Neway電機方案在電機控制的應用場景Neway電機方案在電機控制領域的應用場景廣泛且效果顯著,其核心優勢在步進電機、伺服電機控制及CNC機床主軸驅動等場景中得到了充分驗證。一、步進電機與伺服電機
2026-01-04 10:10:11
電機(簡稱HB)。
步進電機區別于其他控制電機的最大特點是,它是通過輸入脈沖信號來進行控制的,即電機的總轉動角度由輸入脈沖數決定,而電機的轉速由脈沖信號頻率決定。
步進電機的驅動電路根據控制信號工
2026-01-04 08:25:51
在智能制造、消費電子與精密裝備飛速發展的今天,步進電機以其“脈沖對應位移”的精準控位特性、無累積誤差的穩定性、快速啟停的響應能力,成為定角度、定距離運動場景的核心執行元件,而步進電機的性能很大程度由
2025-12-30 18:33:39 51
51 
前言TMC2660C是由Trinamic推出的高集成、智能兩相步進電機驅動IC,以“精密控制+低功耗+靜音運行”為核心優勢,集成功率MOSFET、先進電流控制算法與無傳感診斷功能,無需大量外圍元件
2025-12-19 18:12:01239 
在醫療檢測設備的精準運轉、3D 打印機的細膩成型等場景中,步進電機的穩定表現直接影響設備整體效能,而驅動芯片作為步進電機的核心控制部件,其性能水平對設備運行質量起著關鍵作用。 德國 TRINAMIC
2025-12-11 11:31:41384 Trinamic步進電機驅動芯片低噪音?穩運行?久耐用在醫療檢測設備的精準運轉、3D打印機的細膩成型等場景中,步進電機的穩定表現直接影響設備整體效能,而驅動芯片作為步進電機的核心控制部件,其性能水平
2025-12-10 17:47:49195 
在泡沫起升儀的沖程控制中,毫米級定位精度是保障泡沫輸出穩定性、作業位置準確性的關鍵。步進伺服電機細分驅動技術作為核心電子方案,通過優化電機運行的控制邏輯,將電機的運動分解為更精細的單元,從而實現沖程
2025-12-04 09:20:40229 
的基本原理:
變頻器控制電機運行的兩種方式當變頻器主電路接好電源線之后,要控制電動機的運行,還需要給有關端子接上外圍接控制電路,并且將變頻器的啟動方式參數設為外部操作模式。
如圖中:換向器與繞組碳刷
2025-11-27 08:04:21
研制一塊PCBA。同時驅動兩個2相4線步進電機,電機電壓5v,電流300mA,PCBA板包括mcu,電源ic,驅動芯片等。整體尺寸約12mm*12mm(詳見dxf文件),和結構共形設計。選型合適的小型物理接口供電和通訊。交付時帶程序,控制程序的算法我們提供有意者聯系
2025-11-25 12:50:30
本文將介紹如何通過UART串口通信控制TMC2208/2209步進電機驅動模塊驅動42步進電機。從TMC2209詳細的說明的寄存器配置方法說明、常用指令說明、模塊的串口連接方式、電流、延遲時間等關鍵參數的計算方法等方面展開對TMC2209用UART串口通訊使用的教程。
2025-11-10 19:33:13987 
步進伺服電機作為工業自動化領域的關鍵部件,其穩定性和精度直接影響設備性能。然而在實際應用中,電機可能因參數配置、機械負載或環境因素出現異常。本文將針對六大典型問題提供系統性解決方案,結合工程實踐
2025-10-30 07:41:26470 ? ? ? 在自動化設備、精密儀器等需要精準控制的場景中,步進電機的驅動性能直接決定了設備的運行精度與穩定性,而HR4985作為一款內部集成譯碼器的微特步進電機驅動器,憑借其便捷的操作設計與可靠
