倒車障礙檢測系統所采用的超聲波傳感器技術可以探測到附近的障礙物,為駕駛員提供倒車警告和輔助泊車功能,其原理是利用超聲波探測倒車路徑上或附近存在的任何障礙物,并及時發出警告。
2011-01-13 15:45:19 2014
2014 
該基于微控制器技術倒車障礙物撿測系統比單純用硬件電路系統要方便靈活得多,因為可用充分發揮軟件技術的優勢,既可根據運行與泊車環境需要增加功能又替代很多硬件電路,使倒車障礙物撿測系統更可靠準確。##發送器部分的控制。
2014-02-25 10:35:264079 針對激光傳感器在室外環境中檢測動態障礙物所遇到的數據處理存在延時、檢測結果準確率不高等問題,提出了一種基于3維激光傳感器Velodyne和四線激光傳感器Ibeo信息融合的動態障礙物檢測及表示方法
2016-11-20 11:26:111949 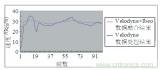
我們現在要做一個在高壓線上行走除冰的機構,需要檢測電線上的障礙并越障。檢測其中一種障礙時遇到了困難,求各位前輩們指點,感激不盡!!!這種障礙物是防震錘,我上傳了實物圖和尺寸圖。圖中D=h=20mm
2014-04-02 19:03:10
ANYmal機器人的實驗版本具有腿和腳,蘇黎世聯邦理工學院步行,有腿的機器人可能擅長于越過障礙物,但車輪在光滑地面上行駛仍然更有效率。這就是蘇黎世聯邦理工學院的工程師向其現有的ANYmal四足機器人
2021-08-30 08:02:03
我使用的是 VL53L1X,當 0 到 4 米范圍內有障礙物時代碼工作正常,如果 4 米以上的傳感器沒有障礙物給出隨機值,我們如何解決這個問題?
2022-12-08 08:52:03
我想做一個卷閘門下行過程中的障礙物探測器,就是在下行的過程中如果探測到門下面有障礙物的存在則停止下行,現在沒有思路。各位大俠給個思路,怎么樣來實現、需要具體哪些設備來完成這個功能。
2013-08-24 09:51:02
我想做一個卷閘門下行過程中的障礙物探測器,就是在下行的過程中如果探測到門下面有障礙物的存在則停止下行,現在沒有思路。各位大俠給個思路,怎么樣來實現、需要具體哪些設備來完成這個功能。
2013-08-24 09:55:41
本帖最后由 zeng10119 于 2017-3-21 12:01 編輯
有懂避障這方面的嗎?繞過障礙物的程序思路怎么寫?找了好多自動壁障車資料,都是無腦避障,要么是遇到障礙物左轉或右轉,要么是遇到障礙物180°轉彎。算法思路怎么搞?
2017-03-21 10:57:54
代碼的話如下所示,寫有沒有障礙物直走的功能,但是實際上沒有實現,求大神解決下新手的問題void avoidrun(void){ SR_2 = AVOID_RIGHT_IO; SL_2
2018-12-23 14:23:04
通過攝像頭對周圍環境信息的實時采集,如果當鏡頭前方出現障礙物時候,以一定的方式(聲音或振動之類的)反饋出來。主要考慮的是實現盲人室內導盲作用,不需要太過于考慮實際使用,只要能實現判定到障礙物,自動提醒就行啦。怎么判定前方出現障礙物,一直困擾著我。求大神指個思路,能有程序框圖就更好了
2017-03-14 07:58:55
我想要做一個道路障礙物檢測系統。就是在路面上安一個檢測器,一旦有障礙物擋住,且在路上停留一段時間,就發射信號報警,使二極管發光。現在我想請教一下是不是檢測用紅外線好一點,延時用單片機程序大概要怎么寫?電路什么的怎么連啊?求大神解答
2015-03-10 13:33:26
的問題是,不能按照我的指令完成避障。數碼管和按鍵和pwm功能基本都實現了,但是遇到障礙物時,小車倒退一小會接著就不走了,希望大神點撥一下,謝謝了。下面是主程序和pwm的程序。#include //包含
2020-04-19 22:50:58
目前,在全球范圍內,超過2.5億人視力受損。對于視力受損的群體來說,獨立外出是一項巨大挑戰。不僅需要識別障礙物,避開障礙物,還需要根據障礙物的位置信息做出自主尋路和導航判斷。當說到盲人導航的時候
2021-11-12 14:12:43
我正在設計一個也能避開各種障礙物(兩個數字紅外 (IR) 傳感器)的巡線機器人,但由于我是電子學初學者,所以我對我的原理圖有點困惑,這就是為什么我想知道是否我的原理圖是正確的,如果它能工作的話
2022-12-07 07:49:08
請問隔著一個很大的障礙物,怎么才能探測到障礙物后面的汽車呢(汽車沒有安裝特殊的設備,就一普通汽車)?
