 一種適用于動態環境的自適應先驗場景-對象SLAM框架
一種適用于動態環境的自適應先驗場景-對象SLAM框架

由于傳統視覺SLAM在動態場景中容易會出現嚴重的定位漂移,本文提出了一種新穎的基于場景-對象的可靠性評估框架,該框架通過當前幀質量指標以及相對于可靠參考幀的場景變化,全面評估SLAM的穩定性。同時,針對現有系統在姿態估計不可靠時缺乏誤差校正機制的問題,我們采用了一種姿態精修策略,利用來自可靠幀的信息優化相機姿態估計,有效減輕動態干擾帶來的不利影響。在TUM RGB-D數據集上的大量實驗表明,我們的方法在具有挑戰性的動態場景中,顯著提高了定位精度和系統魯棒性。
? 文章:
Adaptive Prior Scene-Object SLAM for Dynamic Environments
? 作者:
Haolan Zhang, Thanh Nguyen Canh, Chenghao Li, Nak Young Chong
? 論文鏈接:
https://arxiv.org/abs/2507.21709
? 編譯:
INDEMIND
01 本文核心內容
目前,傳統視覺SLAM已發展出兩種方法:基于特征的方法,這類方法提取并匹配獨特的關鍵點;直接法,這類方法直接對像素強度進行處理,無需中間的特征提取步驟。盡管這些方法在靜態環境中效果顯著,但在動態場景中,由于存在移動物體和突然的視角變化,對它們往往有著極大挑戰,進而導致定位漂移。
對于動態場景導致的特征匹配錯誤和定位漂移。早期的解決方案側重于幾何方法,例如基于RANSAC的濾波、概率置信度評分以及基于相關性的圖分割。近年來出現了更多基于運動的方法,包括結合光流和粒子濾波的PFDSLAM,以及應用K均值聚類進行靜態概率估計的StaticFusion和Joint-VO-SF。這些方法在輕度動態場景中雖有效果,但難以處理大規模的動態變化。
為克服這些局限性,研究人員將深度學習技術融入其中。DS-SLAM利用SegNet進行語義濾波,DynaSLAM將Mask R-CNN與幾何驗證相結合。Blitz-SLAM采用兩階段方法,首先通過深度學習解析場景,然后進行幾何驗證。CFP-SLAM基于目標檢測和運動分類進行分層處理,SG-SLAM則在基于圖的框架中整合了語義理解與幾何約束。
在這些方法的基礎上,近期的研究探索了以目標為中心和以場景為中心的策略。研究人員提出了一種以目標為中心的方法,該方法基于不確定性、觀測質量和先驗信息評估質量,并實施雙重耦合——高質量目標有助于相機姿態估計,而低質量目標僅在后續進行跟蹤。
然而,以目標為中心的方法存在一些問題:固定的質量閾值無法適應場景變化;逐幀評估忽略了時間一致性;且缺乏誤差校正機制。又有研究人員提出了一種以場景為中心的方法,該方法利用先驗運動信息來增強時間一致性,但它難以應對突然的運動變化,由于依賴前一幀而存在跳過關鍵幀的風險,并且可能將低運動場景誤分類為靜態場景。
為克服以目標為中心和以場景為中心這兩種方法的局限性,我們基于ORB-SLAM3提出了一種適用于動態環境的自適應先驗場景-對象SLAM框架。
本文的貢獻可概括為:
一種場景-對象質量評估機制,該機制整合了基于幀的指標和動態變化評估,以實現可靠的場景評估。
一種自適應基準更新策略,該策略基于場景質量不斷優化參考標準。
一種直接融合方法,用于修正問題幀中的姿態估計誤差,從而增強魯棒性。
在TUM RGB-D數據集上進行了大量實驗驗證,證明該方法在定位精度和魯棒性方面有顯著提升。
02 方法架構
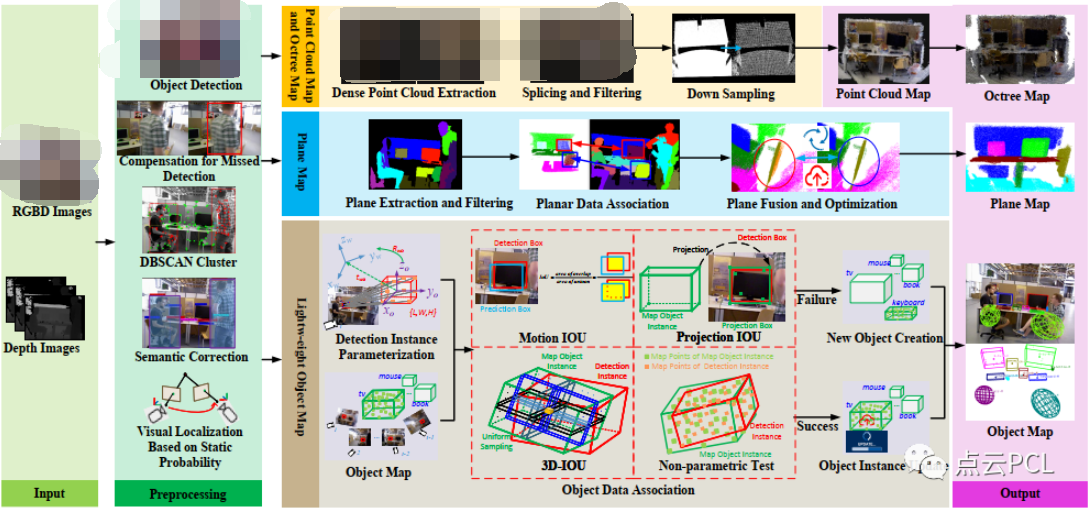
我們提出的流程(圖1)通過一個自適應框架處理RGB-D圖像,以在動態環境中實現穩健定位。該框架結合特征提取、語義分割和Lucas-Kanade光流來識別動態對象。我們的方法包含兩個關鍵組件:場景-對象質量評估機制和姿態精修策略。質量評估用于建立基準標準,根據基準對幀進行評估,并隨著環境條件的變化動態更新基準。當幀不可靠時,精修策略采用直接法來校正姿態估計,從而在動態場景中保持穩健性。

