 睿擎EtherCAT多軸控制技術:如何實現低抖動高精度運動控制 | 深度解析
睿擎EtherCAT多軸控制技術:如何實現低抖動高精度運動控制 | 深度解析

在工業自動化領域,運動控制的精度和穩定性直接決定了生產效率和產品質量。近日,睿擎SDK V1.5.0版本重磅發布,其中EtherCAT多軸控制技術的升級尤為引人注目。今天,我們就來深入解析這項技術是如何實現低抖動、高精度的多軸協同控制的。
一、EtherCAT技術:工業自動化的高速通信引擎
EtherCAT(Ethernet Control Automation Technology)作為一種高性能工業以太網技術,其最大特點在于突破了傳統以太網的通信限制。與普通以太網節點需要接收、處理、轉發三個步驟不同,EtherCAT采用了"即時處理"機制——當數據包經過每個節點時,設備會立即讀取屬于自己的數據,并將需要發送的數據插入到報文中,整個過程僅需幾納秒的延遲。
這種高效的通信方式使EtherCAT具備了以下顯著優勢:
●高速通信:使用100Mbit/s或1Gbit/s以太網速度,有效數據率可達90%以上
●微秒級延遲:通信延遲通常在微秒級別,1000個I/O的更新時間僅需30us左右
●靈活拓撲:支持線型、樹型、星型等多種拓撲結構
二、睿擎1.5.0版本的EtherCAT技術突破
1. DC補償功能:解決多軸抖動難題
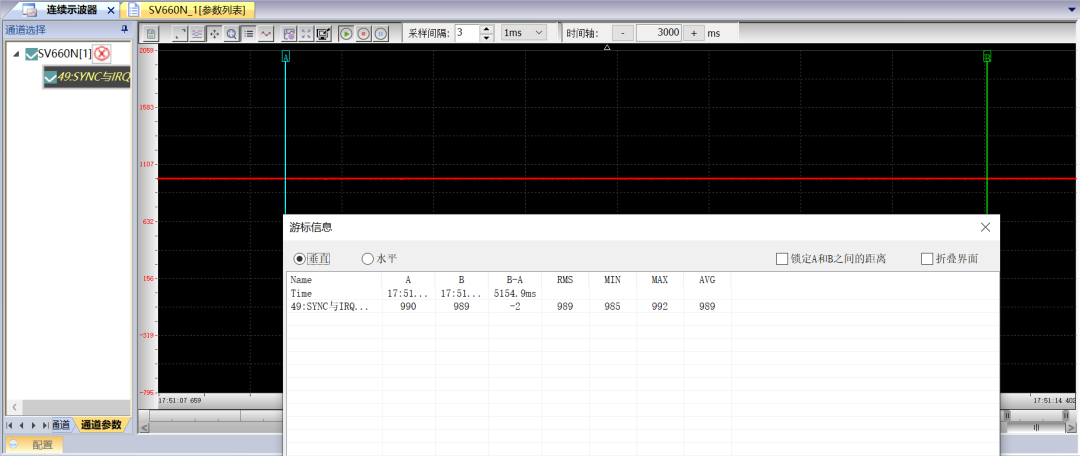
分布式時鐘同步是EtherCAT實現高精度多軸控制的關鍵技術,但在實際應用中,由于硬件差異和環境因素,同步精度往往會受到影響。睿擎派1.5.0版本新增了DC自動補償功能,能夠實時監測和補償各節點間的時間偏差。
技術亮點:在250us控制周期下,抖動穩定控制在±5us以內,這意味著多軸協同運動時,各軸的動作偏差被嚴格控制在微秒級別,極大提高了運動控制的精度和穩定性。
