 電子發(fā)燒友App
電子發(fā)燒友App



紅外背景抑制與小目標(biāo)分割檢測(cè)
紅外尋的導(dǎo)引頭小目標(biāo)圖像的分割與檢測(cè)是地空導(dǎo)彈和艦空導(dǎo)彈的關(guān)鍵技術(shù).本文研究用六種高通濾波器抑制大面積低頻背景的效果與性能比較,在此基礎(chǔ)上提出基于統(tǒng)計(jì)計(jì)算均值和直方圖的自適應(yīng)門限背景抑制與小目標(biāo)分割方法.基于目標(biāo)運(yùn)動(dòng)的連續(xù)性、規(guī)律性和噪聲的隨機(jī)性,研究連續(xù)性濾波器的設(shè)計(jì)和用流水線管道結(jié)構(gòu)檢測(cè)目標(biāo)運(yùn)動(dòng)軌跡的方法.大量實(shí)驗(yàn)和比較結(jié)果檢驗(yàn)了本文方法的正確性.
關(guān)鍵詞:紅外圖像;背景抑制;高通濾波;自適應(yīng)門限;目標(biāo)分割;目標(biāo)檢測(cè)
Infrared Background Suppression for Segmenting and Detecting Small Target
PENG Jia-xiong,ZHOU Wen-lin
(Institute of Pattern Recognition and Artificial Intelligence,Huazhong University of Science and Technology,Wuhan 430074,China)
Abstract:The segmentation and detection of samll target image for infrared homing guidance head are crucial technologies for ground-air and surface-air missiles.This paper studies the effect and performance comparison of suppressing large area and low frequency background by use of six high-pass filters.Based on this,we propose an adaptive threshold method of background suppression and small target segmentation using image mean and histogram.In view of the continuity and regularity of motion for target and the randomness for noise,the design of continuity filter and a technique via assembly line and pipeline scheme to detect target trajectory are considered.The methods researched here are verified by a large number of results of experiments and comparisons.
Key words:infrared image;background suppression;high-pass filtering;adaptive threshold;target segmentation;target detection
一、引 言
為了盡可能早地發(fā)現(xiàn)目標(biāo),使防御武器有足夠的反應(yīng)時(shí)間,要求目標(biāo)在很遠(yuǎn)處就能被檢測(cè)到,這時(shí)目標(biāo)的圖像很小,只有一個(gè)或幾個(gè)像素的面積.另一方面接收器內(nèi)的噪聲及背景雜波干擾又往往較強(qiáng),因而是一個(gè)低信噪比的小目標(biāo)分割與檢測(cè)問題.小目標(biāo)分割與檢測(cè)性能的好壞將直接決定紅外自動(dòng)尋的末制導(dǎo)系統(tǒng)的有效作用距離及設(shè)備的復(fù)雜程度,是一個(gè)必須解決的關(guān)鍵問題.