A. 場景-對象質量評估機制
1) 初始化:場景-對象質量評估機制以初始化階段為開端,旨在建立可靠的基準標準。我們的系統使用四個指標來量化幀質量:對象置信度得分(Sconf),用于衡量所有對象的檢測置信度;空間分布得分(Sspatial),用于評估對象在幀內的大小和位置;特征質量得分(Sfeature),用于評估特征響應強度和分布均勻性;以及深度質量得分(Sdepth),用于分析深度覆蓋范圍、一致性和平滑度。初始整體質量的計算公式為:

初始化階段通過分析初始幀中的對象置信度、空間分布、特征質量和深度信息,為場景評估建立基準。得分最高的幀將成為我們的參考基準,同時設置自適應初始化閾值,可隨環境條件的變化進行調整以保持相關性。
2) 場景決策:初始化之后,我們的系統會對每個輸入幀進行評估,以確定場景的可靠性。最終的場景質量得分結合了當前幀質量評估(Stotal)和相對于參考幀的變化評估(Schange):

B. 姿態精修策略
當某一幀根據我們的質量評估被歸類為問題幀時,我們會采用直接法來精修相機姿態估計。與依賴稀疏對應關系的基于特征的方法不同,我們的方法利用來自強度圖像和深度圖像的稠密信息,使其在具有挑戰性的場景中更具魯棒性。
03 實驗結果
我們在TUM RGB-D數據集上對所提方法進行了評估,該數據集廣泛用于動態環境下SLAM系統的基準測試。
A. 場景-對象質量評估機制的評估
在fr3/w/rpy序列的900幀中,我們的評估機制識別出30幀問題幀。如圖2所示,這些問題幀出現在相機朝向特征稀少的天花板(a)或快速滾轉旋轉時(b)。這些結果表明,我們的評估機制能夠有效識別傳統基于特征的方法容易失效的幀。所提出的質量指標成功捕捉到了幾何約束(如天花板視圖中的稀疏特征)和動態挑戰(如快速旋轉導致的運動模糊),驗證了我們方法的魯棒性。