2013-11-22 15:12:08
百度網上和查閱教材了半天,只得到不外乎反復互相拷貝引用的兩種說法:1、“對于所設計的每一個電源層,一系列障礙物線將自動的創建在板框周圍,這些線在屏幕上不可編輯,建立的障礙物線是原來設置寬度的兩倍
2017-11-04 11:27:16
檢測障礙物有什么什么傳感器,用紅外反射還是超聲波測距,或者還有其他傳感器?
2023-11-08 06:33:49
電路設計要求:在一個數量為8*9的方格上安裝LED燈(LED為5w,共安裝72個),要求每個燈感應到障礙物可以常亮,障礙物移走則熄滅。(障礙物距離燈20-300mm)方格四個角同時遇到障礙物時電路通電,移走障礙物電路斷電。
2020-03-06 11:24:08
本帖最后由 gk320830 于 2015-3-8 14:20 編輯
急需用到2米內障礙物感應器,帶開關功能或者高手幫忙設計個輔助開關電路,24V電源供電,多謝
2013-03-07 21:58:40
用labview設計超級馬里奧游戲時如何加障礙物
2017-05-09 13:33:15
我現在需要使用紅外檢測一個比較小的障礙物,直徑兩厘米,黑色,金屬。很多紅外檢測模塊的賣家都不確定可以檢測的到,我現在有一個想法,不知道可不可行。我想檢測不到應該是因為這個障礙物對紅外的反射比較
2014-04-03 11:28:56
這種紅外線障礙物探測器不僅能用于機器人行進跟蹤控制,而且還可作為家庭和商店自動控制系統的重要部分。電路核心部分采用一只紅外線發射LED(IR1)和一只紅外線接收二極管(IR2)。
2021-04-28 07:03:20
想用單片機直接通過串口連接激光雷達,測障礙物,該激光雷達波特率230400,是arduino的極限115200的兩倍,所以要用STM32的芯片了。其數據手冊說的還是不清楚,固連接電腦的串口根據測得
2022-02-24 06:31:00
本帖最后由 gk320830 于 2015-3-8 20:36 編輯
設計完PCB后走線不能躲避障礙物時什么情況?已經設置了躲避障礙物還是不能躲避
2012-12-20 08:47:57
Infrared Proximity Sensor如何檢測前方是否有障礙物
2020-11-06 07:57:22
本帖最后由 7681196 于 2016-4-24 14:17 編輯
最近參加學校一個比賽,就是用51單片機實現飛機避開障礙物的游戲,游戲規則就是飛機通過移動來避開障礙物,碰到則游戲結束,有
2016-04-24 13:52:52
遇障礙物時語音提示前方危險,請注意。語音模塊是isd1820單片機51 求幫忙
2017-02-24 21:43:00
為什么有些東西,遇到障礙物會自動返回,是哪一種傳感器嗎?哪里有沒有這類的電路圖介紹下,非常感謝
2011-09-10 21:14:25
匯編語言程序設計案例1—動態顯示/障礙物檢測/障礙物方位檢測
10-1. LED數碼管顯示原理10-2. 案例分析1(2位學號顯示)10-3. 案例分析2(簡易按鍵搶答)10-4.
