所謂多傳感器信息融合(Multi-sensor Information Fusion,MSIF),就是利用計算機技術將來自多傳感器或多源的信息和數(shù)據(jù),在一定的準則下加以自動分析和綜合,以完成所需
2016-01-13 11:26:09 4655
4655 ,而且也綜合處理了其它信息源的數(shù)據(jù)來提高整個傳感器系統(tǒng)的智能化。多傳感器融合 系統(tǒng)具有四個顯著的特點:
????1、信息的冗余性:對于環(huán)境的某個特征,可以通過多個傳感器(或者單個傳感器的多個不同時刻)得到
2018-11-07 10:53:06
對玻璃、鏡子等投射或者反射光信號的物體進行檢測,此外單線束的激光雷達也難以檢測出不同高度的障礙物信息。所以,多傳感器融合是大勢所趨。 目前較為常見的組合是采用激光雷達、深度相機外加超聲波等傳感器
2018-08-27 17:19:46
`這是創(chuàng)客集結號的作品四足機器人身體和四足都是通過3D打印技術打印出來的,通過自己安裝連接上超聲波傳感器,制作成功的四足機器人完全就很了。`
2018-09-29 09:55:09
四足機器人屬于復雜機電系統(tǒng),需要綜合生物、機械、電子、控制等學科內(nèi)容,具體涉及仿生機構設計、靈巧運動機構設計、高性能驅動器制造,行走穩(wěn)定性控制、強化學習等在內(nèi)的多個研究方向。其中,機構設計是保障四足
2021-09-15 06:54:01
本帖最后由 紅塵。破 于 2016-8-19 14:59 編輯
今天整理資料時發(fā)現(xiàn)了一年前做的四足仿生機器人,當時買了一個四足仿生機器人的骨架,畫了個板子,寫了個測試代碼,能完成簡單的行走,后面加了避障、顯示功能啥的,不過視頻資料沒了,只有簡單行走的視頻,優(yōu)酷鏈接在下面評論
2016-08-19 14:59:33
本帖最后由 eehome 于 2013-1-5 10:08 編輯
四足步行機器人的彎道行走
2012-08-12 09:53:57
多傳感器信息融合問題,我剛剛查了百度,但是說的全是理論。我想問的是:1、多傳感器信息融合使用的處理器是單片機還是電腦?2、單片機外接幾個傳感器然后顯示出來算是多傳感器信息融合技術么??3、他能帶給我們什么好處?
2020-08-26 08:07:50
多傳感器信息融合技術
2012-08-15 20:09:31
傳感器相互協(xié)同操作的優(yōu)勢,而且也綜合處理了其它信息源的數(shù)據(jù)來提高整個傳感器系統(tǒng)的智能化。多傳感器融合系統(tǒng)具有四個顯著的特點: 1、信息的冗余性:對于環(huán)境的某個特征,可以通過多個傳感器(或者單個傳感器
2018-11-07 11:06:00
多傳感器融合系統(tǒng)具有哪幾個特點?信息融合系統(tǒng)的體系結構主要有哪幾種?
