其中,SLAM算法插件提供了SLAM領域流行的優秀算法,包括DSO,ORBSLAM,SVO和TheiaSFM等,這些插件可以直接集成到自己的代碼中,研究人員也可以基于這些插件進行進一步研究或者貢獻自己的插件。此外Rviz也被集成到了這一框架中進行可視化交互,讓用戶可以復用ros中的技能和知識。
2019-03-07 09:42:59 9332
9332 
本文提出了一個魯棒且快速的多模態語義 SLAM 框架,旨在解決復雜和動態環境中的 SLAM 問題。具體來說,將僅幾何聚類和視覺語義信息相結合,以減少由于小尺度對象、遮擋和運動模糊導致的分割誤差的影響。
2022-08-31 09:39:142569 相較于激光雷達SLAM系統,視覺SLAM系統具有不主動發出信號的優點。此外,視覺是對環境的稠密感知,可以利用視覺特征構建出更符合人類感知的環境地圖。
2022-12-21 16:18:094409 激光SLAM局部定位精度高但全局定位能力差且對環境特征不敏感,而視覺SLAM全局定位能力好但局部定位相對激光雷達較差,兩者融合可以提高SLAM系統的精度和魯棒性。
2023-10-23 11:01:142605 
LSD-SLAM 即 Large-Scale Direct SLAM,兼容單目相機和雙目相機。LSD-SLAM是一種基于光流跟蹤的直接法SLAM,但是實現了半稠密建圖,建圖規模大,可以在線實時運行。
2024-02-26 09:41:5016472 
LiDARInnovizPro、S3、SLAM on Chip、VLS-128。激光雷達是自動駕駛系統中一個非常重要的組件。在許多傳統供應商和新創公司看來,未來自動駕駛汽車在障礙探測和 SLAM(實時定位和地圖構建
2018-07-26 20:45:02
把LEGO組件加入到Labview中,通過Labview編程實現魔方復原的LEGO魔方機器人
2018-05-09 14:50:00
結合激光雷達或者攝像頭的方法,讓掃地機可以高效繪制室內地圖,智能分析和規劃掃地環境,成功讓自己步入了智能導航的陣列。除了掃地機之外,SLAM技術在其他服務機器人(例如商場導購機器人、銀行機器人
2018-12-06 10:25:32
目前,SLAM(即時定位與地圖構建)技術主要被運用于無人機、無人駕駛、機器人、AR、智能家居等領域,從各應用場景入手,促進消費升級。 機器人 激光+SLAM是目前機器人自主定位導航所
2020-12-01 14:26:37
研究生期間進行了基于2D激光雷達的SLAM的研究,當時主要做了二維激光雷達的數據處理。小弟不才,沒有入得了SLAM的坑,卻一直謎之向往,如今得以機會,決定正式邁出第一步,徹底進入SLAM的坑!心中
2021-08-30 06:13:31
什么是激光SLAM?激光SLAM技術在機器人運動控制系統中的應用是什么?
2021-07-30 06:37:25
SLAM(同步定位與地圖構建),是指運動物體根據傳感器的信息,一邊計算自身位置,一邊構建環境地圖的過程,解決機器人等在未知環境下運動時的定位與地圖構建問題。目前,SLAM 的主要應用于機器人、無人機、無人駕駛、AR、VR 等領域。其用途包括傳感器自身的定位,以及后續的路徑規劃、運動性能、場景理解。
2020-05-20 08:19:40
機器人定位導航中,目前主要涉及到激光SLAM與視覺SLAM,激光SLAM在理論、技術和產品落地上都較為成熟,因而成為現下最為主流的定位導航方式,在家用掃地機器人及商用送餐機器人等服務機器人中普遍采用了...
2021-07-05 06:41:57
什么是激光SLAM?視覺VSLAM又是什么?激光SLAM和視覺VSLAM有哪些不同之處?
