") 從運動感知到有效執(zhí)行控制的關鍵為什么是IMU?
從運動感知到有效執(zhí)行控制的關鍵為什么是IMU?

無人機穩(wěn)定飛行、機器人精準控制及工業(yè)自動化都需要高精度、高可靠的運動感知,感知數據質量不足或延遲,無法有效支撐高精度、高響應的閉環(huán)控制。這類設備都會使用IMU進行運動感知,但高性能慣性測量的需求與項目嚴格的成本預算之間卻出現了難以調和的矛盾。
ER-MIMU-M01A MEMS IMU憑借其卓越性能與可控成本,打破“高性能=高成本”的行業(yè)痛點,成為復雜動態(tài)環(huán)境中不可或缺的“運動神經中樞”。
微型化封裝與高集成度
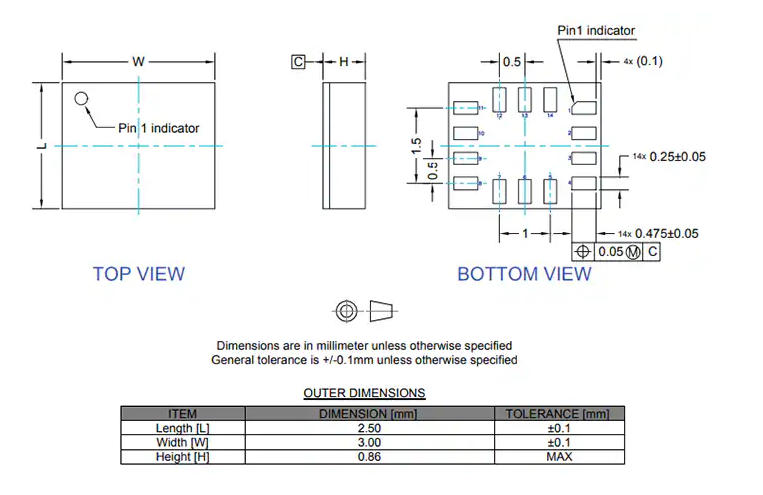
采用先進的MEMS工藝,將三軸陀螺儀與三軸加速度計高度集成于僅23.7mm x 23.7mm x 9.9mm的超緊湊空間內,重量控制在25克以下。這種極致的微型化設計使其能夠輕松嵌入空間受限的無人機飛控、機器人關節(jié)或自動化移動平臺中,顯著優(yōu)化系統結構布局。
高性能慣性傳感器
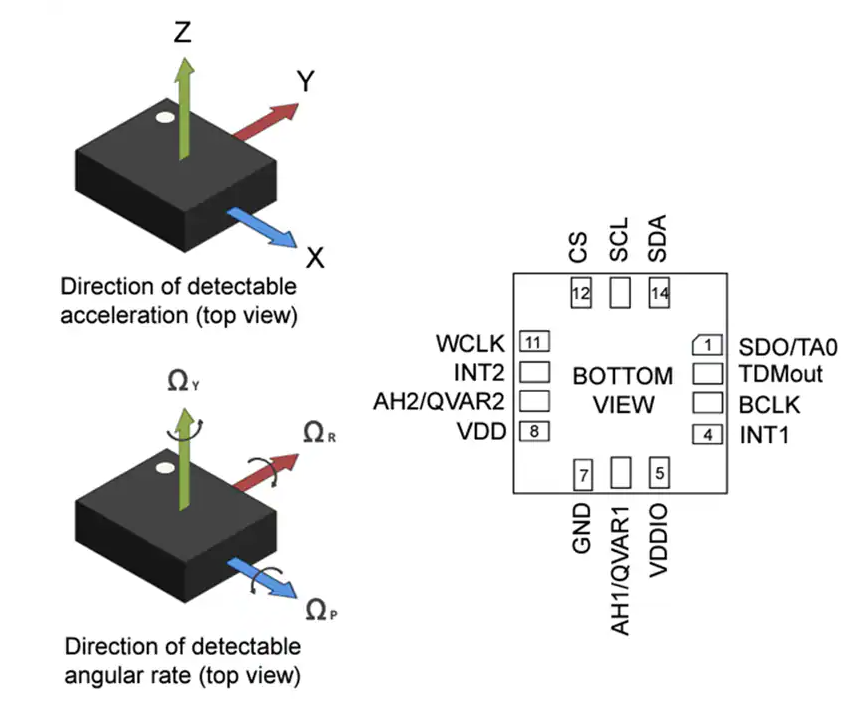
陀螺儀其測量范圍達±450°/s,可覆蓋無人機高速旋轉、機器人急轉向、工業(yè)機械臂快速擺動等動態(tài)場景的需求。全溫零偏≤36°/h,零偏不穩(wěn)定性≤2°/h,配合≤0.15°/√h 的角隨機游走特性,在長時間運行中(如無人機長航時飛行、機器人自主導航),它能提供極其穩(wěn)定的角速率測量,有效抑制姿態(tài)解算的累積漂移,保障航向和姿態(tài)信息的長期可信度。
加速度計±16g 的測量范圍可應對設備劇烈運動(如無人機快速拉升、機器人跌落緩沖)的加速度感知需求。全溫零偏≤3mg,零偏不穩(wěn)定性≤0.025mg,零偏穩(wěn)定性(1σ)≤0.2mg,這種超低噪聲特性使其能夠精確捕捉微小的線加速度變化(如機器人的精細動作、無人機的抗風擾控制),為速度和位置估算提供基礎數據。
姿態(tài)穩(wěn)定與敏捷控制
角速度和加速度數據是飛控算法實現精準姿態(tài)估計(滾轉、俯仰、偏航)和高速率閉環(huán)控制的基礎,保障無人機在強風擾動下的穩(wěn)定懸停、實現復雜的特技飛行和敏捷避障。
