開源項目,從感知到控制、從定位到構圖、從導航到可視化,都使用ROS作為基礎。 而不久前AMD XILINX推出了以ROS2為中心的增強機器人自適應計算能力的硬件加速方法——Kria Robotics Stack(KRS),通過硬件加速為機器人帶來自適應計算能力。 從ROS到
2022-12-12 06:25:00 2809
2809 自適應計算包含能夠針對具體應用進行優化的硬件,例如現場可編程門陣列 (FPGA),它是一個功能強大的解決方案,專門用于基于AI 的邊緣應用。
2021-07-23 17:27:393012 
機器人是一種系統級的系統,它由感知周邊環境的傳感器、根據感知采取行動的致動器和負責處理數據的計算構成,用于對其應用做出連貫一致的響應。
2021-11-11 15:02:533084 由于機器人行為建立在 ROS 節點交互的結果之上,因此用于這個用途的加速器通過從總體上減少 ROS 和 ROS 2 計算圖數據流,顯著影響總時延。
2021-11-11 15:18:513711 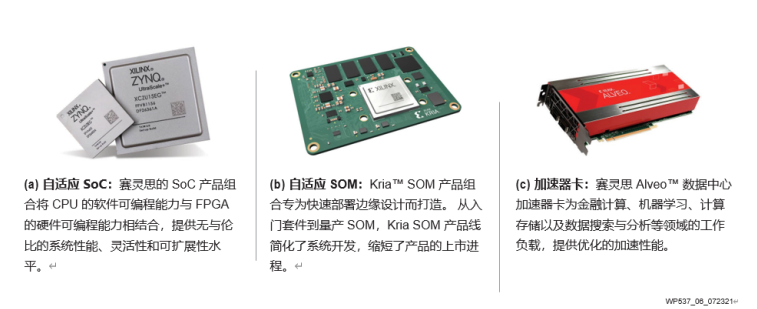
第一個支柱是 ament ROS 2 構建系統的擴展。ament_vitis(1)通過一系列 CMake 宏和實用工具實現這些擴展,將 Vitis 工具包含到 ROS 2 生態系統內。
2021-11-11 15:24:553123 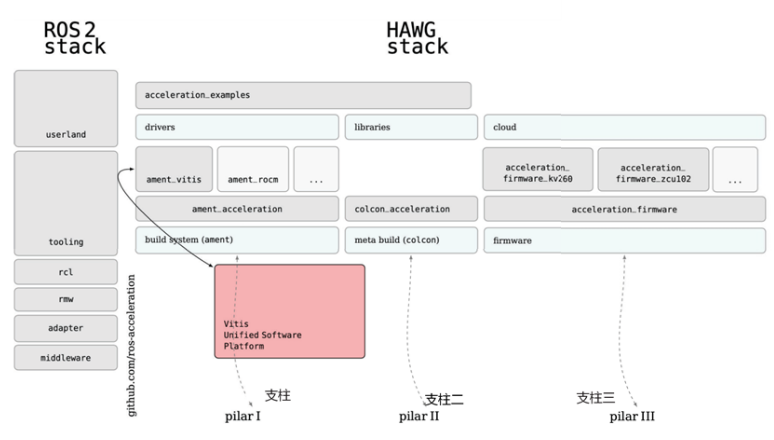
CPU 和 GPU 擅長控制流計算。它們的控制驅動機器模型基于控制令牌,控制令牌提示應執行語句的時間。
2021-11-12 15:30:004527 隨著 ROS 超越學術層面開始進入工業和其他領域,ROS 的局限性也日漸凸顯,如缺乏嵌入式支持和深度嵌入的原生支持,單機器人軟件架構,無實時功能和缺乏安全性等。
