傳感器相互協(xié)同操作的優(yōu)勢,而且也綜合處理了其它信息源的數(shù)據(jù)來提高整個傳感器系統(tǒng)的智能化。多傳感器融合系統(tǒng)具有四個顯著的特點: 1、信息的冗余性:對于環(huán)境的某個特征,可以通過多個傳感器(或者單個傳感器
2018-11-07 11:06:00
智能搬運機器人能實現(xiàn)小型柱狀物料顏色識別及搬運,能夠輕松完成中國教育機器人大賽的智能搬運競賽任務。機器人的移動由兩輪伺服電機驅(qū)動,萬向輪協(xié)助轉(zhuǎn)向,并用多個循線傳感器輔助完成復雜路線導航,前置超聲波
2016-03-24 10:32:24
與人工
智能系統(tǒng)
算法設計;與國內(nèi)外同類研究的比較:1.該
機器人能與人進行簡單的語言交流,能夠識別部分方言;2.能夠多平臺控制:語音控制,手機控制,電腦控制; 3.搭載多種
傳感器,隨時知道當?shù)販囟取穸?/div>
2015-12-02 19:08:42
;④ 傳感器對敏感材料的柔性和功能有特定要求。由此可見,感覺傳感器不僅包括傳感裝置本身,而且必須包括傳感器的信號處理。目前,對機器人傳感器的研究已經(jīng)成為智能機器人的重要課題。版權聲明:本資料屬于購線網(wǎng)gooxian.com所有,如需轉(zhuǎn)載,請注明出處,更多資料查看,請前往購線網(wǎng)!
2018-01-03 17:09:03
隨著智能化的程度提高,機器人傳感器應用越來越多。智能機器人主要有交互機器人、傳感機器人和自主機器人3種。從擬人功能出發(fā),視覺、力覺、觸覺最為重要,早已進入實用階段,聽覺也有較大進展,其它還有嗅覺
2021-09-16 09:05:02
機器人和移動機器人兩類;或分為一般機器人和擬人機器人兩類等。目前工業(yè)機器人多用于搬運、分揀、上下料、包裝、碼垛、焊接、噴涂、打磨、拋光、切割、擺放、裝配等方面。 隨著智能化的程度提高,機器人傳感器
2018-11-08 15:55:32
。
同時,磁傳感器還是多傳感器融合中的 “穩(wěn)定錨點”。在機器人運動系統(tǒng)的融合定位中,它常作為核心基準。以 “足球機器人” 項目為例,當視覺傳感器因強光出現(xiàn)噪點、超聲波傳感器受聲波反射干擾時,內(nèi)置
2025-08-26 10:02:02
可以探索對于高效傳感器融合設計至關重要的特定MCU功能。 我們的示例設計的簡化框圖如圖所示。圖1.關鍵設計目標是找到用于每個傳感器的最佳MCU接口,這種連接可以傳感器融合算法所需的速率提供傳感器數(shù)據(jù)
2019-05-23 08:00:00
`1、 教學領域:1) 計算機:可用NAO機器人驗證代碼,編寫相關程序,以及3D仿真與實體之間的邏輯關系;2) 自動化:研究個體和多機器人控制,以及多種傳感器信息融合;3) 機械:機械結(jié)構(gòu)設計
2015-02-12 15:17:18
用postman拉取融合結(jié)果如下:
改進前的融合結(jié)果 23.13,改進后的融合結(jié)果23.18,高精度傳感器測量值23.25。
四、參考文獻[1]宋坤,李雨婷,張鈺穎等.基于改進多傳感器數(shù)據(jù)融合算法
2024-01-06 12:18:08
本帖最后由 srxh 于 2015-12-7 23:19 編輯
講多傳感器數(shù)據(jù)融合技術,可參考下,拓展我們的系統(tǒng)構(gòu)架、優(yōu)化系統(tǒng)算法主要內(nèi)容:數(shù)據(jù)融合算法、融合結(jié)構(gòu),貝葉斯推理、Dempster_Shasher算法、人工神經(jīng)網(wǎng)絡、模糊邏輯和模糊神經(jīng)網(wǎng)絡。老外的書,比較經(jīng)典!
