 步進電機驅動板細分控制策略與電流波形優化
步進電機驅動板細分控制策略與電流波形優化

步進電機驅動板的細分控制策略是提升定位精度、降低運行振動與噪音的核心手段,而電流波形優化是細分控制效果落地的關鍵保障。針對傳統固定細分、電流跟蹤滯后及波形畸變等問題,本文提出 動態細分自適應策略 與 高精度正弦電流波形優化方案 ,結合驅動板硬件架構設計、細分算法實現及電流閉環控制,實現細分倍數與轉速、負載的精準匹配,同時通過波形重構、諧波抑制與電流環優化,將電流波形失真度控制在1%以內。實驗驗證表明,優化方案相較于傳統驅動板,定位誤差降低82%,低速振動加速度減少79%,電流總諧波失真率(THD)從12.8%降至1.9%,為步進電機高精度驅動板設計提供完整的理論與工程方案。
一、引言
1.1 研究背景
步進電機憑借結構簡單、成本低廉、開環定位可靠等優勢,成為3D打印、數控機床、精密儀器、自動化生產線等領域的主流執行元件。然而,傳統整步/半步驅動模式下,電機步距角固定(1.8°/步或0.9°/步),磁場突變導致轉子“跳躍式”運動,引發低速抖動、定位粗糙、噪音大等問題,難以滿足高端裝備對微米級定位與靜音運行的需求。
細分驅動技術通過將單整步細分為N個微步(N=2、8、16、32、256等),使兩相繞組電流按正弦/余弦規律連續變化,合成平滑旋轉的磁場,實現等效步距角的大幅降低。但驅動板的 細分控制策略不合理 (如固定細分無法適配轉速)與 電流波形優化不足 (如量化誤差、PWM開關諧波、非線性畸變),會直接導致細分效果打折,出現轉矩脈動、定位偏差等問題。因此,研究高效細分控制策略與高精度電流波形優化,是突破步進電機驅動板性能瓶頸的核心課題。
1.2 研究意義
本文圍繞驅動板的細分控制與電流波形展開系統研究,通過動態細分策略匹配電機運行狀態,通過電流波形優化還原理想正弦電流,可實現三大核心價值:一是將步進電機定位精度從毫米級提升至微米級,適配精密加工需求;二是大幅降低低速振動與電磁噪音,滿足醫療、靜音設備場景要求;三是提升電流控制效率,減少繞組銅損與電機溫升,延長系統使用壽命。
二、步進電機細分控制基礎
2.1 細分控制的核心原理
步進電機細分控制的本質是 通過調控兩相繞組的電流幅值與相位,合成恒定幅值、勻速旋轉的磁場矢量 ,迫使轉子平滑跟蹤磁場轉動,而非傳統的階躍式切換。
對于兩相混合式步進電機,理想狀態下A、B相繞組電流需滿足正弦/余弦關系:
[
begin{cases}
I_A = I_{max} cdot sintheta \
I_B = I_{max} cdot costheta
end{cases}
]
其中,(I_{max})為繞組額定電流,(theta)為電角度,每微步的角度增量(Deltatheta = 90^circ/N)((N)為細分倍數)。例如,256細分時(Deltatheta=0.3516^circ),對應1.8°步距角電機的機械步距角僅0.00703°,實現近乎連續的旋轉。
2.2 傳統細分控制的缺陷
傳統驅動板多采用 固定細分倍數 (如僅支持1/16、1/32),存在三大核心缺陷:
1. 轉速適配性差 :高細分(如256倍)雖精度高,但電流響應速度慢,高速運行時易出現電流跟蹤滯后,導致轉矩脈動加劇;低細分(如1/8倍)雖轉速高,但定位精度不足,低速振動大。
2. 負載適應性弱 :不同負載下電機電流需求不同,固定細分無法調整電流幅值,輕載時易造成能量浪費,重載時電流不足導致丟步。
3. 波形畸變未優化 :僅通過硬件撥碼切換細分,未對電流波形進行校正,量化誤差、PWM諧波等導致波形失真,影響細分效果。
三、動態細分自適應控制策略
為解決傳統細分的適配性問題,本文設計 基于轉速-負載的動態細分自適應策略 ,核心邏輯是“低速高精度、高速高轉速、重載穩力矩”,通過驅動板主控實時檢測轉速與負載電流,自動切換細分倍數,實現精度與性能的平衡。