2009-03-23 12:15:35 38
38 此參考設計演示了如何將具有集成式 DSP 的 AWR1642 單芯片毫米波傳感器用作車門和后備箱的障礙物檢測傳感器,從而支持可在廣闊的視野 (FoV) 中準確檢測障礙物/物體的自動開門器和智能車門等
2009-08-12 16:58:2165 一種基于圖像分割和立體視覺相結合的障礙物檢測方法。通過分割提取出了障礙物的大致形體并濾去地面上的冗余信息,這樣就把立體視覺避障中匹配區域縮小到有用的障礙物區
2010-10-18 16:08:0828 障礙物檢測實驗
一、實驗目的“旋風”小車在運動過程中要成功避開障礙物必須在一定距離外就探測到障礙物。在小車上探測障礙物
2009-03-23 10:47:293548 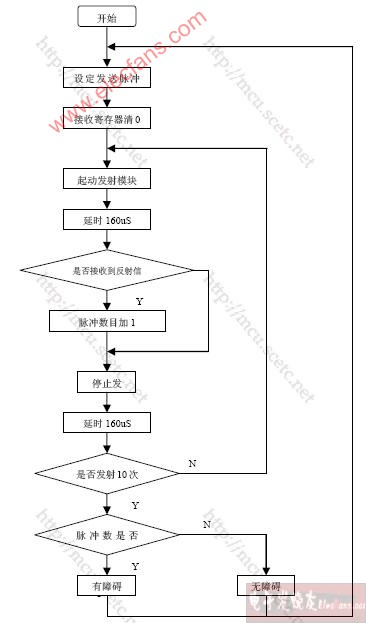
障礙物方位檢測實驗
一、實驗目的小車在運動中要成功避開障礙物,除了要檢測是否有障礙物外,還需要判斷障礙物的方位,以便小
2009-03-23 10:48:532268 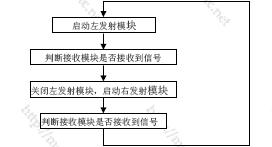
用單片機控制紅外編碼探測障礙物
介紹使用基于單片機控制紅外編碼探測障礙的方案及實現的方法,以解決使用紅外線自動感知障礙設備時出現的接收設
2009-03-29 15:13:352069 
本文主要討論的是機器人中最常用的紅外測距傳感器 GP2D12。 機器視覺中最接近人眼的莫過于攝像頭了,可圖像處理小車的大腦對付不了,至少 目前的大腦能力不夠,等進化后也許能夠
2011-04-28 14:48:05235 文中主要研究移動機器人在環境未知情況下的障礙物檢測問題,提出了一種基于Matlab和VC++混合編程的 障礙物檢測 系統軟件實現方法。該方法整合了MATLAB的數值計算功能,具有強大的圖
2011-09-05 13:45:532768 
論文以基于機器視覺的道路識別與障礙物檢測為研究對象采用動態圖像處理技術為行駛車輛提供環境狀態信息及車輛行駛狀態信息綜合利用車輛的當前行駛車道狀態(彎道或者直道)和距離
2012-04-25 14:58:5580 移動機器人的障礙物群檢測方法!資料來源網絡,如有侵權,敬請原諒!
2015-12-25 09:49:4217 一個黑客團隊采用多種方式,成功愚弄了特斯拉無人駕駛儀,讓它以為前方的障礙物并不存在。試想一下,如果這個障礙物是行人,或者是一輛高速行駛的大型車,結果會是怎樣?
2016-08-08 10:52:471297 海底復雜環境下機器人擺脫障礙物路徑優化方法研究_翟雁
2017-01-03 18:00:370 作為搭載 Autopilot (自動輔助駕駛)系統的代表車型之一, 特斯拉 無論是在業內人士眼中,還是在廣大消費者眼中,都可以說是標桿一般的存在。在每一次的產品發布會上,特斯拉CEO埃隆·馬斯克
2018-03-15 18:10:006865 麻生理工學院的研究人員表示他們已經開發出一種新的 成像 技術,可以讓 自動駕駛 汽車穿過大霧看到障礙物。 不管是傳統駕駛還是自動駕駛,大霧天都會讓行車變得危險。大多數自主導向系統使用的都是基于可見光
2018-03-28 02:21:008100 24 GHz雷達通過障礙物探測和測距提供安全性。
2018-06-04 03:47:004838 麻省理工學院最新發布的新研究視頻顯示,該學院研制的Cheetah 3獵豹機器人不需要直視而爬上樓梯臺階。視頻顯示,這個90磅重的機器人配備了新的算法,即使沒有攝像頭的幫助也可以躲避障礙物,機器人通過觸感來適應整個環境并完成任務。
2018-07-08 10:07:543586 在得到初始視差圖后,需要進一步判別障礙物的遠近及大小,所以這里引入 V-視差和 U-視差理論 [7] 。 V-視差圖是在初始視差圖的基礎上,累加視差圖像每一行上具有相同視差值 dv 的像素個數,以