2021-11-11 15:35:563408 
AMD Versal AI Edge 自適應計算加速平臺之準備工作,包含軟件環境、硬件環境。
2024-03-07 15:49:101723 
【ALINX 技術分享】AMD Versal AI Edge 自適應計算加速平臺之 Versal 介紹,以及Versal 芯片開發流程的簡介。
2024-03-07 16:03:132554 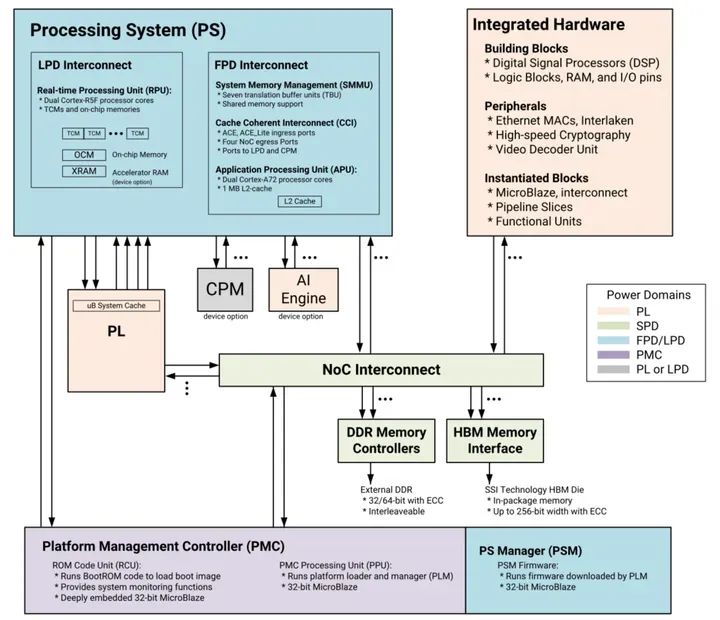
ROS 2 Crystal Clemmys版機器人操作系統補充說明
2020-06-10 11:29:00
ROS系統是什么
ROS(Robot Operating System)是一個適用于機器人的開源的元操作系統。它提供了操作系統應有的服務,包括硬件抽象,底層設備控制,常用函數的實現,進程間消息傳遞
2023-11-30 16:01:01
的快速發展,智能機器人設備已成為工業自動化體系的佼佼者,而智能機器人設備核心—ROS系統,是機器人領域的集大成者,主要應用于機器人控制領域,如AGV工業機器人控制器、智能機械臂控制器、機器人導航系統等
2024-07-09 11:38:26
及應用機器人技術基礎(熊有倫)(此書比較早) 2.運動規劃書籍:Principles of Robot Motion Theory, Algorithms
2019-05-22 06:53:10
機器人技術和機器學習正成為嵌入式系統硬件和軟件供應商的下一個重大事件。嵌入式系統可以通過網絡連接和物聯網(IoT)來傳遞信息、共享資源。無論是智能,低能耗,邊緣設備,中間網關還是計算節點,都需要
2021-12-20 06:03:10
機器人的定義是什么?機器人優點和缺點是什么?機器人是由哪些部分組成的?工業機器人的應用有哪些?
