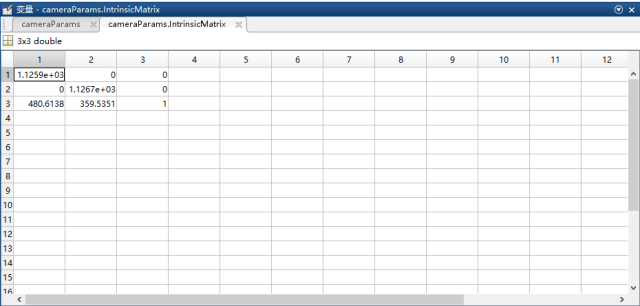
相機標定中所要確定的幾何模型參數分為內參和外參兩種類型。相機內參的作用是確定相機從三維空間到二維圖像的投影關系。相機外參的作用是確定相機坐標與世界坐標系之間相對位置關系。
2022-10-12 16:04:18 3607
3607 在FPGA設計中,復位電路是非常重要的一部分,它能夠確保系統從初始狀態開始啟動并保證正確運行。本文將分別介紹FPGA中三種常用復位電路:同步復位、異步復位和異步復位同步釋放,以及相應的Verilog代碼示例。
2023-05-14 14:44:493405 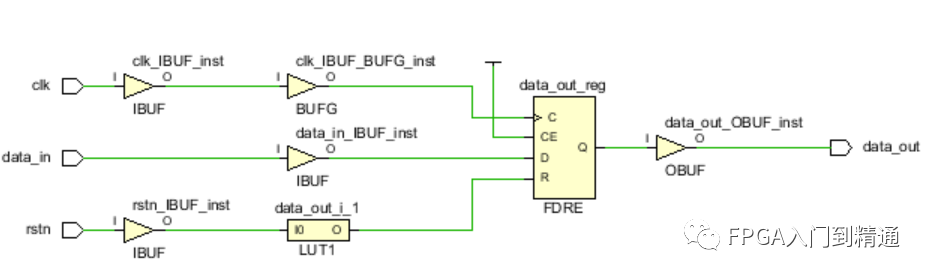
放大電路的內容終于搞完了,這是個很難啃的硬骨頭,需要反復的練習,仿真,歸納總結,才能理解的好。這里我把共射、共集、共基這三種最常用放大電路進行總結,友情提示,要收藏這篇文章,經常反復看,加深理解。
2023-09-04 09:17:3123764 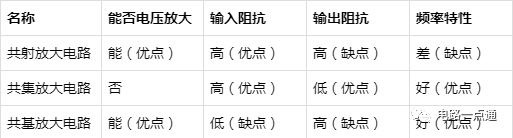
本文主要介紹如何通過正運動VPLC711視覺接口來實現相機標定和形狀匹配功能。
2024-06-26 15:11:101756 
本帖最后由 eehome 于 2013-1-5 09:47 編輯
三種常用的八位單片機性能比較
2012-08-16 19:08:14
三種常用的嵌入式操作系統——Palm OS、Windows CE、Linux;在此基礎上、分析、比較這三種嵌入式操作系統,給出它們之間的異同點及各自的適用范圍。1 嵌入式系統與嵌入式操作系統1.1
2021-12-22 07:36:58
三種常見的PCB錯誤是什么
2021-03-12 06:29:32
三種遠程測控終端(RTU)產品之間的比較
2021-05-28 06:27:08
常用的FBAR模型有哪三種?
2021-03-11 06:16:18
LoRa芯片應用:自組網透傳、LoRaNET和LoRaWAN三種協議
2021-03-17 08:02:34
FCC三種認證方式主要是針對不同類別產品。無線、射頻類產品必須申請FCC ID,電腦及電腦周邊產品需申請FCC DOC或ID,其它產品一般申請FCC VOC即可。三種認證方式中級別ID最高,需TCB
2015-10-22 14:11:47
HAL庫中UART的三種收發方式是什么?
2022-02-18 06:33:52
HFSS三種輻射邊界的區別與選擇技巧是什么?
