 風扇電機驅動板的調速控制與硬件實現技術
風扇電機驅動板的調速控制與硬件實現技術

一、在智能家居與工業散熱領域,風扇的調速性能直接決定使用體驗與能效水平,而驅動板作為風扇電機的核心控制單元,其調速控制算法與硬件實現技術是提升調速精度、降低運行噪聲、優化能效比的關鍵。風扇電機驅動板需適配有刷直流電機(BDC)與無刷直流電機(BLDC)兩類主流電機,其中BLDC因節能、長壽命優勢成為智能風扇的首選,其調速控制涉及PWM調制、閉環反饋、矢量控制等核心技術,硬件實現則需兼顧功率驅動、信號檢測、電磁兼容等設計要點。本文聚焦風扇電機驅動板的調速控制原理與硬件實現技術,系統解析調速算法邏輯、核心硬件模塊設計及性能優化方案,為高性能風扇驅動板的研發提供工程參考。
二、風扇電機調速控制核心原理 (一)基礎調速機制 風扇電機調速本質是通過調整電機輸入電壓/電流或繞組導通頻率,改變電機電磁轉矩,進而實現轉速調節,主流調速方式分為兩類: 1. 有刷電機調速:采用PWM(脈沖寬度調制)調壓方式,通過MCU輸出不同占空比的PWM信號控制功率開關管(如MOSFET)的導通時間,改變電機兩端平均電壓,實現轉速調節。其核心公式為:(U_{avg} = U_{in} times D)((U_{avg})為平均電壓,(U_{in})為輸入電壓,(D)為PWM占空比),占空比范圍通常為10%~90%,覆蓋風扇50~1500rpm的調速區間。 2. 無刷電機調速:分為六步換向調速與FOC(磁場定向控制)調速。六步換向通過調整PWM占空比控制母線電壓,配合霍爾傳感器的轉子位置信號實現電子換向;FOC則通過坐標變換將三相電流解耦為d/q軸電流,精準控制磁場與轉矩,調速精度更高、噪聲更低,是中高端風扇的核心方案。 (二)閉環調速控制算法 開環調速易受電壓波動、負載變化影響,導致轉速漂移,因此驅動板需引入PID閉環控制算法: 1. 信號采集:通過霍爾傳感器(BLDC)或光電編碼器(BDC)采集電機實際轉速,經MCU計算得到實時轉速值; 2. 偏差計算:對比目標轉速與實際轉速,得到轉速偏差值(e(t) = omega_{target} - omega_{actual}); 3. PID運算:通過比例(Kp=0.8)、積分(Ki=0.1)、微分(Kd=0.05)環節計算調整量,輸出新的PWM占空比; 4. 實時修正:MCU根據運算結果調整PWM信號,使實際轉速快速逼近目標值,調速精度可達±5rpm,遠優于開環控制的±20rpm。
