 激光雷達的標定_激光雷達的功能
激光雷達的標定_激光雷達的功能

激光雷達的標定
1、旋轉
三個角度,旋轉角、俯仰角、橫擺角
可以涉及到投影,投影是平行投影。
這里傾角會有不同,但是投影的形狀是一定的。三角形投影下來,還是三角形。
人為的傾斜雷達,他們測量得到的距離是相對于雷達坐標系的,而并不是相對于車體坐標系的。
坐標系:笛卡爾坐標系

橫擺角矯正:xy平面
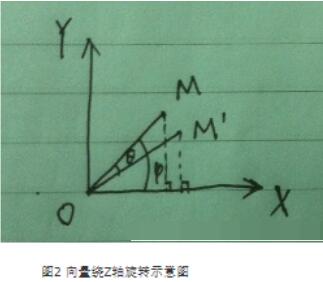
xx=xcosa+ysina
yy=ycosa–xsina
俯仰角矯正:yz平面
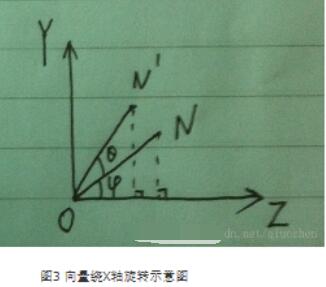
yy=ycos+zsina
zz=zcosa–ysina
旋轉角矯正:xz平面
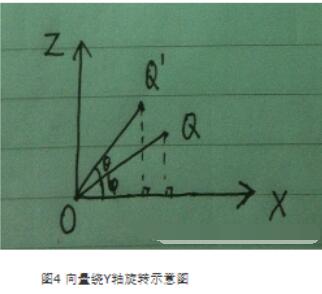
xx=xcosa-zsina
zz=zcosa+xsina
合起來就是一個四維的旋轉矩陣。
2、平移
xx=xx+w;
yy=yy+h;
zz=zz+z;
通過以上6個參數:三個角,三個偏移,就可以解決多線激光雷達標定問題。
激光雷達的功能
激光雷達具有高精度電子地圖和定位、障礙物識別、可通行空間檢測、障礙物軌跡預測等功能。
(1)高精度電子地圖和定位利用多線束激光雷達的點云信息與車載組合慣導采集的信息,進行高精度電子地圖制作。無人駕駛汽車利用激光點云信息與高精度電子地圖匹配,以此實現高精度定位。
(2)障礙物識別利用高精度電子地圖限定感興趣區域(ROI)后,根據障礙物特征和識別算法,進行障礙物檢測與識別。
(3)可通行空間檢測利用高精度電子地圖限定ROI后,可以對ROI內部(比如可行駛道路和交叉口)點云的高度及連續性信息判斷點云處是否可通行。
(4)障礙物軌跡預測根據激光雷達的感知數據與障礙物所在車道的拓撲關系(道路連接關系)進行障礙物的軌跡預測,以此作為無人駕駛汽車規劃(避障、換道、超車等)的判斷依據。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
激光雷達
+關注
關注
982文章
4522瀏覽量
196949
發布評論請先 登錄
相關推薦
熱點推薦
固態激光雷達參數以及避障視頻
本帖最后由 jf_63660781 于 2026-3-27 14:23 編輯
1 產品概述
G90A-60傳感器是一款線陣固態激光雷達。本產品基于三角測距原理,并配以相關光學、電學
發表于 03-27 14:14
車載激光雷達溫度監控:NTC芯片的核心應用
車載激光雷達對溫度的敏感性,決定了金電極NTC芯片在其內部的重要性。在NTC幫助下,激光雷達減少了波長漂移的情況出現,更好地保持其測距精度。且EXSENSE金電極NTC芯片獨特的溫度感知能力及可靠的電氣特性,亦滿足了車載激光雷達
自動駕駛激光雷達會傷害人體嗎?
[首發于智駕最前沿微信公眾號]隨著自動駕駛技術的普及,激光雷達的使用也越來越多。現在我們很容易就看到搭載激光雷達的車輛在路上行駛。很多人聽到“激光”后總會有一種擔憂,害怕自動駕駛汽車上的激光雷

禾賽科技位列全球激光雷達行業專利第一
近日,Yole Group 旗下全球知名知識產權戰略咨詢機構 KnowMade 發布《汽車激光雷達專利全景分析 -2025 版》報告,(LiDAR for Automotive Patent

如何解決激光雷達點云中“鬼影”和“膨脹”問題?
[首發于智駕最前沿微信公眾號]之前在聊激光雷達點云“鬼影”和“膨脹”的文章中( 相關閱讀: 激光雷達點云中“鬼影”和“膨脹”是什么原因導致的?),很多小伙伴都提到一個問題,那就是激光雷達點云中

禾賽科技與理想汽車續簽激光雷達合作
今日,全球激光雷達領先企業禾賽科技(NASDAQ: HSAI;HKEX: 2525)正式宣布獲得理想汽車全新一代輔助駕駛平臺全系車型激光雷達定點,包括 L 系列、 i 系列和 MEGA。禾賽科技也將繼續作為理想汽車的獨家激光雷達
激光雷達為什么會出現串擾的問題?
[首發于智駕最前沿微信公眾號]自動駕駛技術自提出以來,激光雷達就是非常重要的感知硬件,即便到現如今很多技術方案開始傾向于純視覺時,依舊有很多的車企堅定地選擇激光雷達。激光雷達常見的工作方式有脈沖型

華為,激光雷達第一! 車載激光雷達市場的“隱形冠軍”
據國內資訊機構蓋世汽車統計,在汽車市場,2025 年 1-8 月激光雷達供應商裝機量排行榜顯示,中國激光雷達市場呈現顯著的頭部集中效應,華為、禾賽科技、速騰聚創占據行業TOP 3,三家市場份額總和


FMCW激光雷達,加速落地工業場景
電子發燒友網綜合報道 FMCW激光雷達雖然在車載領域還未實現量產應用,但實際上在工業等領域,比如單點測距場景中已經實現落地。近期激光雷達廠商摩爾芯光正式發布全球首款FMCW球形激光雷達。這款革命性
SPAD席卷車載激光雷達市場
電子發燒友網報道(文/梁浩斌)上周我們報道了一款新推出的激光雷達ASIC方案,值得關注的是該方案中與ASIC搭配的傳感器均選擇了SiPM。當然從成本的角度來看,作為第三方的激光雷達ASIC方案
超酷的樹莓派激光雷達掃描儀!
摘要這款DIY的PiLiDAR掃描儀項目利用樹莓派進行激光雷達測繪。激光雷達通過發射激光來掃描周圍環境,從而創建三維模型。該項目需要樹莓派4、攝像頭、電機以及激光雷達套件。你是否了解過

激光雷達(LiDAR)技術方案與工作原理全解析
在自動駕駛、智慧城市、機器人導航等眾多前沿科技領域,激光雷達(LiDAR,Light Detection and Ranging)正扮演著愈發關鍵的角色。它憑借高精度、高分辨率的探測能力,為各類智能

自動駕駛激光雷達:原理、類型與應用梳理
? 1.什么是激光雷達 激光雷達LiDAR的全稱為Light Detection and Ranging 激光探測和測距。 激光雷達的工作原理:對紅外光束Light Pluses發射、

激光雷達調研紀要
本文為激光雷達相關調研問答的整理,部分內容來自語音轉錄且未經證實,請辯證查看。 1、車企激光雷達配置趨勢 眾多車企計劃跟進:比亞迪旗艦車型、領跑B系列等已在10 - 15萬級別車型標配激光雷達,吉利



 工商網監
工商網監
評論