2021-05-21 06:54:59
隨著視覺慣性傳感器在自動駕駛、機器人、AR/VR 等領域規模化落地,多相機+IMU 聯合標定需求呈爆發式增長,多相機+IMU 聯合標定領域尚屬空白。
感算商城聯合知名方案公司推出國內首臺量產級
2025-10-23 14:04:48
``【課程推薦】龍哥手把手教你學LabVIEW機器視覺設計教程請問哪位大神有Labview機器視覺相機標定的程序文件,麻煩分享一下?在下不甚感激!qq:599108466.``
2016-05-25 12:36:45
QSPI特點QSPI三種工作模式
2020-12-31 06:36:55
STM32三種啟動方式是什么
2021-12-15 07:16:54
STM32三種啟動模式對應的存儲介質是什么?
2022-01-27 07:00:03
STM32實現復位的三種常用方式問題:最近做項目碰到單片機程序運行過程中,需要根據外部輸入信號,對單片機進行復位的操作。解決:目前常用的復位方式有硬件復位和兩種軟件復位:1、硬件復位通過給NRST
2021-08-12 07:23:06
、示例驗證總結參考資料任務摘要請說明STM32的三種Boot模式的差異,并在之前第11-12周“C語言各種變量的存儲地址”作業代碼基礎上,研究至少兩種boot模式下,代碼下載(燒錄)運行后所在的地址位置,與理論對比驗證。一、認識boot1.三種BOOT模式介紹所謂啟動,一般來說就是指我
2021-12-10 07:46:37
最近在項目的時候需要判別STM32的復位類型,網上這部分資料也有許多大神進行總結。但是感覺不是特別深入,因此,小編參考參考了STM32的參考手冊進行詳細總結了一下。1、STM32的三種復位類型分別為
2021-08-02 06:32:00
相機標定不成功點擊下一步沒反應
2015-04-16 12:58:59
最近在做視覺,需要用labview做相機的標定,通過空間轉換確定空間位置。視覺助手的標定只能標定內參數,沒有辦法做內外參數的標定,哪位大神給指導指導如何做一個標準的標定程序。
2017-04-24 16:08:44
labview視覺九點標定程序分享下,感謝各位大佬
2021-01-25 18:08:29
while的三種使用形式是什么樣的?
2021-11-02 08:35:34
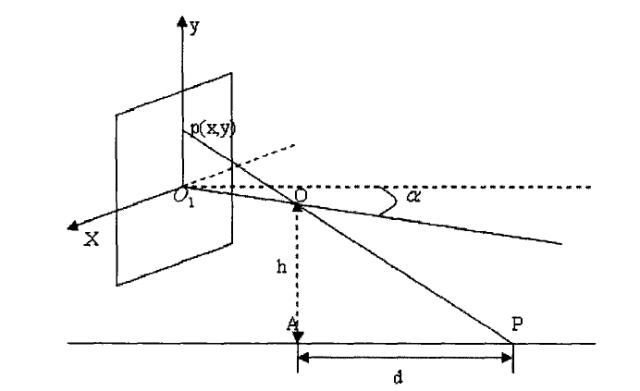
雙目視覺的原理:由于視差原理,左右兩個ccd的位置固定,若能測量空間中同一個點P在左右兩個ccd中圖像的位置,則根據三角原理,可以求得P點在空間中的坐標位置。可用于攝像頭實現空間點的距離測量。下圖
2021-09-27 16:52:18
一燈雙控的三種接線方法有哪些利弊
2021-03-11 07:10:04
一般伺服都有三種控制方式:速度控制方式,轉矩控制方式,位置控制方式。大多數人想知道的就是這三種控制方式具體根據什么來選擇的?
2021-01-29 07:28:36
伺服電機的三種控制方式
2021-01-21 06:45:01
單元換算到實際單位時的大小,然后根據像素坐標計算實際坐標,那么如果我用相似三角形的原理的話,是不是可以結合它來使用而不進行相機標定求各位迷惑的和搞清楚的人都說一下你們的見解!!謝謝!!
2016-05-20 15:49:27
從不同的側重點給出了幾種拓撲,將對其進行分析比較三種拓撲有其各自的有缺點,如何來選擇它們?
2021-04-07 06:05:16
一個合適的軟件架構不僅結構清晰,而且可以便于開發與維護。便于幫助開發者把握整個工程的框架三種常用的軟件架構:1.順序執行的前后臺系統2.時間片輪詢系統3.多任務操作系統順序執行的前后臺系統程序以變量
2022-01-07 08:29:54
單片機系統中最常用的三種通信協議是什么?