2021-11-10 07:16:02
`一、照明用LED光源照亮未來 隨著市場的持續增長,LED制造業對于產能和成品率的要求變得越來越高。激光加工技術迅速成為LED制造業普遍的工具,甚者成為了高亮度LED晶圓加工的工業標準。 激光
2011-12-01 11:48:46
是激光雷達+SLAM的定位導航技術。 SLAM表示在不具備周圍環境信息的前提下,讓移動機器人在運動過程中根據自身攜帶的傳感器和對周圍環境的感知進行自身定位,同時增量式構建周圍環境地圖。SLAM可以提高
2018-11-09 15:59:01
AssetsLibrary框架詳細解析(一) —— 基本概覽
2020-04-29 15:12:25
Intelligent Vehicles Applications1. 介紹2. HOOFR-SLAM2.1 系統框架2.2 HOOFR特征提取2.3 映射線程2.3.1 特征匹配1. 介紹提出一種HOOFR-...
2021-12-21 06:35:49
Photos框架詳細解析(一) —— 基本概覽
2020-05-06 12:34:59
項目名稱:機器人激光與視覺融合的導航模塊試用計劃:申請理由本人在機器人SLAM領域有4年開發經驗,從最開始激光SLAM到視覺SLAM,在物流機器人行業不斷創新開發。SLAM技術將賦予為機器人和智能體
2019-07-03 10:50:01
SLAM是什么?VSLAM技術框架主要包括哪些?VSLAM技術擁有哪些核心技術優勢?
2021-07-09 07:29:11
)Kinect攝像頭 7)激光雷達2、已完成的部分,成果展示 根據Kinect攝像頭,小車能夠自主避障 利用Kinect攝像頭和slam算法,小車能在室內建...
2021-11-08 06:17:14
基于視覺的slam自動駕駛,這是我們測試的視頻《基于slam算法的智能機器人》調研分析報告項目背景分析機器人曾經是科幻電影中的形象,可目前已經漸漸走入我們的生活。機器人技術以包含機械、電子、自動控制
2021-08-09 09:37:34
如何實現基于RK3399開發板的cartographer激光SLAM建圖模塊的設計?
2022-03-07 07:05:11
將Simulink模型與Lego機器人結合使用可提供令人愉悅的基于模型的設計體驗支持LEGO MINDSTORMS NXT作為產品標準功能。即使沒有ECRobot NXT,您也可以玩樂高游戲
2021-12-20 07:15:51
的具體姿勢視覺傳感器:結合激光雷達,做SLAM建圖圖源:Science Robotics其中,相信大家對這款激光雷達很眼熟,就是思嵐科技的 RPLIDAR A1。A1的應用,可以用來幫助盲人探測周圍物體
2021-11-12 14:12:43
大家好,我想學習SLAM技術有資深的老師愿意教我嗎?qq:496397940
2018-11-09 13:42:27
,就是因為它的好壞,直接影響了SLAM構建地圖的精度。這個過程和我們玩拼圖游戲有點類似,就是在已經拼好的畫面中找到相似之處,確定新的一個拼圖該放在哪里。在SLAM過程中,需要將激光雷達當前采集的點云
2017-06-30 15:05:26
地圖上看誤差較大,SLAM 3.0也可靈活對已產生的地圖進行調整。 即: SLAM 3.0閉環修正 | 支持多傳感器融合 · 除激光雷達外,SLAM 3.0軟件技術同時支持深度視覺
2019-01-21 10:57:46
土木建筑工程中的激光技術解析
激光只是作為一種測量和計測工具被廣泛使用于土木建筑行業,使測量精度得到了大幅度提高。可是自從激光發明之日起,人們就一直
2010-05-08 17:00:521460 、無人駕駛、AR、VR 等領域。其用途包括傳感器自身的定位,以及后續的路徑規劃、運動性能、場景理解。 由于傳感器種類和安裝方式的不同,SLAM 的實現方式和難度會有一定的差異。按傳感器來分,SLAM 主要分為激光SLAM 和 VSLAM 兩大類。其中,激
2017-11-22 11:52:33 3
3 當我們談論SLAM時,最先問到的就是傳感器。SLAM的實現方式與難度和傳感器的形式與安裝方式密切相關。傳感器分為激光和視覺兩大類,視覺下面又分三小方向。下面就帶你認識這個龐大家族中每個成員的特性。
