 電子發(fā)燒友App
電子發(fā)燒友App



步進(jìn)電機(jī)作為開環(huán)運(yùn)動控制的核心執(zhí)行元件,其控制精度、運(yùn)行穩(wěn)定性、負(fù)載能力與噪聲表現(xiàn),完全依賴驅(qū)動板的性能支撐。驅(qū)動板是步進(jìn)電機(jī)控制方案中的 “功率中樞與控制橋梁”,承接控制器(MCU/PLC)的弱電指令,通過能量轉(zhuǎn)換、信號放大、閉環(huán)調(diào)節(jié)與安全保護(hù),實現(xiàn)對步進(jìn)電機(jī)的精準(zhǔn)驅(qū)動。本文從步進(jìn)電機(jī)控制的底層邏輯出發(fā),系統(tǒng)拆解驅(qū)動板在指令解析、功率驅(qū)動、運(yùn)行優(yōu)化、安全防護(hù)四大維度的核心作用,結(jié)合典型硬件架構(gòu)與工程案例,揭示驅(qū)動板如何突破步進(jìn)電機(jī) “低速振動、高速失步、負(fù)載受限” 的技術(shù)瓶頸。
一、步進(jìn)電機(jī)控制的核心痛點與驅(qū)動板的定位
步進(jìn)電機(jī)的本質(zhì)是 “電脈沖 - 機(jī)械角位移” 的轉(zhuǎn)換器件,其原生特性存在三大核心痛點:
弱電指令無法直接驅(qū)動:控制器輸出的脈沖 / 方向信號(5V/3.3V,mA 級電流)無法驅(qū)動電機(jī)繞組(需數(shù)十 V 電壓、A 級電流);
運(yùn)行穩(wěn)定性差:原生整步驅(qū)動轉(zhuǎn)矩波動大,低速振動、高速失步問題突出;
安全邊界模糊:無過流、過溫保護(hù),易因負(fù)載突變或參數(shù)配置不當(dāng)導(dǎo)致電機(jī)燒毀。
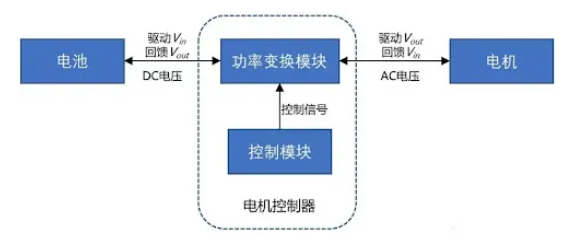
步進(jìn)電機(jī)驅(qū)動板的核心定位是“弱電指令→強(qiáng)電驅(qū)動” 的轉(zhuǎn)換器與“電機(jī)運(yùn)行狀態(tài)→安全保障” 的調(diào)節(jié)器,其作用貫穿步進(jìn)電機(jī)控制的全流程,是連接控制層與執(zhí)行層的關(guān)鍵樞紐。
二、驅(qū)動板的四大核心作用解析
2.1 指令解析與信號轉(zhuǎn)換:控制邏輯的 “翻譯官”
驅(qū)動板首先完成對控制器指令的解析與標(biāo)準(zhǔn)化轉(zhuǎn)換,確保電機(jī)按預(yù)期運(yùn)動:
指令接收:接收控制器輸出的三大核心信號 —— 脈沖信號(PUL,控制步距角)、方向信號(DIR,控制旋轉(zhuǎn)方向)、使能信號(ENA,控制電機(jī)啟停),部分高端驅(qū)動板支持 RS485/CAN 總線指令(位置、速度、加速度參數(shù));
信號整形:通過施密特觸發(fā)器(如 74HC14)或 RC 濾波電路,濾除指令信號中的高頻噪聲與毛刺,避免誤觸發(fā);