2015-12-07 22:52:50
無論是傳統(tǒng)的工業(yè)機器人系統(tǒng),還是當今最先進的協(xié)作機器人(Cobot),它們都要依靠可生成大量高度可變數(shù)據(jù)的傳感器。這些數(shù)據(jù)有助于構(gòu)建更佳的機器學習(ML)和人工智能(AI)模型。而機器人依靠這些模型變得“自主”,可在動態(tài)的現(xiàn)實環(huán)境中做出實時決策和導航。
2020-08-05 07:08:21
基礎、機器人本體、電子控制設備、傳感器與導航和機器人電源系統(tǒng)等。《機器人設計與實現(xiàn)》是按照搭積木的方法指導機器人愛好者如何設計、制作機器人平臺,如何賦予機器人智能,使機器人能夠運動、感知周圍的環(huán)境和服
2017-08-01 18:21:38
物理交互納入智能系統(tǒng)的核心要素。
第3章是探討機器人計算系統(tǒng)。這一章節(jié)詳細闡述了自主機器人的軟硬件架構(gòu)。計算系統(tǒng)需要滿足機器人任務對算法的精度、實時性和功耗要求。書中介紹的多傳感器融合定位技術包含兩個
2024-12-19 22:26:26
精度有待提高,本項目是基于多傳感器的融合算法,通過采用MEMS運動傳感器,使用TI的C6000系列DSP實現(xiàn)對傳感器采集數(shù)據(jù)的融合,結(jié)合定位算法,實現(xiàn)對工業(yè)機器人的精確定位,提高工業(yè)機器人的重復定位精度和絕對定位精度。
2015-09-10 11:13:49
對不同的多傳感器信息融合算法效果進行評估,經(jīng)常需要采用相同的實驗環(huán)境、相同的數(shù)據(jù)源,因此進行建立實驗過程的數(shù)據(jù)采集平臺的研究,可以避免不必要的重復實驗和不可重現(xiàn)的實驗過程。本文在介紹虛擬儀器及其軟件開發(fā)
2011-12-31 10:48:28
軸姿態(tài)傳感器、GPS定位器、攝像頭、各種傳感器等設備,可以自己規(guī)劃路線進行巡航,也可以根據(jù)預規(guī)定的路線進行行走,可以用做掃地清潔機器人、安全巡檢機器人等。如果有幸能夠申請到香橙派zero的話我會第一時間發(fā)布外觀等評測貼,并在評測器件發(fā)表多篇原創(chuàng)香橙派的技術文章,并完成自己的輪式機器人的設計。謝謝。
2016-12-08 16:09:34
.基于多傳感器的數(shù)據(jù)融合算法研究[J].現(xiàn)代電子技術,2020,43(10):10-13.DOI:10.16652/j.issn.1004-373x.2020.10.003.[2]宋坤,李雨婷,張鈺穎等
2023-12-26 20:59:02
多傳感器信息融合技術綜合了概率統(tǒng)計、信號處理、人工智能、控制理論等多個學科的最新科研成果,為機器人精確、全面、實時地感知各種復雜的、動態(tài)的、不確定的未知環(huán)境提供了一種先進的技術手段。在研究基于多
2020-08-18 07:43:38
在機器人旁通過屏幕查詢信息。顯示部分使用串口屏顯示傳感器的信息,并且給來找人和咨詢事情的人提供查詢信息。通觸摸屏設計的多級式菜單設定外來人員的需求信息,增進了人機交互的靈活性。 最后,本設計實現(xiàn)了一款具有安
2018-09-04 16:00:33
