") 一文帶你了解這三種3D視覺技術(shù)
一文帶你了解這三種3D視覺技術(shù)

技術(shù)一覽
1. ToF (Time-of-Flight)
ToF是一種非常有效的技術(shù),可用于測(cè)量距離以獲得深度數(shù)據(jù)。集成在相機(jī)中的光源可發(fā)出光脈沖照射到物體上,物體將光脈沖反射回相機(jī)。根據(jù)光脈沖所需的時(shí)間,可以確定被測(cè)物每個(gè)點(diǎn)與相機(jī)的距離信息,從而得到深度值。因此,被檢測(cè)物體的3D值會(huì)以范圍圖或點(diǎn)云的形式輸出為一張空間圖像。除此之外,ToF還能為每個(gè)像素以灰度值的形式提供2D強(qiáng)度圖像,以及可表示單個(gè)值置信度的置信度圖。
使用ToF進(jìn)行3D采集時(shí),基本不受物體的強(qiáng)度和顏色的影響,也無(wú)需邊緣標(biāo)定、轉(zhuǎn)角等功能設(shè)置,因此可以輕松使用圖像處理技術(shù)將其與背景分開。該采集過(guò)程也適用于移動(dòng)的物體,每秒最多能執(zhí)行900萬(wàn)次距離測(cè)量,精度可達(dá)毫米級(jí)。與其他3D相機(jī)相比,ToF相機(jī)更為經(jīng)濟(jì)、精巧和簡(jiǎn)單,可實(shí)現(xiàn)輕松安裝和集成。
不過(guò),ToF相機(jī)僅在特定環(huán)境條件下和定義的測(cè)量范圍內(nèi),才能提供理想的采集結(jié)果。這是由于ToF相機(jī)采用底層的ToF測(cè)量方法,在測(cè)量物體的角落或凹形面時(shí),發(fā)射光會(huì)進(jìn)行多次反射,導(dǎo)致ToF方法的測(cè)量結(jié)果出現(xiàn)偏差。離相機(jī)太近的高反射表面會(huì)導(dǎo)致鏡頭中出現(xiàn)雜散光,從而產(chǎn)生偽影。而對(duì)于非常暗的表面,由于反射光太少,存在無(wú)法進(jìn)行可靠測(cè)量的風(fēng)險(xiǎn)。工作距離太小也會(huì)對(duì)ToF方法造成限制,所以它總體上適用于測(cè)量范圍廣、對(duì)精度要求適中的應(yīng)用場(chǎng)景。
在托盤中的包裝用偽色顯示的3D點(diǎn)云
2. 雙目視覺
雙目視覺的工作原理與人眼類似。其3D原理是使用兩臺(tái)2D相機(jī)從不同視角拍攝同步的圖像,從而獲得深度信息。為了計(jì)算3D數(shù)據(jù),必須知道兩臺(tái)相機(jī)之間的相對(duì)位置(外部參數(shù))。此外,還需要獲得有關(guān)每臺(tái)相機(jī)的內(nèi)部參數(shù)信息,例如鏡頭的光學(xué)中心和焦距等,這些信息共同決定了特定于相機(jī)的校準(zhǔn)值。為了計(jì)算深度信息,首先需要校正兩個(gè)2D相機(jī)拍攝的圖像,然后使用適配算法在左右圖像中搜索相應(yīng)的像素,最后借助校準(zhǔn)值,就可以將場(chǎng)景或物體的深度圖像生成為點(diǎn)云。此過(guò)程中的最佳工作距離具體取決于兩臺(tái)相機(jī)的距離和設(shè)置角度,因此會(huì)各不相同。
對(duì)于結(jié)構(gòu)簡(jiǎn)單的表面,由于雙目視覺方法在兩個(gè)圖像中拍攝到的相應(yīng)特征不足,因此無(wú)法從中計(jì)算出三維信息,用戶可以通過(guò)搭配結(jié)構(gòu)光克服這些限制。
3. 結(jié)構(gòu)光
與雙目視覺技術(shù)不同,結(jié)構(gòu)光技術(shù)需要將其中一臺(tái)相機(jī)替換為條紋光投影儀。它會(huì)投影具有正弦強(qiáng)度曲線的各種條紋狀圖案,從而在表面上創(chuàng)建系統(tǒng)已知的人造結(jié)構(gòu)。在表面上投影的條紋變形可用于計(jì)算3D信息,并獲得更準(zhǔn)確的測(cè)量結(jié)果。