2021-05-19 06:36:24
,就能依靠經(jīng)驗,學習到很多更好的作業(yè)方法,并且熟練掌握。 機器人傳感器可分為機器人內(nèi)部傳感器和機器人外部傳感器兩種。機器人內(nèi)部傳感器的功能是測量運動學和動力學參數(shù),其提供信息的目的是控制機器人按規(guī)定
2018-01-03 17:09:03
一般機器人系統(tǒng)由機械手、環(huán)境、任務和控制器四個互相作用的部分組成。我們稱一般安裝在機器人機械手上的傳感器為內(nèi)傳感器(Inner Sensons),而稱作為環(huán)境的一部分的傳感器為外傳感器
2021-09-16 08:45:39
隨著智能化的程度提高,機器人傳感器應用越來越多。智能機器人主要有交互機器人、傳感機器人和自主機器人3種。從擬人功能出發(fā),視覺、力覺、觸覺最為重要,早已進入實用階段,聽覺也有較大進展,其它還有嗅覺
2021-09-16 09:05:02
傳感產(chǎn)業(yè)也形成了生產(chǎn)和科研力量。 機器人的控制系統(tǒng)相當于人類大腦,執(zhí)行機構相當于人類四肢,傳感器相當于人類的五官。因此,要讓機器人像人一樣接收和處理外界信息,機器人傳感器技術是機器人智能化的重要體現(xiàn)
2018-11-08 15:55:32
難以對玻璃、鏡子等投射或者反射光信號的物體進行檢測,此外單線束的激光雷達也難以檢測出不同高度的障礙物信息。所以,多傳感器融合是大勢所趨。 幾種常見的傳感器 目前較為常見的組合是采用激光雷達、深度
2018-08-27 15:44:02
。
同時,磁傳感器還是多傳感器融合中的 “穩(wěn)定錨點”。在機器人運動系統(tǒng)的融合定位中,它常作為核心基準。以 “足球機器人” 項目為例,當視覺傳感器因強光出現(xiàn)噪點、超聲波傳感器受聲波反射干擾時,內(nèi)置
2025-08-26 10:02:02
去年 1 月份,瑞士公司 ANYbotics 放出來一款靈活的四足機器人——ANYmal,它可以對抗各種惡劣的現(xiàn)實環(huán)境,適用于在危險的工業(yè)場景中執(zhí)行任務。在最近的世界機器人大會上,ANYbotics
2021-12-31 06:28:53
傳感器技術是仿人機器人研究的關鍵技術之一。仿人機器人之所以能在已知或未知的環(huán)境中完成一定的作業(yè)功能,是因為它能夠通過傳感器感知外部環(huán)境信息和自身狀態(tài),獲得反饋信息,實現(xiàn)系統(tǒng)的閉環(huán)控制。目前在仿人機器人中
2019-09-18 06:17:46
描述“邁爾斯”開源四足蜘蛛機器人它使用 8 個 SG90 / MG90 伺服電機 作為腿部的執(zhí)行器,由一個定制的 PCB 組成,用于為伺服系統(tǒng)供電和控制,而 Arduino Nano.PCB 具有
2022-08-09 06:30:29
求大神指導怎么做多足機器人的行走的動畫演示!!!
2017-04-23 11:36:56
用labview如何編寫六足機器人三足步態(tài)的程序?主要的依據(jù)和原理是什么呢?求指教!
2016-08-04 19:21:05
傳感器。四足機器人重2.2kg,有8個自由度,四條腿上都搭配了足底傳感器。其他零件由3D打印和現(xiàn)成的零件構成,可以做出重量輕且低成本的機器人,這也使得其他研究團隊可以快速開發(fā)和復制此項目。本文系統(tǒng)地描述了
2021-09-13 06:33:53
申請理由:我正在做這樣一個機器人,遇到了很多問題,非常想學習一下這款板子!我相信利用它能幫我解決難題!項目描述:可利用四足機械結構仿生行進,也可利用車輪進行行進,集四足機器人越障能力強和輪式機器人行動迅速的特點于一身,具有良好的復雜環(huán)境地形適應性,可用于災區(qū)偵查、救援。
2015-06-25 19:38:19
精度有待提高,本項目是基于多傳感器的融合算法,通過采用MEMS運動傳感器,使用TI的C6000系列DSP實現(xiàn)對傳感器采集數(shù)據(jù)的融合,結合定位算法,實現(xiàn)對工業(yè)機器人的精確定位,提高工業(yè)機器人的重復定位精度和絕對定位精度。