本系統(tǒng)所設計的機器人的主要任務是在未知環(huán)境下依靠多傳感器信息,運用D-S數(shù)據(jù)融合算法,提供與環(huán)境有關的關于系統(tǒng)狀態(tài)的足夠的與可靠的信息,使機器人能夠自主規(guī)劃路徑、躲避障礙物,最終向目標靠近
2018-11-01 15:08:27
對敵方干擾的脆弱性,提高系統(tǒng)可靠性,現(xiàn)已廣泛應用于各個領域。因此,本文選取雷達與紅外雙模導引頭作為傳感器,模擬生成多傳感器的數(shù)據(jù)生成模塊,為多模型機動目標跟蹤算法提供良好的檢測平臺。 毫米波雷達導引頭
2018-12-05 15:16:23
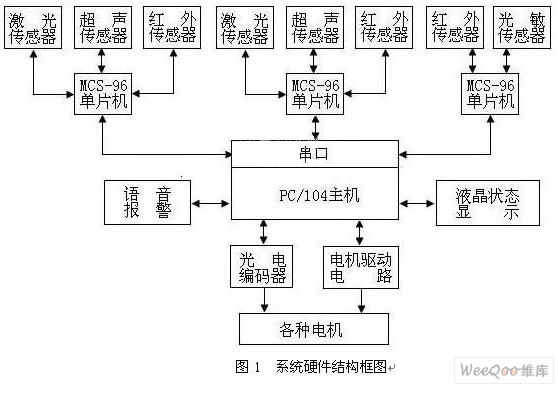
協(xié)調(diào)完成多傳感信息的融合,而運動執(zhí)行層完成機器人行走。圖1為智能導覽機器人的總體結(jié)構(gòu)框圖。3 導覽機器人硬件設計3.1 人工智能層硬件實現(xiàn) 考慮到移動機器人控制系統(tǒng)要求處理速度快、方便外圍設備擴展
2019-07-04 08:30:00
多傳感器信息融合是指協(xié)調(diào)使用多個傳感器,把分布在不同位置的多個傳感器所提供的局部不完整觀測量及相關聯(lián)數(shù)據(jù)庫中的相關信息加以綜合,消除多傳感器信息之間可能存在的冗余和矛盾,并加以互補,降低其不確定性
2018-11-12 10:49:55
。當多個傳感器位于同一位置時,可以創(chuàng)建令人興奮的新功能,并且可以交換和增強單個測量。在這些類型的設計中,傳感器可以實現(xiàn)高級功能,通常被稱為傳感器“融合”,提供新的和創(chuàng)新的功能。 傳感器融合算法已經(jīng)在
2019-07-12 06:45:44
采用CarlsON 最優(yōu)數(shù)據(jù)融合準則, 將基于Kalman 濾波的多傳感器狀態(tài)融合估計方法應用到雷達跟蹤系統(tǒng)。仿真實驗表明,多傳感器Kalman 濾波狀態(tài)融合估計誤差小于單傳感器Kalman 濾波得出的狀態(tài)估計誤差,驗證了方法對雷達跟蹤的有效性。
2020-04-06 07:42:16
作者:Joy Yang1.什么是姿態(tài)融合算法簡單來說,姿態(tài)融合算法就是融合多種運動傳感器數(shù)據(jù)(一般需要3軸加速度, 3軸陀螺儀或者3軸地磁感應傳感器),通過數(shù)字濾波算法容錯補償,實現(xiàn)當前姿態(tài)檢測
2019-07-19 06:47:49
機器人的多傳感器系統(tǒng)機器人智能技術中最為重要的相關領域是機器人的多感覺系統(tǒng)和多傳感信息的集成與融合,統(tǒng)稱為智能系統(tǒng)的硬件和軟件部分。視覺、聽覺、力覺、觸覺等外部傳感器和機器人各關節(jié)的內(nèi)部傳感器信息融合
2010-12-22 09:55:49
`機器人不僅需要人工智能(AI)才能實現(xiàn)自主。他們還需要大量傳感器,傳感器融合以及邊緣的實時推理。之前我們已經(jīng)嘗到了深度卷積神經(jīng)網(wǎng)絡的好處,如今來自激光雷達的更高數(shù)據(jù)處理的需求正在推動神經(jīng)網(wǎng)絡到
2019-04-16 10:07:33
本文介紹了幾類常用的無線傳感器網(wǎng)絡數(shù)據(jù)融合算法,并比較了其優(yōu)缺點。
2021-06-03 06:41:59
D-S證據(jù)理論概述及改進改進的D-S理論信息融合算法在ETC系統(tǒng)中的應用研究
2021-05-14 06:12:39