2022-02-17 06:03:46
處理計算帶來誤差,為了消除這些誤差,我們在進行3D視覺建模的過程中需要對我們使用的攝像機進行標定,獲取相機內外參數,然后再根據內外參數對計算進行糾正。攝像機采集到的圖像發生的畸變通常分為徑向畸變和切向
2018-09-28 10:32:24
小白求助,求相機標定示例
2021-11-22 07:43:41
藍牙無線組網的優點是什么?常見的三種無線接入方式是什么?藍牙無線組網原理與上網方案分享
2021-05-26 06:33:11
鋼板進入兩個相機的視野范圍后,可測出鋼板在相機視野中的長度L1、L2,再加上盲區的長度L0即為鋼板長度L,即:L= L0+ L1+L2。 結語 采用工業相機對幾何尺寸的測量,不僅僅限于以上三種,還可
2018-08-17 09:51:14
LABVIEW 小白 想做一個軸承故障檢測系統 需要選擇軸承內圈外圈滾子三種故障計算公式算出的結果 要用枚舉控件有人能給編一下嗎就類似于用枚舉控件選擇三種不同類型的數值 可用數值常量代替
2018-04-27 16:51:41
結構光 線結構光視覺系統有著結構簡單、使用靈活、受周圍光照環境影響小等一系列特點,在實際中得到廣泛的應用。在該技術的使用中,標定是避免不了的一個環節。線結構光的標定過程大概可以分為兩個部分
2020-08-25 11:05:19
在機器視覺中,怎么標定坐標原點啊,我用的圖像匹配可以標定一個坐標原點,但是在不同的圖像上會有偏移,怎么才能減小偏移呢。求大家指教一下
2013-01-18 15:53:54
本帖最后由 lilin0734 于 2017-11-15 20:09 編輯
機器視覺手眼標定
2017-11-06 10:45:41
第三種WiFi模塊是什么?有什么特點?
2021-05-14 06:49:07
嵌入式學習日記2018.11.62018.11.16理論學習階段計算機科學導論(原書第二版)第8章 算法學到的新知識1算法的三種結構:順序、判斷(選擇)和重復(循環)2常用的算法:求和、乘積、找最小
2021-11-08 07:12:04
編譯的三種類型是什么?ARM_Linux制作嵌入式遠程調試工具
2021-12-24 06:42:58
IR900NAT配置常用的三種情景
2024-07-26 07:02:10
請群主詳細解釋下這三種啟動方式,看了參考資料不是很明白其意!謝謝!
2019-07-17 04:35:12
有個項目要用視覺定位,視覺拍好產品之后,把產品的坐標發送到PLC,PLC再執行定位指令。現在查到的資料都沒有涉及這一塊,都是講相機標定,而不是手眼標定。哪位有這方面的資料,怎么用labview實現手眼標定?
2020-05-28 14:42:35
進程類型進程的三種狀態
2021-04-02 07:06:39
光學標定板應用領域宏誠光學玻璃系列標定板和陶瓷系列標定板是專為高校實驗、研究單位項目研發和機器視覺集成商產品標定等等客戶群體使用的常用標定工具,能夠方便獲得相機的標定數據。標定板作用:為校正鏡頭畸變
2022-09-20 08:14:32
本文提出一種基于圖像輪廓進行相機自標定并計算投影矩陣從而恢復物體三維模型的方法。首先使用鏡面反射從圖像中獲取物體的多角度成像并利用閾值和邊緣提取得到圖像的輪
2009-12-07 11:53:50 19
19 數碼相機充電器對電池的充電狀態判斷方式有哪三種?
