") 機器人|激光跟蹤自適應(yīng)焊接技術(shù)
機器人|激光跟蹤自適應(yīng)焊接技術(shù)

本文介紹機器人激光跟蹤自適應(yīng)焊接技術(shù),激光跟蹤自適應(yīng)擺動焊接不但可以用于實時跟蹤焊縫,避免焊偏,還能根據(jù)母材之間的間隙大小自動變換焊接參數(shù),從而使焊縫始終能獲得相等的焊縫高度。
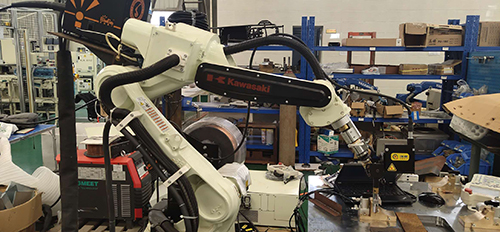
激光跟蹤機器人自適應(yīng)焊接系統(tǒng)主要由:機器人、操作裝置(機器人示教盒)、探測頭(激光器)、探測頭處理器(激光器控制器)、計算機5大部分組成:
機器人:系統(tǒng)中主要焊接設(shè)備,焊槍與激光器都安裝在機器人上,由機器人“拿著”焊槍在工件上焊接;
?
操作裝置(機器人示教盒):用于編輯機器人的焊接程序;
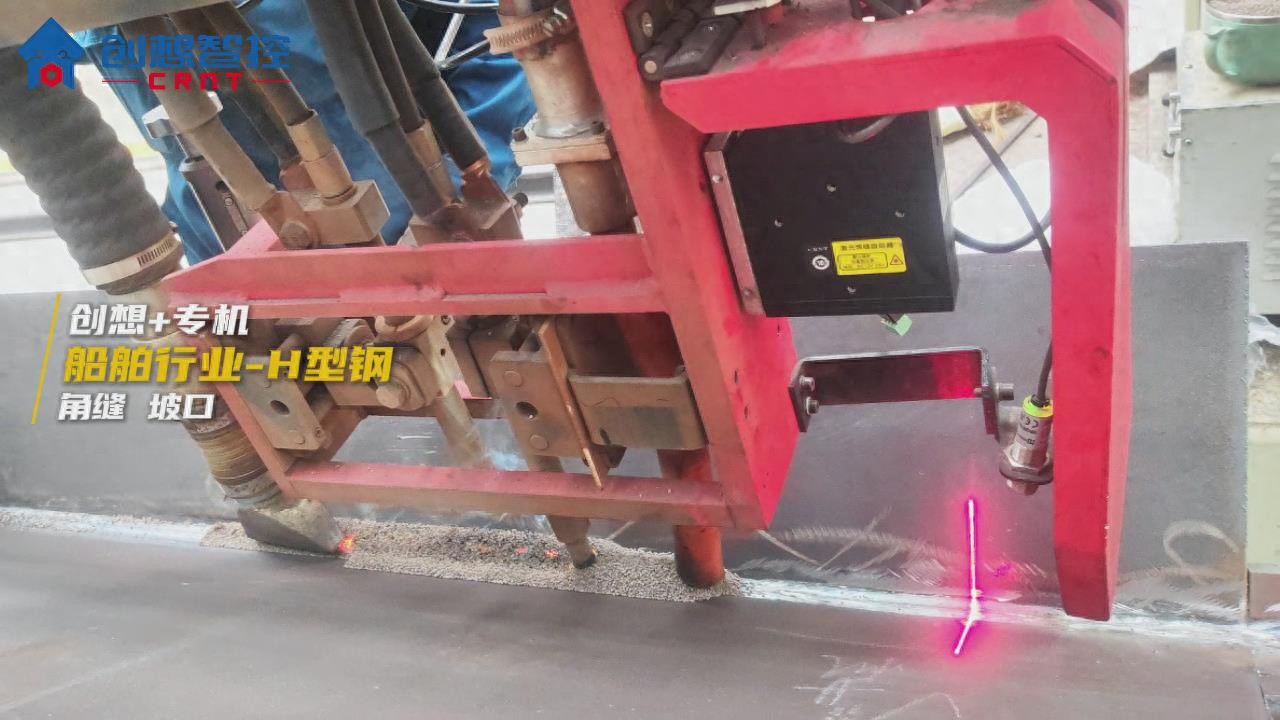
探測頭(激光器):安裝于機器人上,用于識別焊縫位置,母材間間隙大小;