由于無線傳感器網(wǎng)絡中節(jié)點的能量十分有限,因此在設計各種網(wǎng)絡協(xié)議時必須考慮節(jié)能。采用網(wǎng)內(nèi)數(shù)據(jù)處理技術是降低能耗的重要手段,而數(shù)據(jù)融合與數(shù)據(jù)路由相結(jié)合是實現(xiàn)網(wǎng)內(nèi)數(shù)據(jù)處理的重要方法l-3]。數(shù)據(jù)融合能減少數(shù)據(jù)
2023-09-21 08:29:44
,來實現(xiàn)機器人性能目標。這通常被稱為傳感器融合,支持傳感器系統(tǒng)利用各個傳感器的優(yōu)勢生成更準確的數(shù)據(jù)和更好的產(chǎn)品設計。例如,一些無法利用GPS模塊導航信號進行室內(nèi)定位的系統(tǒng),可以采用WiFi基站三角測量
2015-02-04 16:35:49
模態(tài)精準感知信息,使自動駕駛系統(tǒng)可以實時精準地感知道路上的各種狀況。
昱感微融合感知產(chǎn)品方案創(chuàng)新性地 將可見光攝像頭、紅外攝像頭以及4D毫米波雷達的探測數(shù)據(jù)在前端(數(shù)據(jù)獲取時)交互,將各傳感器的探測
2024-04-11 10:26:51
控制和通信 IC 的發(fā)展在實現(xiàn)下一代的機器人中起到重要作用。然而,這些復雜的現(xiàn)代機器人的核心是許多新的、小型化和低成本的傳感技術的出現(xiàn)與融合。對實現(xiàn)下一代機器人至關重要的幾項關鍵傳感器技術包括磁性位置傳感器、存在傳感器、手勢傳感器、力矩傳感器、環(huán)境傳感器和電源管理傳感器。
2019-07-31 07:46:31
傳感器無法得出的結(jié)果。 方向和慣性導航專家采用為特定類別的應用設計的一系列傳感器融合算法。 這些算法的細節(jié)不在本文的探討范圍內(nèi),但每種算法都力求優(yōu)化原始傳感器數(shù)據(jù)的合并,這些數(shù)據(jù)經(jīng)傳感器噪聲和精度等各種
2017-04-07 15:13:53
`現(xiàn)在的社會狀況,老齡化越來越大,隨著年紀的增長,吃飯手抖,行走不方便,這些都是年齡增大都要經(jīng)歷的事情。智能關注老人生活健康,針對行動不方便,工業(yè)設計公司設計出了這款老人攙扶機器人設計,用來輔助
2020-10-12 17:42:40
摘要:文章分析了目前一些數(shù)據(jù)融合算法中對先驗信息要求苛刻,定義數(shù)據(jù)間支持度中門限預先設定對融合結(jié)果的不利影響,提出了一種實用的數(shù)據(jù)融合算法,該算法中定義了一種新
2009-01-18 23:20:55 16
16 該文提出了改善傳感器測量穩(wěn)定性的一種新方法。該方法的基本思路是將影響傳感器輸出穩(wěn)定性的因子作為傳感器融合系統(tǒng)的輸入模式,基于系統(tǒng)辨識理論實現(xiàn)融合算法。實驗結(jié)果
2009-06-19 15:11:3318 多傳感器信息融合位置級融合算法中, 測量融合(Measurement fusion) 算法是最優(yōu)的。本文證明了測量融合算法的估計方差由系統(tǒng)的“測量函數(shù)”決定。該函數(shù)值越大, 系統(tǒng)的融合估計方差