2015-09-10 11:13:49
,各個傳感器模塊之間的聯(lián)系。項目描述:雙足行走機器人主要功能實現(xiàn)了機器人的行走,周圍環(huán)境溫度、濕度等數(shù)據(jù)的檢測和實時畫面的傳輸,機器人行走速度和關節(jié)角度實時數(shù)據(jù)的反饋。行走保證直線行走和倒退直線行走
2015-11-30 15:57:04
`(不太會用論壇的發(fā)帖來編輯,圖片的位置都在最后面,附件里有技術報告)一、項目設計背景及概述雙足步行機器人是機器人研究領域的熱點,它集機械、電子、計算機、仿生學、自動控制、多傳感器及人工智能等多門
2014-01-02 14:31:52
龍人四足機器人是一種仿生機器人,由Openduino控制板控制,有四條腿,每條腿兩個自由度,由兩個舵機驅動,能實現(xiàn)兩種步態(tài)行走。配有三個超聲波,實現(xiàn)大角度智能避障。標準演示程序有5個可愛的表演動作。重要技術點: 四足機器人的行走步態(tài)設計、舵機的梯形速度控制、多路舵機的協(xié)調控制
2016-03-24 16:17:53
多傳感器信息融合技術綜合了概率統(tǒng)計、信號處理、人工智能、控制理論等多個學科的最新科研成果,為機器人精確、全面、實時地感知各種復雜的、動態(tài)的、不確定的未知環(huán)境提供了一種先進的技術手段。在研究基于多
2020-08-18 07:43:38
集成高精密減速器、高性能電機、絲桿機構、傳感器以及伺服控制系統(tǒng),伺服電動缸在保證更小體積的基礎上實現(xiàn)了驅控一體化,從而滿足了人形機器人復雜場景的應用需求。四、提升性能與可靠性德邁傳動伺服電動缸的應用還
2025-02-06 09:04:39
第三章、雙足機器人的硬件結構與框圖一、雙足機器人的硬件框圖圖1. 雙足機器人結構框圖
2013-11-25 11:30:18
本系統(tǒng)所設計的機器人的主要任務是在未知環(huán)境下依靠多傳感器信息,運用D-S數(shù)據(jù)融合算法,提供與環(huán)境有關的關于系統(tǒng)狀態(tài)的足夠的與可靠的信息,使機器人能夠自主規(guī)劃路徑、躲避障礙物,最終向目標靠近
2018-11-01 15:08:27
感知外部環(huán)境信息和自身狀態(tài),獲得反饋信息,實現(xiàn)系統(tǒng)的閉環(huán)控制。目前在仿人機器人中應用的傳感器種類繁多,例如視覺傳感器、電子羅盤、加速度計和超聲波傳感器等都是仿人機器人中常用的傳感器。DF-1機器人
2019-06-21 07:04:37
0 引言 現(xiàn)代工業(yè)生產(chǎn)以綜合、復雜、大型、連續(xù)為特點,采用大量傳感器來監(jiān)測和控制生產(chǎn)過程。多傳感器系統(tǒng)的出現(xiàn)導致信息量劇增,采用信息融合技術可更有效地利用信息資源。在復雜的工業(yè)控制系統(tǒng)中,控制
2018-11-12 10:49:55
本文介紹基于Android的多傳感器信息融合技術在氣溶膠自動化檢測中的應用。
2021-05-11 06:22:08
手術機器人系統(tǒng)的工作原理是什么?如何去實現(xiàn)一種基于傳感器的機器人手術系統(tǒng)設計?
2021-09-28 08:46:20
如何完整的組裝四足機器人?
2021-09-24 07:00:54
工業(yè)機器人中的伺服驅動的目的是什么?工業(yè)機器人中的關節(jié)內(nèi)部驅動結構是怎樣構成的?
2021-10-11 08:37:43
臉、人體識別與跟蹤能力。融合觸摸傳感器、語音AI模塊,APP等可以實現(xiàn)多模態(tài)的人機交互,使CyberDog 成為用戶的陪玩伙伴。在開放更多功能操作與代碼后,CyberDog也可以滿足機器人表演、娛樂
2021-09-14 14:05:56
怎么實現(xiàn)六足機器人的設計?
2021-11-22 08:02:22
基于STC15/LPC845的四足機器人是由哪些部分組成的?怎樣去制作一款基于STC15/LPC845的四足機器人?