邏輯轉(zhuǎn)換:將數(shù)字指令轉(zhuǎn)換為電機(jī)繞組的驅(qū)動邏輯(如兩相步進(jìn)電機(jī)的 A/B 相通電時序、微步細(xì)分的電流分配比例),為功率驅(qū)動提供精準(zhǔn)控制信號。
關(guān)鍵價值
兼容不同控制器輸出電平(3.3V/5V),無需額外電平轉(zhuǎn)換電路;
隔離控制層與功率層,避免電機(jī)側(cè)電磁干擾影響控制器穩(wěn)定性。
2.2 功率放大與能量轉(zhuǎn)換:電機(jī)運(yùn)行的 “動力源”
這是驅(qū)動板最核心的硬件功能,實現(xiàn)從低壓弱電到高壓強(qiáng)電的能量轉(zhuǎn)換,為電機(jī)繞組提供足夠的驅(qū)動功率:
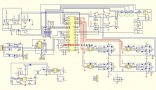
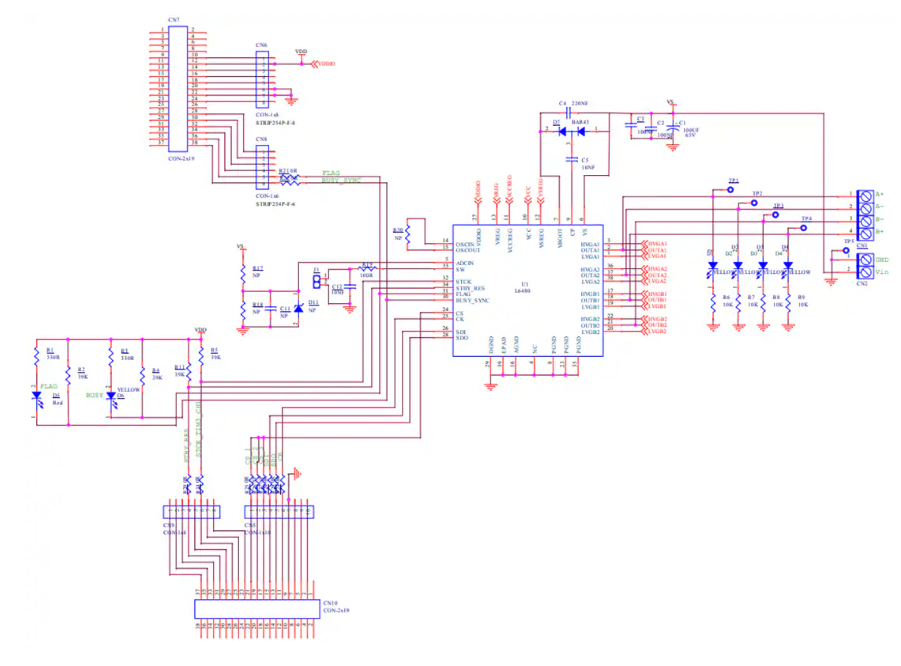
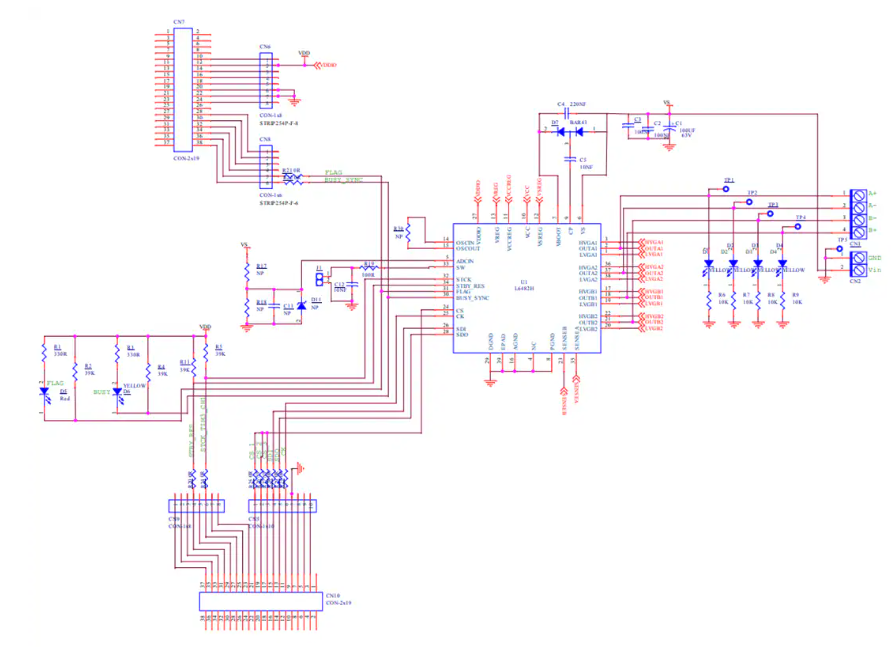
拓?fù)浣Y(jié)構(gòu):主流采用兩相 H 橋(針對兩相四線 / 六線步進(jìn)電機(jī))或三相全橋(針對三相步進(jìn)電機(jī)),由 4~6 顆 MOSFET 或 IGBT 組成功率開關(guān)網(wǎng)絡(luò);
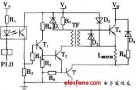
電壓放大:將控制器的 5V/3.3V 指令信號,通過柵極驅(qū)動芯片(如 IR2104、TC4420)放大為足以驅(qū)動 MOSFET/IGBT 的柵極電壓(10~15V),控制功率器件的通斷;
電流驅(qū)動:將輸入電源(12V/24V/36V)的能量轉(zhuǎn)換為電機(jī)繞組所需的大電流(0.5~5A),產(chǎn)生旋轉(zhuǎn)磁場驅(qū)動轉(zhuǎn)子轉(zhuǎn)動。
關(guān)鍵技術(shù)細(xì)節(jié)
功率器件選型:選用低導(dǎo)通電阻(Rds (on)≤50mΩ)、高耐壓(≥2 倍母線電壓)的 MOSFET,降低導(dǎo)通損耗;
柵極驅(qū)動優(yōu)化:柵極串聯(lián) 10~22Ω 電阻抑制開關(guān)噪聲,并聯(lián)加速電容提升開關(guān)速度,減少開關(guān)損耗;
母線儲能:并聯(lián) 100μF 電解電容(濾除低頻紋波)+0.1μF 陶瓷電容(抑制高頻噪聲),確保功率輸出穩(wěn)定。
關(guān)鍵價值
突破控制器的功率限制,使步進(jìn)電機(jī)能夠驅(qū)動數(shù)倍于自身重量的負(fù)載;
實現(xiàn)電機(jī)繞組電流的精準(zhǔn)控制,為后續(xù)運(yùn)行優(yōu)化奠定基礎(chǔ)。
