 無刷電機驅動板的功能架構及其在功率變換與矢量控制中的關鍵作用
無刷電機驅動板的功能架構及其在功率變換與矢量控制中的關鍵作用

無刷電機驅動板的功能架構及其在功率變換與矢量控制中的關鍵作用 摘要 無刷直流電機(BLDC)與永磁同步電機(PMSM)憑借高效率、高功率密度、長壽命優勢,已全面替代有刷電機與異步電機進入伺服、新能源、工業自動化、機器人等高精尖場景。 無刷電機驅動板并非單純功率開關模塊,而是集信號采集、運算控制、功率變換、閉環調節、故障保護、通訊交互于一體的運動控制核心載體 。本文系統性拆解驅動板硬件分層架構、功率變換底層機制、FOC矢量控制全鏈路協同邏輯,闡明驅動板在電流環/速度環/位置環閉環體系中的不可替代作用,為硬件選型、方案設計與算法落地提供理論與工程依據。
一、無刷驅動板整體功能分層架構 驅動板采用 三層硬件架構+軟件算法架構 ,實現從指令輸入到動力輸出的全鏈路閉環: 1.1 硬件三層架構 第一層:信號感知與模擬前端(控制側) 承擔所有反饋采集與信號預處理,是矢量控制精度的源頭: - 三相母線/下橋電流采樣(分流電阻/霍爾電流傳感器); - 磁編碼器/霍爾傳感器信號調理(AMR/TMR/差分霍爾、A/B/Z、UVW波形整形); - 電壓采樣(母線過壓/欠壓檢測)、NTC溫度采樣; - 低噪運放放大、差分濾波、偏置校準、抗混疊處理; - 多路高精度ADC同步采樣接口。 第二層:主控運算與邏輯驅動(核心中樞) 驅動板的“大腦”,承載所有控制算法與邏輯調度: - MCU/DSC/專用FOC主控芯片,運行三環控制、坐標變換、調制算法; - PWM波形生成、死區配置、相位同步、斬波控制; - 電平隔離、柵極驅動邏輯校驗、互鎖防直通; - 外設通訊(CAN/RS485/UART/PWM/以太網)、上位機指令解析。 第三層:功率變換與能效輸出(功率側) 實現弱電控制強電,是電能與機械能轉換的執行端: - 三相全橋逆變電路(NMOS/IGBT/SiC功率管); - 柵極驅動芯片(GaN/MOS專用驅動,帶米勒鉗位、UVLO); - 母線濾波電容、續流回路、緩沖吸收、功率散熱架構; - 整流/預充電回路(高壓大功率機型)。 1.2 軟件算法架構 嚴格對應硬件分層,形成閉環聯動: 指令解析→位置環→速度環→電流環→Clarke/Park變換→SVPWM調制→功率管開關→電機出力→反饋回采→誤差修正。
二、驅動板在功率變換中的底層核心作用 2.1 直流到交流的電能重構(逆變核心) 電池/開關電源輸出恒定直流電,無法直接驅動永磁同步電機旋轉;驅動板通過 三相全橋SVPWM正弦逆變 ,把平直母線電壓重構為 幅值、頻率、相位連續可調的三相正弦交流電 : - 通過上下橋臂高頻交替導通,合成等效相電壓; - 依靠PWM占空比精細調節每相電壓矢量; - 輸出旋轉磁場,牽引轉子同步跟隨。 若無驅動板的精密功率變換,電機僅能通電鎖死或無序抖動,無法平穩旋轉。 2.2 電流精細化管控(力矩線性化基礎) 功率變換環節直接決定繞組電流品質: - 分流采樣實時抓取瞬時相電流,配合驅動板AFE調理,實現電流毫秒/微秒級精準管控; - 抑制開關諧波、尖峰電流、續流震蕩,降低轉矩脈動; - 限制峰值電流與平均電流,防止磁鋼退磁、功率管燒毀。 2.3 能效優化與寬域調速 驅動板通過動態調整調制深度與開關頻率: - 低速低壓大電流,保證啟動力矩; - 高速弱磁升壓擴速,拓展電機運行區間; - 優化開關損耗與導通損耗,提升整機效率、降低溫升。 2.4 硬件級安全功率防護 功率側集成硬保護機制,優先級高于軟件: - 上下橋互鎖防直通、硬件死區閉鎖; - 過流硬關斷、過溫降功率、母線欠壓/過壓封鎖PWM; - 短路瞬態保護(μs級關斷功率管)。
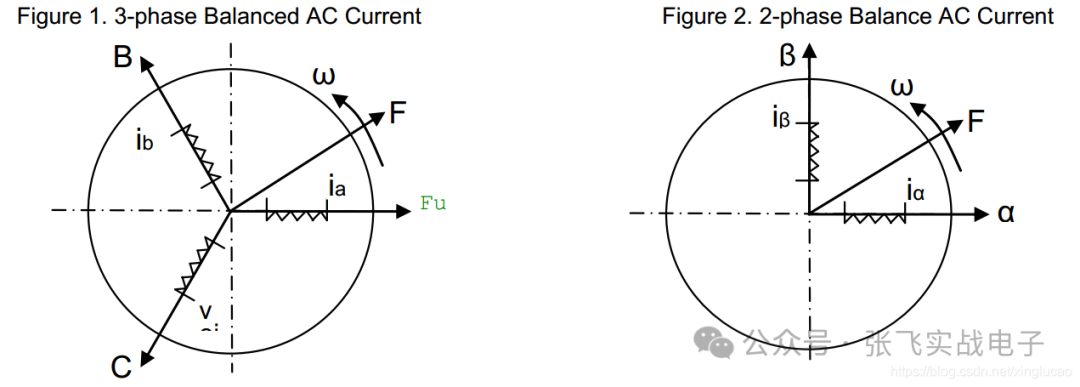