1、0△V電壓判斷方式鎳氫電池剛好充滿達到最高電壓時,
2009-11-04 16:39:122864 三種不同的“防 Ping”技巧
淺析三種不同的“防 Ping”方法
眾所周知,Ping命令是一個非常有用的網絡命令,大家常用它
2010-04-14 13:53:001287 matrox mil開發資料:CALIBRATION相機標定模塊
2015-12-10 16:32:068 什么是攝相機標定?攝相機標定方法的分類?感興趣的小伙伴們可以瞧一瞧。
2016-09-22 12:04:450 三菱PLC(可編程邏輯控制器)編程實例項目例程——數控機床插補算法中最常用的三種算法源碼
2016-11-08 17:32:1244 攝像機標定是機器視覺和攝像測量領域相對基礎的工作,同時也是最復雜、困難的T作。攝像機標定的意義是得到立體空間中對象的幾何信息,其中所使用的圖像信息由雙目攝像機所得。定后的雙目攝像機得到的圖像目標信息
2017-11-06 14:41:0530 問題,、提出一種基于雙目視覺的投影儀標定算法,將投影儀視為逆向相機,利用一個輔助相機捕獲投影于不同位置標定平面,確立攝像機圖像與標定平面之間的對應關系,然后利用極線原理得到攝像機圖像與投影儀圖像之間的對應關
2017-11-06 15:30:2120 我們首先介紹下計算機視覺領域中常見的三個坐標系:圖像坐標系,相機坐標系,世界坐標系。以及他們之間的關系。然后介紹如何使用張正友相機標定法標定相機。攝像機標定(Camera calibration)簡單來說是從世界坐標系換到圖像坐標系的過程,也就是求最終的投影矩陣的過程。
2017-12-04 16:56:3519085 
針對張正友標定方法中相機內參數的求解可能陷入局部最優解的問題,考慮鏡頭的三階徑向畸變和二階離心畸變,提出一種基于改進遺傳算法的單目相機內參數優化標定方案。該方法可顯著提高相機標定中內參數的精度,并能避免陷入局部最優。最后,實驗驗證了所提方案的有效性和可行性。
2018-01-05 16:11:492 嵌入式linux中文站給大家介紹三種Linux中的常用多線程同步方式:互斥量,條件變量,信號量。
2019-05-02 14:49:003489 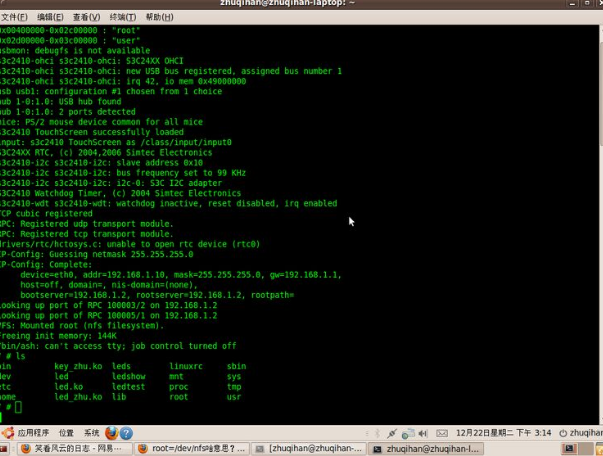
目前的深度相機根據其工作原理可以分為三種:TOF相機、雙相機立體視覺、結構光投射立體視覺。
2019-05-14 09:04:588825 相機標定可以說是計算機視覺/機器視覺的基礎,但是初學者不易上手,本文將給讀者整理一遍相機標定的邏輯,并在文末回答評論區提出的問題。分為以下內容:
2019-06-01 09:54:155154 
本文檔的主要內容詳細介紹的是機器視覺系統的三種應用案例詳細說明包括了:機器視覺在藥用玻璃瓶檢測中的應用,機器視覺在印刷包裝行業中的應用,機器視覺在智能交通領域中的應用