機器人轉向時,陀螺儀反饋轉向角速度,結合加速度計數據計算位移,確保機器人沿預設路徑行駛;安裝在機器人的關節(jié)運動中,IMU 能感知關節(jié)旋轉角度與加速度,配合伺服電機實現平滑運動,提升人機交互安全性,指導機器人調整步態(tài)、轉向或保持平衡。
集成于機械臂關節(jié)或腿部,實時測量連桿的角速度和加速度,實現更精準的運動軌跡跟蹤、碰撞檢測以及先進的力/位混合控制,提升操作的柔順性和安全性。
ER-MIMU-M01代表了現代慣性傳感技術的先進水平。其完美契合無人機、機器人及自動化裝備對核心運動感知單元嚴苛的要求。它不僅為系統提供了精確、可靠、實時的運動信息流,更是實現自主智能、精準控制和高可靠運行的關鍵部件。
審核編輯 黃宇
-
傳感器
+關注
關注
2577文章
55372瀏覽量
793374 -
機器人
+關注
關注
213文章
31320瀏覽量
223395 -
自動化
+關注
關注
31文章
5972瀏覽量
90571 -
無人機
+關注
關注
237文章
11360瀏覽量
196491
發(fā)布評論請先 登錄
靈巧手觸覺感知技術深度報告:從“單點感知”到“觸覺成像”

高性能MEMS IMU:機器人自主運動的核心感知中樞
從靜態(tài)到動態(tài):MEMS IMU 重塑測繪傳感邊界
精準感知:MEMS IMU在重載與極端場景下的慣性導航價值
從控制中樞到執(zhí)行末梢:機器人樣板貼片的精度密碼
M-G366PDG IMU模組高精度慣性測量單元抗振性能優(yōu)異

AI玩具驅動控制,從機械執(zhí)行到智能集成的技術革新
IMU應用領域及技術前景探討
LSM6DSV32X:高性能6軸IMU,賦能下一代智能運動感知應用
ISM330BX:高性能6軸IMU,賦能下一代智能運動感知與AI應用
E54系列人體運動感知與距離檢測雷達模組上位機配置使用說明

保持平衡及運動控制:人形機器人 IMU 芯片推薦
這個IMU是如何重新定義精準運動控制的?
MEMS IMU如何賦能無人機與機器人精準感知?
適用于無人機的 IMU 有哪些要求?




 工商網監(jiān)
工商網監(jiān)
評論