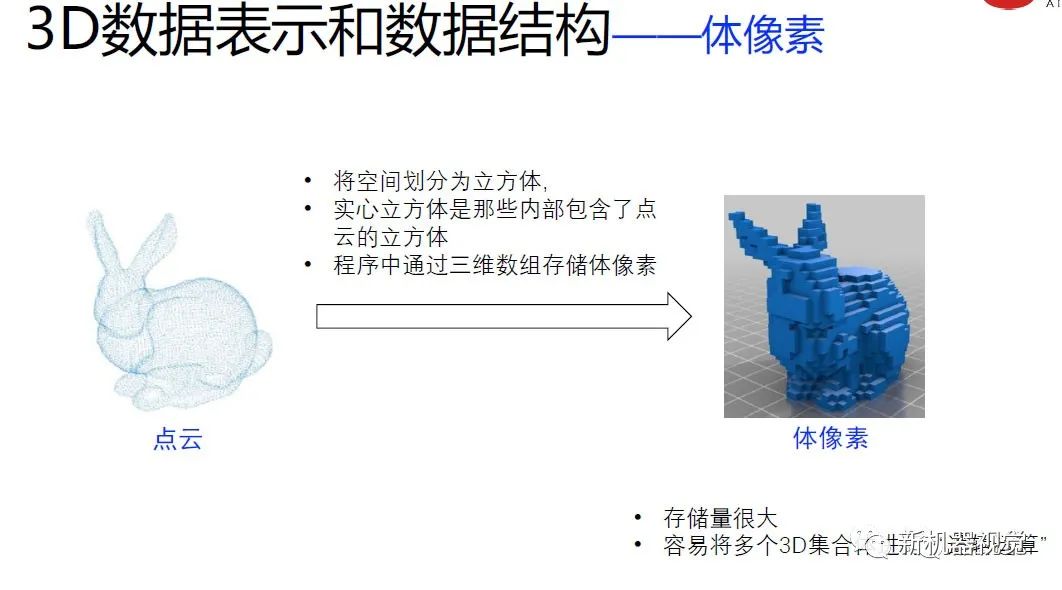
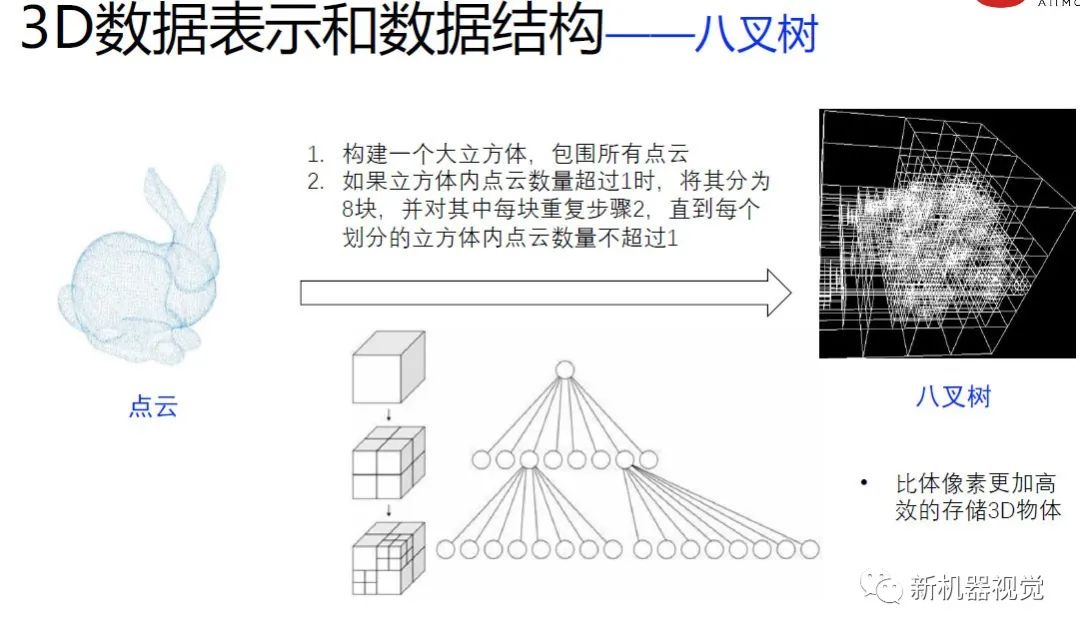
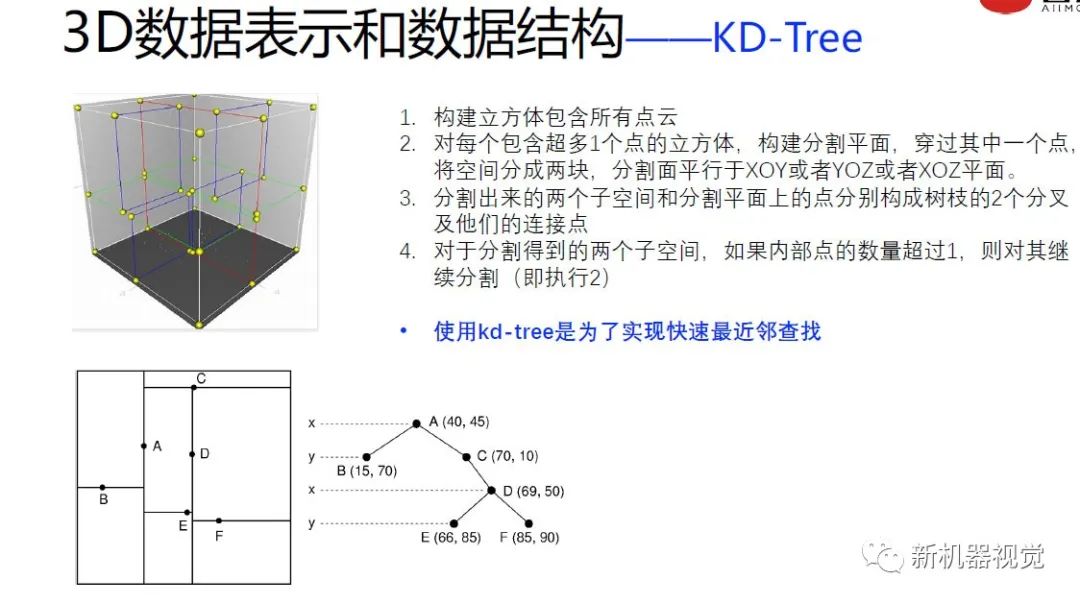
? 掌握深度圖、點(diǎn)云、體像素、kd樹(shù)、三角剖分等不同3D數(shù)據(jù)的表示方法和數(shù)據(jù)構(gòu)建算法
? 掌握3D數(shù)據(jù)處理算法,包括坐標(biāo)變換、濾波和過(guò)濾、檢索匹配
? 掌握常用的3D數(shù)據(jù)的參數(shù)計(jì)算和體征提取算法,包括平面、直線、曲線、曲面、立方體等3D物體尺寸和位姿參數(shù)估計(jì)
? 了解3D物體識(shí)別、場(chǎng)景分割算法,人體動(dòng)作識(shí)別算法,包括基于統(tǒng)計(jì)參數(shù)的識(shí)別算法和基于神經(jīng)網(wǎng)絡(luò)的分析算法。
來(lái)源:馬少爺
原文標(biāo)題:3D感知技術(shù)及實(shí)踐
文章出處:【微信公眾號(hào):新機(jī)器視覺(jué)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
責(zé)任編輯:haq
-
3D
+關(guān)注
關(guān)注
9文章
3016瀏覽量
115403 -
神經(jīng)網(wǎng)絡(luò)
+關(guān)注
關(guān)注
42文章
4839瀏覽量
108040 -
數(shù)據(jù)處理