2018-11-29 16:27:4812906 
這個階段主要作用是障礙物集群做XY平面下的凸包多邊形計算,最終得到這個多邊形的一些角點。第一部分相對比較簡單,沒什么難點,計算凸包是調用plc庫的ConvexHull組件(具體請參考pcl::ConvexHull)。
2018-12-06 16:23:306034 
近日據了解,首臺覆蓋5G的巴士正式進行測試階段,通過依靠5G網絡的傳輸讓巴士具備了高可靠性和低延時性,在車載激光雷達全方位探測、車載計算機人工智能算法等新技術支撐下,準確繞過障礙物,自動調整前進速度。
2019-01-27 10:49:121600 雖然我們已經看到很多設計用于向人們家中運送包裹的機器人,但大多數機器人都被房屋的前臺阻擋。 總部位于東京的Amoeba Energy正在開發一種履帶式機器人來提供解決方案。該機器人使用軟質泡沫輕松爬上樓梯或越過其他障礙物。
2019-05-29 16:11:173491 2018年,加州山景城發生了一起致命車禍,一輛特斯拉 Model X的自動駕駛系統未能識別障礙物,導致汽車以每小時71英里的速度一頭撞向公路護欄。隨后兩輛車撞上了這輛特斯拉,特斯拉的高壓電池被破壞,導致火災。車主在被送往附近醫院后,因傷勢過重死亡。
2020-02-27 14:56:12727 近日,來自瑞士蘇黎世大學的研究人員在最新一期的《科學· 機器人》(Science Robotics)雜志上發表了一項研究成果,他們設計出一種新方法,可以讓無人機在主動躲閃移動障礙物的情況下快速導航 。
2020-03-23 14:07:371002 激光雷達具有高精度電子地圖和定位、障礙物識別、可通行空間檢測、障礙物軌跡預測等功能。
2020-04-07 11:33:2021789 
為了實現非結構化道路檢測與障礙物的識別,提出了一種基于最小錯誤率貝葉斯決策與 Hough變換相結合的非結構化道路檢測與障礙物識別算法。算法首先將Otsu多閾值理論引入到最小錯誤率貝葉斯決策中并進
2020-07-06 17:45:588 近期,香港市場研究機構MobiusTrend發布了一份有關“特斯拉的AR云平臺和WIMI的無人駕駛全息全息AI視覺SDK”的研究報告。報告顯示,無人駕駛汽車可以實現自主控制并主動避開障礙物。盡管這聽起來令人難以置信,但這項技術現已取得了重大突破。
2020-09-08 15:07:011303 傳感器應用這款輪椅由日本電動輪椅企業Whill制造,采用防碰撞技術,裝有航站樓地圖和規避障礙物的傳感器。 日前,一款自主駕駛的輪椅能在航站樓穿梭自如,把行動不便的乘客準時送達登機口。最近,英國
2020-09-22 15:44:352386 以色列初創公司Corsight AI已推出了一種面部識別解決方案,該解決方案能夠快速,準確地識別人員,繞過障礙物以清除面部表情(例如面部遮蓋物和惡劣天氣)。
2020-11-21 09:33:102129 探測”(Barrier detection)系統,能夠利用激光雷達探測車輛路徑上的障礙物。 專利文件中寫道:“激光雷達數據可為自動駕駛車輛控制器所用,用于探測車輛環境中的物體,而且此類信息可用在動態環境中,為車輛提供導航以及運動規劃。”蘋果“障礙物探測
2020-12-10 16:09:042448 國外DroneDJ網站12月17日報道,來自康奈爾大學(Cornell University )和arXiv實驗室的研究人員展示了他們最新的無人機項目,其可使蜂群無人機在編隊飛行時動態避開障礙物
2020-12-21 17:29:102941 避免障礙物(即墻壁或前方的物體)的Arduino控制汽車。 ? ? ? ? 責任編輯:xj 原文標題:基于Arduino的避障車 文章出處:【微信公眾號:電路設計技能】歡迎添加關注!文章轉載請注明出處。 ?