2019-09-04 16:39:5924 化工自動化中一般常用三種基本控制規律(或稱作用方式)比例作用(P),控制器輸出的變化與偏差的變化成比例。偏差越大,控制作用越強。在化工中可單獨使用,如液位控制等,用于不要求嚴格消除殘余偏差的場合。
2020-03-15 15:51:0011689 MEMS器件利用半導體加工技術來制造三維機械結構,三種最常用的MEMS制造技術包括體微加工(Bulk Micro Machining)、表面微加工(Surface Micro Machining)和LIGA。
2020-07-29 17:42:588760 在實際控制中,相機檢測到目標在圖像中的像素位置后,通過標定好的坐標轉換矩陣將相機的像素坐標變換到機械手的空間坐標系中,然后根據機械手坐標系計算出各個電機該如何運動,從而控制機械手到達指定位置。這個過程中涉及到了圖像標定,圖像處理,運動學正逆解,手眼標定等。
2020-08-28 11:42:4612627 
在圖像測量過程以及機器視覺應用中,為確定空間物體表面某點的三維幾何位置與其在圖像中對應點之間的相互關系,必須建立相機成像的幾何模型,這些幾何模型參數就是相機參數。
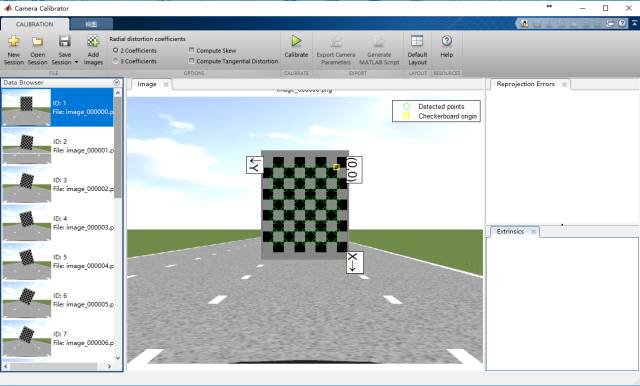
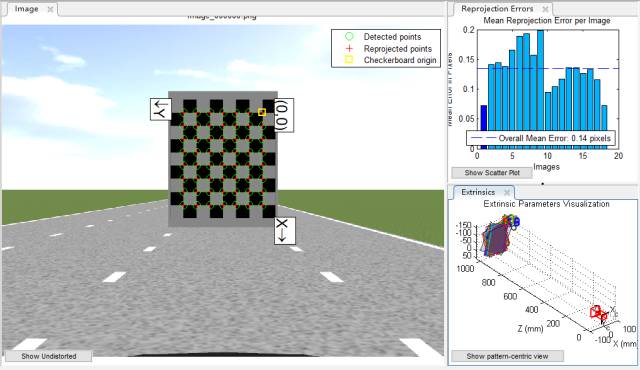
2020-08-28 15:18:0815425 采用張正友提出的基于2D平面棋盤格的攝像機標定方法,利用Matlab攝像頭標定工具完成相機參數的標定。
2020-08-31 10:04:125849 
應用必須嚴格按照施工規范進行,而且不同實際環境需考慮采用不同的總線拓撲結構,本文介紹三種常用的總線拓撲結構。
2020-09-10 15:02:3229624 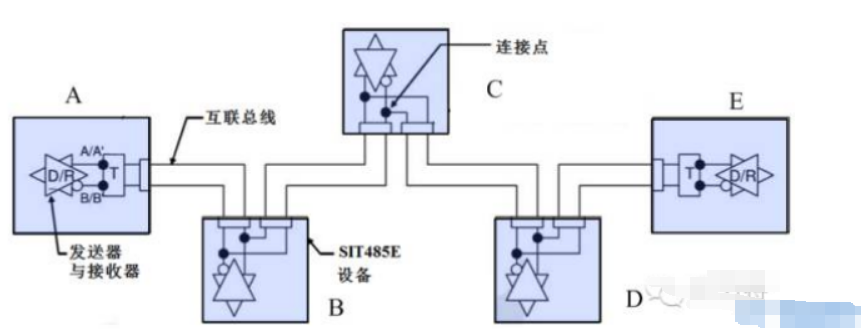
轉自:微信公眾號AI圖像 創建標定數據模型 你可以用算子create_calib_data創建一個標定數據模型,指定相機和標定物體的數量。當用一個相機的時候,你也用一個單獨的標定物體。 然后,你要做
2020-10-31 11:31:385419 
張正友相機標定法是張正友教授1998年提出的單平面棋盤格的相機標定方法。傳統標定法的標定板是需要三維的,需要非常精確,這很難制作,而張正友教授提出的方法介于傳統標定法和自標定法之間,但克服了傳統標定
2020-12-31 10:06:197405 
由于壓電陶瓷馬達具有體積小、大力矩等優勢,目前越來越多的用戶選擇壓電陶瓷馬達替代傳統的電機,使壓電陶瓷馬達的應用范圍越加廣泛。目前市面上常用的壓電馬達有三種:粘滑式壓電馬達、步進式壓電馬達、超聲波壓電馬達。
2021-03-23 10:00:279 相機標定在計算機視覺領域中有著至關重要的作用。絕大多數相杋標定方法假設相機為針孔模型,且需要良好聚焦的圖像來保證相機內外參估計的準確性。然而,這些條件會受到相機景深的影響。在薄透鏡相機模型假設下,提