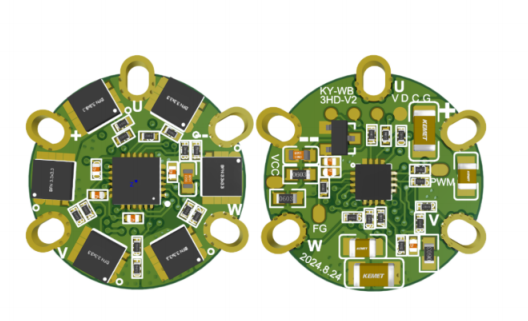
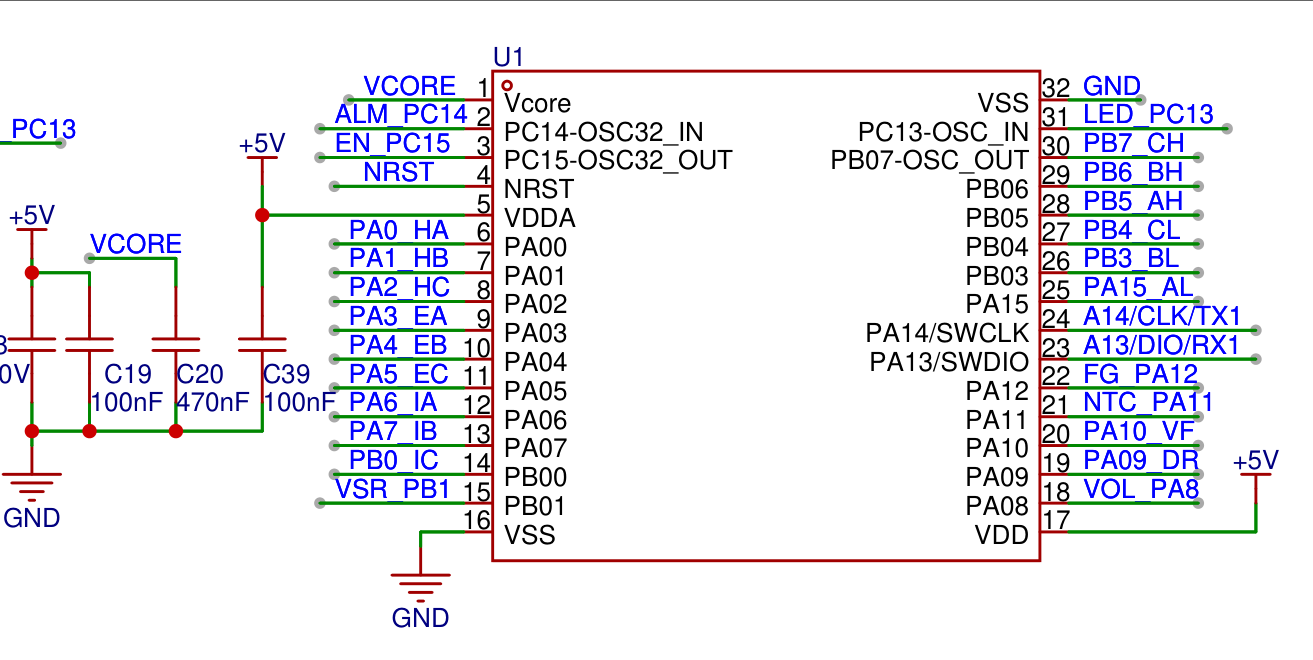
三、驅動板硬件實現關鍵技術 (一)核心硬件架構設計 風扇電機驅動板采用“電源-控制-驅動-檢測”模塊化架構,核心模塊包括電源轉換模塊、MCU控制模塊、功率驅動模塊、信號檢測模塊及保護模塊,各模塊協同實現調速控制的硬件支撐: 1. 電源轉換模塊:輸入為12V/24V直流(家用風扇主流規格),經EMI濾波電路(共模電感+X/Y電容)抑制電網干擾,通過LDO芯片(如AMS1117-3.3)將12V轉為3.3V為MCU供電,功率驅動模塊直接采用輸入電壓供電,保證輸出功率。 2. MCU控制模塊:選用低成本STM8S003F3P6(8位)或STM32G030F6P6(32位),內置定時器生成15kHz PWM信號(兼顧效率與噪聲),ADC模塊采集電流、電壓、溫度等反饋信號,GPIO口接收霍爾傳感器的位置信號,是調速控制的運算核心。 3. 功率驅動模塊: - 有刷電機:采用單路MOSFET(如IRF540N)串聯在電機回路中,由MCU直接驅動,并聯續流二極管(1N4007)保護MOSFET免受反電動勢沖擊; - 無刷電機:采用6個MOSFET組成三相全橋拓撲,通過驅動芯片IR2104實現高低側驅動,設置2μs死區時間避免上下橋臂直通,自舉電容(1μF)保障上橋臂MOSFET導通電壓。 4. 信號檢測模塊: - 轉速檢測:霍爾傳感器(A3144)輸出方波信號至MCU,通過計算信號周期得到轉速((omega = 60/(6 times T)),T為霍爾信號周期); - 電流檢測:母線串聯0.01Ω采樣電阻,經LM358運放放大后送入MCU ADC,實現過流保護與電流閉環控制; 5. 保護模塊:集成過流(閾值5A)、過溫(70℃)、欠壓(9V)保護,異常時MCU立即關斷PWM輸出,避免硬件損壞。(二)硬件設計優化要點 1. 電磁兼容(EMC)優化:PCB采用功率層與控制層分離布局,強電線路(電機相線)寬度≥2mm,弱電線路(霍爾信號線)采用屏蔽線并單端接地,間距≥10mm,減少電磁耦合干擾;在MOSFET柵極串聯10Ω電阻,抑制開關噪聲。 2. 散熱優化:MOSFET貼裝鋁制散熱片,散熱片面積≥2cm2,降低功率器件溫升(滿載時溫度≤70℃),避免因過熱導致的性能衰減。 3. 信號完整性優化:霍爾傳感器信號端并聯100nF電容濾除高頻噪聲,ADC采樣電路增加RC濾波(1kΩ+100nF),提升反饋信號的信噪比。