探測頭處理器(激光器控制器):將激光器傳回的焊縫位置數(shù)據(jù)處理后輸送給機器人。機器人根據(jù)焊縫位置數(shù)據(jù)來進行焊接;
計算機:用于設(shè)定工件的尺寸及坡口類型,也可以實時的查看當前的跟蹤信息
原理簡介
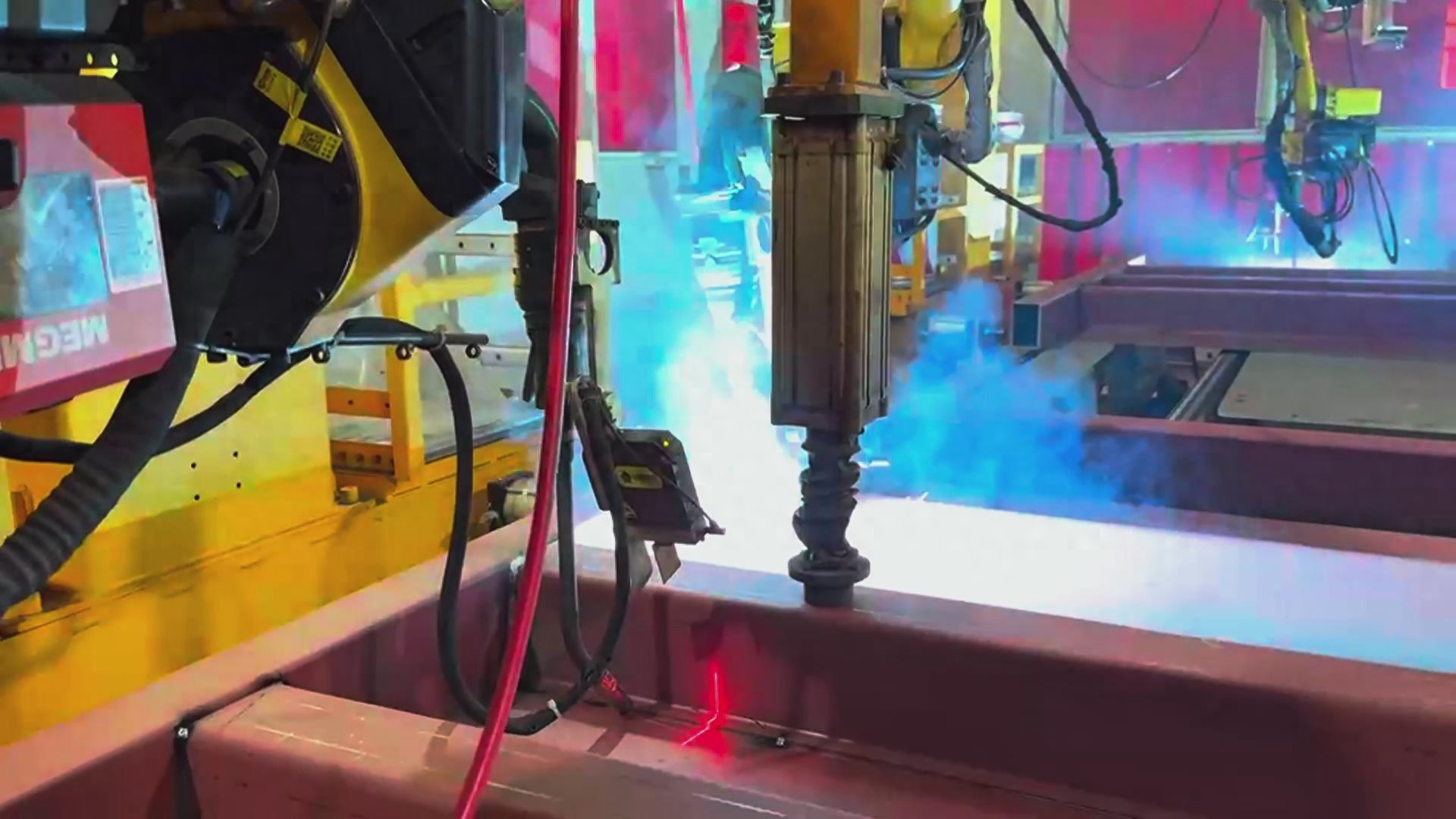
激光視覺傳感器通過激光條紋掃面焊縫,獲取焊縫的截面積、焊縫的間隙以及焊縫的左右錯邊高度等參數(shù),配備先進的機器人接口,將數(shù)據(jù)傳輸給機器人,機器人能夠根據(jù)激光跟蹤視覺傳感器掃描焊縫的截面參數(shù)來實時調(diào)整焊接擺幅、擺動頻率、擺動左右停留時間、焊接速度、焊接電流電壓,實現(xiàn)高速高質(zhì)量的自適應(yīng)焊接。
傳感器特點
非接觸式激光視覺系統(tǒng),幫助機器人精準定位焊縫,簡化焊接機器人應(yīng)用;
自適應(yīng)焊接功能用于調(diào)整焊接參數(shù),補償焊縫裝配變化;