2. 多模式電機控制:滿足不同應用場景
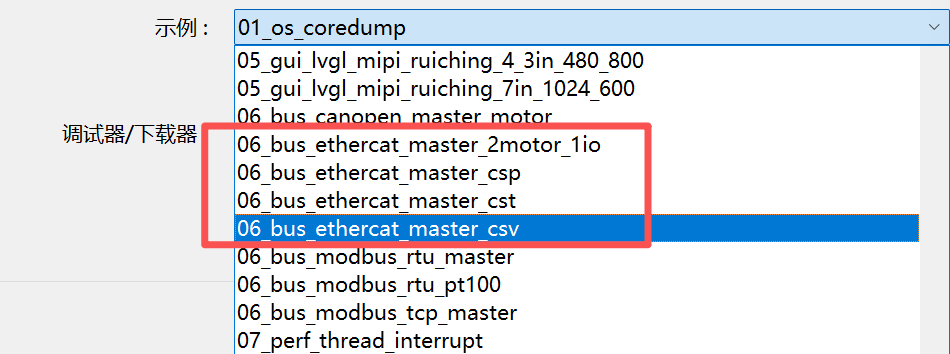
新版本提供了豐富的EtherCAT主站示例,包括CSP(周期同步位置模式)、CST(周期同步轉矩模式)和CSV(周期同步速度模式)等多種控制模式,滿足不同的運動控制需求:
模式名稱 | 模式值(hex) | 應用場景 |
周期同步位置模式 | 0x8 | 精確位置控制,適用于定位應用 |
周期同步速度模式 | 0x9 | 穩定速度控制,適用于轉速調節 |
周期同步轉矩模式 | 0xA | 精確力矩控制,適用于力控場景 |
3. 多電機示例:簡化多軸系統開發
1.5.0版本特別新增了多電機控制示例,為開發者提供了完整的多軸協同控制解決方案。該示例通過EtherCAT主站同時控制兩個伺服電機,實現了復雜的多軸運動控制邏輯。可以通過修改例程,添加更多電機控制。
三、技術實現:EtherCAT多軸控制系統的核心流程
下面我們來看看睿擎派上EtherCAT多軸控制系統的實現流程:
1. DC補償功能:解決多軸抖動難題
EtherCAT主站初始化是整個系統的基礎,主要包括以下步驟:
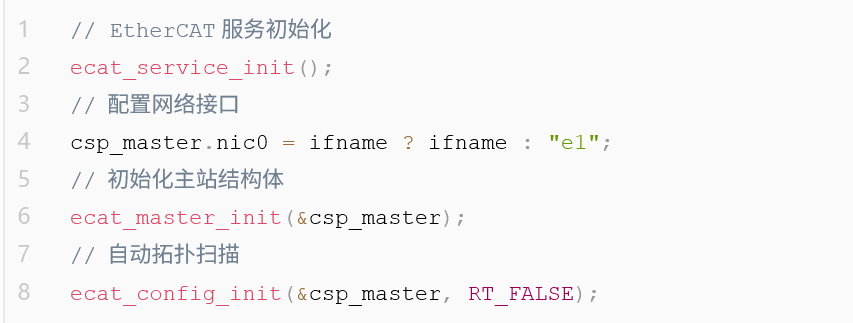
這段代碼完成了EtherCAT主站服務的初始化、網絡接口配置、主站結構體初始化和自動拓撲掃描,為后續的通信建立基礎。
2. DC同步配置
DC同步是實現多軸協同控制的關鍵,通過以下代碼配置分布式時鐘同步:

這一步驟確保了所有從站設備的時鐘精確同步,為后續的實時控制提供了時間基準。
1. DC補償功能:解決多軸抖動難題
EtherCAT通信遵循嚴格的狀態機轉換流程,從INIT→PREOP→SAFEOP→OP逐步切換,確保通信穩定可靠:
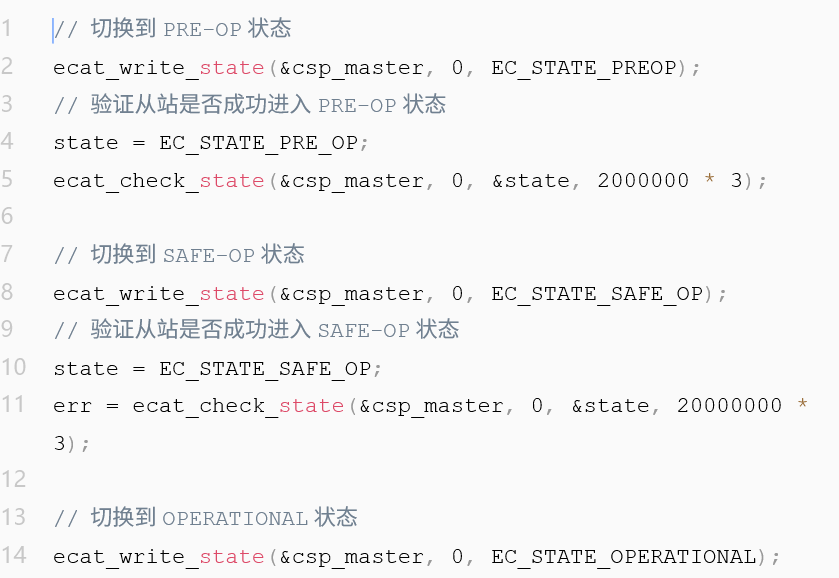