2009-07-02 09:05:4210 將多傳感器對某一狀態(tài)的測量結(jié)果分組, 針對每組測量變量的算術平均值, 依據(jù)極大似然原理, 提出了多傳感器分組加權融合算法. 通過對各組傳感器測量值的方差進行估計,從而對每
2009-07-03 09:35:0614 多傳感器數(shù)據(jù)融合雖然未形成完整的理論體系和有效的融合算法, 但是在不少應用領域根據(jù)各自的具體應用背景, 已經(jīng)提出了許多成熟并且有效的融合方法。
2009-07-04 08:47:3913 為了對隨機擾動環(huán)境中得到的管道壁厚測量數(shù)據(jù)進行穩(wěn)健融合估計, 提出了一種多傳感器測量數(shù)據(jù)的切尾加權融合算法。利用數(shù)據(jù)探測技術中的切尾均值概念構(gòu)造最優(yōu)加權因子, 從而
2009-07-04 09:17:206 介紹多傳感器數(shù)據(jù)融合的模型和基本方法及在智能傳感器中的應用。中文還給出個數(shù)據(jù)融合在智能長安區(qū)系統(tǒng)中的應用實例。
2009-07-06 09:20:3331 基于D2S(Dempster2Shafer) 證據(jù)理論,比較和研究了相關數(shù)據(jù)和不相關數(shù)據(jù)的融合方法,分析了多傳感器數(shù)據(jù)融合的算法:集中式融合算法和分布式融合算法. 經(jīng)過實驗證明,執(zhí)行分布式有反饋
2009-07-10 09:22:188 本文基于最優(yōu)估計理論,提出了一種多傳感器分散估計融合算法,以解決測量噪聲干擾下參數(shù)估計 問題。該方法不要求知道測量數(shù)據(jù)的先驗知識,在減少測量誤差方面比傳統(tǒng)的集中估計
2009-07-10 15:32:2920 針對多傳感器觀測環(huán)境下帶乘性噪聲系統(tǒng)的逆向最優(yōu)濾波與反褶積融合估計問題, 本文提出了1 種基于極大似然準則的最優(yōu)融合算法。該算法中各單傳感器間并行計算, 并且融合
2009-07-11 16:27:5510 本文提出了一種多傳感器單目標空間位置融合處理算法, 利用該算法可以獲取飛行目標的最佳運動軌跡1 經(jīng)模擬計算, 表明該算法是對飛行目標測量數(shù)據(jù)進行融合處理的一種較為理
2009-07-13 11:27:4221 本文介紹多目標跟蹤的用多維數(shù)據(jù)互聯(lián)的多傳感器融合算法的發(fā)展。這項工作是受大規(guī)模監(jiān)視問題的推動,在這種監(jiān)視問題中,來自具有不同采樣間隔(電子掃描陣(ESD)雷達)的異步
2009-07-13 11:59:1911 在實際系統(tǒng)中,常用的數(shù)據(jù)融合方法是基于擴展的卡爾曼濾波算法的融合算法,但是這種融合算法的跟蹤精度并不是很高. 通過對濾波跟蹤型數(shù)據(jù)融合的研究,提出了基于轉(zhuǎn)換測量值卡爾
2009-07-14 11:28:0015 通過構(gòu)建一個多傳感器信息融合算法的仿真測試系統(tǒng),模擬了多種實際戰(zhàn)場環(huán)境,對不同信息融合算法的測試結(jié)果的統(tǒng)計與分析I綜合性能評估領域已有的研究成果,建立了完整的多
2009-07-16 14:07:4819 機器人手爪上裝有多種傳感器,為了保證手爪能安全、可靠地抓取工件,必須對這些傳感器的數(shù)據(jù)進行融合。本文介紹手爪是哪個傳感器的配置情況。
