 高精度步進電機驅動板設計:從細分到閉環的全鏈路優化
高精度步進電機驅動板設計:從細分到閉環的全鏈路優化

步進電機的定位精度直接決定自動化設備的加工質量,高精度驅動板需突破開環驅動的失步瓶頸,通過細分驅動、閉環反饋與抗干擾設計,實現 ±0.01° 級定位精度。本文從硬件架構、核心技術、工程實現三個層面,詳解高精度步進電機驅動板的設計方案,適配工業機器人、精密儀器等高端應用場景。
一、驅動板總體架構設計
高精度驅動板采用 “主控 - 驅動 - 反饋 - 保護” 四層架構,核心目標是實現 “微步細分 + 位置閉環 + 電流精準控制”,整體架構如下:
主控單元:選用 STM32G071,具備高速運算能力與豐富外設,負責軌跡規劃、PID 運算、細分控制信號生成,支持 20MHz 以上脈沖輸出頻率。
驅動單元:采用 TMC5160 高端驅動芯片,集成高精度電流控制與 256 細分功能,搭配外置 MOSFET 擴展輸出能力,滿足大扭矩電機需求。
反饋單元:搭載麥歌恩 MT6825 磁編碼器(16 位絕對精度),實時采集電機軸位置,構建閉環控制回路,消除失步誤差。
保護單元:集成過流、過熱、欠壓、短路四重保護,響應時間≤1μs,保障系統可靠運行。
二、核心技術模塊設計
(一)細分驅動與電流控制
細分驅動是提升步距精度的基礎,結合精準電流控制可進一步降低轉矩脈動:
256 細分實現:通過 TMC5160 的 DIR/STEP 引腳與細分配置寄存器,將標準步距角(如 1.8°)拆分至 0.00703125°,配合正弦波電流驅動技術,轉矩波動降至 ±2% 以內,避免低速振動。
高精度電流控制:采用 “采樣電阻 + 高速比較器” 架構,串聯 0.02Ω 合金采樣電阻,通過 PWM 斬波(頻率 50kHz)維持繞組電流恒定;芯片內置 12 位 DAC 設定電流閾值,電流調節精度達 1mA,適配不同功率電機。
動態電流優化:根據電機轉速動態調整相電流,低速時提升電流保證扭矩,高速時降低電流減少發熱,通過 STM32 實時調控 TMC5160 的 IHOLD/IRUN 寄存器實現。
(二)閉環反饋控制設計
閉環控制是解決失步問題的核心,實現 “指令 - 反饋 - 補償” 的閉環鏈路:
反饋接口電路:MT6825 通過 SPI 接口(10MHz)與 STM32 通信,傳輸 16 位絕對角度數據,接口串聯 22Ω 限流電阻并鋪設地平面屏蔽,抑制電機電磁干擾;磁環與芯片氣隙控制在 0.5~1mm,同軸度偏差≤0.05mm,確保檢測精度。
閉環算法實現:STM32 每 10ms 讀取一次編碼器數據,通過以下步驟實現精準補償:
角度 - 步距轉換:將 16 位角度值映射為電機微步位置(256 細分下每步對應 0.00703125°);
偏差計算:對比目標位置與實際位置,采用 “最短路徑修正” 算法避免 360° 翻轉誤差;
PID 補償:通過增量式 PID 算法動態調整 STEP 信號頻率,最優參數經調試為 Kp=1.2、Ki=0.08、Kd=0.1,確保偏差快速收斂(≤50ms)。
(三)電源與抗干擾設計
電源穩定性與抗干擾能力直接影響控制精度:
雙電源供電架構:電機電源(VM)采用 12~48V 寬壓輸入,經共模電感 + X/Y 電容濾波后接入 TMC5160;邏輯電源(VCC)通過 DC-DC 轉換器(如 LM1117-3.3)輸出 3.3V,在芯片電源引腳旁并聯 0.1μF 陶瓷電容 + 10μF 電解電容實現去耦。
信號隔離與屏蔽:STEP/DIR 控制信號采用光耦 6N137 隔離,避免功率回路干擾邏輯信號;PCB 設計中,功率區(MOSFET、采樣電阻)與控制區(STM32、編碼器接口)物理隔離≥5mm,地平面采用單點連接,差分信號對稱布線。
三、工程實現與性能驗證
(一)PCB 關鍵設計要點
電源線寬按 “2A/1mm” 設計,采用 2oz 銅厚降低阻抗,電機輸出端預留續流二極管焊盤(FR107);
編碼器接口區域鋪設覆銅屏蔽層,接地良好,減少電磁輻射干擾;
驅動芯片下方設計 10mm×10mm 散熱覆銅,打 8 個 0.5mm 散熱過孔,提升散熱效率。
(二)核心性能測試
基于 57HS22 步進電機(扭矩 2.2N?m)的測試結果如下:
| 測試項目 | 測試結果 |
| 定位精度 | ±0.008°(256 細分 + 閉環) |
| 失步補償響應時間 | <40ms |
| 低速運行噪聲 | <32dB(5RPM) |
| 最大支持轉速 | 4000RPM |
| 全溫域(-40℃~85℃)溫漂 | ±0.015° |
連續 24 小時負載測試(負載 1.8N?m)中,驅動板無失步、過熱現象,位置偏差穩定在 ±0.01° 以內,滿足高精度設備長時間運行需求。
結語
高精度步進電機驅動板的設計核心在于 “細分提精、閉環防失、抗擾穩性”。通過 TMC5160 的 256 細分驅動、MT6825 的高精度反饋與 STM32 的 PID 閉環控制,可實現 ±0.01° 級定位精度,徹底解決傳統開環驅動的失步問題。該設計兼顧精度、可靠性與兼容性,可廣泛應用于精密加工、醫療設備、半導體制造等領域。未來可引入 AI 自適應 PID 算法,進一步優化復雜負載下的動態性能。
審核編輯 黃宇
-
步進電機
+關注
關注
153文章
3259瀏覽量
152537 -
驅動板
+關注
關注
21文章
247瀏覽量
33558
發布評論請先 登錄
基于麥歌恩磁編碼芯片的步進電機驅動板研發