2021-07-05 06:48:21
安靜高效的機器人正在接管——阻止它們已經太遲了。不,這不是機器人世界末日另一個可怕的故事。這是關于您下一設計硬件預算和規劃面臨威脅的問題。雖然您無法阻礙技術變革,但是您可以預測其影響。
2019-07-17 08:08:16
機器人編程需要什么軟件
2023-11-01 07:34:30
Xeon+FPGA平臺和Xeon Phi系列產品來推動異構計算的實施。那么,在我們所關心的機器人領域,情況又是如何?機器人是復雜的機電一體化裝置,綜合運用了機械與精密機械、微電子與計算機、自動控制與驅動、傳感器
2017-03-20 17:54:31
地將設想付諸實現,對實時嵌入式和FPGA硬件進行無縫部署,并通過整合各種處理平臺、第三方軟件工具和預制機器人平臺,達到軟件的最大靈活性。 “通常制造一個新的機器人需要從頭做起。如果沒有軟件標準,代碼重復
2019-05-21 07:40:08
全網最實用的STM32和ROS機器人的串口通信方案
2021-08-11 07:27:07
了完整的安全防護體系。
第12章將可靠性問題分為兩大類:機器人本體的可靠性和計算系統的可靠性。本體可靠性涉及溫度、碰撞、斷電、輻射等物理環境因素。計算系統可靠性則關注硬件故障、軟件錯誤等技術層面的挑戰
2025-01-04 01:15:05
【ROS RIKIBOT基礎–使用系列】ROS機器人硬件介紹1.RIKIBOT機器人硬件介紹1.1硬件框架ROS機器人硬件 采用樹莓派和STM32驅動板組成雙系統通信框架,具體組成參考下圖:1.2
2021-07-30 06:59:38
目的開源設計。項目計劃1、移植opencv和機器人操作系統(ROS)到HarmonyOS中,逐漸優化成一個應用層框架2、將用于比賽中的視覺目標識別定位系統和slm系統,代替傳統使用x86pc系統,實現低
2020-10-29 14:20:47
到達指定位置、機器人定時巡邏、跟隨等等,于是有了機器人實時定位與導航。定位定位算法使用自適應的蒙特卡洛(AMCL),蒙特卡洛是一種經典的粒子濾波算法,它適應于局部定位和全局定位兩類問題,自適應解決了
2019-08-21 22:12:16
的知識,還需要對ROS 2的節點通信和數據處理有一定的了解。通過實踐這一部分內容,我掌握了如何在ROS 2中實現二維碼識別,這對于提高機器人的智能性和交互性具有重要意義。
地圖構建:SLAM技術
2025-04-27 11:42:22
應用案例:書中提供了多個機器人應用案例,幫助讀者將所學的 ROS 2 知識應用到實際的機器人項目中。例如,在自主移動機器人案例中,詳細講解了如何實現機器人的自主導航、避障、任務執行等功能,包括硬件選型
2025-04-27 11:24:32
的非常好的,特別是一些流程圖,很清晰的闡釋了概念
很適合作為初學者入門的引路書
還能了解很多技術和框架,破除初學者的自負困境,讓初學者知道功能是由很多開發者維護的,前人已經為各種產品搭建了完善的框架。避免陷入得一個人單打獨斗的錯覺
一直蠢蠢欲動ros2和機器人的同學,有了這本書就行動起來吧!
2025-04-30 01:05:09
:
一、機器人視覺:從理論到實踐
第7章詳細介紹了ROS2在機器視覺領域的應用,涵蓋了相機標定、OpenCV集成、視覺巡線、二維碼識別以及深度學習目標檢測等內容。通過學習,我認識到:
相機標定的重要性
2025-05-03 19:41:47
具身智能機器人的基礎模塊,這個是本書的第二部分內容,主要分為四個部分:機器人計算系統,自主機器人的感知系統,自主機器人的定位系統,自主機器人的規劃與控制系統。這些基礎模塊在自主機器人系統中占據了
2025-01-04 19:22:08
Tran***ot ROS教育機器人如果你熱衷于編程探索和DIY創作,恰好又在尋找一款可以讓你自由發揮,二次開發的ROS平臺,那么我們今天體驗的這款Tranbot ROS教育機器人將會非常適合你。對于這款機器人的裝箱清單,8個字形容:物資豐富,品質過硬。
2021-11-25 20:33:50
本帖最后由 mu0543 于 2021-11-25 20:23 編輯
如果你熱衷于編程探索和DIY創作,恰好又在尋找一款可以讓你自由發揮,二次開發的ROS平臺,那么我們今天體驗的這款Tranbot ROS教育機器人將會非常適合你。對于這款機器人的裝箱清單,8個字形容:物資豐富,品質過硬。
2021-11-25 20:13:59
項目名稱:基于機器視覺的工業機器人抓取工作站試用計劃:申請理由 本人是嘉興技師學院教師,浙江機器人有限公司技術顧問。在機器人領域有5年多的學習和開發經驗,曾設參與多項工業機器人工作站的開發與調試
2019-09-18 19:24:11
了進一步的發展和完善。近年來,國內外學者對自適應控制已做了卓越的研究工作,也取得了可喜的研究成果,有許多研究成果已經應用到生產實際中。
隨著科學技術的發展和社會的進步,機器人的應用越來越普及,不僅廣泛應用
2023-09-21 07:55:45
` 本帖最后由 大連云港 于 2015-1-19 11:02 編輯
工業機器人是面向工業領域的多關節機械手或多自由度的機器人。工業機器人是自動執行工作的機器裝置,是靠自身動力和控制能力來實現
2015-01-19 10:58:38
創龍TL5728-EasyEVM-A4開發板如何移植ros機器人操作系統?