2009-07-17 10:58:1320 為解決多平臺協(xié)同數(shù)據(jù)融合問題,采用基于D-S 證據(jù)理論的數(shù)據(jù)融合方法,分析了該理論在多平臺協(xié)同數(shù)據(jù)融合中的應用原理,并將此方法運用于艦船類型的識別。通過MATLAB 仿真
2009-08-04 14:43:0723 針對分布式多傳感器數(shù)據(jù)融合系統(tǒng),提出了一種多傳感器異步航跡融合算法。由于不同傳感器的采樣時間各不相同,融合算法首先利用最小二乘法將局部航跡統(tǒng)一到融合中心的融合
2009-08-07 09:47:5812 無線傳感器網(wǎng)絡中采集的數(shù)據(jù)存在著較大的冗余與誤差,造成能量消耗過多,并且影響數(shù)據(jù)的可靠性。針對這個問題提出一種基于定向擴散與分批估計的數(shù)據(jù)融合算法,對監(jiān)測同
2009-09-01 09:55:0511 移動代理被認為是無線傳感器網(wǎng)絡中解決數(shù)據(jù)融合的有效方法,但代理訪問節(jié)點的次序以及總數(shù)對算法有較大影響,為此該文提出一種基于Bayes 序貫估計的移動代理數(shù)據(jù)融合算法.該
2009-11-20 16:34:4121 本文詳細闡明了多傳感器信息融合的一種方法D—S證據(jù)理論,他是一種處理不確定性問題的有用方法,并且闡述了D-S證據(jù)理論在傳感器信息融合的移動機器人上的應用
2009-12-18 11:30:378 研究了基于神經(jīng)網(wǎng)絡的多傳感器融合技術,并將其應用于自主吸塵機器人中。給出了神經(jīng)網(wǎng)絡傳感器融合技術的基本原理,探索了改進的BP 信息融合算法,使得改進后的算法在收斂
2009-12-31 12:00:1411 基于COM的數(shù)據(jù)融合算法測試平臺開發(fā)
建立了一個基于COM技術的數(shù)據(jù)融合算法測試平臺,把數(shù)據(jù)融合算法封裝到組件中,并定義了一種COM接口規(guī)范,為算法調(diào)用提供了一
2010-02-22 15:45:418 基于傳感器采集的醫(yī)療數(shù)據(jù)不能全面準確的反映病人身體狀況的情況,本系統(tǒng)采用多路傳感器采集脈搏、心音、呼吸音信號進行特征提取,通過D-S證據(jù)理論的融合做出診斷;當診斷為危
2010-07-15 16:36:1730 摘要:在基于卡爾曼濾波及其一些改進算法中,由于測量方差預先設定,從而導致濾波發(fā)散和信息資源的浪費,為此提出了一種動態(tài)加權下測量方差時變的多傳感器融合算法。該
2010-12-30 19:54:5827 ;多模態(tài)傳感融合:全方位設備狀態(tài)監(jiān)測集成紅外熱成像儀、高清相機,通過多傳感器數(shù)據(jù)融合算法將檢測準確率提升至99.2%。 智能分析平臺:邊緣計算與云端協(xié)同
2025-11-06 09:44:02
一種改進的多傳感器加權融合算法
引言
多傳感器數(shù)據(jù)融合是近幾年迅速發(fā)展的一門信息綜合處理技術,它將來自多傳感器或是多源的信息和數(shù)據(jù)進行綜合
2009-12-12 10:32:35 2546
2546 Particle Swarm Optimization, BPSO)方法的多傳感器特 征融合算法。利用新的基于概率密度估計的相對微