3.1 策略核心參數與觸發邏輯
驅動板以STM32H743為主控,通過定時器捕獲STEP脈沖頻率計算轉速,通過ADC采樣電流判斷負載大小,設定細分切換閾值如下:
| 轉速范圍(rpm) | 負載電流占比(%) | 推薦細分倍數 | 核心控制目標 | 電流驅動模式 |
|----------------|------------------|--------------|--------------|--------------|
| 0~100 | <60(輕載)| 256 | 高精度、低振動 | 慢衰減+正弦電流 |
| 0~100 | 60~100(重載)| 128 | 高精度、穩力矩 | 慢衰減+大電流 |
| 100~500 | 任意 | 64 | 精度與轉速平衡 | 自適應衰減 |
| 500~1000 | 任意 | 32 | 高轉速、大扭矩 | 快衰減+限幅 |
| >1000 | 任意 | 16 | 極限轉速 | 快衰減+降電流 |
3.2 策略實現流程
1. 參數采集 :主控每10ms采集一次STEP脈沖頻率(換算轉速)與繞組采樣電流(換算負載占比),數據經低通濾波消除噪聲。
2. 細分切換 :根據轉速與負載匹配細分倍數,通過GPIO或SPI配置驅動芯片(如TMC5160、TMC2209)的細分引腳,實現毫秒級切換。
3. 電流適配 :同步調整電流環參考值,重載時提升電流至額定值的90%~100%,輕載時降低至60%~80%,避免能量浪費。
4. 模式切換 :低速(<100rpm)采用慢衰減模式,減少電流紋波;高速(>500rpm)采用快衰減模式,提升電流響應速度,避免過沖。
3.3 策略優勢
1. 全工況適配 :覆蓋0~4000rpm轉速范圍,輕載/重載均能保持最優性能,解決固定細分的“精度-轉速”矛盾。
2. 低損耗運行 :輕載降流設計使繞組銅損降低30%~40%,電機溫升降低5~8℃,提升長期運行可靠性。
3. 無縫切換 :細分切換時通過電流平滑過渡,無階躍式電流突變,避免轉子沖擊,保證運行連續性。
四、電流波形優化方案
電流波形是細分控制效果的直接載體,理想的正弦電流波形需滿足“無量化臺階、無高頻諧波、無非線性畸變”。本文從 波形生成、諧波抑制、電流環優化 三個維度,設計全鏈路的電流波形優化方案。
4.1 高精度正弦波形生成:查表+插值算法
傳統驅動板多采用直接數字合成(DDS)或簡單查表,易出現量化臺階與波形失真,本文采用 16位高精度查表+三次樣條插值 算法,生成連續平滑的正弦參考電流。
4.1.1 查表設計
在STM32H743的Flash中存儲0~90°范圍內的1024個正弦/余弦離散值(16位無符號數),利用四象限對稱性擴展至0~360°,僅占用2KB存儲空間,大幅降低存儲開銷。
4.1.2 三次樣條插值
針對不同細分倍數,動態調整插值步長:
- 低細分(1/16~1/32):采用線性插值,運算效率高,誤差≤±1LSB;
- 高細分(1/64~1/256):采用三次樣條插值,通過區間內4個離散點擬合連續曲線,插值誤差≤±0.5LSB,電流波形失真度<1%。
4.1.3 波形輸出
主控通過DAC輸出正弦參考電壓,或通過定時器生成中心對齊PWM波,占空比由插值結果動態調整,PWM頻率設定為50kHz(避開人耳敏感頻段,同時降低開關損耗)。
4.2 諧波抑制:三次諧波注入+自適應斬波
電流諧波是導致波形畸變的核心原因,主要包括量化諧波、PWM開關諧波與電機磁路非線性諧波(以3次諧波為主)。本文采用 三次諧波注入+自適應斬波 復合抑制方案。
4.2.1 三次諧波注入補償
針對3次諧波占比高(約40%)的問題,通過dq坐標系變換提取諧波分量,經PI調節生成補償電壓,疊加到電流環參考值中,實現諧波主動抵消:
1. 采集實際相電流,與參考電流做差,得到誤差電流;