2.3 運(yùn)行優(yōu)化與性能提升:電機(jī)特性的 “調(diào)節(jié)器”
驅(qū)動板通過硬件電路與控制算法,解決步進(jìn)電機(jī)原生缺陷,顯著提升運(yùn)行性能:
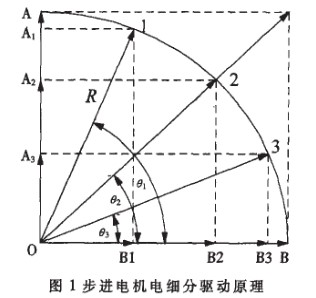
2.3.1 微步細(xì)分控制:抑制振動與噪聲
核心原理:將電機(jī)的一個整步(如 1.8°)細(xì)分為多個微步(1/2、1/4、1/8、1/16、1/32 甚至 1/256 步),通過精準(zhǔn)分配各相繞組電流,使轉(zhuǎn)子平滑過渡,減少轉(zhuǎn)矩波動;
硬件實現(xiàn):通過專用驅(qū)動芯片(如 TMC2209、DRV8825)內(nèi)置的 DAC 或電流細(xì)分電路,生成階梯式電流波形;
效果:低速振動降低 40% 以上,噪聲降低 20~30dB,定位精度提升至微步級別(如 1/32 細(xì)分時,步距角僅 0.05625°)。
2.3.2 恒流斬波控制:降低發(fā)熱與能耗
核心原理:電機(jī)繞組為感性負(fù)載,電流上升緩慢,恒流斬波通過檢測繞組電流,當(dāng)電流達(dá)到設(shè)定值時關(guān)斷功率器件,電流下降至閾值時重新導(dǎo)通,維持繞組電流恒定;
硬件實現(xiàn):通過采樣電阻(0.1~0.2Ω 合金電阻)檢測電流,經(jīng)運(yùn)放放大后與基準(zhǔn)電壓比較,控制 PWM 輸出;
效果:避免電流過大導(dǎo)致電機(jī)過熱,能耗降低 30% 以上,同時保證電機(jī)輸出轉(zhuǎn)矩穩(wěn)定。
2.3.3 衰減模式調(diào)節(jié):平衡低速平穩(wěn)性與高速性能
快衰減:電流下降速度快,適合高速運(yùn)行,減少換相時的轉(zhuǎn)矩?fù)p失,但噪聲較大;
慢衰減:電流下降速度慢,低速運(yùn)行更平穩(wěn),振動小,但高速性能略差;
混合衰減:驅(qū)動板自動切換衰減模式,根據(jù)轉(zhuǎn)速動態(tài)調(diào)整,兼顧低速平穩(wěn)與高速響應(yīng)(如 TMC 系列芯片的 SpreadCycle 技術(shù))。
2.3.4 閉環(huán)反饋優(yōu)化(高端方案)
核心原理:部分驅(qū)動板集成霍爾傳感器或磁編碼器(如納芯微 MT68xx),實時檢測電機(jī)實際轉(zhuǎn)速與位置,與指令值對比,動態(tài)調(diào)整電流與微步參數(shù),避免失步;
效果:開環(huán)控制下失步率>5%,閉環(huán)控制后失步率<0.1%,負(fù)載適應(yīng)能力提升 2~3 倍。
2.4 安全防護(hù)與系統(tǒng)保障:設(shè)備運(yùn)行的 “安全屏障”
驅(qū)動板通過多重硬件保護(hù)機(jī)制,避免電機(jī)、驅(qū)動板及控制器因故障損壞,是系統(tǒng)可靠性的核心保障:
2.4.1 過流保護(hù)
檢測方式:采樣電阻實時監(jiān)測繞組電流,當(dāng)電流超過設(shè)定閾值(通常為額定電流的 1.5~2 倍)時,觸發(fā)保護(hù);
保護(hù)動作:立即關(guān)斷功率器件,切斷電機(jī)供電,同時輸出故障信號至控制器;
應(yīng)用場景:負(fù)載堵轉(zhuǎn)、繞組短路、參數(shù)配置錯誤等導(dǎo)致的電流驟增。
2.4.2 過溫保護(hù)
檢測方式:在 MOSFET 散熱片或驅(qū)動板核心區(qū)域貼裝 NTC 熱敏電阻,實時監(jiān)測溫度;
保護(hù)閾值:通常設(shè)定為 70~85℃,溫度超過閾值時,降低輸出電流或關(guān)斷驅(qū)動;
應(yīng)用場景:長時間高負(fù)載運(yùn)行、散熱不良導(dǎo)致的溫度升高。
2.4.3 欠壓 / 過壓保護(hù)
檢測對象:直流母線電壓;
保護(hù)閾值:欠壓<8V(12V 系統(tǒng))、過壓>16V(12V 系統(tǒng)),超閾值時切斷功率輸出;
應(yīng)用場景:電源波動、適配器故障、接線錯誤等導(dǎo)致的電壓異常。
2.4.4 堵轉(zhuǎn)保護(hù)
檢測邏輯:通過電流持續(xù)過大或電機(jī)無位置變化(閉環(huán)方案)判斷堵轉(zhuǎn);
保護(hù)動作:關(guān)斷輸出并鎖存故障,需重啟驅(qū)動板解除;
應(yīng)用場景:負(fù)載卡死、機(jī)械卡滯等導(dǎo)致的電機(jī)停轉(zhuǎn)。
硬件設(shè)計:電源輸入端添加 EMI 濾波器(共模電感 + X/Y 電容),電機(jī)接口并聯(lián) RC 吸收電路,抑制電磁干擾;
效果:符合 EN55032 Class B 標(biāo)準(zhǔn),避免驅(qū)動板干擾其他電子設(shè)備。
三、驅(qū)動板作用的工程驗證:典型應(yīng)用案例
以 “24V 兩相步進(jìn)電機(jī)直驅(qū)散熱風(fēng)扇” 為例,對比無驅(qū)動板直接控制與驅(qū)動板控制的性能差異:
| 測試項目 | 無驅(qū)動板直接控制 | 驅(qū)動板控制(TMC2209) | 驅(qū)動板作用體現(xiàn) |
| 啟動電流 | >5A(易燒電機(jī)) | 1.2A(恒流控制) | 恒流斬波限制電流 |
| 低速振動 | 明顯(整步驅(qū)動) | 無振動(1/32 微步) | 微步細(xì)分抑制振動 |
| 運(yùn)行噪聲 | 65dB(1 米) | 38dB(1 米) | 靜音斬波 + 微步優(yōu)化 |
| 高速失步 | 300rpm 時失步 | 600rpm 無失步 | 電流優(yōu)化 + 衰減模式調(diào)節(jié) |