每個狀態轉換都有嚴格的驗證機制,確保所有設備都能正確響應并進入目標狀態。
4. 實時控制循環
在進入OPERATIONAL狀態后,系統進入實時控制循環,實現電機的精確控制:
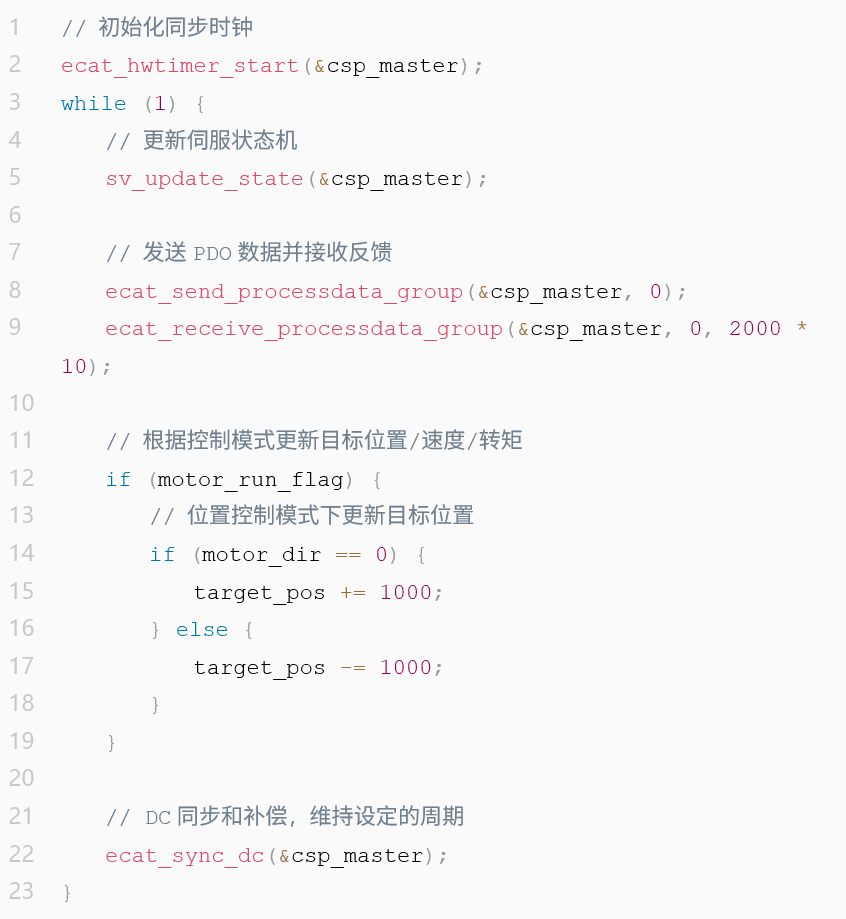
這個實時控制循環實現了數據的周期性更新和發送,配合DC同步機制,確保了控制指令的精確執行。
四、實際應用:如何在睿擎派上開發EtherCAT多軸控制系統
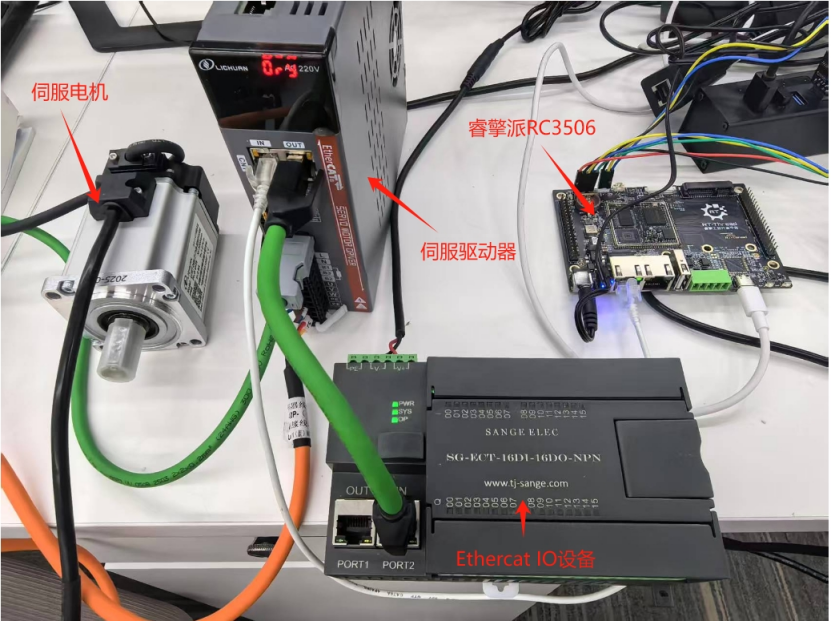
1. 硬件準備
開發EtherCAT多軸控制系統需要以下硬件:
●睿擎派RC3506工業開發板
●EtherCAT伺服驅動器(推薦匯川SV660N或LICHUAN-LC10E)
●伺服電機
●網線、電源線等連接線材
2. 硬件連接
將伺服控制器IN口與開發板ETH1網口連接,伺服電機的電源線和編碼器線分別接入相應接口。如果需要連接多個電機,按照菊花鏈方式連接各個伺服控制器。
3. 開發流程
在RuiChing Studio IDE中,創建EtherCAT示例工程,根據實際需求選擇合適的控制模式(CSP/CSV/CST)。主要開發步驟包括:
1.創建示例工程(如06_bus_ethercat_master_csp)
2.根據實際硬件配置修改網絡接口和從站參數
3.編譯并下載程序到開發板
4.通過命令行控制電機運行
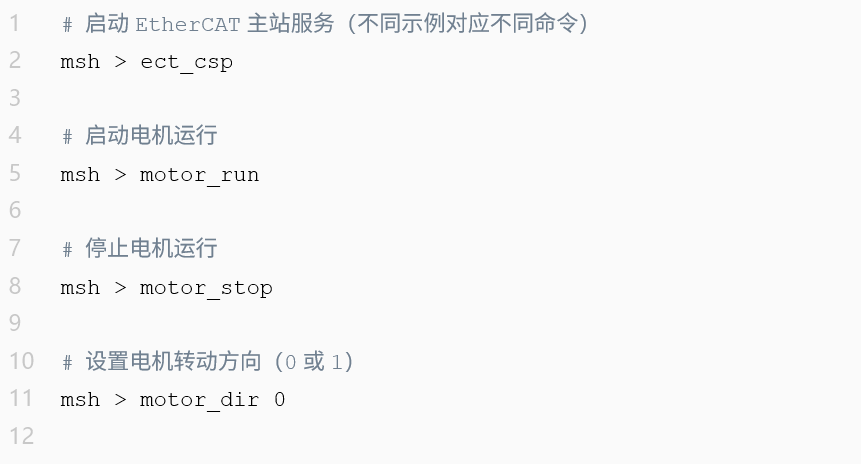
4. 常用控制命令
睿擎派提供了簡單易用的命令行接口,方便開發者控制和調試:
五、工業應用案例
睿擎派的EtherCAT多軸控制技術已經在多個工業場景中得到應用:
1. 自動化生產線
在自動化生產線上,多個伺服電機需要精確協同工作,完成復雜的裝配、搬運等任務。睿擎派的EtherCAT多軸控制技術能夠確保各軸之間的精確同步,提高生產效率和產品質量
