") 3D激光SLAM是用LOAM還是LeGo-LOAM?
3D激光SLAM是用LOAM還是LeGo-LOAM?

激光slam中,LOAM(Lidar Odometry and Mapping in Real-time)系列具有舉足輕重的地位。下面的表格是近年來LOAM系列算法的匯總。
| 算法名稱 | 發(fā)表名稱 | 作者 | 備注 |
|---|---|---|---|
| LOAM | 2014 | Ji Zhang | 基于激光雷達(dá)而搭建的在ROS平臺(tái)下的SLAM系統(tǒng) |
| A-LOAM | 實(shí)現(xiàn)了LOAM開源代碼,并做了部分優(yōu)化 | ||
| LeGO-LOAM | 2018 | Tixiao Shan | 與IMU是松耦合 |
| LlOM | 2019 | Haoyang Ye | 與IMU是緊耦合 |
| LIO-SAM | 2020 | Tixiao Shan | LeGO-LOAM升級(jí)版,與IMU緊耦合 |
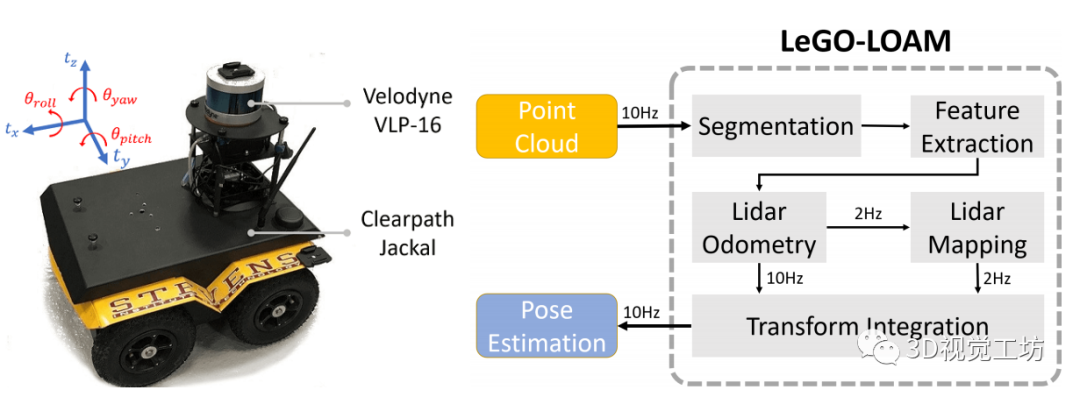
LeGo-Loam是基于ros系統(tǒng)框架的3D激光slam開源代碼。代碼簡潔,其中大量計(jì)算都是手動(dòng)推導(dǎo)出來,依賴庫相對(duì)較少,主要依賴gtsam進(jìn)行后端因子圖優(yōu)化。其中在前端里程計(jì)計(jì)算中,通過地面特征和線特征分開來計(jì)算機(jī)器人姿態(tài),減少計(jì)算量,提高前端計(jì)算效率。其系統(tǒng)框架如下圖:
相對(duì)于LOAM算法,LeGo-LAOM能夠進(jìn)行地面優(yōu)化,同時(shí)保證了輕量級(jí),也加入了回環(huán)檢測模塊。
相對(duì)于LOAM算法,LeGo-LAOM能夠進(jìn)行地面優(yōu)化,同時(shí)保證了輕量級(jí);也使用了Keyframe概念以及回環(huán)檢測位姿圖優(yōu)化的方式對(duì)后端進(jìn)行重構(gòu)。
對(duì)于工業(yè)領(lǐng)域而言,LeGo-LOAM有非常廣泛的應(yīng)用,尤其是工業(yè)機(jī)器人領(lǐng)域,LeGo-LOAM一直都是應(yīng)聘者必須掌握的框架。
對(duì)于學(xué)術(shù)研究而言,LeGo-LOAM是激光SLAM的經(jīng)典框架,LeGo-LOAM源碼簡潔清晰,比LOAM算法的代碼可讀性要高很多。近幾年各頂會(huì)上的很多SLAM算法設(shè)計(jì)思想都潛移默化地受LeGo-LOAM的影響,對(duì)其的改進(jìn)思路相較于LOAM也比較多樣化。
如何高效學(xué)習(xí)LeGo-LOAM?
學(xué)習(xí)SLAM主要需要攻克三大難關(guān):
扎實(shí)的數(shù)學(xué)基礎(chǔ)
對(duì)整個(gè)SLAM大框架及細(xì)節(jié)部分理解到一定深度
比較高度的編程能力
這三點(diǎn)都絕非易事,需要花很大的功夫,中間也有不少彎路要走。
審核編輯:劉清
-
工業(yè)機(jī)器人
+關(guān)注
關(guān)注
91文章
3542瀏覽量
98407 -
SLAM
+關(guān)注
關(guān)注
24文章
459瀏覽量
33394 -
3D激光
+關(guān)注
關(guān)注
0文章
32瀏覽量
7755
原文標(biāo)題:3D激光SLAM是用LOAM還是LeGo-LOAM?
文章出處:【微信號(hào):3D視覺工坊,微信公眾號(hào):3D視覺工坊】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
一徑科技NZ系列廣角全場景3D激光雷達(dá)全面賦能商用清潔機(jī)器人
禾賽科技2025年割草機(jī)器人3D激光雷達(dá)出貨量第一
常見3D打印材料介紹及應(yīng)用場景分析

iDS iToF Nion 3D相機(jī),開啟高性價(jià)比3D視覺新紀(jì)元!

什么是激光雷達(dá) 3D SLAM技術(shù)?

從3D傳感器到立體相機(jī),解鎖工業(yè)應(yīng)用新可能

半導(dǎo)體“HBM和3D Stacked Memory”技術(shù)的詳解
LMI Gocator 6300系列智能3D線激光輪廓傳感器介紹
全新輕量級(jí)ViSTA-SLAM系統(tǒng)介紹

洛微科技攜4D FMCW激光雷達(dá)與3D感知方案閃耀光博會(huì),引領(lǐng)行業(yè)新趨勢

解析尋跡智行3D SLAM無人叉車的"智慧"從何而來?(本文純干貨)
一種適用于動(dòng)態(tài)環(huán)境的3DGS-SLAM系統(tǒng)

3D閃存的制造工藝與挑戰(zhàn)



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論