2011-02-25 15:32:1938 多源遙感圖像融合作為圖像融合領域的一個重要分支,已經(jīng)成為遙感技術領域的研究熱點,本文研究了多源遙感圖像融合算法
2011-06-22 15:49:4829 針對無線傳感器網(wǎng)絡的節(jié)點能量有限,且在進行信息傳輸時存在數(shù)據(jù)沖突、傳輸延時等問題,提出并設計了基于最大生存周期的無線傳感器網(wǎng)絡數(shù)據(jù)融合算法。該算法將整個網(wǎng)絡中的節(jié)
2013-05-06 11:41:3836 基于粗神經(jīng)網(wǎng)絡的仿人智能機器人的語音融合算法研究電子論文!資料來源網(wǎng)絡,如有侵權,敬請見諒
2015-11-30 11:34:244 無人車在運行過程中,需要利用多傳感器系統(tǒng)對周圍道路環(huán)境進行觀測,但這些傳感器獲取的數(shù)據(jù)信息存在著超載,丟失或不精確等問題,則需采用數(shù)據(jù)融合技術對所獲數(shù)據(jù)加以優(yōu)化處理。本文基于無人車的多傳感器系統(tǒng),對加權平均數(shù)據(jù)融合算法進行了研究,符合無人車運行環(huán)境下融合層次的要求,在實際的數(shù)據(jù)融合處理中具有很高的可行性。
2015-12-18 16:03:0517 機器人多傳感器信息融合測距系統(tǒng)設計....
2015-12-23 15:00:2416 介紹基于傳感器技術的機器人設計的硬件框架和部分算法
2016-05-09 10:15:227 一種改進的多傳感器信息融合算法_夏菽蘭
2017-01-03 15:24:450 基于蟻群優(yōu)化的無線傳感器網(wǎng)絡數(shù)據(jù)融合算法_李麗
2017-01-07 19:00:392 無線傳感器網(wǎng)絡數(shù)據(jù)融合算法的改進與實現(xiàn)_邊鵬飛
2017-01-19 21:54:151 基于模糊熵的多傳感器加權融合算法_王晶晶
2017-03-22 09:06:400 基于傳感器采集的醫(yī)療數(shù)據(jù)不能全面準確的反映病人身體狀況的情況,本系統(tǒng)采用多路傳感器采集脈搏、心音、呼吸音信號進行特征提取,通過D-S證據(jù)理論的融合做出診斷。
2017-09-20 15:07:567 針對粒子濾波中存在粒子質(zhì)量低和粒子貧化的問題,提出了一種基于智能粒子濾波的多傳感器信息融合算法。該算法分為兩個模塊,首先,將多傳感器數(shù)據(jù)發(fā)送給相應的粒子濾波計算模塊,以優(yōu)化粒子分布為目的更新建議分布
2017-12-08 17:08:371 雙眼,幫助其觀察周遭環(huán)境。但僅有雙眼想實現(xiàn)智能行走還是不夠的,必須融合激光雷達、深度攝像頭、超聲波、防跌落等多種傳感器數(shù)據(jù),配合導航算法,才能實現(xiàn)智能行走。當機器人在復雜多變,環(huán)境不受控制的應用場
2019-02-28 09:10:11896 
本文從建立偽量測方程的角度,提出了一種異質(zhì)多傳感器的異步量測融合算法,該算法是通過在融合中心建立偽量測方程使各傳感器的數(shù)據(jù)同步,然后利用同步的思想進行處理,最后通過計算機仿真進行了驗證。
2019-04-30 14:25:131995 
多傳感器信息融合方法大致可以分為三類,即,概率統(tǒng)計方法、邏輯推理方法和學習方法。使用模糊推理、D-S證據(jù)理論和產(chǎn)生式規(guī)則的方法進行信息融合,這些方法都屬于邏輯推理的范疇;使用神經(jīng)網(wǎng)絡的方法進行信息融合,該方法屬于學習方法的范疇,依據(jù)這些融合算法,均達到了預期效果。