具備結(jié)構(gòu)光功能的芯片在近距離內(nèi)可實(shí)現(xiàn)較高的精度。使用結(jié)構(gòu)光方法時(shí)會(huì)產(chǎn)生很高的計(jì)算負(fù)載,它需要逐張采集和分析多個(gè)圖像,不適用于移動(dòng)的物體。綜上,它僅適用于有限范圍內(nèi)的實(shí)時(shí)應(yīng)用,否則需要投入更高的成本。
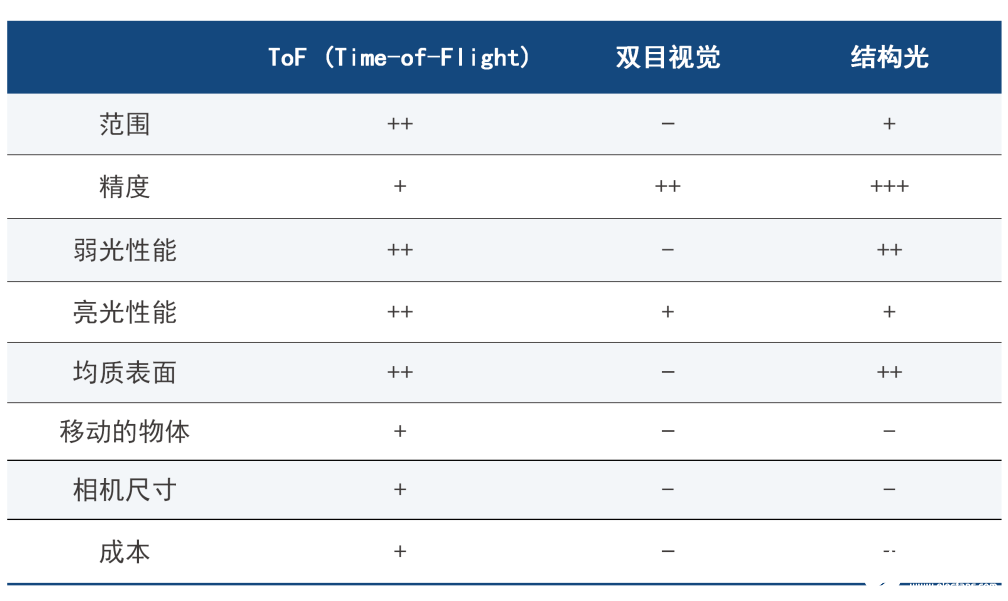
三者優(yōu)劣勢(shì)分析
典型應(yīng)用
1. 典型ToF應(yīng)用
在工作距離長(zhǎng)、測(cè)量范圍大、高速運(yùn)作以及系統(tǒng)復(fù)雜性低的應(yīng)用中,ToF技術(shù)尤其可以發(fā)揮所長(zhǎng),而極高的精度則不是重要的考慮因素。
● 測(cè)量物體(體積、形狀、位置、方向)
● 工廠自動(dòng)化:查找、拾取、組裝物體;檢測(cè)損壞的物體或堆垛錯(cuò)誤
● 機(jī)器人:確定機(jī)器人的拾取點(diǎn);傳送帶上的抓取任務(wù)、箱盒取物、拾取與放置
● 物流:包裝、堆垛、打(拆)托盤、打標(biāo)簽、自動(dòng)駕駛車輛(導(dǎo)航、安全警告)
● 醫(yī)學(xué):病人的定位和監(jiān)測(cè)
2. 雙目視覺和結(jié)構(gòu)光的典型應(yīng)用
雙目視覺技術(shù)可以提供較高測(cè)量精度,而具備結(jié)構(gòu)光功能的相機(jī)性能更勝一籌。這些類型的3D相機(jī)適用于檢測(cè)結(jié)構(gòu)較少的平扁表面,或需要實(shí)現(xiàn)較高測(cè)量精度的應(yīng)用。
● 確定位置和方向
● 對(duì)物體進(jìn)行高精度測(cè)量(體積、形狀、位置、方向)
● 機(jī)器人:箱盒取物、導(dǎo)航、防撞、裝貨和卸貨服務(wù)
● 物流:室內(nèi)車輛導(dǎo)航、機(jī)器的裝卸、打(拆)托盤
● 戶外:測(cè)量和檢測(cè)樹干
● 損壞檢測(cè)等組件檢測(cè)
目前,結(jié)合深度學(xué)習(xí)或人工智能的3D技術(shù)受到了越來(lái)越多應(yīng)用的青睞。這種技術(shù)交互使得物體識(shí)別以及精確確定物體在空間中的位置變得更輕松,所以機(jī)器人現(xiàn)在能夠抓取以前無(wú)法抓取的物體。而同步定位與地圖構(gòu)建(SLAM)系統(tǒng)使用視覺芯片來(lái)創(chuàng)建高分辨率的三維地圖,同樣適用于自動(dòng)駕駛汽車和增強(qiáng)現(xiàn)實(shí)應(yīng)用方面。
本文轉(zhuǎn)載自:Basler計(jì)算機(jī)視覺微信公眾號(hào)
審核編輯:湯梓紅
-
芯片
+關(guān)注
關(guān)注
463文章
54007瀏覽量
465952 -
TOF
+關(guān)注
關(guān)注
9文章
544瀏覽量
38470 -
3D視覺
+關(guān)注
關(guān)注
4文章
482瀏覽量
29215
發(fā)布評(píng)論請(qǐng)先 登錄
iTOF技術(shù),多樣化的3D視覺應(yīng)用
波形繪制——3D Graph
機(jī)器視覺3D成像技術(shù)大全!
一文帶你了解步進(jìn)電機(jī)的相關(guān)知識(shí)
最新裸眼3D技術(shù)揭秘


帶你了解3D微波技術(shù)及其應(yīng)用場(chǎng)景



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論