2021-09-26 08:46:16
Ⅳ. 問題討論1) 設計選擇:設計一個低重量的四足機器人,同時保持有效的阻抗和力控制能力需要我們將這些功能相互協(xié)調地設計。我們設計一個新型足式機器人,使用無刷直流電機進行驅動,因為它們是一種高性能
2021-09-15 06:04:41
據(jù)麥姆斯咨詢介紹,控制和通信IC的發(fā)展在實現(xiàn)下一代的機器人中起到重要作用。然而,這些復雜的現(xiàn)代機器人的核心是許多新的、小型化和低成本的傳感技術的出現(xiàn)與融合。對實現(xiàn)下一代機器人至關重要的幾項關鍵傳感器技術包括磁性位置傳感器、存在傳感器、手勢傳感器、力矩傳感器、環(huán)境傳感器和電源管理傳感器。
2020-08-18 06:41:14
` 智能機器人的外部傳感器大致可分為力學傳感器,觸覺傳感器,接近傳感器,視覺傳感器,滑覺傳感器和熱覺傳感器等,對于智能機器人來說傳感器是必不可少的一部分,對于每一個環(huán)節(jié)傳感器都是很重要的,如此看
2015-01-20 14:56:46
的高度計,能夠實現(xiàn)的沖擊檢測,這是傳感器融合的另一個功能。在倉庫地面或醫(yī)院大廳四處移動的自主機器人的設計應避免撞到人或物體,但如果發(fā)生碰撞,機器人必須能夠檢測到碰撞。這時候,可以采取對加速度傳感器進行編程
2015-02-04 16:35:49
求契貝謝夫四足機器人的各部件尺寸
2013-11-27 15:42:51
控制和通信 IC 的發(fā)展在實現(xiàn)下一代的機器人中起到重要作用。然而,這些復雜的現(xiàn)代機器人的核心是許多新的、小型化和低成本的傳感技術的出現(xiàn)與融合。對實現(xiàn)下一代機器人至關重要的幾項關鍵傳感器技術包括磁性位置傳感器、存在傳感器、手勢傳感器、力矩傳感器、環(huán)境傳感器和電源管理傳感器。
2019-07-31 07:46:31
獲得自主行為,其最重要的任務之一是獲取關于環(huán)境的知識。這是用不同的傳感器測量并從那些測量中提取有意義的信息而實現(xiàn)的。視覺、紅外、激光、超聲波等傳感器都在移動機器人中得到實際應用。超聲波傳感器以其性價比
2019-02-27 23:29:58
`隨著傳感器技術的推廣應用,機器人的發(fā)展也備受關注,同時也因為傳感器技術的進步,使得工業(yè)機器人的發(fā)展有了支持。在機器人中使用的超聲波傳感器是一個電子模塊,測量距離在3cm到400cm之間。它可
2018-08-09 15:19:59
0引言傳感器技術是仿人機器人研究的關鍵技術之一。仿人機器人之所以能在已知或未知的環(huán)境中完成一定的作業(yè)功能,是因為它能夠通過傳感器感知外部環(huán)境信息和自身狀態(tài),獲得反饋信息,實現(xiàn)系統(tǒng)的閉環(huán)控制。目前在仿
2019-07-29 06:09:58
磁條時,霍爾感應到磁場,發(fā)出信號給MCU,控制方向,另在掃地機器人采用電池工作,所以在功耗要求上比較嚴格,采用全極低功耗且超高靈敏度型號ES248TGV。另外開關型霍爾傳感器還廣泛應用于測轉數(shù)、轉速、風速、流速、接近開關、警報器、自動控制電路等,布斯拓電子,專業(yè)霍爾供應商。`
2020-07-01 07:56:50
一起生活的陪伴機器人等各種各樣的服務機器人已經(jīng)出現(xiàn)了。 機器人所需的傳感器的作用是什么 在服務機器人中,在家庭中扮演寵物或家人角色的“陪伴機器人*1”通過基于AI的聊天功能和流暢的動作,甚至讓人們
2022-03-04 14:41:19