2020-01-27 16:16:002655 
機器人底盤的技術壁壘在于,不同場景下的多傳感器的融合具有一定的技術門檻。從物理層面上來看,機器人底盤則主要是眾多傳感器的集成,激光雷達、雙目視覺、超聲、紅外、以及輪轂電機、輪子等必要的懸掛。
2019-12-25 15:21:35928 達摩院自研高精定位系統(tǒng)完成最新一次迭代,基于多傳感器融合的緊耦合算法,實現(xiàn)了不依賴GPS信號的厘米級定位。該系統(tǒng)已部署于達摩院無人物流車隊,通過軟硬件一體化設計,以10%的成本達到業(yè)界領先定位水準。
2020-06-04 17:54:145269 本系統(tǒng)所設計的機器人的主要任務是在未知環(huán)境下依靠多傳感器信息,運用D-S數(shù)據(jù)融合算法,提供與環(huán)境有關的關于系統(tǒng)狀態(tài)的足夠的與可靠的信息,使機器人能夠自主規(guī)劃路徑、躲避障礙物,最終向目標靠近。
2021-04-07 10:44:302972 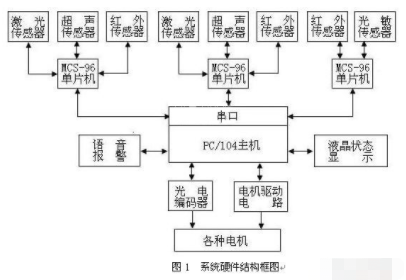
“INDEMIND:隨著機器人的應用領域不斷拓展,對機器人的環(huán)境感知能力的要求也在不斷提升,而要解決環(huán)境感知問題,傳感器技術則是最重要的應用支撐技術之一,它對于機器人的意義亦如人眼對于人,但與人眼不同的是,它的構(gòu)成主要由傳感器和算法組成,并伴隨著機器人發(fā)展,已從單傳感器向多傳感器融合迭代。”
2022-03-25 15:40:335304 因為多傳感器的使用會產(chǎn)生大量需要處理的數(shù)據(jù),因此通常通過融合算法來對數(shù)據(jù)進行優(yōu)化。不同傳感器采集到的信息可能相互之間可能會不同甚至是有矛盾,使用融合算法可以幫我們弄懂如何保證系統(tǒng)能夠準確處理這些數(shù)據(jù),使系統(tǒng)最終做出及時、正確的決策,這非常重要。
2022-03-30 16:29:3723985 
近年來,多傳感器融合算法發(fā)展迅猛,不同傳感器可以相互補充,通過融合提高系統(tǒng)的感知能力。但受限于標定成本和時間同步問題,多傳感器數(shù)據(jù)集卻不多。
2022-09-29 14:53:302873 最近在做特征級別的感知結(jié)果融合算法。我的工作目的,是要將多種不同傳感器的感知結(jié)果,通過一定的機制融合起來,得到融合后的感知結(jié)果。
2023-05-29 09:26:482110 
多傳感器數(shù)據(jù)融合是一個綜合處理多傳感器數(shù)據(jù)的過程,以提高對環(huán)境或目標的感知和解釋能力。在這個過程中,各種數(shù)據(jù)融合算法起著至關重要的作用。本文將深入探討多傳感器數(shù)據(jù)融合算法中最關鍵的方面。 一、傳感器
2023-12-13 11:00:011929 電子發(fā)燒友網(wǎng)站提供《3D霍爾效應傳感器在機器人設計中的機械優(yōu)勢.pdf》資料免費下載
2024-09-03 11:36:270  電子發(fā)燒友App
電子發(fā)燒友App








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論