2020-01-02 09:32:46
)。中斷向量可以保證在實時控制器命令生成和FPGA底層硬件通信之間的同步。而后,FPGA背板采用I2C協議控制12條總線,每條總線分別控制五個面板。從而,機器人所看到的環境決定了針對蒼蠅的視覺刺激,而蒼蠅對視
2019-04-30 09:40:04
機器人是先進的機電一體化數字化裝備,集機械、電子、控制、計算機、傳感器、人工智能等多學科高新技術于一體,技術附加值很高。對提高產品的質量與產量、保障人身安全,改善勞動環境,減輕勞動強度,提高勞動生產率
2015-09-02 14:03:18
的未來開辟了無限可能。
ROS 緣起
2007年,一群懷揣夢想的年輕人,正在斯坦福大學的機器人實驗室里進行一場頭腦風暴:如果可以開發一款硬件足夠強大的機器人,再搭配足夠好用的軟件系統,那么在此之上開發
2025-03-03 14:18:22
本實驗箱以大載重的全向麥輪車為載體,基于ROS系統作為開發平臺,使用雙驅和四驅兩種不同的結構作為機器人本體,最終通過地面二維碼實現導航機器人的精確方向和距離控制...
2021-09-03 07:29:36
基于結構自適應的多機器人協作機制研究
2012-08-20 13:43:51
,導航技術,計算機技術,人工智能等多個領域,因而對移動機器人的控制部分提出很高的要求,特別是視覺傳感器的出現,要求控制系統不僅存儲量大,而且處理速度快等。以往基于PLC和單片機控制的移動機器人就不能很好
2020-11-23 15:08:52
怎樣去實現ROS機器人的定位導航呢?如何對ROS機器人的定位導航進行仿真?
2021-12-23 09:22:45
目錄介紹一、底盤主控板二、嵌入式開發板1. 與上位機pc的關系2. 與STM32主控板的關系介紹自下而上的分析實體機器人(差分輪速機器人)搭建中的關鍵過程。一、底盤主控板本部分搭建實體機器人ros
2022-01-20 07:36:08
機器人技術是綜合了計算機、控制論、機構學、信息和傳感技術、人工智能、仿生學等多學科而形成的高新技術,是當代研究十分活躍,應用日益廣泛的領域。機器人應用情況,是一個國家工業自動化水平的重要標志。
2020-03-27 09:03:30
進行通訊。機器人控制器(RC)的主計算機完成機器人的運動規劃、插補和位置伺服以及主控邏輯、數字I/O、傳感器處理等功能,而編程示教盒完成信息的顯示和按鍵的輸入。 (2)模塊化層次化的控制器軟件系統
2018-11-23 10:40:38
的原理進行了嚴謹的闡述,并使用典型例題解釋原理。每章附不同難度值的習題,供讀者訓練,有利于加深讀者對機器人基本概念的理解。每章還設置有MATLAB編程作業,對于讀者提升機器人知識的應用能力大有幫助。2、ROS
2020-11-16 16:14:52
怎么實現六足機器人的設計?
2021-11-22 08:02:22
怎么實現對機甲大師機器人的控制?