由于小目標(biāo)的像元個(gè)數(shù)很少,缺乏目標(biāo)的結(jié)構(gòu)信息,單從灰度來看,難于同噪聲區(qū)別開來,一般基于灰度的運(yùn)動(dòng)目標(biāo)檢測(cè)方法無(wú)法采用,可供分割與檢測(cè)算法利用的信息很少.國(guó)外學(xué)者從七十年代末期開始,經(jīng)過十多年對(duì)小目標(biāo)分割與檢測(cè)問題的深入研究已取得了不少成果,總的來說,對(duì)該問題的研究一般都圍繞以下兩個(gè)實(shí)際背景展開,一是空載下視系統(tǒng)如星載系統(tǒng)對(duì)低空及地面目標(biāo)的監(jiān)視;一是低空或地面系統(tǒng)對(duì)星空背景中目標(biāo)的監(jiān)視.由前人所做的工作看出,運(yùn)動(dòng)小目標(biāo)分割與檢測(cè)之關(guān)鍵在于解決沿未知目標(biāo)軌跡的快速能量積累問題,即把運(yùn)動(dòng)小目標(biāo)分割與檢測(cè)問題看成是目標(biāo)軌跡搜索及根據(jù)能量積累作出判決的過程,也就是根據(jù)目標(biāo)運(yùn)動(dòng)的連續(xù)性和規(guī)則性來檢測(cè)目標(biāo).
對(duì)于背景抑制與小目標(biāo)檢測(cè)問題,Bauch等人通過采用一組時(shí)間上的高階差分來抑制背景干擾,并得到目標(biāo)運(yùn)動(dòng)軌跡[1].有一些工作集中于用動(dòng)態(tài)規(guī)劃和狀態(tài)估計(jì)技術(shù)來增加目標(biāo)的可檢測(cè)性[2,3].然而,它們?cè)诘托旁氡惹闆r下可能呈現(xiàn)差的性能.此后,文獻(xiàn)[4,5]提出了頻域中的三維時(shí)空匹配濾波技術(shù).它已經(jīng)被簡(jiǎn)化為只在空域中進(jìn)行的二維匹配濾波但在時(shí)間序列中進(jìn)行遞推求和[6].最近文獻(xiàn)[7]又進(jìn)一步發(fā)展成為基于線性變系數(shù)差分方程的方法.M.Irani等人用計(jì)算像素小鄰域上灰度差的加權(quán)平均再用梯度進(jìn)行規(guī)一化,以此作為運(yùn)動(dòng)的度量[8].他們首先辯識(shí)有純平移運(yùn)動(dòng)的區(qū)域并分割相應(yīng)于計(jì)算運(yùn)動(dòng)的區(qū)域,再對(duì)分割的區(qū)域計(jì)算一個(gè)高階參數(shù)變換(仿射變換,射影變換,等等)來改善運(yùn)動(dòng)估計(jì)并迭代上述步驟直至收斂.另一個(gè)由S.P.Liou和R.C.Jian提出的運(yùn)動(dòng)檢測(cè)方法是基于時(shí)空空間中運(yùn)動(dòng)軌跡任一點(diǎn)上切線和法線的正交性[9].但是為了得到圖像函數(shù)的時(shí)間和空間偏導(dǎo)數(shù),必須實(shí)時(shí)完成在時(shí)空空間中的三維曲面擬合,從而增加了計(jì)算量.Bir Bhanu和D.H.Richard使用圖像分割方法來檢測(cè)運(yùn)動(dòng)目標(biāo)[10].然而在許多情況下,從復(fù)雜的前景和背景中分割出運(yùn)動(dòng)目標(biāo)是很困難的任務(wù).
光流法[11~13]是文獻(xiàn)中最常見的方法.但是它很耗時(shí)而且在有些情況中不可用,例如有階躍邊緣和遮擋的情況.在這些情況下,光流的連續(xù)性不能得到保證.最近,檢測(cè)單像速目標(biāo)運(yùn)動(dòng)軌跡的一種有效方法在文獻(xiàn)[14]中提出來了.這個(gè)方法是基于準(zhǔn)連續(xù)性濾波器來抑制大量的噪聲,把軌跡的性質(zhì)嵌入到一個(gè)代價(jià)函數(shù)中并把軌跡檢測(cè)問題歸結(jié)代價(jià)函數(shù)的最小化問題.但是這個(gè)方法僅僅對(duì)于二值化圖像是可用的.L.I.Perlovsky等人基于使用內(nèi)部世界模型的十個(gè)方程式所定義的MLANS非線性神經(jīng)網(wǎng)絡(luò)系統(tǒng),描述了一個(gè)自動(dòng)目標(biāo)識(shí)別方法和一個(gè)有關(guān)的非合作辨別敵友的問題[15].這些模型在MLANS中對(duì)大量的神經(jīng)網(wǎng)絡(luò)權(quán)系數(shù)進(jìn)行編碼并且MLANS用一些先驗(yàn)樣本進(jìn)行學(xué)習(xí).還有一些其他的運(yùn)動(dòng)檢測(cè)方法,如M.V.Srinivasan提出的基于微分的廣義梯度方案[16],S.D.Blostein和T.S.Huang提出的使用假設(shè)檢驗(yàn)的方法[17],R.C.Nelson提出的用運(yùn)動(dòng)觀測(cè)器檢測(cè)運(yùn)動(dòng)的方法[18]和W.B.Schaming提出的借助于Bayes統(tǒng)計(jì)量的像素分類法[19],等等.后者僅能用于檢測(cè)相鄰兩幀之間目標(biāo)的小運(yùn)動(dòng),因?yàn)樵摲椒ㄖ惺褂玫淖赃m應(yīng)門多特征像素分類器已經(jīng)假設(shè)了兩幀間的運(yùn)動(dòng)是小的.我國(guó)在小目標(biāo)分割與檢測(cè)方面也做了大量的工作.由國(guó)防科技大學(xué)、同濟(jì)大學(xué)、上海交通大學(xué)、華中理工大學(xué)共同參加的紅外導(dǎo)引頭信息處理機(jī)的研制已取得了一定的成果.相繼提出了迭代統(tǒng)計(jì)平均檢測(cè)法,HOPFIELD神經(jīng)網(wǎng)絡(luò)法、全局搜索法等小目標(biāo)檢測(cè)方法.