2025-10-27 17:16:30488 
DRV8811器件為打印機、掃描儀和其他自動化設備應用提供集成的步進電機驅動器解決方案。該器件具有兩個 H 橋驅動器,以及用于控制步進電機的微步進索引器邏輯。
輸出驅動器模塊由配置為全H橋的N溝道功率MOSFET組成,用于驅動電機繞組。
2025-10-21 11:31:37604 
該DRV8821提供雙微步進步進電機控制器/驅動器 打印機、掃描儀和其他辦公自動化設備應用的解決方案。
兩個獨立的步進電機驅動電路包括四個 H 橋驅動器和 具有微步進功能的索引器邏輯。每個電機驅動模塊均采用N溝道功率MOSFET 配置為 H 橋以驅動電機繞組。
2025-10-21 11:27:34496 
該DRV8805為驅動單極步進電機提供了集成解決方案。它 包括四個具有過流保護的低側驅動器,并提供內置二極管進行箝位 電機繞組產生的關斷瞬變。
使用簡單的步進/方向接口控制單極步進電機的分度器邏輯 也是集成的。支持三種步進模式:2相(全步)、1-2相(半步)、 和 1 相(波驅動)。
2025-10-20 13:44:27494 
該DRV8818為打印機、掃描儀和其他自動化設備應用提供集成步進電機驅動器。該器件具有兩個 H 橋驅動器,以及用于控制步進電機的微步進索引器邏輯。
每個模塊的輸出驅動器模塊由配置為全H橋的N溝道功率MOSFET組成,以驅動電機繞組。
2025-10-20 11:21:59506 
該TPIC2060A是一款適用于12V ODD的低噪聲電機驅動器IC。9 通道驅動器 由串行接口控制的 IC 針對驅動主軸電機、雪橇電機進行了優化 (步進電機適用)、負載電機、對焦/跟蹤/傾斜執行器和步進電機 用于準直器透鏡。
2025-10-20 10:02:16426 
DRV8711器件是一個步進電機控制器,它使用外部 N 溝道 MOSFET 驅動一個雙極步進電機或兩個有刷直流電機。集成了微步進索引器,能夠實現從全步到 1/256 步的步進模式。
使用自適應
2025-10-17 15:09:52685 
集成的解決方案,適用于驅動微步進兩相雙極步進電機。它將用于N溝道MOSFET功率級的雙路全橋柵極驅動器與嵌入式非耗散過流保護相結合。得益于新的電流控制,通過自適應衰減模式實現1/16微步進,優于傳統實施方案
2025-10-17 11:44:30433 
STMicroelectronics EVL6480步進電機驅動器評估板基于L6480,提供了一套既經濟劃算又易于使用的解決方案,用于驅動用戶應用中的步進電機。L6480器件是一套先進、完全
2025-10-17 11:41:10394 
集成的解決方案,適用于驅動微步進兩相雙極步進電機。它將雙路低R~dsON~ DMOS全橋與精確的片上電流檢測電路相結合,實現非耗散電流控制和過流保護。得益于獨特的控制系統,可實現真正的1/16微步進。數字控制
2025-10-17 11:30:32448 
集成的解決方案,適用于驅動微步進兩相雙極步進電機。它將雙路低R~dsON~ DMOS全橋與精確的片上電流檢測電路相結合,實現非耗散電流控制和過流保護。得益于獨特的控制系統,可實現真正的1/128步進分辨率
2025-10-17 11:25:27448 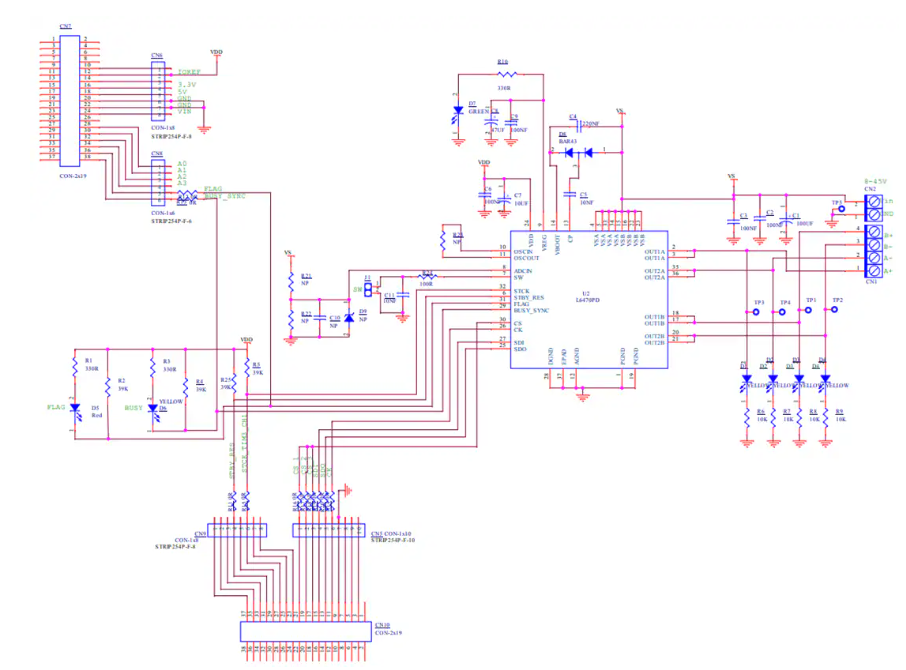
大家在運動控制的時候是用伺服電機的還是用步進電機做定位控制了?為什么有時候用伺服電機,有時候又步進電機?這是什么原因呢?本期我們就一起來探討一下步進電機和伺服電機的區別!