2021-11-19 06:33:45
。兩家公司宣布,用于 RA MCU 的瑞薩電子 EK-RA6M5 評估套件是 micro-ROS 開發框架的官方支持硬件平臺。所述微ROS框架,作為業界機器人操作系統針對MCU,允許標準化集成的MCU到
2022-02-11 06:19:04
: 官方和社區對主流軟件(如Linux, ROS 2)的適配非常積極,降低了開發門檻。
3. 定位清晰: 精準定位于高性能RISC-V應用開發、AI和機器人領域,是學習和項目實踐的優秀平臺。
不足
2025-12-03 14:40:05
關于ros智能機器人,就是一個寫智能機器人代碼的一個虛擬機,
2021-10-13 19:20:16
起步較晚,隨著掃地機器人功能更完善,智能化程度更高,預計未來中國沿海發達地區掃地機器人滲透率水平會達到美國掃地機器人目前的滲透率水平。2.本文編寫目的本文主要介紹通過智能WiFi控制技術實現手機微信控制
2017-05-27 13:31:20
全網最實用的STM32和ROS機器人的串口通信方案小白學移動機器人同名公眾號:小白學移動機器人創作聲明:內容包含虛構創作內容中的情節存在虛構加工,僅供參考全網最實用的STM32和ROS機器人的串口
2021-08-20 06:33:28
跟蹤等領域。不同種類的機器人由于工作的重點不一樣,它的視覺系統在軟件或硬件上都有著細微的差別。本文研究基于服務機器人的單目視覺系統。它處理的是二維圖像,是基于對無遮擋物體顏色和形狀的識別以及3D目標物體的平動跟蹤。
2020-04-07 07:27:24
機甲大師機器人的軟件架構設計如何實現?
2021-11-22 07:55:21
。為探索多場景交互學習的可行方案,領先的移動機器人底盤和軟硬件系統提供商松靈機器人,借助多年的機器人硬件結構創新經驗和軟件算法開發優勢,為科研教育用戶開創了全球首款集四種運動模態和高性能傳感器系統于
2021-08-30 08:39:33
請問一下ROS機器人的硬件是由哪些部分組成的?分別有何功能?
2021-11-04 06:35:41
隨著人工智能技術的發展,機器人已經開始接管人類的部分工作,例如快遞、工廠作業、餐廳服務員甚至媒體編輯---紐約時報就聘請了一位機器人做總編。未來,機器人可以介入半導體設計開發嗎?例如,機器人可以進行FPGA開發嗎?
2019-10-10 06:33:18
菜鳥想要學習ROS機器人操作系統,但是沒能找到系統的資料,請問有哪位大神研究過,可以分享一些資料嗎?跪謝了!!!!!!!!!
2019-02-19 23:14:23
應用于新的領域,且不必重復實現。3, 快速測試 為機器人開發軟件比其他軟件開發更具挑戰性,主要是因為調試準備時間長,且調試過程復雜。況且,因為硬件維修、經費有限等因素,不一定隨時有機器人可供使用
2017-06-09 17:18:49
://emanual.robotis.com/docs/en/platform/turtlebot3/overview/1.先了解turtlebot3機器人的配置順序(1)配置調試用的遠程電腦端,安裝Linux系統、ROS系統
2018-06-08 15:27:18
實現軟件定義無線電和認知無線電的自適應特性
FPGA對自適應性的支持得益于FPGA的處理能力,作為今天SDR和CR的處理平臺,FPGA具備很大的價值。
2010-03-05 10:51:06 26
26 機器人,適用于物料搬運、點焊、弧焊、切割、裝配、測試、檢測、涂膠、研磨和拋光等多種應用。這些機器人具有靈活的工作范圍和強大的負載能力,能夠適應各種復雜的生產環境。?協
2024-09-30 17:56:07
要讓機器人實現環境感知、機械臂控制、導航規劃等一系列功能,就需要操作系統的支持,而ROS就是最重要的軟件平臺之一,它在科研領域已經有廣泛的應用。
2016-12-13 14:12:472773 基于ELM的機器人自適應跟蹤控制_李軍