+關(guān)注
關(guān)注
0文章
651瀏覽量
30050
原文標(biāo)題:3D感知技術(shù)及實(shí)踐
文章出處:【微信號(hào):vision263com,微信公眾號(hào):新機(jī)器視覺(jué)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
常見(jiàn)3D打印材料介紹及應(yīng)用場(chǎng)景分析

簡(jiǎn)單認(rèn)識(shí)3D SOI集成電路技術(shù)

從3D傳感器到立體相機(jī),解鎖工業(yè)應(yīng)用新可能

半導(dǎo)體“HBM和3D Stacked Memory”技術(shù)的詳解
立體視覺(jué)和激光雷達(dá)在3D智駕感知領(lǐng)域的差異分析

洛微科技攜4D FMCW激光雷達(dá)與3D感知方案閃耀光博會(huì),引領(lǐng)行業(yè)新趨勢(shì)

玩轉(zhuǎn) KiCad 3D模型的使用
季豐電子邀您相約2025國(guó)際3D視覺(jué)感知與應(yīng)用大會(huì)
iTOF技術(shù),多樣化的3D視覺(jué)應(yīng)用
普渡科技推出3D感知AI掃地機(jī)器人PUDU MT1 Max
基于NVIDIA AI的3D機(jī)器人感知與地圖構(gòu)建系統(tǒng)設(shè)計(jì)
深度感知的應(yīng)用和主要方法
3D閃存的制造工藝與挑戰(zhàn)



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論