2025-10-15 14:32:511496 
該DRV8421為家用電器和其他機電一體化應用提供雙 H 橋電機驅動器。該器件可用于驅動一個或兩個直流電機、一個雙極步進電機或其他負載。簡單的PWM接口可輕松連接控制器電路。
2025-10-11 15:15:021099 
該DRV8818A為打印機、掃描儀和其他自動化設備應用提供集成步進電機驅動器。該器件具有兩個H橋驅動器和微步進索引器邏輯,用于控制步進電機。
每個模塊的輸出驅動器模塊由配置為全H橋的N溝道功率MOSFET組成,以驅動電機繞組。
2025-10-11 09:29:02666 
技術,TMC2208提供2 - 32微步選擇,TMC2209支持8 - 64微步選擇。文章最后提供了STM32F103控制TMC2208/TMC2209驅動42步進電機的程序。
2025-10-09 17:19:521267 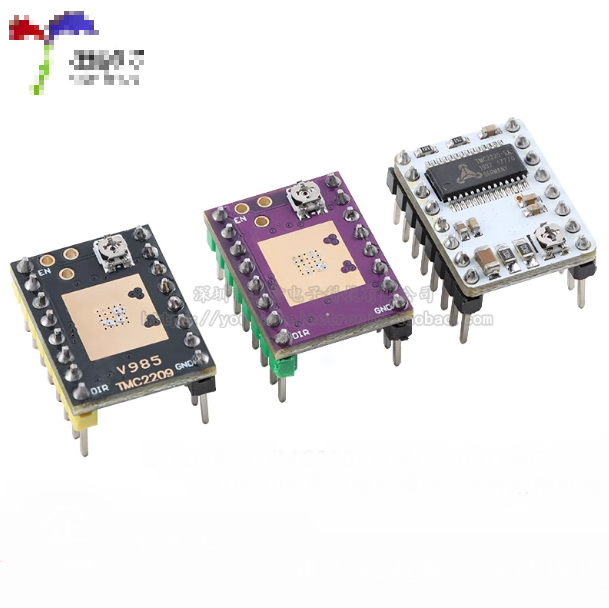
電壓 :范圍寬,從? 10V 至 44V 。這使得它可以輕松驅動額定電壓較高的步進電機,獲得更高的轉速和扭矩。 高級細分控制 : 內置? 2相步進電機脈沖控制器 。 支持豐富的細分設置,通過? CLK
2025-09-19 14:20:59528 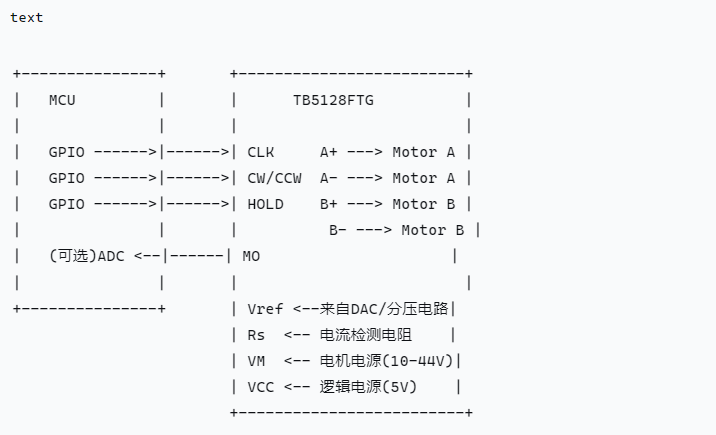
"MT6835絕對式磁編碼器賦能閉環步進電機,實現±0.05°高精度控制,解決傳統開環系統的失步與振動問題,工業應用合格率提升至99.5%。"
在工業自動化、機器人技術以及
2025-08-29 17:22:081053 步進電機作為一種常見的執行元件,因其結構簡單、控制方便等優點被廣泛應用于工業自動化、機器人、醫療設備等領域。然而,傳統的開環控制方式存在失步、振蕩等問題,難以滿足高精度應用場景的需求。本文將探討
2025-08-27 17:55:08843 可靠性。深入理解這兩個參數的內涵與應用邏輯,對工程師優化運動控制系統具有關鍵意義。 一、運動電流與保持電流的技術本質 運動電流是指步進電機在旋轉或步進動作時繞組中流過的驅動電流,其大小決定了電機輸出力矩的動態性