2017-01-08 11:37:440 ROS 是 Robot Operating System 的縮寫,原本是斯坦福大學的一個機器人項目,后 來由 WillowGarage 公司發展,目前由 OSRF(Open Source
2017-09-13 17:23:2314 Operating System 的縮寫,原本是斯坦福大學的一個機器人項目,后來由 WillowGarage 公司發展,目前由 OSRF(Open Source Robotics Foundation,Inc)公司維護的開源項目。 1、首先是一個操作系統 根據 wikipedia 定義,操作系統是用來管理計算機硬件
2017-09-26 14:08:2812 (Adaptive Compute Acceleration Platform,自適應計算加速平臺)。ACAP 是一個高度集成的多核異構計算平臺,能根據各種應用與工作負載的需求從硬件層對其進行靈活修改。
2018-03-20 10:21:238427 的增長。機器人領域之所以快速增長,有一部分原因是得益于開源開發和機器人操作系統ROS或ROS2的發展。
2018-10-18 09:24:312229 教育機器人涵蓋計算機科學、教育、自動控制、機電、人工智能等領域。它們是機器人在教育中應用的典型案例,旨在培養學生分析、設計、實踐和創造的綜合能力。本文首先介紹了國內外教育機器人的研究現狀和技術發展
2018-11-06 14:48:2310 機器人操作系統ROS詳細介紹 ROS( 機器人 操作系統,RobotOperatingSystem),是專為機器人軟件開發所設計出來的一套電腦操作系統架構。它是一個開源的元級操作系統(后操作系統
2018-11-18 18:09:013375 教育機器人涵蓋計算機科學、教育學、自動控制、機械電子、人工智能等領域,是機器人應用于教育領域的典型案例,以培養學生具備分析、設計、實踐和創造等綜合能力為目標。本文首先介紹國內外教育機器人現狀和技術
2018-12-20 11:22:5623 應用自適應機械臂能夠帶來簡化安裝調試流程、減少停產時間、降低人力成本、精簡生產線、去除冗余的額外設備等優勢,從而為企業產生可觀的價值。與傳統機器人方案相比,自適應機器人方案擁有高品質下極高的性價比。
2019-04-12 13:30:597429 Rizon是世界上第一個自適應機器人,結合了前沿的力覺控制及AI技術,為最終在制造業、醫療、零售等多個領域通過機器人完成復雜工作任務而奠定重要基礎。
2019-04-17 10:53:434718 XACC 將配備賽靈思面向自適應計算加速而量身定制的最新硬件與軟件技術。每個集群都經過專門配置,確保全球一流的學術團隊開展最前沿的 HPC 研究。
2020-05-07 16:14:121331 自適應和智能計算的全球領先企業賽靈思公司宣布其正在全球四所最負盛名的高等學府設立“賽靈思?自適應計算集群”。
2020-05-08 11:11:473586 通過對家政服務環境以及機器人需要完成的任務進行分析,融合機器視覺和深度學習技術設計了一種家政服務機器人視覺導航識別算法。該算法基于you Bot機器人硬件平臺和ROS(Robot Operating
2020-08-14 15:54:0018 可重構計算技術和自適應系統作為最有前途的微處理器體系結構之一引起了人們的極大興趣。可重構系統的起源,也被稱為可編程邏輯器件或現場可編程門陣列(fpga),已經演變成今天復雜的片上系統fpga、動態可重構fpga,以及各自適應計算設備。
2021-03-28 09:40:585 針對復雜環境下移動機器人自主導航易被困、路徑規劃不理想等問題。首先,通過改進機器人操作系統(robo‘φperating syste,ROS)中代價地圖代價值衰減函數和七宮格檢測法,研究了代價地圖
2021-06-01 11:08:086 隨著機器人能夠適應不斷改變的環境,它們的價值和潛在影響也在迅速攀升。
2021-08-20 14:19:451961 以前設計一個產品,先要規劃好硬件架構,等硬件設計全部完成后,才會開始軟件部分的開發,然后才是完整產品的發布。現在,隨著云計算、互聯網的發展,以及AI、5G和自動駕駛的興起,硬件和產品的開發流程需求在