總的來說,上述方法存在的問題在于:在低信噪比情況下,目標(biāo)點(diǎn)極易被噪聲所淹沒.單幀圖像處理不能實(shí)現(xiàn)對(duì)目標(biāo)的可靠分割與檢測(cè),必須對(duì)圖像序列進(jìn)行處理.這樣,在目標(biāo)運(yùn)動(dòng)特性未知或可能的取值范圍較大的情況下,實(shí)現(xiàn)分割與檢測(cè)需要的計(jì)算量和存貯量將難以負(fù)擔(dān).解決目標(biāo)自動(dòng)檢測(cè)問題的常用方法是首先進(jìn)行圖像分割,然后結(jié)合有關(guān)目標(biāo)的知識(shí),從分割后圖像的各個(gè)連通區(qū)域塊(稱為候選目標(biāo)塊)中確定真實(shí)目標(biāo).由于噪聲的存在和背景的復(fù)雜性,為了提高目標(biāo)的信噪比,故要進(jìn)行背景抑制濾波和分割,然后檢測(cè).
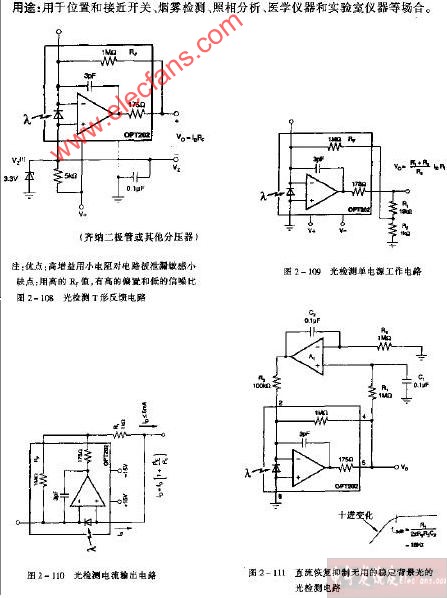
本文是將小目標(biāo)特征分析與分割檢測(cè)緊密聯(lián)系起來,把小目標(biāo)分割與檢測(cè)分為兩個(gè)步驟進(jìn)行.通常目標(biāo)比背景要亮,目標(biāo)像素雖少但卻位于高灰度區(qū),遠(yuǎn)遠(yuǎn)大于平均灰度.首先用平均灰度作為門限,對(duì)灰度小于等于門限的背景像素進(jìn)行均值化處理,分割出高灰度的背景像素和目標(biāo)像素.然后對(duì)均值化處理后的圖像作直方圖,在對(duì)各種高通濾波器作充分比較的基礎(chǔ)上,提出一種基于直方圖峰值的自適應(yīng)門限分割方法.該方法自適應(yīng)地統(tǒng)計(jì)背景特性,用作抑制紅外背景的依據(jù).從而能有效地去除背景,分割出若干高灰度的孤立噪聲和目標(biāo),為小目標(biāo)檢測(cè)創(chuàng)造了良好條件.
二、背景抑制濾波器
對(duì)于小目標(biāo)而言,缺乏形狀和結(jié)構(gòu)信息.如果要檢測(cè)到它的存在,必備的條件是:目標(biāo)的灰度與背景有一定差異,否則無(wú)法識(shí)別.因此,我們需要注意的是圖像中那些灰度奇異點(diǎn),這些點(diǎn)才有可能是目標(biāo).從圖像中提取可能的目標(biāo)點(diǎn),去除一般像素點(diǎn),可以盡量減少背景和其它噪聲對(duì)目標(biāo)檢測(cè)過程的影響.
從圖像序列中檢測(cè)小目標(biāo)時(shí),如果直接將這些含有大量噪聲的圖像疊加來累積信號(hào)能量,由于小目標(biāo)本身的運(yùn)動(dòng),相加后圖像的信噪比不會(huì)提高.相反,會(huì)由于噪聲的存在而形成許多類似小目標(biāo)運(yùn)動(dòng)軌跡的線段,使圖像的信噪比降低.所以在各幀圖像疊加以前需進(jìn)行預(yù)處理濾波,圖像預(yù)處理的目的是為了減少各幀圖像的噪聲,提高信噪比,避免過多的噪聲給檢測(cè)帶來困難.
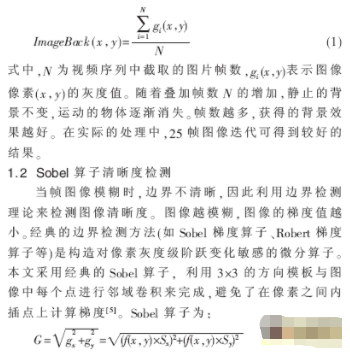
利用紅外傳感器等獲取的小目標(biāo)圖像,背景除了有在空間不相關(guān)的噪聲外,主要是大面積緩慢變化的低頻部分.例如飛機(jī)在云層中飛行,作為背景的云層本身不僅緩慢變化,而且具有一定的相關(guān)性.而小目標(biāo)亮度較背景高,與背景不相關(guān),是圖像中的孤立亮斑,故是圖像中的高頻部分.高通濾波器能抑制低頻分量,讓高頻分量暢道,故采用高通濾波器來進(jìn)行大面積的背景抑制,同時(shí)保留目標(biāo)和部分高亮度噪聲.
常用的高通濾波器分為空域和頻域兩類.若濾波器的輸入為函數(shù)f(x,y),輸出信號(hào)為g(x,y),設(shè)濾波器的脈沖響應(yīng)函數(shù)為h(x,y),用*表示卷積運(yùn)算,則
g(x,y)=f(x,y)*h(x,y) (1)
對(duì)于離散圖像,一般選用卷積模板表示濾波器的脈沖響應(yīng)函數(shù),記為矩陣H.我們?cè)O(shè)計(jì)了兩個(gè)空域5×5高通濾波器模板如下:

對(duì)于模板H1,中心像素權(quán)值最大,易通過,而周圍部分權(quán)值均為1,值小,不易通過.這樣,對(duì)于孤立噪聲點(diǎn)和小目標(biāo),信號(hào)強(qiáng)度高,易通過.而有一定面積的背景不易通過,這就可以較好地抑制背景.模板H2將中心高權(quán)值分布在十字形區(qū)域中,使權(quán)值分散,必然使濾波后的小目標(biāo)發(fā)生膨脹,面積變大,被濾掉的背景灰度變得更均勻.
因兩個(gè)函數(shù)卷積的Fourier變換等于這兩個(gè)函數(shù)Fourier變換的乘積,所以式(1)的頻域表示為:
G(u,v)=F(u,v)H(u,v) (2)
式中G(u,v)、F(u,v)、H(u,v)分別為g(x,y)、f(x,y)和h(x,y)的Fourier變換.頻域?yàn)V波器的關(guān)鍵是設(shè)計(jì)適當(dāng)?shù)膫鬟f函數(shù)H(u,v).通常選取理想高通濾波器(LHPF)、指數(shù)高通濾波器(EHPF)和Butterworth高通濾波器(BHPF).它們的傳遞函數(shù)如下:
![]() (3)
(3)![]() (4)
(4)
EHPF:H(u,v)=e-0.347[D0/D(u,v)]n (5)
式中:D0為截止頻率到原點(diǎn)的距離;![]() 為(u,v)點(diǎn)到原點(diǎn)的距離;n用以控制從原點(diǎn)算起的傳遞函數(shù)H(u,v)的增長(zhǎng)率.
為(u,v)點(diǎn)到原點(diǎn)的距離;n用以控制從原點(diǎn)算起的傳遞函數(shù)H(u,v)的增長(zhǎng)率.
我們比較研究了六種背景抑制的高通濾波法.實(shí)驗(yàn)圖像紅外傳感器輸出的在云層中飛行的小目標(biāo)圖像序列中的一幅,如圖1所示.原圖大小為204×283,但行列都按50%的比例顯示.圖2到圖6分別為空域和頻域?yàn)V波器處理后的圖像.