2021-04-21 15:05:5716 相機固定不動, 上往下看引導機器人移動 機器人與視覺標定理論詳解 1.相機非線性校正使用標定板做非線性校正2.相機與機器人做9點標定可以使用機器人扎9個點,或者機器人抓住工件擺放9個位置,得到9個
2021-05-27 14:15:534610 
在大多數條件下,這些參數必須通過實驗與計算才能得到。無論是在圖像測量或者機器視覺應用中,相機參數的標定都是非常關鍵的環節,其標定結果的精度及算法的穩定性直接影響相機工作產生結果的準確性。
2022-06-21 11:12:349141 在實際控制中,相機檢測到目標在圖像中的像素位置后,通過標定好的坐標轉換矩陣將相機的像素坐標變換到機械手的空間坐標系中,然后根據機械手坐標系計算出各個電機該如何運動,從而控制機械手到達指定位置。這個過程中涉及到了圖像標定,圖像處理,運動學正逆解,手眼標定等。
2022-08-18 15:54:378620 張正友相機標定法是張正友教授1998年提出的單平面棋盤格的相機標定方法。傳統標定法的標定板是需要三維的,需要非常精確,這很難制作,而張正友教授提出的方法介于傳統標定法和自標定法之間,但克服了傳統標定
2022-11-14 10:14:405014 相機標定可以歸納為P?n?P(Perspective-n-Point)的問題,即已知三維物點坐標和對應的二維投影坐標,求解相機參數。由于鏡頭的畸變(徑向和切向)帶來非線性成像模型,一般求解方法分為兩步:
2022-12-21 09:52:302249 在圖像測量過程以及機器視覺應用中,為確定空間物體表面某點的三維幾何位置與其在圖像中對應點之間的相互關系,必須建立相機成像的幾何模型,這些幾何模型參數就是相機參數。在大多數條件下這些參數必須通過實驗與計算才能得到,這個求解參數的過程就稱之為相機標定(或攝像機標定)。
2023-01-10 10:59:042684 今天介紹的是vivado的三種常用IP核:時鐘倍頻(Clocking Wizard),實時仿真(ILA),ROM調用(Block Memory)。
2023-02-02 10:14:015002 此方法采用一塊大標定板來統一各個相機的坐標,每個大標定板中有若干小標定板,各個小標定板間的位置關系都是已知的,各個相機都能拍攝到一個小標定板。通過各個小標定板可以標定每個相機的內部參數和外部參數,每個相機的坐標都可以轉換到各個小標定板的坐標系上,從而統一各個相機的坐標。
2023-03-13 10:06:373157 該數據集包括了不同仿真環境下生成的合成數據,以及不同場景下由各類真實相機采集到的圖像和視頻序列。每一個數據樣本均提供了準確的標定結果、相機參數、或視覺線索。
2023-04-10 10:45:38663 相機標定是通過輸入帶有標定patter的標定板來獲得相機參數的一個過程。實際的光學成像是一套非常復雜的過程,從三維世界投影到相機中的二維圖像。相機標定就是用抽象的數學模型來表示這個復雜的成像過程。
