 電子發(fā)燒友App
電子發(fā)燒友App



工業(yè)自動化的下一次發(fā)展需要機(jī)器獨立調(diào)整其性能參數(shù)以完成工廠操作員分配的任務(wù),或根據(jù)生產(chǎn)力增強(qiáng)的人工智能觀察算法的輸入重新配置自身以優(yōu)化其行為。具有自我意識的機(jī)器的價值在于它能夠最大限度地提高生產(chǎn)力、延長設(shè)備的使用壽命并降低維護(hù)成本。?
自我感知運動控制之旅
自我意識描述了一個基于對其能力和系統(tǒng)性能目標(biāo)的理解而具有自身知識的系統(tǒng)。事實上,自我感知運動控制系統(tǒng)需要實施多個控制回路,這些控制回路解釋傳感器輸入和所需系統(tǒng)參數(shù),并提供將其自身操作行為與所需系統(tǒng)性能進(jìn)行比較的能力。為了實現(xiàn)這些目標(biāo)并創(chuàng)建具有自我意識的運動控制系統(tǒng),我們需要創(chuàng)建一個自適應(yīng)運動控制代理來監(jiān)控系統(tǒng)的動作并根據(jù)驅(qū)動系統(tǒng)的工作環(huán)境動態(tài)調(diào)整其性能。?
我們在本文中的重點是提供一種通過使用自主代理來檢測和監(jiān)控不斷變化的工作環(huán)境條件來實現(xiàn)自我感知運動控制系統(tǒng)的方法。這些條件源自一系列嵌套閉環(huán)實時性能模型,這些模型從現(xiàn)場級驅(qū)動器中獲取運動參數(shù)。導(dǎo)出驅(qū)動系統(tǒng)的電氣和機(jī)械模型后,該模型將用于比較和調(diào)整自動化金字塔的監(jiān)督、規(guī)劃或管理級別所要求的所需系統(tǒng)性能(圖 1)。當(dāng)從自動化金字塔的監(jiān)督部分之上的任何級別請求新的所需系統(tǒng)性能時,一組新的控制參數(shù)被傳輸?shù)竭\動控制系統(tǒng)的自適應(yīng)控制部分。然后系統(tǒng)通過調(diào)整其性能以匹配新的性能請求來響應(yīng)。?
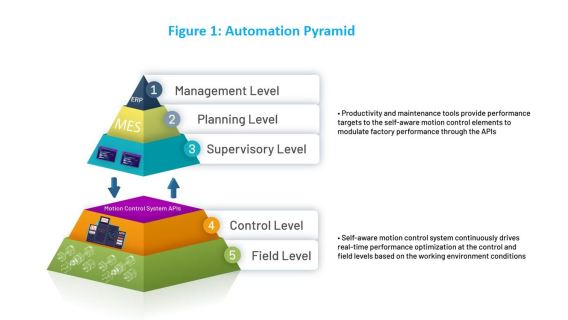
圖 1:自動化金字塔?
實現(xiàn)自我感知運動控制系統(tǒng)的兩個主要好處是能夠?qū)崟r自我調(diào)節(jié)和最大限度地提高運動控制系統(tǒng)的性能。這種新功能為自動化金字塔的監(jiān)督、規(guī)劃和管理級別提供了通過提高生產(chǎn)力來調(diào)節(jié)自我感知運動控制系統(tǒng)的機(jī)會。此外,支持 AI 的軟件算法可用于調(diào)節(jié)系統(tǒng)性能,以實現(xiàn)更好的工廠范圍內(nèi)的結(jié)果。?
讓我們檢查一個自我感知運動控制概念圖,以更好地理解實現(xiàn)自我感知運動控制系統(tǒng)所需的四個基本要素。?
自我感知運動控制概念圖
為了實現(xiàn)這一級別的自我感知運動控制,我們需要開發(fā)一個控制系統(tǒng)圖。圖 2展示了成功實施自我感知運動控制所需的四個關(guān)鍵要素。?
要素 I:目標(biāo)或任務(wù)?
需要為系統(tǒng)建立明確的目標(biāo)或任務(wù)才能實現(xiàn)。在本文后面描述的示例中,這意味著以最佳方式將啤酒杯從 A 點移動到 B 點,以免灑出任何啤酒。?