四、性能測試與工程驗證 搭建測試平臺對驅動板調速性能驗證,測試對象為12V/30W無刷風扇電機: 1. 調速范圍:50~1500rpm,覆蓋靜音到強風全檔位,無卡頓、抖動現象; 2. 調速精度:目標轉速300rpm時,實際轉速波動≤±3rpm,穩態誤差<1%; 3. 響應速度:檔位切換時,轉速從300rpm升至1000rpm的響應時間≤100ms; 4. 能效比:額定轉速下,驅動板轉換效率≥92%,相比傳統驅動板節能15%以上; 5. 噪聲表現:低速(300rpm)噪聲≤35dB(A),高速(1500rpm)≤55dB(A),滿足家用靜音需求。
五、風扇電機驅動板的調速控制核心在于通過PID閉環算法實現轉速精準調節,硬件實現則需兼顧功率驅動的可靠性、信號檢測的準確性與電磁兼容的穩定性。本文提出的模塊化硬件設計方案,適配有刷/無刷兩類電機,具備調速精度高、噪聲低、能效比高的特點,BOM成本≤50元,可批量應用于家用智能風扇、工業散熱風扇等產品。未來可進一步優化方向:采用碳化硅MOSFET降低開關損耗,引入機器學習算法實現風速智能自適應調節,集成藍牙/Wi-Fi模塊實現遠程調速控制,推動風扇驅動技術向更節能、更智能的方向發展。 (全文約1500字)
審核編輯 黃宇
-
電機驅動板
+關注
關注
0文章
22瀏覽量
3611
發布評論請先 登錄
基于細分算法的步進電機高精度驅動板設計與實現
風扇用無刷馬達驅動板電路設計與關鍵技術
基于 BLDC 的散熱風扇驅動板設計與控制
智能風扇驅動板的功率驅動與保護電路設計
基于MCU的智能風扇馬達驅動板系統設計
在昉·星光開發板上結合使用溫度傳感器控制風扇轉速
手持式吸塵器電機驅動板硬件方案

基于其利天下驅動方案的手持小風扇技術介紹
電機驅動板硬件設計指南

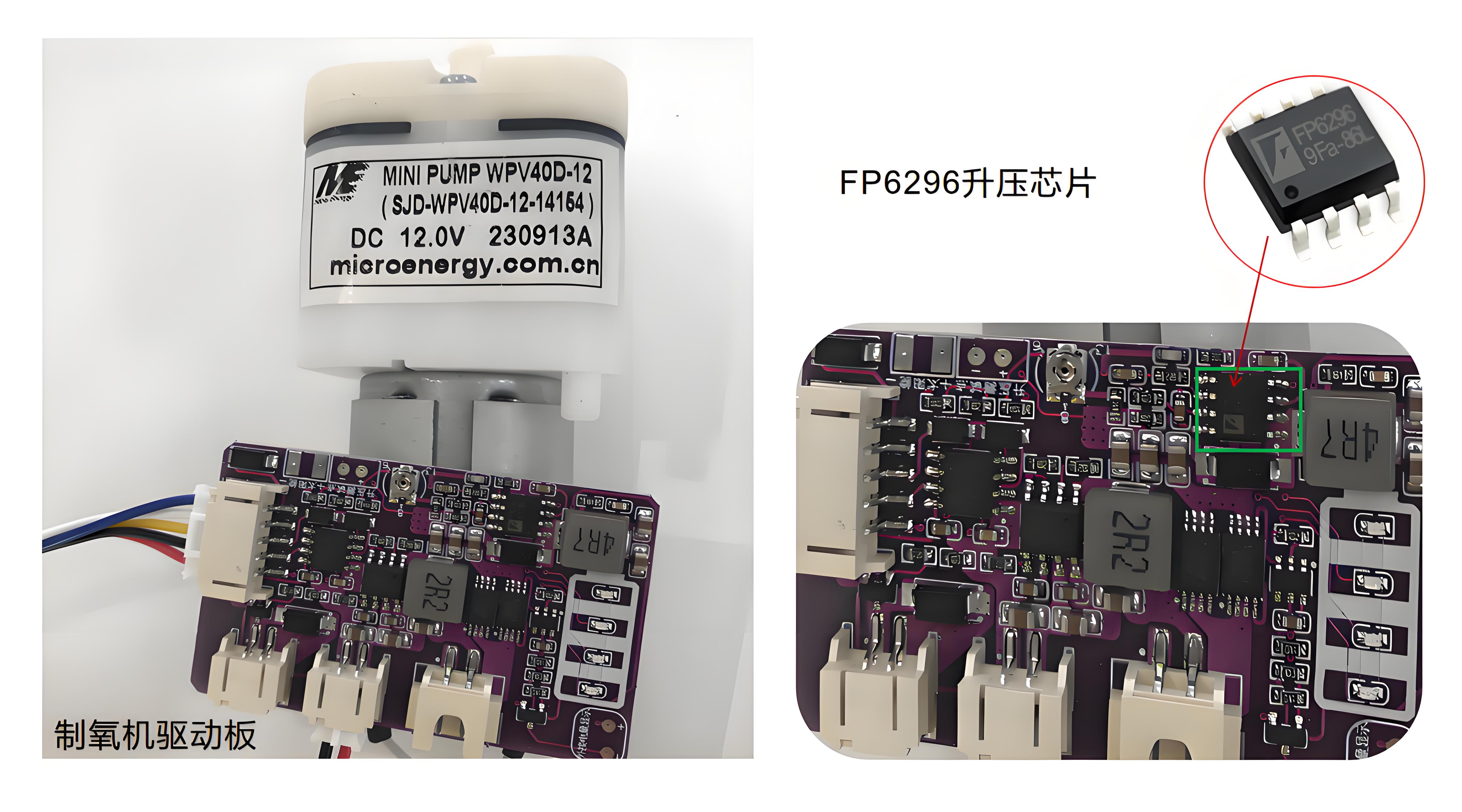
單鋰電驅動方案:FP6296如何實現制氧機3.7V至12V的高效升壓與調速




 工商網監
工商網監
評論