自適應(yīng)焊接模塊,應(yīng)對接頭集合尺寸變化,優(yōu)化焊縫尺寸,從而消除焊接缺陷和減少過量焊接;
成熟可靠的光學(xué)和傳感控制技術(shù),適用機加工表面及不銹鋼工件;
在工件裝配有誤差時確保焊槍位置準確,實現(xiàn)完美焊接;
幫助降低工裝夾具復(fù)雜性及成本;
先進機器人接口實現(xiàn)高速焊縫跟蹤
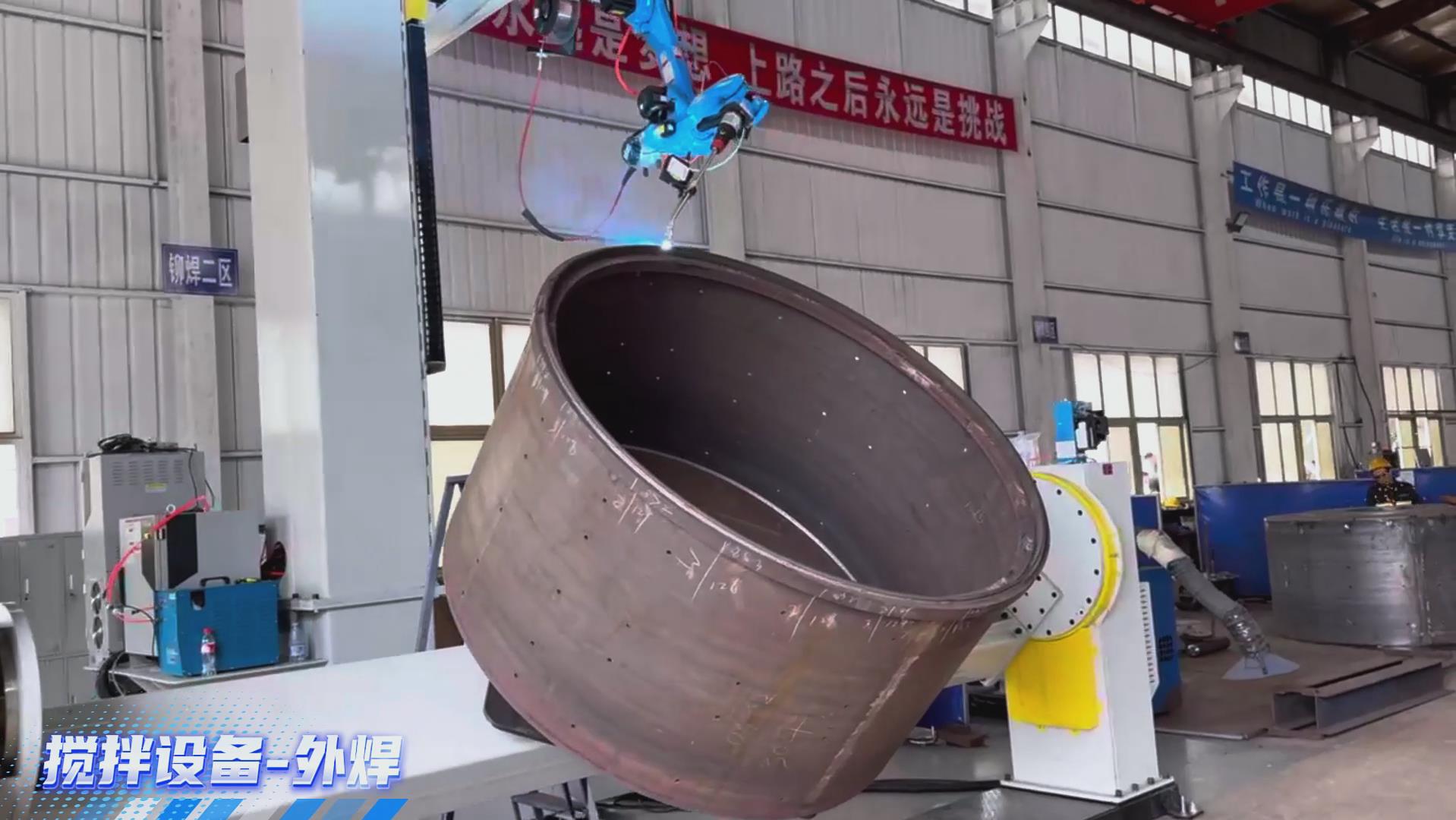
機器人激光跟蹤自適應(yīng)焊接可以避免由于工件尺寸偏差造成的焊縫不飽滿或者過于飽滿,可以廣泛運用于各行各業(yè),一定程度上降低機器人對工件加工精度和裝配精度的依賴,使整個焊接過程更加智能化與柔性化。
-
焊縫跟蹤
+關(guān)注
關(guān)注
0文章
210瀏覽量
11064
發(fā)布評論請先 登錄
高精度機器人控制的核心——基于 MYD-LT536 開發(fā)板的精密運動控制方案
材質(zhì)識別MEMS超聲波傳感器賦能雙足機器人自適應(yīng)行走

卡諾普機器人搭載創(chuàng)想焊縫跟蹤系統(tǒng),實現(xiàn)攪拌設(shè)備焊接智能化升級
創(chuàng)想智控焊縫跟蹤系統(tǒng)攜手廣數(shù)機器人實現(xiàn)農(nóng)機齒輪焊接智能化升級
工業(yè)機器人的特點
創(chuàng)想智控激光焊縫跟蹤系統(tǒng)在發(fā)那科機器人智能焊接火車端墻的應(yīng)用
創(chuàng)想智控激光焊縫跟蹤適配安川機器人雙機協(xié)同自動焊接變壓器油箱

盤點#機器人開發(fā)平臺
詳細介紹機場智能指路機器人的工作原理
【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】視覺實現(xiàn)的基礎(chǔ)算法的應(yīng)用
【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】+內(nèi)容初識
船舶焊接自動化升級:激光焊縫跟蹤傳感器解決方案



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論