要素 II:期望的系統(tǒng)行為?
一旦建立了這個目標(biāo),下一層自我感知運動控制圖就會啟動所需的運動行為。對于我們的啤酒杯示例,這將使用線性運動來移動啤酒杯,同時自動調(diào)整其運動以在機(jī)械系統(tǒng)所需的控制安全限制范圍內(nèi)補(bǔ)償啤酒杯的不同重量和尺寸。?
一旦建立了目標(biāo)和所需的系統(tǒng)行為,自適應(yīng)控制引擎就會通過自動調(diào)整運動控制驅(qū)動器及其集成機(jī)械系統(tǒng)來動態(tài)驅(qū)動核心驅(qū)動系統(tǒng)運動學(xué)與其配套機(jī)械系統(tǒng)之間的收斂,從而在其獨特的工作中運行時實現(xiàn)峰值運行性能環(huán)境。?
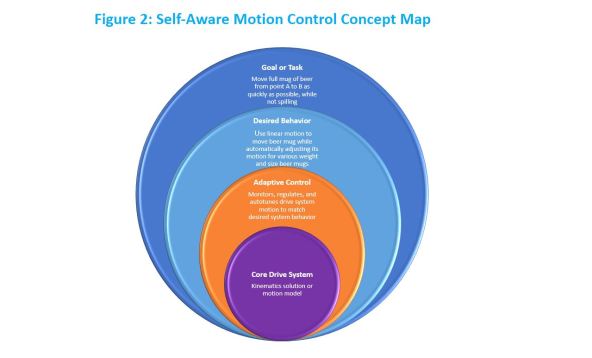
圖 2:自我感知運動控制概念圖?
要素三:核心驅(qū)動系統(tǒng)?
自我感知運動控制系統(tǒng)的核心是其運動學(xué)。挑戰(zhàn)在于觀察、學(xué)習(xí)和監(jiān)控電機(jī)和驅(qū)動系統(tǒng)的性能。要創(chuàng)建驅(qū)動系統(tǒng)的工作模型,需要實施智能觀察器,以從根本上了解其運動參數(shù)及其物理極限。這是通過帶有專用位置傳感器的磁場定向控制器 (FOC) 或無傳感器 FOC 方法來實現(xiàn)的,以了解電機(jī)在其運行環(huán)境中如何受到壓力和反應(yīng)。通過監(jiān)控和自動調(diào)整來自電機(jī)轉(zhuǎn)矩-磁通電流環(huán)、速度環(huán)和定位環(huán)的控制參數(shù)值,我們可以優(yōu)化驅(qū)動系統(tǒng)響應(yīng)。一旦這些信息數(shù)據(jù)報被收集并輸入智能觀察者,圖 3)。既然創(chuàng)建了間接運動模型來對驅(qū)動系統(tǒng)的運動進(jìn)行建模和優(yōu)化,我們就可以通過引入自適應(yīng)控制引擎來實現(xiàn)下一級的自我感知運動控制解決方案。?
該視頻提供了 Trinamic(現(xiàn)為 Analog Devices 的一部分)的自動調(diào)諧工具示例,用于實現(xiàn)優(yōu)化的運動控制值。?
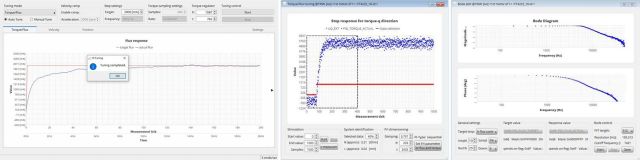
圖 3:轉(zhuǎn)矩-磁通電流、速度和位置環(huán)的監(jiān)控和自動調(diào)整??
要素四:自適應(yīng)控制?