多傳感器信息集成與融合在處理信息中呈現(xiàn)出較好的實用性和優(yōu)越性。介紹了有關多傳感器信息集成與融合方面的基本知識,分析了傳統(tǒng)的信息融合與運用神經(jīng)網(wǎng)絡實現(xiàn)多傳感器信
2009-06-30 16:59:27 21
21 多傳感信息融合對于蟑螂的運動靈活性具有重要作用,為了模擬蟑螂腿毛的功能,提出采用多傳感器信息融合技術開發(fā)了一種信息實時采集系統(tǒng);該系統(tǒng)利用廉價鼠標作為傳感器,
2009-07-16 10:58:0523 機器人手爪上裝有多種傳感器,為了保證手爪能安全、可靠地抓取工件,必須對這些傳感器的數(shù)據(jù)進行融合。本文介紹手爪是哪個傳感器的配置情況。
2009-07-17 10:58:1320 本文介紹了利用多傳感器信息融合技術進行防盜報警的監(jiān)測系統(tǒng)。文中給出了傳感器的選擇原則和系統(tǒng)的硬件結構,并討論了多傳感器信息數(shù)據(jù)融合的幾種模型結構。關鍵詞:多
2009-08-07 09:41:2547 研究了基于神經(jīng)網(wǎng)絡的多傳感器融合技術,并將其應用于自主吸塵機器人中。給出了神經(jīng)網(wǎng)絡傳感器融合技術的基本原理,探索了改進的BP 信息融合算法,使得改進后的算法在收斂
2009-12-31 12:00:1411 根據(jù)多級傳感器信息融合的思想,本文構造了基于神經(jīng)網(wǎng)絡的特征級一決策級兩級信息融合模型,并使其在機器人避障控制中得以實現(xiàn)。兩級信息融合的使用,提高了各種傳感器
2010-01-20 13:53:4314 傳感器信息融合又稱數(shù)據(jù)融合,是對多種信息的獲取、表示及其內(nèi)在聯(lián)系進行綜合處理和優(yōu)化的技術。傳感器信息融合技術從多信息的視角進行處理及
2010-01-26 18:08:390 多被動傳感器系統(tǒng)航跡融合原理開發(fā)
多被動傳感器系統(tǒng)以其隱蔽特性得到重視,然而缺乏針對其獨有,特性的航跡融合法。本文分析了其信息接收特性和信息分
2010-02-26 16:43:1825 多傳感器信息融合是對多種信息的獲取、表示及其內(nèi)在聯(lián)系進行綜合處理和優(yōu)化的技術。單一傳感器只能獲得環(huán)境或被測對象的部分信息段,多傳感器信息融合后可以完善地、準確地反
2013-07-24 16:49:3240 機器人感覺與多信息融合!資料來源網(wǎng)絡,如有侵權,敬請見諒
2015-11-20 15:33:100 機器人多傳感器信息融合測距系統(tǒng)設計....
2015-12-23 15:00:2416 多傳感器信息融合技術概述一般意義上的信息融合(也稱為數(shù)據(jù)融合)是一種對信息多層次、多方面的處理過程,這個過程是對多源數(shù)據(jù)進行融合以獲得精確、完整、及時的目標屬性及狀態(tài)。單個傳感器提供的信息量較少
2017-01-16 11:50:586993 執(zhí)行器傳感器和環(huán)境傳感器。 末端執(zhí)行器傳感器:主要裝在作為末端執(zhí)行器的手上,檢測處理精巧作業(yè)的感覺信息。相當于觸覺。 環(huán)境傳感器:用于識別物體和檢測物體與機器人的距離。相當于視覺。
2017-10-16 15:21:068 機器人傳感器在機器人的控制中起了非常重要的作用,正因為有了傳感器,機器人才具備了類似人類的知覺功能和反應能力。
2018-07-06 15:11:0015201 介紹基于Android的多傳感器信息融合技術在氣溶膠自動化檢測中的應用。多個傳感器采用統(tǒng)一接口方式組網(wǎng),每一個獨立傳感器采集的數(shù)據(jù)通過藍牙傳輸?shù)骄W(wǎng)內(nèi)的Android處理終端進行融合和分析。通過對5種