2021-09-03 11:20:472919 賽靈思2021自適應計算挑戰賽自9月7日正式開賽以來,收到了來自全球各地區的FPGA軟硬件開發者們的積極關注以及踴躍報名!通過挑戰賽我們希望開發者能運用 Vivado 設計套件、Vitis 開發環境
2021-10-27 17:16:364644 傳統的機器人軟件編程是在預定義的架構和約束條件下,在給定機器人的 CPU 中進行功能編程。
2021-11-11 15:33:223891 
電子發燒友網報道(文/李寧遠)對于熟悉機器人應用的讀者,ROS想必定是不會陌生的。ROS可以說是目前機器人相關開源社區最流行的項目。每一種類型的機器人都需要以硬件的實際情況編寫符合用戶需要的功能,起初代碼的復用率很低,大大阻礙了機器人的發展。
2022-04-08 08:13:595500 當您將 FPGA 的自適應計算加速與低延遲連接相結合時,您可以在可組合數據中心更進一步。您可以將計算繁重的工作負載分配給通過適應性強的智能結構互連的加速器集群——按需創建高性能計算機。
2022-06-03 11:14:001627 )硬件加速框架——ROBOTCORE?。ROS是機器人技術的標準。該公司為機器人提供半導體構建模塊,通過硬件加速為高性能機器人創建定制計算架構,同時保持機器人和加速器的硬件無關性(支持流行的FPGA和GPU)。 ROBOTCORE?可幫助機器人工程師創建與ROS和ROS 2 API兼容的知識產權(IP)核心,以提高包括
2022-06-16 12:40:202854 機器人是一種復合系統,它由感知周邊環境的傳感器、根據感知采取行動的致動器和負責處理數據的計算構成,從而對其應用做出連貫一致的響應。在很大程度上,機器人技術是一種系統集成的藝術,在軟件和硬件方面皆是如此。
2022-08-01 08:09:471240 
這個項目旨在創建一個基于運行ROS的機器人,它允許我們把任何通用的機器人硬件平臺變成智能機器人。
2022-12-02 14:59:372 這個項目旨在創建一個基于運行ROS的機器人,它允許我們把任何通用的機器人硬件平臺變成智能機器人。
2022-12-05 17:24:301 項目,從感知到控制、從定位到構圖、從導航到可視化,都使用ROS作為基礎。 而不久前AMD XILINX推出了以ROS2為中心的增強機器人自適應計算能力的硬件加速方法——Kria Robotics Stack(KRS),通過硬件加速為機器人帶來自適應計算能力。 從ROS到ROS
2022-12-12 07:10:061560 的micro-ROS解決方案 。micro-ROS是一個使用ROS 2的機器人控制系統的開源項目,ROS 2是第二代ROS(機器人操作系統),用于微控制器上的各種機器人系統。 在本篇文章中,您將了解用于微型ROS實現工業機器手的最佳硬件和軟件平臺,這些平臺可以使用
2023-05-18 23:15:021550 本文介紹機器人激光跟蹤自適應焊接技術,激光跟蹤自適應擺動焊接不但可以用于實時跟蹤焊縫,避免焊偏,還能根據母材之間的間隙大小自動變換焊接參數,從而使焊縫始終能獲得相等的焊縫高度。激光跟蹤機器人自適應
2022-02-14 17:15:421739 
電子發燒友網站提供《機器人中的自適應計算.pdf》資料免費下載
2023-09-14 09:49:050 電子發燒友網站提供《Versal:首款自適應計算加速平臺(ACAP).pdf》資料免費下載
2023-09-18 09:28:171 近日,AMD 自適應計算峰會(AMD Adaptive Computing Summit, 即 AMD ACS)在深圳舉行,聚焦 AMD 自適應 SoC 和 FPGA 產品最新動態,以及設計工具和開發環境的前沿技巧,是全球硬件開發者和工程師們深入交流與學習的優質平臺。
2024-08-02 14:36:591385
 電子發燒友App
電子發燒友App








 工商網監
工商網監
評論