基于我們系統(tǒng)的運動學(xué)和 FOC 自動調(diào)整功能,我們現(xiàn)在可以專注于實現(xiàn)自我感知運動控制的下一個級別,即自適應(yīng)控制引擎。下一級智能運動側(cè)重于將所需的系統(tǒng)行為傳達(dá)給自適應(yīng)控制引擎(圖 4)。該系統(tǒng)行為由生產(chǎn)員工或工廠主管提供,或者由 AI 生產(chǎn)力算法生成,該算法通過其智能傳感器網(wǎng)絡(luò)收集工廠數(shù)據(jù)。一旦期望的行為被傳遞到自適應(yīng)控制引擎,自我感知運動控制系統(tǒng)開始動態(tài)地重新配置驅(qū)動系統(tǒng)的操作參數(shù)以匹配期望的系統(tǒng)行為。這些期望行為的一些示例是要求增加工廠吞吐量或通過在安全模式下運行來延長電機(jī)的使用壽命。隨著運動控制系統(tǒng)自動調(diào)整其運動控制參數(shù)以達(dá)到要求的新性能水平,自適應(yīng)控制系統(tǒng)持續(xù)監(jiān)控閉環(huán)系統(tǒng)以保持其所需的性能水平。即使驅(qū)動系統(tǒng)由于其機(jī)械系統(tǒng)的磨損或遇到電機(jī)工作環(huán)境的變化而發(fā)生變化,這種狀態(tài)也會保持不變。現(xiàn)在,該系統(tǒng)已經(jīng)達(dá)到了自我感知運動控制的極致。?
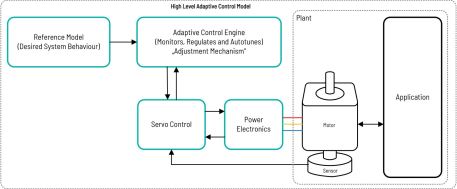
圖 4:自適應(yīng)控制模型?
演示此概念的最佳方式可能是使用真實示例(圖 5)。這個例子適用于所有喜歡確保他們的泡沫啤酒杯可以從調(diào)酒師運送到整個酒吧長度而不會在此過程中溢出一滴啤酒的啤酒愛好者。讓我們來看看這個例子是如何與實現(xiàn)一個自我感知運動控制系統(tǒng)相關(guān)的。此任務(wù)的目標(biāo)是在盡可能快的時間內(nèi)將啤酒從調(diào)酒師(A 點)送到坐在吧臺長度上的顧客(B 點),而不會濺出一滴啤酒。在這種情況下,工廠系統(tǒng)是一個帶有內(nèi)置重量檢測器的杯架,用于檢測各種尺寸啤酒杯的重量,并使用線性電機(jī)將其移動到整個酒吧的長度上。?
讓我們想想這個例子:一個自我感知的運動控制系統(tǒng)有利于在盡可能快的時間內(nèi)將啤酒送到顧客手中,但如果顧客將空或半空的啤酒杯放回原位,它也會自動調(diào)整其速度和性能杯架將啤酒杯送回調(diào)酒師進(jìn)行補(bǔ)充或丟棄。如果調(diào)酒師使用不同尺寸的玻璃杯和要交付給顧客的其他類型的飲料,該系統(tǒng)也可用于調(diào)整其性能。?
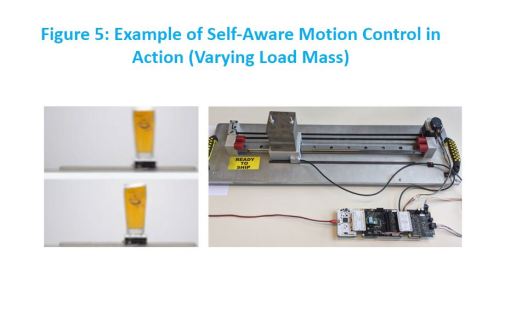
圖 5:動作中的自我感知運動控制示例(變化的負(fù)載質(zhì)量)?
雖然這聽起來像是科幻小說,但自我感知運動控制技術(shù)的發(fā)展正在為首次亮相進(jìn)行微調(diào)。可以想象一個基于使用自我感知電機(jī)和智能傳感器的設(shè)備的整個工廠。這家革命性的工廠將擁有先進(jìn)的能力來自我糾正潛在的設(shè)備故障,自動調(diào)整生產(chǎn)流程以最大限度地提高生產(chǎn)力,并延長整個工廠車間設(shè)備的使用壽命。歡迎來到自我感知運動控制和下一次工業(yè)革命的激動人心的新世界。?
審核編輯 黃昊宇












































 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論