2018-01-18 09:22:062669 
基于足綁式INS的單兵導航系統(tǒng),通過將慣性導航系統(tǒng)、人體運動學約束、磁強計等多傳感器信息進行融合得到準確的單兵導航信息。對于勻速步行時的單兵導航,可采用普通Kalman濾波算法進行多傳感器信息融合
2018-02-09 14:50:181 在工業(yè)自動化領域,機器需要傳感器提供必要的信息,以正確執(zhí)行相關的操作。機器人已經(jīng)開始應用大量的傳感器以提高適應能力。
2018-08-28 10:34:577675 早在20世紀的時候,多傳感器信息融合技術就已經(jīng)發(fā)展起來,它是利用計算機技術把多傳感器或者多源的信息和數(shù)據(jù),在一定的準則下加以自動分析和綜合,以完成所需要的決策和估計而進行的信息處理過程。多傳感器信息融合技術的使用,給人們的工作和生活帶來了很大的便利,促進了我國現(xiàn)代化社會的發(fā)展。
2018-10-28 10:16:2717997 控制和通信IC的發(fā)展在實現(xiàn)下一代的機器人中起到重要作用。然而,這些復雜的現(xiàn)代機器人的核心是許多新的、小型化和低成本的傳感技術的出現(xiàn)與融合。對實現(xiàn)下一代機器人至關重要的幾項關鍵傳感器技術包括磁性位置傳感器、存在傳感器、手勢傳感器、力矩傳感器、環(huán)境傳感器和電源管理傳感器。
2018-12-05 14:39:465229 控制和通信IC的發(fā)展在實現(xiàn)下一代的機器人中起到重要作用。然而,這些復雜的現(xiàn)代機器人的核心是許多新的、小型化和低成本的傳感技術的出現(xiàn)與融合。
2018-12-11 16:15:204357 據(jù)麥姆斯咨詢介紹,控制和通信IC的發(fā)展在實現(xiàn)下一代的機器人中起到重要作用。然而,這些復雜的現(xiàn)代機器人的核心是許多新的、小型化和低成本的傳感技術的出現(xiàn)與融合。
2018-12-21 13:41:004606 雙眼,幫助其觀察周遭環(huán)境。但僅有雙眼想實現(xiàn)智能行走還是不夠的,必須融合激光雷達、深度攝像頭、超聲波、防跌落等多種傳感器數(shù)據(jù),配合導航算法,才能實現(xiàn)智能行走。當機器人在復雜多變,環(huán)境不受控制的應用場
2019-02-28 09:10:11896 
最近四足機器人開始頻繁的進入大眾視野,相比傳統(tǒng)的輪式、履帶式以及雙足機器人,四足機器人在面對復雜地形時,擁有更高的機動性、更強的穩(wěn)定性,在軍事任務、搶險救災、地形勘探等多領域,展示出更加強大的能力。
2019-06-07 11:32:004736 整個分布式多傳感器信息融合系統(tǒng)由若干個不規(guī)則分布的多傳感器探測節(jié)點、 INTERNET 網(wǎng)絡、監(jiān)控中心服務器、交換機、數(shù)據(jù)庫服務器、應用服務器、多傳感器信息 融合終端和探測節(jié)點控制終端等組成
2019-08-26 14:01:363916 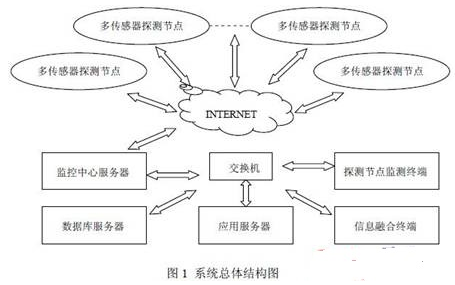
據(jù)麥姆斯咨詢介紹,控制和通信IC的發(fā)展在實現(xiàn)下一代的機器人中起到重要作用。然而,這些復雜的現(xiàn)代機器人的核心是許多新的、小型化和低成本的傳感技術的出現(xiàn)與融合。
2020-01-01 09:54:001515 機器人底盤的技術壁壘在于,不同場景下的多傳感器的融合具有一定的技術門檻。從物理層面上來看,機器人底盤則主要是眾多傳感器的集成,激光雷達、雙目視覺、超聲、紅外、以及輪轂電機、輪子等必要的懸掛。