高精度雕刻設備該如何選擇步進電機驅動芯片?

泡沫起升儀步進/伺服電機細分驅動技術:實現沖程毫米級定位的電子方案

智驅未來!NSD8389-Q1雙極性步進電機驅動器:精準掌控每一步
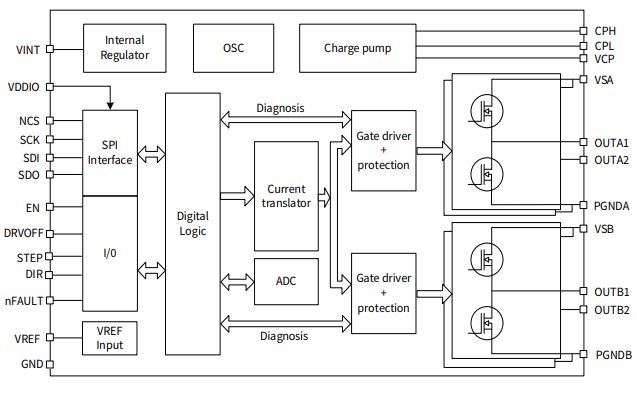
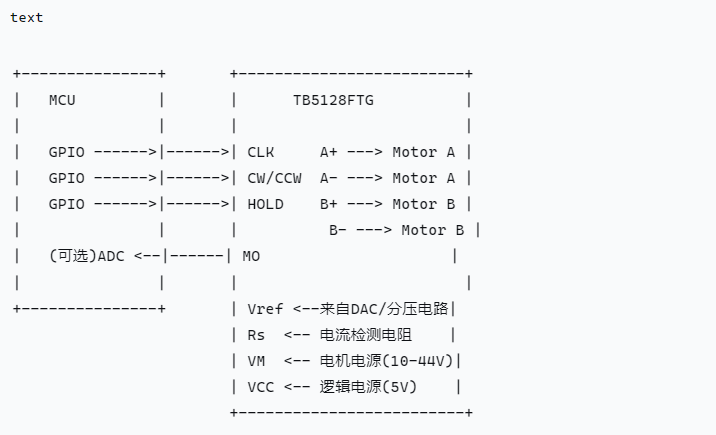
東芝的 TB5128FTG 這款步進電機驅動芯片。它是一款非常經典且性能強大的雙極步進電機驅動器




 工商網監
工商網監
評論