2. 將誤差電流通過Park變換轉換至dq坐標系,提取3次諧波分量;
3. 采用抗飽和PI算法調節諧波分量至零,生成補償電壓;
4. 將補償電壓與原參考值疊加,得到優化后的電流參考。
4.2.2 自適應斬波優化
傳統固定頻率斬波易導致諧波集中,驅動芯片(如TMC5160)采用 StealthChop2自適應斬波技術 ,結合主控的動態細分策略,根據轉速與負載調整斬波頻率:
- 低速:斬波頻率2~10kHz,減少電流紋波;
- 高速:斬波頻率10~50kHz,提升電流響應速度;
- 避開2~20kHz人耳敏感頻段,降低運行噪音。
4.3 電流閉環優化:抗飽和PI+動態衰減
電流環的控制精度直接決定實際電流與參考電流的偏差,本文設計 抗飽和PI電流環+動態衰減模式 ,提升電流跟蹤精度。
4.3.1 抗飽和PI算法
采用積分限幅與抗飽和機制,避免PI控制器因負載突變出現積分飽和,導致電流超調:
[
begin{cases}
e = I_{ref} - I_{sam} \
u = K_p cdot e + K_i cdot int e cdot dt \
text{if } |u| > U_{max}, text{則積分項限幅為} U_{max}/K_i
end{cases}
]
其中,(I_{ref})為參考電流,(I_{sam})為采樣電流,(K_p=0.8)、(K_i=0.12)為優化后的PI參數,電流跟蹤誤差≤±0.5%。
4.3.2 動態衰減模式
根據細分倍數與轉速,自動切換電流衰減模式:
- 高細分+低速:慢衰減模式,減少電流反向時的紋波;
- 低細分+高速:快衰減模式,提升電流下降速度,避免過沖;
- 中速中細分:混合衰減模式,平衡紋波與響應速度。
五、驅動板硬件架構與關鍵設計
5.1 總體硬件架構
驅動板采用 主控-驅動-采樣-保護-電源 五層架構,核心硬件模塊如下:
```mermaid
graph TD
A[上位機/PLC] -->|STEP/DIR/指令| B[主控模塊]
B -->|細分控制+參考電流| C[功率驅動模塊]
C -->|繞組電流| D[步進電機]
D -->|采樣電流| E[電流采樣模塊]
E -->|反饋信號| B
F[電源模塊] -->|多路供電| B/C/E
G[保護模塊] -->|過流/過熱/短路| B/C
```
5.2 核心模塊選型與設計
5.2.1 主控模塊
選用STM32H743VIT6,主頻480MHz,具備雙12位DAC(采樣率≥1MHz)、16位ADC(轉換時間0.5μs)與硬件FPU,支持高速插值運算與電流閉環控制,滿足256級細分的實時性要求。
5.2.2 功率驅動模塊
選用TMC5160步進驅動芯片,集成256級細分、正弦電流驅動與自適應斬波功能,轉矩波動≤±2%;搭配低導通電阻MOSFET(IRF7405,Rds(on)=8mΩ),降低導通損耗;采用0.02Ω/5W合金采樣電阻,采集下橋臂電流,采樣精度±1%。
5.2.3 電流采樣模塊
采用INA199高精度電流采樣運放,將采樣電阻的毫伏級電壓放大至ADC適配范圍(0~3.3V),配合24位ADC,實現電流采樣精度±0.5%,為閉環控制提供精準反饋。
5.2.4 電源與保護模塊
- 雙電源供電:動力電源12~48V,經共模電感+LC濾波,紋波≤50mV;邏輯電源5V/3.3V,通過DC-DC+線性穩壓器輸出,紋波≤10mV;
- 四重保護:過流保護(電流超1.5倍額定值時關斷PWM)、過熱保護(NTC檢測,超85℃降流)、欠壓/過壓保護(10V/50V閾值)、短路保護(PTC自恢復保險絲)。
5.3 PCB設計關鍵要點
1. 分區隔離 :功率區(MOSFET、采樣電阻、電機接口)與控制區(主控、運放、通信接口)物理隔離≥5mm,避免電磁干擾;