2019-12-25 15:21:35928 本文介紹了利用多傳感器信息融合技術進行防盜報警的監(jiān)測系統(tǒng)。文中給出了傳感器的選擇原則和系統(tǒng)的硬件結構,并討論了多傳感器信息數(shù)據(jù)融合的幾種模型結構。
2020-01-09 16:26:5223 多傳感器數(shù)據(jù)融合技術結合了控制理論、信號處理、人工智能、概率和統(tǒng)計的發(fā)展,協(xié)同運用多傳感器的傳感數(shù)據(jù),提取所探測環(huán)境的近可能多的有用信息,消除信息的不確定性,提高傳感器的可靠性。
2020-03-11 15:16:352953 
與單傳感器相比,多傳感器信息融合的優(yōu)勢在于,能夠綜合利用多種信息源的不同特點,多方位地獲得相關事物的信息,增強數(shù)據(jù)的可信度,提高整個系統(tǒng)的可靠性和精度。
2020-04-01 16:51:123952 AHRS姿態(tài)系統(tǒng)在四足機器人中的應用 微型航姿參考系統(tǒng)(AHRS)AVS900系列產(chǎn)品是一款微型的全姿態(tài)測量傳感裝置,它由三軸MEMS陀螺、三軸MEMS加速度計、三軸磁阻型磁強計等傳感器以及高性能
2020-06-08 11:50:511341 在工業(yè)自動化領域,機器人需要傳感器提供必要的信息,以正確執(zhí)行相關的操作。
2020-07-17 17:52:472496 傳感器技術的應用逐漸廣泛,對于傳感器技術,電子專業(yè)的朋友都有多了解。為增進大家對傳感器技術的認識,本文將基于兩方面介紹傳感器技術:1. 光電傳感器技術,2. 多傳感器信息融合技術。如果你對傳感器技術具有興趣,不妨繼續(xù)往下閱讀哦。
2020-09-06 12:42:245519 “INDEMIND:隨著機器人的應用領域不斷拓展,對機器人的環(huán)境感知能力的要求也在不斷提升,而要解決環(huán)境感知問題,傳感器技術則是最重要的應用支撐技術之一,它對于機器人的意義亦如人眼對于人,但與人眼不同的是,它的構成主要由傳感器和算法組成,并伴隨著機器人發(fā)展,已從單傳感器向多傳感器融合迭代。”
2022-03-25 15:40:335304 幽靈公主的坐騎在現(xiàn)實中被造出來了? 日本川崎重工3月9日首次公開了旗下開發(fā)的全新四足機器人,外形類似宮崎駿《幽靈公主》中主角的坐騎——酷似山羊的雅酷兒。這款四足機器人采用步行模式與車輪移動2種行走
2022-04-06 15:51:472585 目前機器人被廣泛地應用到各個行業(yè)中,機器人能夠生產(chǎn),傳感器可是發(fā)揮了很大的作用,常用的幾種機器人傳感器大家知道嗎?在工業(yè)自動化領域,機器需要傳感器提供必要的信息,以正確執(zhí)行相關的操作。
2023-04-19 15:20:191148 人形機器人中常用的傳感器種類和用量,包括視覺類傳感器、麥克風陣列、觸覺類傳感器、溫度傳感器等。同時還討論了不同傳感器的作用和組合方式,以及在機器人內(nèi)部的布置和測試。根據(jù)對話片段,人形機器人的成本主要由傳感器、力控和關節(jié)等部分構成。
2023-10-17 11:11:581489 電子發(fā)燒友網(wǎng)站提供《掃地機器人中的霍爾效應傳感器應用說明.pdf》資料免費下載
2024-09-11 14:19:571
 電子發(fā)燒友App
電子發(fā)燒友App
















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論