三、驅動板在FOC矢量控制中的關鍵協同機制 磁場定向控制(FOC)是高端無刷電機的標配, 整套算法必須深度依托驅動板硬件才能落地 ,驅動板是矢量控制從理論到工程的唯一載體。 3.1 支撐坐標變換的高精度采樣基底 FOC核心依賴兩次坐標變換: 1. Clarke:三相靜止→兩相靜止αβ; 2. Park:兩相靜止→兩相旋轉dq。 變換前提: - 驅動板必須實現 三相電流同步高精度ADC采樣 ; - 必須實時讀取磁編碼器精準電角度(配合MT6835/NSM301x/TMR編碼器); 角度+電流雙精準,才可以把定子電流拆解為: - Id(勵磁電流) :控制磁場弱磁/增磁; - Iq(轉矩電流) :直接決定輸出力矩大小。 驅動板采樣噪聲、采樣不同步、溫漂偏大,會直接導致矢量解算畸變、力矩抖動、低速爬行。 3.2 三環閉環的硬件執行載體 1)電流環(內環,最高帶寬) 依托驅動板高速ADC+高頻PWM,實現10~50kHz超高速調節: 快速抑制負載擾動、電流突變,保證力矩瞬時響應,是矢量控制的根基。 2)速度環(中環) 驅動板讀取編碼器實時轉速,對比目標轉速,動態輸出Iq力矩指令,實現穩速、抗擾、加減速平順。 3)位置環(外環) 依托高精度磁編碼器(21位AMR/TMR),驅動板完成位置比對、軌跡插補、電子齒輪、精準定位,實現伺服級絕對位置控制。 3.3 SVPWM矢量調制的硬件輸出通道 算法算出dq軸電壓后,經反Park/反Clarke還原為三相調制波; 驅動板最終通過 SVPWM空間矢量調制 輸出最優開關序列: - 電壓利用率最高; - 諧波最小; - 轉矩脈動最低; - 適配高速、高精度、低噪音運行。 3.4 電角度校準與磁極對中落地 驅動板硬件支持: - 上電磁極初始化(脈沖注入/盲對中); - 配合磁編碼器完成機械角度→電角度換算; - 修正安裝偏心、磁鋼誤差帶來的相位偏差; 保障FOC磁場定向永不失鎖。
四、功能模塊與關鍵技術對應關系一覽表
| 驅動板核心模塊 | 支撐能力 | 對功率變換/矢量控制的價值 |
| 電流采樣AFE | 同步高精度電流采集 | FOC坐標變換、電流閉環、力矩穩定 |
| 編碼器信號接口 | 角度/轉速實時回傳 | Park變換、電角度同步、位置閉環 |
| PWM發生器+柵極驅動 | 精密逆變波形輸出 | SVPWM調制、三相正弦電壓合成 |
| 三相功率逆變橋 | DC/AC能量轉換 | 旋轉磁場生成、電機出力 |
| 主控運算單元 | FOC算法+三環調節 | 力矩/速度/位置全維度精準控制 |
| 硬件保護回路 | 過流/過溫/短路硬閉鎖 | 矢量失控、功率異常時整機安全 |
| 通訊交互接口 | 指令下發、參數標定 | 軌跡控制、在線調參、系統聯動 |
五、不同定位驅動板的差異化表現 1. 低端方波驅動板(六步換相) 僅實現基礎功率變換,無精準電流采樣、無高精度角度解析,無法跑標準FOC,轉矩脈動大、噪音高,僅限風機、水泵、普通電動工具。 2. 中端FOC驅動板(基礎矢量控制) 支持雙電阻采樣、普通霍爾/基礎磁編,實現標準dq矢量控制,適配常規閉環步進、通用工業電機。 3. 高端伺服驅動板(高精度全鏈路) 搭配21位AMR(MT6835)/TMR磁編碼器、三電阻高精度同步采樣、SiC/GaN功率器件,超高電流環帶寬,支持力矩模式、弱磁擴速、高精度定位,用于機器人關節、精密機床、高端伺服。
六、 1. 在 功率變換維度 :無刷驅動板是直流電能到可控三相交流電能的重構核心,依托三相逆變與SVPWM實現電壓/頻率/相位靈活調控,決定電機效率、溫升、調速范圍與出力能力; 2. 在 矢量控制維度 :驅動板是FOC算法的硬件基石,依靠高精度電流采樣、實時角度解析、高頻PWM調制,完成坐標變換、三環閉環與磁場精準定向; 3. 驅動板的硬件采樣精度、功率級穩定性、信號抗干擾能力,直接決定整套無刷系統的力矩平順性、定位精度、動態響應與長期可靠性。 簡言之: 沒有高性能驅動板,再先進的矢量控制算法也無法落地;沒有合理的功率變換架構,再優質的電機與編碼器也無法發揮性能。
審核編輯 黃宇
-
無刷電機
+關注
關注
60文章
982瀏覽量
49612 -
驅動板
+關注
關注
21文章
261瀏覽量
33597
發布評論請先 登錄
無刷電機驅動板在位置傳感、功率驅動及保護機制中的綜合作用
無刷電機PCBA板廠家

解析液晶模塊的技術架構和關鍵作用

合科泰MOSFET在直流無刷電機驅動板的應用

霍爾IC在無刷電機中的應用與原理
辰達MOSFET在DC-DC變換器中的關鍵作用與優化策略



 工商網監
工商網監
評論