2023-06-01 14:36:461342 
相機標定是計算機視覺最基礎也是至關重要的一個問題,標定的精度夠不夠決定了以后的校正、去畸變、配準、計算三維坐標、恢復三維模型能否進一步做下去。
2023-06-26 09:51:301030 首先,課程介紹了雙目相機標定的基礎知識。我了解到雙目相機是由兩個相機組成的系統,通過同時拍攝目標物體的兩個視角來獲取三維信息。
2023-07-03 14:25:064392 
本文對ToF、雙目視覺、結構光這三種技術展開分析,幫助你了解其各自的特點及應用
2023-07-10 16:04:161878 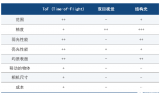
在大多數條件下,這些參數必須通過實驗與計算才能得到。無論是在圖像測量或者機器視覺應用中,相機參數的標定都是非常關鍵的環節,其標定結果的精度及算法的穩定性直接影響相機工作產生結果的準確性。
2023-08-03 09:38:043495 
張正友標定方法是一種經典的相機標定方法,目前是最受歡迎的方法之一。該方法通過一種機器學習的方法,利用大量匹配的數據點像素坐標、世界坐標,基于極大似然估計擬合得到一個最優解。
2023-08-03 10:59:121974 
對于攝像機標定問題已提出了很多方法,攝像機標定的理論問題已得到較好的解決,對攝像機標定的研究來說,當前的研究工作應該集中在如何針對具體的實際應用問題,采用特定的簡便、實用、快速、準確的標定方法。
2023-08-04 12:54:174108 
這個逼近的過程就是「相機標定」,我們用簡單的數學模型來表達復雜的成像過程,并且求出成像的反過程。標定之后的相機,可以進行三維場景的重建,即深度的感知,這是計算機視覺的一大分支。
2023-10-18 17:00:071636 
在電源領域,散熱至關重要,它可直接影響電源性能、可靠性和壽命。隨著電子元件的尺寸不斷縮小,功率越來越大,有效的冷卻方法對于防止過熱和確保最佳功能至關重要。在本文中,我們將深入獨具吸引力的電源冷卻領域,并探討三種常用方法的優缺點:對流冷卻、傳導冷卻和強制空氣冷卻。
2023-12-03 10:29:572115 無論是陸地測繪還是海洋測繪,測繪行業都是朝著航空方向發展。下面結合搜索到的論文和相關網頁,總結下無人機測深的方法,總共有三種:1)機載激光雷達;2)機載探地雷達(GPR);3)機載高精度測深儀。
2024-01-05 11:24:453490 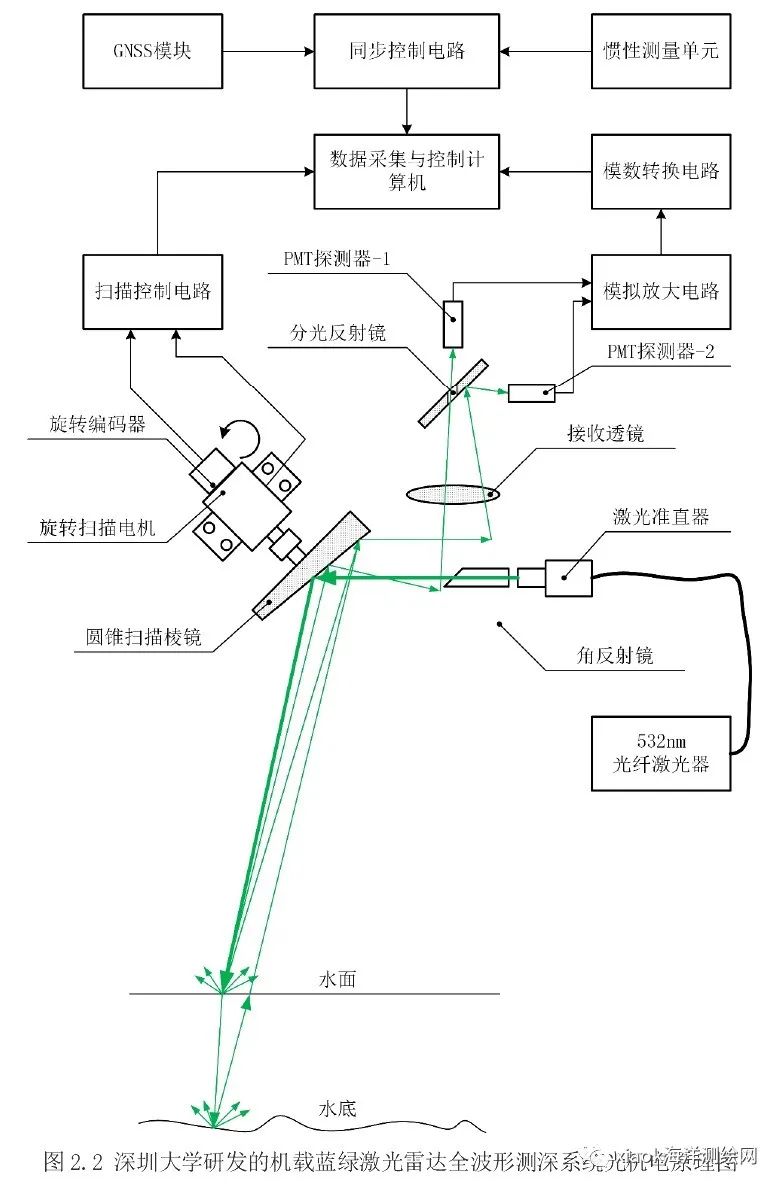
1.文件運行 導入工程 雙擊運行桌面GraniStudio.exe。 通過引導界面導入相機標定例程,點擊導入按鈕。 打開相機標定例程所在路徑,選中相機標定.gsp文件,點擊打開,完成導入。 2.功能
2025-08-22 17:38:25834 
 電子發燒友App
電子發燒友App








 工商網監
工商網監
評論