2020-12-25 14:55:462022 基于fpga的3D打印清潔機器人。該機器人具有多個用于檢測障礙物的傳感器和一個用于清潔地板的吸塵器。此外,該機器人還包含一種導航算法,使其能夠盡可能高效地駛離房間并相應地對障礙物做出反應。
2021-04-28 15:09:292739 
障礙物對列車的正常運營構成了極大的安全隱患,鋼軌軌識別是實現障礙物檢測的關鍵步驟。鋼軌識別算法需要能夠快速有效地檢測列車前方鋼軌的位置,同時不能占用過多的計算資源,影響障礙物檢測程序的運行速度。為
2021-06-16 15:03:495 攝像頭獲取的圖像包括行人、其他車輛、動物或障礙物,這不僅對特斯拉車輛駕駛員的安全很重要,對其他人也很重要。
2021-06-26 14:04:4710758 
ESP8266 SOC智能硬件典型應用方案-紅外障礙物檢測應用-布爾值上報
2022-10-08 10:11:160 電子發燒友網站提供《Arduino障礙物避免機器人汽車.zip》資料免費下載
2022-10-31 09:30:560 電子發燒友網站提供《使用IR模塊的障礙物檢測器.zip》資料免費下載
2022-11-14 11:31:220 電子發燒友網站提供《Robobug六足動物行走和跟隨障礙物開源硬件.zip》資料免費下載
2022-12-06 14:36:200 電子發燒友網站提供《障礙物檢測和顏色跟隨機器人的創建.zip》資料免費下載
2022-12-23 15:22:200 電子發燒友網站提供《創建一個能夠警告接近障礙物的系統.zip》資料免費下載
2022-12-29 11:28:150 降雨并短時強降雨,列車高速運行中撞上突發溜坍侵入線路的泥石流,導致7號、8號車發生脫軌。障礙物侵限造成的事故,貴州并非第一例。據界面新聞報道,2020年3月,受連日
2022-08-04 09:33:042480 
電子發燒友網站提供《如何讓Arduino使用雷達避開障礙物.zip》資料免費下載
2023-06-26 14:58:361 基于點云的3D障礙物檢測 主要有以下步驟: 點云數據的處理 基于點云的障礙物分割 障礙物邊框構建 點云到圖像平面的投影 點云數據的處理 KITTI數據集 KITTI數據集有四個相機,主要使用第三個
2023-06-26 10:22:381948 
編輯注:NVIDIA 自動駕駛實驗室系列視頻,將以工程技術為重點的視角關注實現自動駕駛汽車的各個挑戰以及 NVIDIA DRIVE AV 軟件團隊如何應對這些問題。 自動泊車輔助系統在感知障礙物
2023-07-13 21:15:011508 
今天給大家分享的是:簡單的障礙物識別傳感器電路。附加元器件清單+原理圖 一、簡單的障礙物識別傳感器電路 該電路是基于 IR LED 、 光電二極管 和 運算放大器LM358P 設計的 簡單障礙物識別
2023-09-06 19:40:011980 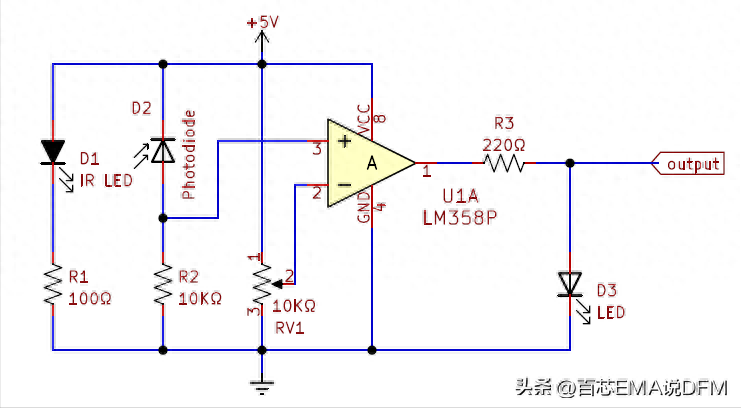