B. 與最先進方法的比較
圖3展示了我們的系統與ORB-SLAM3在TUM RGB-D數據集上的結合效果。左圖呈現了當前幀以及正在運行的場景-對象質量評估,其中動態對象(如人)被檢測到(綠色邊界框)、分割(紅色掩碼),并使用Lucas-Kanade光流進行估計,以減輕其對姿態估計的影響。場景質量得分(0.36)和幀評估結果(GOOD SCENE)顯示在左上角,同時還有各項質量指標:置信度(Sconf)、空間分布(Sspatial)和特征質量(Sfeature),以白色文本顯示。右圖展示了ORB-SLAM3的稀疏建圖結果,包括三維點云和相機姿態。這一可視化結果凸顯了我們的框架如何通過改進場景質量評估和處理動態對象來增強ORB-SLAM3的性能,使其在復雜環境中能夠實現更穩健的跟蹤。

我們將所提系統與幾種基于ORB-SLAM2的動態環境下最先進的SLAM方法進行了對比,包括DynaSLAM、Blitz-SLAM和SG-SLAM。表I給出了平移和旋轉方面的絕對軌跡誤差(ATE)和相對姿態誤差(RPE)結果。如表I所示,我們的方法在ATE性能上具有競爭力,在幀間一致性方面表現優異,并且在大多數序列的平移和旋轉RPE上始終優于競爭方法。值得注意的是,在具有復雜相機運動的挑戰性場景中,我們的系統保持了較高的相對姿態精度,這表明我們的場景質量評估和姿態精修策略在動態環境中是有效的。
我們還將所提系統與基于ORB-SLAM3的DN-SLAM進行了評估,結果如表II所示。在動態序列上,我們的方法相比ORB-SLAM3將ATE降低了92%-97%,在絕對軌跡精度上與DN-SLAM相當,而在相對姿態性能上更優,特別是在具有挑戰性的fr3/w/rpy序列中(均方根誤差:0.025對0.065)。這些結果證明了我們的質量評估和姿態精修策略的有效性。圖4對比了ORB-SLAM3(上)和我們的方法(下)在四個TUM序列上的估計軌跡,包含三種線條類型:真實軌跡(黑線)、估計軌跡(藍線)和誤差(紅線)。我們的方法表現出更優的跟蹤精度,在所有序列中均降低了誤差。在fr3/w/xyz序列中,它與真實軌跡幾乎完美對齊;在動態條件下的fr3/w/halfsphere和fr3/w/rpy序列中,能夠準確跟蹤復雜運動。

我們的實驗證實,我們的場景質量評估和姿態精修策略提升了動態環境下的SLAM性能。在實現具有競爭力的絕對軌跡精度的同時,我們的方法在幀間一致性方面表現突出,這體現在大多數序列的RPE指標上均更優。
04 總結
在本文中,我們提出了一種適用于動態環境的自適應先驗場景-對象SLAM框架。我們的質量評估機制能夠有效識別問題幀,而當傳統方法失效時,我們的直接姿態精修策略可對跟蹤誤差進行校正。實驗結果表明,與最先進的方法相比,我們的方法有顯著改進,尤其是在保持穩定跟蹤方面。
在未來的工作中,我們計劃通過整合線特征和平面特征來增強系統性能,以改進質量評估,特別是在紋理稀疏的環境中。我們還旨在基于數據關聯開發一種針對優質幀和劣質幀的全局時間管理策略,實現對整個軌跡的全面優化,而不僅僅是幀間的精修。這些改進將進一步提升系統在復雜動態場景中的魯棒性,并支持更長期的一致性建圖。
-
SLAM
+關注
關注
24文章
459瀏覽量
33405 -
視覺
+關注
關注
1文章
181瀏覽量
24852
原文標題:超越現有方法!針對動態環境的自適應先驗場景-對象VSLAM,實現實時評估和誤差校正
文章出處:【微信號:gh_c87a2bc99401,微信公眾號:INDEMIND】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
一種適用于室內復雜環境的高精度、環境自適應性強的定位算法
一種適用于嵌入式系統的模塊動態加載技術
一種新的非白化濾波的自適應反卷積
一種自適應減載策略適用于高風點滲透下的電網

一種適用于動態場景的SLAM方法

關于推出適用于設備端推薦的自適應框架
一種適用于Ad+hoc網絡的DCF協議自適應功率控制機制

一種基于直接法的動態稠密SLAM方案


一種適用于動態環境的3DGS-SLAM系統





 工商網監
工商網監
評論