2025-08-22 07:42:59999 
在工業自動化的浪潮中,步進電機作為一種將電脈沖信號轉換為角位移或線位移的執行機構,被廣泛應用于各種自動化設備中。而閉環步進電機控制系統更是近年來的熱門技術,它能夠有效解決傳統開環步進電機存在的丟步
2025-07-28 17:30:18601 在工業自動化、智能設備等領域不斷發展的當下,閉環步進電機控制系統憑借其精準的控制性能和穩定的運行狀態,正發揮著越來越重要的作用。而MT6835磁編芯片的出現,為閉環步進電機控制系統帶來了全新的發展契機,助力其進入一個嶄新時代。
2025-07-24 17:02:02515 模擬控制電路對電機性能的影響,從而優化整個系統的設計。(三)材料特性定義Maxwell 提供了廣泛的材料庫,涵蓋了各種常見的磁性材料、導電材料等。用戶可以根據實際需求自定義材料的電磁特性,如磁導率
2025-07-24 16:52:14
電路、程序邏輯和參數設置,確保電機穩定運行。 控制的核心原理 步進電機的轉動遵循 “脈沖對應角度” 的原則,每接收一個脈沖信號,電機就會按照固定的步距角轉動一個角度,比如常見的四相步進電機步距角為 1.8°,即每接收
2025-07-24 13:41:35486 在掌握了GPIO口的使用后,就可以利用它的輸出工作模式來實現對步進電機的控制。
步進電機是一種常用的執行器件,使用它能進行精準的定位及轉速調節等工作。受驅動能力的限制,要驅動步進電機還要為它配上
2025-07-14 10:48:36
驅動芯片的電機驅動電路的設計與優化方案,結合電機驅動系統的硬件電路及軟件方案進行設計。主要實現了 MOSFET 的保護電路及利用 FAN73892 驅動芯片的電機驅動電路的設計。通過測試,臉證了基于驅動
2025-07-07 18:34:41
電子發燒友網站提供《TL494脈寬調制控制電路數據手冊.pdf》資料免費下載
2025-07-07 10:32:23 40