電子發燒友網站提供《TIDEP-01024-使用 76GHz至81GHz封裝天線 (AoP) 毫米波傳感器的障礙物檢測 PCB layout 設計.pdf》資料免費下載
2024-05-19 16:00:000 此項技術創新性在于,通過利用安裝在移動機器人前方的TOF攝像頭,可以獲取探測視角范圍內的目標障礙物的深度圖像,并據此計算出目標障礙物的深度信息及尺寸大小。
2024-04-12 10:19:14942 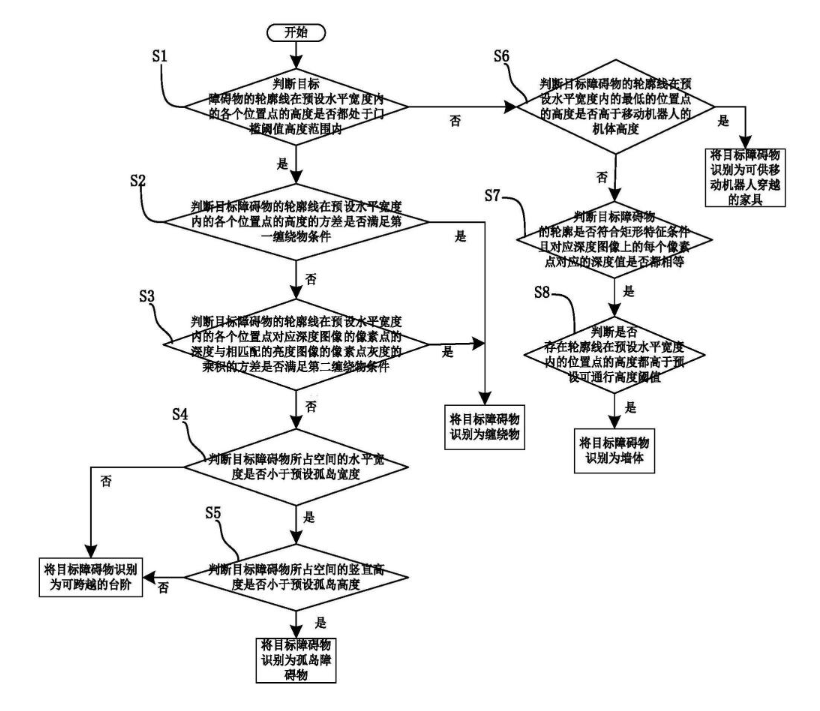
據悉,特斯拉近期推出新版軟件升級,宣稱改善了前備箱的物體檢測性能。更新文檔指出:“電動前備箱在關閉過程中可更準確識別障礙物。”然而,部分車主反映,升級后防夾功能仍存在穩定性問題。
2024-05-06 17:00:041001 自動駕駛汽車識別障礙物是一個復雜而關鍵的過程,它依賴于多種傳感器和技術的協同工作。這些傳感器主要包括激光雷達(LiDAR)、雷達、攝像頭以及超聲波雷達等,它們各自具有不同的工作原理和優勢,共同為自動駕駛汽車提供全面的環境感知能力。以下是對自動駕駛汽車如何識別障礙物的詳細闡述。
2024-07-23 16:40:243754 的特點,這使得它非常適合用于探測和測距。 雷達探測障礙物的工作原理 雷達(包括超聲波雷達)通過發射裝置向外發射超聲波。 這些超聲波遇到障礙物后會被反射回來。 雷達的接收器接收到反射回來的超聲波后,根據超聲波往返的時間和速度(聲速),
2024-08-16 10:26:074077 個重要功能就是探測障礙物。 一、超聲波探測障礙物的原理 超聲波的產生 超聲波的產生主要有兩種方式:機械式和電子式。機械式是通過機械振動產生超聲波,如壓電陶瓷、磁致伸縮等。電子式是通過電子信號產生超聲波,如超聲波換能
2024-08-16 10:27:512755 電子發燒友網站提供《割草機器人利用超聲波感應自動檢測地形類型和障礙物.pdf》資料免費下載
2024-09-07 09:17:101 富唯智能移動機器人通過激光雷達導航算法,實現自動路徑規劃,無需軌道、磁條等。當路徑中有障礙物時,會重新規劃路徑避開障礙物。
2024-11-16 15:54:41955 
隨著國家智能制造升級政策的深入實施,起重機產業正加速向數字化、智能化轉型,涵蓋了遠程監控、自動化操作、故障預測及障礙物監控等關鍵功能。
2025-06-25 11:13:42930 城市道路瞬息萬變,每一秒都可能面臨新的挑戰。施工占道、前車急停、三角警示牌突現等復雜場景時刻考驗著駕駛員與車輛的應對能力。Momenta飛輪大模型驅動的輔助駕駛系統,能夠精準避讓障礙物,讓每一次通行
2025-07-09 09:22:39894 [首發于智駕最前沿微信公眾號]最近有一位小伙伴留言,想讓我聊聊自動駕駛汽車對于石頭這樣的小障礙物,是使用什么視覺任務檢測的。在直接回答“如何檢測”之前,其實要思考一個更根本的問題,對于一個像石頭這樣
2025-12-24 16:53:00908 
 電子發燒友App
電子發燒友App








 工商網監
工商網監
評論