2018-01-09 13:09:0225812 高仙的SLAM2.0技術體系核心,是基于多傳感器融合+深度學習的架構,即語義SLAM。高仙SLAM2.0技術方案以語義分析、機器學習為基礎,結合云端實時信息處理以及專為多傳感器融合而開發的專業算法體系,真正實現了SLAM在建圖和導航兩個環節的完整應用。
2018-05-15 16:48:309730 SLAM要實現定位和制圖,第一步就是采集數據,而采集數據的關鍵就是傳感器,可以說沒有傳感器就沒有SLAM。而SLAM上的傳感器種類多樣,目前主流的我們可以將其分為兩大類:激光雷達和攝像頭。
2018-07-17 16:59:0234081 從圖中我們可以看出,掃地機器人能將其所經過的區域繪制成地圖,規劃清掃路徑,從而進行清掃。這種即時定位與地圖構建技術,就是我們所說的SLAM技術。要利用SLAM技術,首先需要機器人配置至少一個測距裝置,通過測距裝置獲取機器人周圍環境的信息。目前比較常見的測距裝置主要有激光測距、超聲波測距和圖像測距。
2018-09-10 11:07:2516241 
隨著傳感器種類和安裝方式的不同,SLAM的實現方式和難度會有很大差異。按傳感器來分,SLAM主要分為激光、視覺兩大類。其中,激光SLAM研究較早,理論和工程均比較成熟。視覺方案目前大部分實驗室研究
2019-05-12 10:31:136037 近年來SLAM系統與其他傳感器的融合成為了一大熱點。
2019-05-24 09:45:0613784 SLAM技術將賦予為機器人和智能體前所未有的行動能力。作為當前SLAM框架的主要類型,激光SLAM與視覺SLAM必將在相互競爭和融合中發展,必將帶來機器人技術和人工智能技術的真正革命,也將使得機器人從實驗室和展示廳中走出來,真正服務和解放人類。
2019-05-25 09:43:526219 ?近年來,SLAM技術取得了驚人的發展,領先一步的激光SLAM已成熟的應用于各大場景中,視覺SLAM雖在落地應用上不及激光SLAM,但也是目前研究的一大熱點,今天我們就來詳細聊聊視覺SLAM的那些
2019-08-09 17:31:201952 在自動駕駛技術的研發中,選擇以激光雷達還是攝像頭為主要傳感器是首要解決的問題,它們代表著兩套完全不同的系統——激光SLAM(Simultaneous Localization And Mapping)和視覺SLAM。
2019-10-12 15:08:243155 近年來,伴隨移動機器人在各行各業的廣泛應用,SLAM這個“名字”逐漸被更多的人所熟悉,但是SLAM具體是什么、SLAM有哪些應用領域、激光SLAM和視覺SLAM哪種方式更有優勢等等這些問題卻總是模糊不清。今天,小編就帶大家來詳細了解一下~
2020-01-18 17:43:003656 SLAM作為機器人自主定位導航的重要突破口正不斷引起業內重視,它是實現機器人自主行走的關鍵技術,可幫助機器人實現即時定位與地圖構建,在實際應用中,SLAM技術究竟又是如何實現的呢?一起來探個究竟
2021-10-14 14:35:092494 在業內,視覺SLAM與激光SLAM誰更勝一籌,誰將成為未來主流趨勢這一問題,成為大家關注的熱點,不同的人也有不同的看法及見解,以下將從成本、應用場景、地圖精度、易用性幾個方面來進行詳細闡述。
2020-08-28 14:53:3018830 
SLAM技術是一種計算機程序,用于構建座席周圍環境的虛擬地圖并更新其實時坐標。
2021-01-22 14:55:0022097 仙工智能近日推出基于SRC的激光SLAM搬運式自動叉車SFL-CBD20和基于SRC的激光SLAM小型堆高式自動叉車SFL-CDD14。 激光SLAM搬運式自動叉車SFL-CBD20 激光SLAM
2020-10-09 14:53:112481 當我們談論SLAM時,最先問到的就是傳感器。SLAM的實現方式與難度和傳感器的形式與安裝方式密切相關。傳感器分為激光和視覺兩大類,視覺下面又分三小方向。
2020-12-26 00:25:303276 SLAM這個“名字”逐漸被更多的人所熟悉,但是SLAM具體是什么、SLAM有哪些應用領域、激光SLAM和視覺SLAM哪種方式更有優勢等等這些問題卻總是模糊不清。
2020-12-26 09:39:323747 定位技術是機器人實現自主定位導航的最基本環節,是機器人在二維工作環境中相對于全局坐標的位置及其本身的姿態。目前SLAM (Simultaneous Localization and Mapping即時定位與地圖構建)是業內主流的定位技術,有激光SLAM和視覺SLAM之分。