2. 機器人控制系統
工業機器人通常需要多個關節協同運動,對控制精度和實時性要求極高。睿擎派的低抖動EtherCAT解決方案為機器人控制系統提供了可靠的通信基礎。
3. 精密加工設備
在CNC機床、激光加工等精密設備中,多軸協同控制的精度直接影響加工質量。睿擎派的EtherCAT技術能夠提供微秒級的控制精度,滿足高端制造需求。
六、總結與展望
睿擎SDK V1.5.0版本的EtherCAT多軸控制技術,通過DC補償功能、多模式控制和豐富的示例,為工業自動化領域提供了一套完整、高效的解決方案。特別是在多軸協同控制場景下,±5us的抖動控制能力,極大地提升了系統的控制精度和穩定性。
隨著工業4.0的深入發展,對運動控制的要求將越來越高。睿擎平臺將繼續優化和完善EtherCAT技術,為開發者提供更加強大、易用的工具和解決方案,助力工業自動化的創新與發展。
本文所詳述的EtherCAT多軸控制技術、±5us的抖動精度以及豐富的控制模式,均已在我們官方的睿擎派RC3506開發套件上經過嚴格驗證。
如果您希望親身體驗文中的多軸控制示例,或將此高性能平臺應用于您的下一個工業自動化項目,您可以在我們的官方淘寶店購買開發套件,快速啟動您的項目研發。
-
運動控制
+關注
關注
5文章
828瀏覽量
34585 -
ethercat
+關注
關注
20文章
1524瀏覽量
45523 -
多軸控制器
+關注
關注
0文章
7瀏覽量
7844
發布評論請先 登錄
正運動技術運動控制器EtherCAT總線快速入門
Yaskawa安川電機:實現高精度運動控制的利器

基于睿擎派輕松玩轉EtherCAT主站,實現電機精確控制
12月10日 晚8點:手把手實戰EtherCAT,用睿擎平臺搞定多軸精密運動控制|問學直播




 工商網監
工商網監
評論