|
圖1 原圖像 |
圖2 H1模板處理圖 |


|
圖3 H2模板處理圖 |
圖4 理想濾波(D0=30.0) |


|
圖5 指數(shù)濾波(n=2,D0=30.0) |
圖6 巴特沃斯濾波(n=2,D0=30.0) |
| 比較看出,空域和頻域法均能抑制背景,但頻域法的濾波效果比空域法好,頻域中又以EHPF法最好,因?yàn)樗懈斓脑鲩L(zhǎng)率,比相應(yīng)的BHPF更好地保存了高頻分量.LHPF則有明顯的振鈴現(xiàn)象,且隨D0的減少而增加.但EHPF和BHPF在低、高頻之間過渡平滑,沒有明顯的振鈴現(xiàn)象.因背景局部區(qū)域像素變化大,空域?yàn)V波后,背景變亮而且分布更加不規(guī)則,以模板H1最為突出.為此,調(diào)整模板H1為模板H3,經(jīng)模板H3濾波后見圖7.實(shí)驗(yàn)表明,經(jīng)H3濾波后背景變得較暗,目標(biāo)也比H1清晰.可見對(duì)不同的圖像具有不同的最好權(quán)值,權(quán)值的選取很重要.另外,經(jīng)H3濾波后使目標(biāo)發(fā)生膨脹,中心部分變黑,這是由于H3平均中心權(quán)值的原因. |

|
圖7 H3模板處理圖
三、自適應(yīng)門限背景抑制與目標(biāo)分割
假定目標(biāo)比背景要亮,小目標(biāo)圖像主要位于高灰度區(qū),灰度遠(yuǎn)大于均值E.設(shè)f0(x,y)為目標(biāo)像素的灰度值,則f0(x,y)>>E,且灰度低于均值的像素必屬背景.故首先取E作為門限,循環(huán)地利用
來調(diào)整圖像的背景灰度.設(shè) R=灰度為E的像素?cái)?shù)目/圖像的總像素?cái)?shù)目 (8) 隨著比值R的增大,對(duì)待求的新均值E′產(chǎn)生越來越大的影響.當(dāng)R達(dá)到一定程度時(shí),E=E′,自動(dòng)退出循環(huán).此時(shí)大部分背景灰度為均值E,變得較均勻,目標(biāo)和較高灰度的背景保持不變.
將背景灰度置為均值E并保持目標(biāo)灰度,直至kmax≈m0結(jié)束循環(huán).至此,圖像中的背景灰度就變得十分均勻,而目標(biāo)則保持原灰度不變,還可能有一些灰度值較大的小噪聲點(diǎn)也保留了原灰度.但只要m0值估計(jì)得恰當(dāng),即可成功地抑制背景和噪聲而分離出小目標(biāo),如圖8所示.
圖8 自適應(yīng)法處理結(jié)果 |
 (9)
(9)