2020-12-26 10:59:432447 激光slam導航的優點是技術成熟,能夠靈活規劃路徑,定位精度高,行駛路徑靈活多變,施工較為方便。
2021-03-21 11:33:003019 針對基于RBPF的激光SLAM算法在重采樣過程中出現的樣本貧化和激光測量模型不準確的問題,提出種優化的激光SLAM算法。為緩解重采樣過程中的樣本貧化問題,采用最小采樣方差重采樣方法改進原重采樣方法
2021-04-01 10:48:316 一般將使用單線雷達建構二維地圖的SLAM算法,稱為2D Lidar SLAM。大家熟知的2D Lidar SLAM算法有:gmapping, hector, karto, cartographer。通常數據和運動都限制在2D平面內且運動平面與激光掃描平面平行。
2021-04-18 10:18:1214335 
課題組已將該研究成果應用于智能駕駛即時定位與建圖(SLAM)任務中,提出了基于三維激光數據的層級式SLAM方法,實現了無GNSS環境下智能無人系統的高精度自主定位定姿,在智能駕駛國際著名公開數據集KITTI上排名全球第7(純激光SLAM算法中排名全球第4)。
2021-04-20 09:19:302744 
伴隨著人工智能的發展,各式各樣的服務機器人已在我們的日常生活及工作環境中出現。服務機器人能實現大面積普及,與相關核心技術的發展密不可分,激光SLAM在其中就扮演了重要角色。在實現服務機器人智能行走中
2021-05-10 09:40:42338 LEGO 10282是一款樂高和阿迪達斯推出的聯名款新產品,目前(7月1日起)已在LEGO Shop Online發售,售價79.99美元,折合人民幣約四百五十元。
2021-08-14 08:13:30910 無人平臺在大范圍環境中 實現自 主定位與導航的能力 需求日 益嚴苛, 其中 基于激光雷達的同步定位和繪圖 技術(SLAM) 是主流的研究方案。 在這項工作中, 本文系統概述了 3D 激光雷達SLAM
2022-03-21 16:07:576148 在實驗中,hdl_graph_slam和BLAM在所有數據集上的性能均不理想,因而下面不再討論。而SC-LeGo-LOAM的性能較之LeGo-LOAM也沒有明顯改善,因而下面也不再討論。
2022-08-03 10:46:021993 LINS是以濾波為主的IMU、激光雷達緊耦合的激光SLAM算法。該算法的主要創新點就是用以 IESKF(即迭代誤差卡爾曼)為框架,融合 IMU 與激光雷達。該算法于發表于 2020 年 ICRA
2022-10-09 14:57:124394 同時定位和映射(SLAM)是大多數自主系統所需的基本能力。在本文中,我們討論了基于自動駕駛汽車記錄的3D激光掃描的SLAM閉環問題。
2022-10-27 11:08:141716 一個建立在兩個基于直接法的緊耦合的完整的激光視覺慣導融合的slam框架;
2022-11-09 09:55:542417 SLAM本質上是一個狀態估計問題,根據傳感器做劃分,主要是激光、視覺兩大類。激光SLAM的研究在理論和工程上都比較成熟,現有的很多行業已經開始使用激光SLAM完成工業工作;而視覺SLAM
2022-12-02 15:00:283030 SLAM 是 Simultaneous Localization and Mapping 的縮寫,中文譯作“同時定位與地圖構建”。它是指搭載特定傳感器的主體,在沒有環境先驗信息的情況下,于運動過程中建立環境的模型,同時估計自己的運動。如果這里的傳感器主要為相機,那就稱為“視覺 SLAM”。
2022-12-05 10:16:312044 Lego-LOAM是基于軌跡位姿方法的回環檢測,使用KDtree尋找當前位姿的歷史最近位姿,之后把歷史位姿作為候選,用ICP算法修正位姿。
2023-01-11 09:12:592991 一般將使用單線雷達建構二維地圖的SLAM算法,稱為2D Lidar SLAM。大家熟知的2D Lidar SLAM算法有:gmapping, hector, karto, cartographer。通常數據和運動都限制在2D平面內且運動平面與激光掃描平面平行。