| 過載能力 | 負(fù)載>0.5N?m 堵轉(zhuǎn) | 負(fù)載≤1.2N?m 正常運(yùn)行 | 過流保護(hù) + 轉(zhuǎn)矩穩(wěn)定控制 |
| 連續(xù)運(yùn)行溫度 | 電機(jī)外殼 85℃ | 電機(jī)外殼 55℃ | 恒流控制降低發(fā)熱 |
結(jié)論:驅(qū)動板通過多維度技術(shù)優(yōu)化,使步進(jìn)電機(jī)的運(yùn)行性能、可靠性與安全性得到質(zhì)的提升,是步進(jìn)電機(jī)控制方案不可或缺的核心組件。
四、驅(qū)動板作用的延伸:不同場景的定制化適配
驅(qū)動板的作用并非固定不變,而是根據(jù)應(yīng)用場景的需求進(jìn)行定制化優(yōu)化,體現(xiàn)出極強(qiáng)的場景適配性:
精密定位場景(如 3D 打印機(jī)、激光雕刻機(jī)):強(qiáng)化微步細(xì)分與閉環(huán)反饋功能,提升定位精度至 ±0.01mm;
低速靜音場景(如醫(yī)療設(shè)備、實驗室儀器):采用 TMC 靜音斬波技術(shù),優(yōu)化電流衰減模式,噪聲控制在 40dB 以下;
高負(fù)載場景(如工業(yè)閥門、小型機(jī)床):強(qiáng)化功率驅(qū)動能力,選用大電流 MOSFET 與柵極驅(qū)動芯片,支持 5A 以上輸出電流;
總線控制場景(如自動化生產(chǎn)線):集成 RS485/CAN 接口,支持多電機(jī)協(xié)同控制,簡化系統(tǒng)布線。
在步進(jìn)電機(jī)控制方案中,驅(qū)動板的作用貫穿 “指令接收 - 能量轉(zhuǎn)換 - 運(yùn)行優(yōu)化 - 安全保護(hù)” 全流程,是解決步進(jìn)電機(jī) “功率不足、性能不佳、安全無保障” 三大核心痛點的關(guān)鍵。其核心價值在于:通過硬件電路與控制算法的協(xié)同,將控制器的 “弱指令” 轉(zhuǎn)化為電機(jī)的 “強(qiáng)動力”,同時通過多重優(yōu)化與保護(hù)機(jī)制,實現(xiàn)步進(jìn)電機(jī)的精準(zhǔn)、穩(wěn)定、安全運(yùn)行。
未來,隨著半導(dǎo)體技術(shù)與控制算法的發(fā)展,驅(qū)動板的作用將進(jìn)一步延伸:集成更多智能感知功能(如電機(jī)故障診斷、負(fù)載識別)、支持更高精度的微步細(xì)分(1/1024 步以上)、采用寬禁帶器件(SiC/GaN)提升效率與功率密度,為步進(jìn)電機(jī)在高端制造、新能源、醫(yī)療設(shè)備等領(lǐng)域的應(yīng)用提供更強(qiáng)大的技術(shù)支撐。
審核編輯 黃宇















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論