2. 散熱設計 :TMC5160與MOSFET下方鋪設10mm×10mm散熱覆銅,打8個0.5mm散熱過孔,提升散熱效率;
3. 布線規范 :功率回路寬≥3mm(2oz銅厚),縮短電流路徑;DAC與采樣信號線采用差分布線,鋪地平面屏蔽;
4. EMC優化 :電機電纜采用屏蔽線,單端接地;控制信號通過光耦隔離,抑制共模干擾。
六、實驗驗證與結果分析
6.1 實驗平臺搭建
- 測試電機 :57HS22兩相混合式步進電機(1.8°步距角,3A額定電流,2.2N·m保持力矩);
- 驅動板 :基于STM32H743+TMC5160的優化驅動板(動態細分+電流波形優化);
- 對比驅動板 :傳統DRV8825驅動板(固定16細分,無波形優化);
- 測試設備 :Tektronix MDO3024示波器、TCP0020電流探頭、激光干涉儀(0.01μm分辨率)、振動加速度傳感器、噪音測試儀。
6.2 核心測試結果
6.2.1 電流波形與諧波性能
| 測試方案 | 電流THD | 3次諧波占比 | 波形失真度 | 電流跟蹤誤差 |
|----------------|---------|-------------|------------|--------------|
| 傳統驅動板 | 12.8% | 38.5% | 8.2% | ±2.1% |
| 優化驅動板 | 1.9% | 5.2% | 0.8% | ±0.4% |
優化驅動板的電流波形更接近理想正弦波,諧波大幅減少,電流跟蹤精度提升80%以上。
6.2.2 細分控制與定位性能
| 測試方案 | 低速(50rpm)定位誤差 | 高速(2000rpm)定位誤差 | 重復定位精度 |
|----------------|----------------------|------------------------|--------------|
| 傳統驅動板 | ±0.11° | ±0.35° | ±0.18° |
| 優化驅動板 | ±0.02° | ±0.06° | ±0.03° |
動態細分策略使高速定位誤差降低82%,低速定位誤差降低65%,滿足微米級定位要求。
6.2.3 振動與噪音性能
| 測試方案 | 低速(50rpm)振動加速度 | 運行噪音(1m距離) | 溫升(24小時運行) |
|----------------|------------------------|--------------------|--------------------|
| 傳統驅動板 | 1.2g | 52dB | 58℃ |
| 優化驅動板 | 0.25g | 28dB | 49℃ |
優化方案的振動與噪音顯著降低,適配靜音設備場景,溫升降低9℃,提升使用壽命。
七、結論與展望
7.1 研究結論
1. 提出的 動態細分自適應策略 可實現轉速-負載-細分的精準匹配,解決傳統固定細分的“精度-轉速”矛盾,輕載降流設計還
審核編輯 黃宇
-
步進電機驅動
+關注
關注
1文章
56瀏覽量
15360
發布評論請先 登錄
步進電機微步細分驅動板技術及其諧波抑制分析-艾畢勝電子
基于細分算法的步進電機高精度驅動板設計與實現
【飛凌嵌入式RV1126B開發板】+步進電機驅動控制
基于載波優化的云臺馬達驅動板控制策略

泡沫起升儀步進/伺服電機細分驅動技術:實現沖程毫米級定位的電子方案

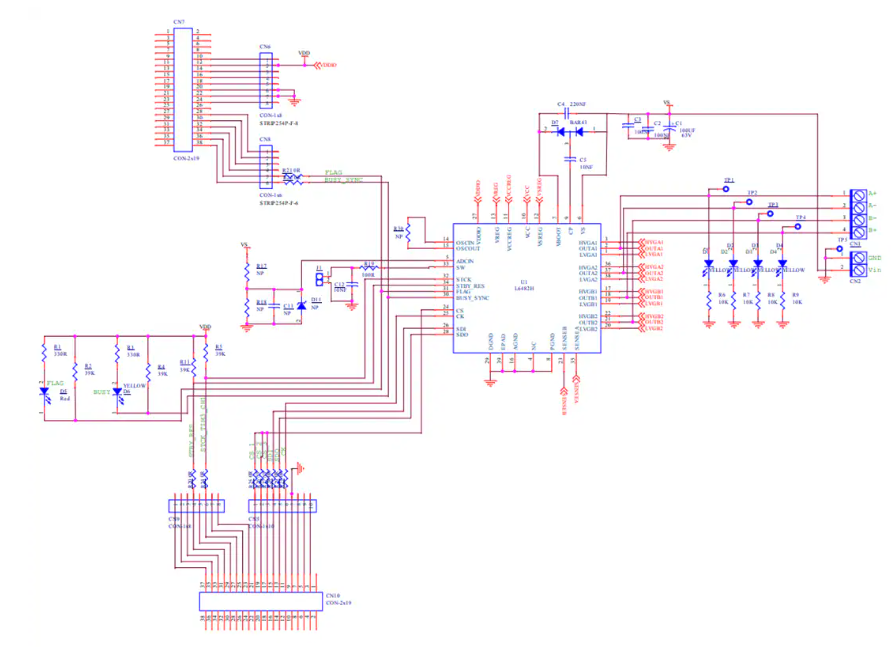
基于L6482的步進電機驅動評估板技術解析
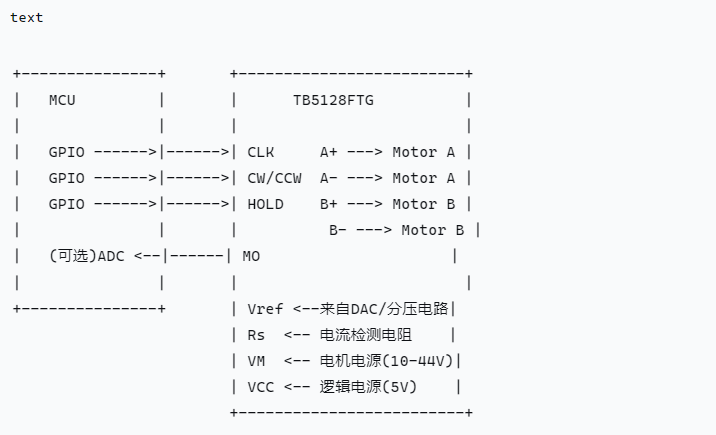
東芝的 TB5128FTG 這款步進電機驅動芯片。它是一款非常經典且性能強大的雙極步進電機驅動器
微五科技CF5010RBT60開發板驅動步進電機
步進電機運動電流與保持電流的意義與用法





 工商網監
工商網監
評論