2023-03-27 11:06:563310 本篇介紹一個多智能體協同感知,協同動態調度決策的系統。系統包括基于3D點云的SLAM建圖(lego-loam),3維定位(hdl_localization),3D障礙物檢測(傳統聚類算法),部署了
2023-04-11 10:36:491 中國最大測繪地信展會,其域創新重新定義手持激光雷達、手持SLAM設備。
2023-04-27 12:26:502612 
相對于LOAM算法,LeGo-LAOM能夠進行地面優化,同時保證了輕量級,也加入了回環檢測模塊。本課程從必備的數學知識,到算法框架、源碼,再到最后的實踐,力求銜接清晰,通俗易懂,便于大家消化吸收。
2023-06-11 10:21:572511 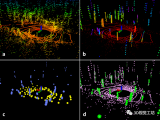
LeGO-LOAM全稱為:Lightweight and Groud-Optimized Lidar Odometry and Mapping on Variable Terrain,從標題可以看出 LeGO-LOAM 為應對可變地面進行了地面優化,同時保證了輕量級。
2023-06-11 15:02:132622 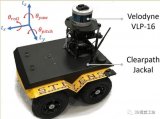
電子發燒友網站提供《Vernie的語音控制,基于LEGO的機器人.zip》資料免費下載
2023-06-16 15:26:570 深圳市不止技術有限公司是激光雷達行業頭部知名企業,團隊自2016年底就開始了多款激光雷達方案的研發,并創造了30多件發明專利,我們作為激光雷達行業5年多的資深老兵,對激光雷達有著深厚的技術積累
2022-02-08 14:56:414344 
用在SLAM上的傳感器主要可分為兩大類,一種是激光雷達,而另一種是攝像頭,為此,業內人士也將SLAM分為激光SLAM和視覺SLAM。激光SLAM比視覺SLAM起步早,在理論、技術和產品落地上都相對成熟。
2022-02-15 19:15:243281 
激光slam中,LOAM(Lidar Odometry and Mapping in Real-time)系列具有舉足輕重的地位。
2023-06-28 09:25:151522 
激光SLAM很多人都覺得很難,對于初學者更是不知道從哪里開始學起,怎樣才能更高效的學習,進入相關企業需要達到什么樣的要求,這也是很多初學者面臨的難題。如果掌握了3D激光SLAM的核心技術原理,編程
2023-06-29 15:28:551300 
對于學術研究而言,LeGo-LOAM是激光SLAM的經典框架,LeGo-LOAM源碼簡潔清晰,比LOAM算法的代碼可讀性要高很多。近幾年各頂會上的很多SLAM算法設計思想都潛移默化地受LeGo-LOAM的影響,對其的改進思路相較于LOAM也比較多樣化。
2023-07-03 10:47:081776 
電子發燒友網站提供《Lego Battle Alexa聲控游樂場.zip》資料免費下載
2023-07-11 17:04:070 接著 大模型部署框架 FastLLM 簡要解析 這篇文章首先梳理了一下FastLLM的調用鏈和關鍵的數據結構,然后解析了 FastLLM 的一些實現細節和CPU/GPU后端實現采用的優化技巧。
2023-07-27 10:48:274523 
近日,全國SLAM技術論壇于廈門大學舉辦。本次論壇聚焦SLAM和相關技術的前沿發展以及在應用領域的行業機會,旨在為SLAM技術和應用領域搭建全方位展示與交流平臺,推動國內SLAM技術的發展以及產學研
2023-08-01 09:37:231822 SLAM至今已歷經三十多年的研究,這里給出經典視覺SLAM框架,這個框架本身及其包含的算法已經基本定型,并且已經在許多視覺程序庫和機器人程序庫中提供。
2023-08-10 14:15:531789 
激光雷達是最古老,研究也最多的SLAM傳感器。它們提供機器人本體與周圍環境障礙物間的距離信息。常見的激光雷達,例如SICK、Velodyne還有我們國產的rplidar等,都可以拿來做SLAM。激光雷達能以很高精度測出機器人周圍障礙點的角度和距離,從而很方便地實現SLAM、避障等功能。
2023-08-16 10:31:083541 
在實驗中,hdl_graph_slam和BLAM在所有數據集上的性能均不理想,因而下面不再討論。而SC-LeGo-LOAM的性能較之LeGo-LOAM也沒有明顯改善,因而下面也不再討論。