|
圖9 均值化后圖像的直方圖 通過對(duì)空域、頻域背景抑制濾波器和自適應(yīng)門限背景抑制法的試驗(yàn)看出:對(duì)于小目標(biāo)檢測(cè),空域和自適應(yīng)門限法對(duì)內(nèi)存要求低(只需分配兩倍的圖像大小內(nèi)存);頻域?yàn)V波器由于Fourier變換產(chǎn)生大量浮點(diǎn)型中間值不能釋放,故占用內(nèi)存大.在一般的IBM PC微機(jī)上會(huì)造成內(nèi)存分配困難而難以實(shí)現(xiàn).從運(yùn)算速度看,空域?yàn)V波器只需做乘法和加法運(yùn)算,運(yùn)行最快,自適應(yīng)門限法次之,頻域法最慢,但空域?yàn)V波器處理效果最差,自適應(yīng)門限法和頻域?yàn)V波器處理效果好.又由于自適應(yīng)門限對(duì)不同的圖像可進(jìn)行自適應(yīng)調(diào)整,因此它與頻域?yàn)V波器的通用性都好. 四、小目標(biāo)檢測(cè) |

|
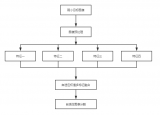
圖10 流水線管道結(jié)構(gòu) 每次管道更新后,在管道中移動(dòng)一個(gè)窗口序列,窗口尺寸為l×m.當(dāng)窗口移到有目標(biāo)的位置時(shí),由于目標(biāo)出現(xiàn)的連續(xù)性,必然有較多的可疑像素聚集于窗口內(nèi),窗內(nèi)像素的累加值會(huì)大于一個(gè)門限.如果沒有目標(biāo),由于噪聲的隨機(jī)分布性,窗內(nèi)像素的累加值就較小.從而我們可以檢測(cè)出流水線中間的一幀是否存在目標(biāo)并確定目標(biāo)的位置. |

|
圖11 目標(biāo)檢測(cè)流水線結(jié)構(gòu) 1.對(duì)于先進(jìn)入“與”管道的第n′幀二值圖像進(jìn)行數(shù)學(xué)形態(tài)學(xué)的膨脹運(yùn)算,得到一個(gè)掩膜幀,使原二值圖像為“1”的像素的小鄰域都為“1”;
其中(xi,yi)是窗口的中心坐標(biāo),j表示管道內(nèi)的第j幀.(3)將A1與門限T比較,若A1>T,則記入檢測(cè)幀;(4)在檢測(cè)幀中標(biāo)記目標(biāo)位置. 五、實(shí)驗(yàn)結(jié)果 |


|
圖12 原始圖像 |



|
圖13 自適應(yīng)法處理結(jié)果 圖13的實(shí)驗(yàn)結(jié)果表明,若m0選取得大于目標(biāo)面積,則有部分背景和少量噪聲會(huì)同目標(biāo)一樣殘留在圖中.m0越大,殘留的背景和噪聲越多.若m0選取得小于目標(biāo)面積,則有部分目標(biāo)像素會(huì)被當(dāng)作背景像素而抑制掉,使分割和檢測(cè)出的目標(biāo)變小.但從分割檢測(cè)出目標(biāo)的實(shí)時(shí)性和可靠性考慮,m0應(yīng)選取得略小于目標(biāo)面積.這樣雖會(huì)使目標(biāo)面積減小,但卻提高了對(duì)目標(biāo)的分割速度和增強(qiáng)了對(duì)背景的抑制,因而是實(shí)際應(yīng)用中所期望的.在實(shí)際應(yīng)用中,可通過仿真試驗(yàn)確定合適的m0值.在我們的實(shí)驗(yàn)中,比較圖13的結(jié)果可見,選取m0=100或更小是合適的.經(jīng)過自適應(yīng)法處理后,目標(biāo)不僅被較好地保留下來,而且灰度不變.而背景灰度絕大部分變得均勻,與目標(biāo)對(duì)比度顯著增大,取得了較好的效果. |

|
圖14 流水線法檢測(cè)到的目標(biāo)軌跡 六、結(jié) 論 |
















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論