2023-08-28 11:47:391434 
激光slam中,LOAM(Lidar Odometry and Mapping in Real-time)系列具有舉足輕重的地位。下面的表格是近年來LOAM系列算法的匯總。
2023-08-31 15:54:211422 
近年來,SLAM技術取得了驚人的發展,領先一步的激光SLAM已成熟的應用于各大場景中,視覺SLAM雖在落地應用上不及激光SLAM,但也是目前研究的一大熱點,今天我們就來詳細聊聊視覺SLAM的那些事兒。
2023-09-05 09:31:115453 
中強光智能自主研發的3D激光SLAM無人叉車KSRB1425由智能3D激光導航出發,結合視覺及多項感知融合技術,搭配先進的演算能力,實現智能化精準運動
2023-11-10 15:59:171607 什么是激光雷達3DSLAM?在了解這個概念之前,我們首先需要弄懂什么是“SLAM”。SLAM,英文是SimultaneousLocalizationandMapping,意思是即時定位與建圖。通俗
2023-11-25 08:23:572282 
跟蹤場景表示。這里也推薦工坊推出的新課程《徹底剖析室內、室外激光SLAM關鍵算法和實戰(cartographer+LOAM+LIO-SAM)》。
2023-12-26 16:38:332132 
定位準確性:與六種最新的里程計和SLAM方法進行比較,包括KISS-ICP、LeGO-LOAM、SC-LeGO-LOAM、MULLS、CT-ICP和GeoTransformer。在SemanticKITTI、KITTI-360和MulRan數據集上比較了DeepPointMap與這些方法的定位準確性。
2023-12-29 11:48:091926 
激光 SLAM 任務是搭載激光雷達的主體于運動中估計自身的位姿,同時建立周圍的環境地圖。而準確的定位需要精確的地圖,精確的地圖則來自于準確的定位,定位側重自身位姿估計,建圖側重外部環境重建。
2024-03-04 11:25:041756 
隨著深度學習技術的興起,計算機視覺的許多傳統領域都取得了突破性進展,例如目標的檢測、識別和分類等領域。近年來,研究人員開始在視覺SLAM算法中引入深度學習技術,使得深度學習SLAM系統獲得了迅速發展,并且比傳統算法展現出更高的精度和更強的環境適應性。
2024-04-23 17:18:362157 
AGV是制造物流重要設備,激光導航AGV高可靠靈活,SLAM技術關鍵,激光SLAM成熟且落地豐富,無需人工標志物,復合式激光導航兼顧可靠性與靈活性,激光導航結合內部傳感器提升導航質量。
2024-11-06 11:51:331222 
一、文章概述 1.1 摘 要 即時定位與地圖構建(simultaneous localization and mapping,SLAM)是自主移動機器人和自動駕駛的關鍵 技術之一,而激光雷達則是支撐
2024-11-12 10:30:253462 
同時定位與地圖構建(SLAM)是一項關鍵技術,允許移動機器人在部分或完全未知的環境中自主導航。它包括使用機載傳感器同時估計機器人狀態和構建傳感器檢測到的環境地圖。SLAM可以根據傳感器和地圖構建技術
2024-11-12 11:26:391752 
在SLAM中評估大規模的點云地圖仍頗具挑戰,主要原因在于缺乏統一、穩健且高效的評估框架。本文提出了MapEval,這是一個用于點云地圖綜合評估的開源框架。在模擬數據集和真實世界數據集上開展的大量實驗
2024-12-13 11:18:071479 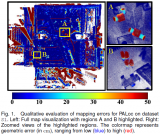
由于傳統視覺SLAM在動態場景中容易會出現嚴重的定位漂移,本文提出了一種新穎的基于場景-對象的可靠性評估框架,該框架通過當前幀質量指標以及相對于可靠參考幀的場景變化,全面評估SLAM的穩定性。
2025-08-19 14:17:57738 
在智能移動設備自主運行的賽道上,激光雷達3DSLAM技術正成為破局關鍵,但多數人對其認知仍停留在表層。要讀懂這一核心技術,不妨先回溯“SLAM”的本質——SLAM
2025-12-02 19:23:45323
 電子發燒友App
電子發燒友App








 工商網監
工商網監
評論