40 。典型總RON(高側+低側)為0.3 Ω。Analog Devices MAX22204集成了一個精確的電流驅動調節電路和一個由STEP/DIR接口控制的內置128微步分度器。高微步進分辨率和先進的控制技術確保平穩和安靜的運行。
2025-06-23 14:58:41740 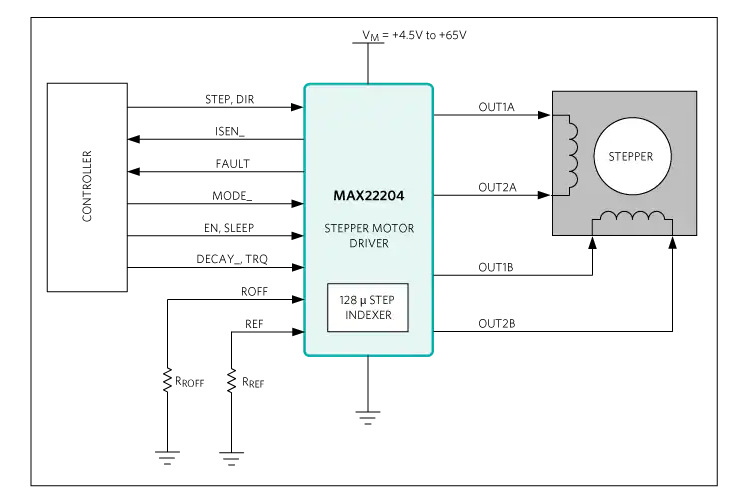
Analog Devices Inc. TMCM-3216步進電機控制器/驅動器模塊是緊湊型3軸雙極步進電機控制器和獨立驅動器板。Analog Devices Inc. TMCM-3216板支持多達
2025-06-23 14:44:541241 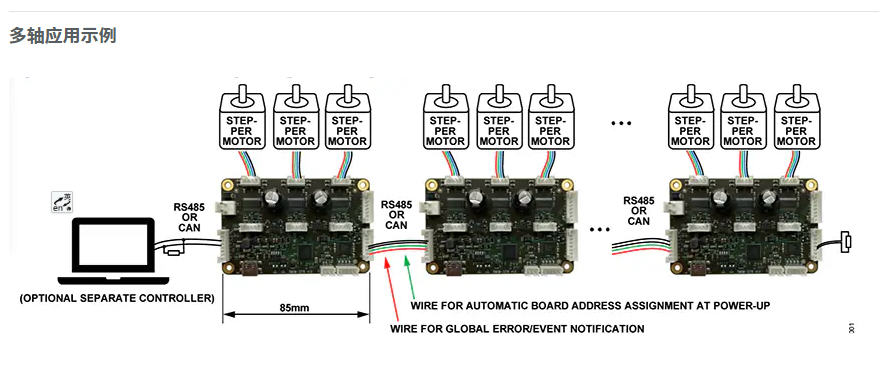
對同步電動機采用步進控制,模擬仿真該動態下電機各種參數對性能的影響,同時提出如何選取初值和確定合適的參數。
純分享帖,需要者可點擊附件免費獲取完整資料~~~*附件:同步電機步進運動性能分析.pdf【免責
2025-06-20 17:38:59
啟動速度不同
步進電機啟動需要200-400毫秒而伺服電機只需要幾毫秒是步進電機的上百倍
控制精度不同
步進電機的精度取決于相數和驅動器的細分設置;伺服電機的精度取決于編碼器的分辨率
反饋方式
2025-06-18 13:27:36
Adi Trinamic TMC5240x步進電機控制器和驅動器IC配備了串行通信接口(SPI和UART)和廣泛的診斷能力。這些智能高性能IC將靈活的斜坡優化斜坡發生器與步進電機驅動器結合在一起。該
2025-06-16 10:33:01928 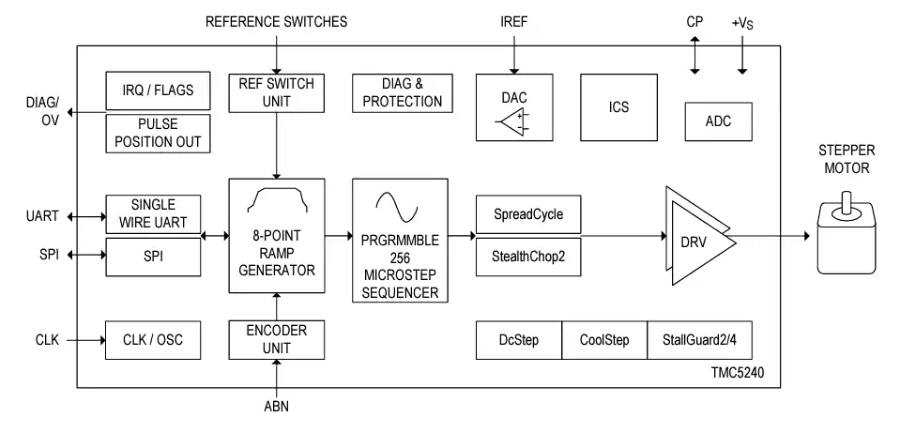
~ON~ (高側 + 低側)為0.25Ω。MAX22210集成了精確的電流驅動調節電路和由STEP/DIR接口控制的128級微步進內置分度器。高微步進分辨率和先進的控制技術確保平穩、安靜運行。
2025-06-14 14:52:09807 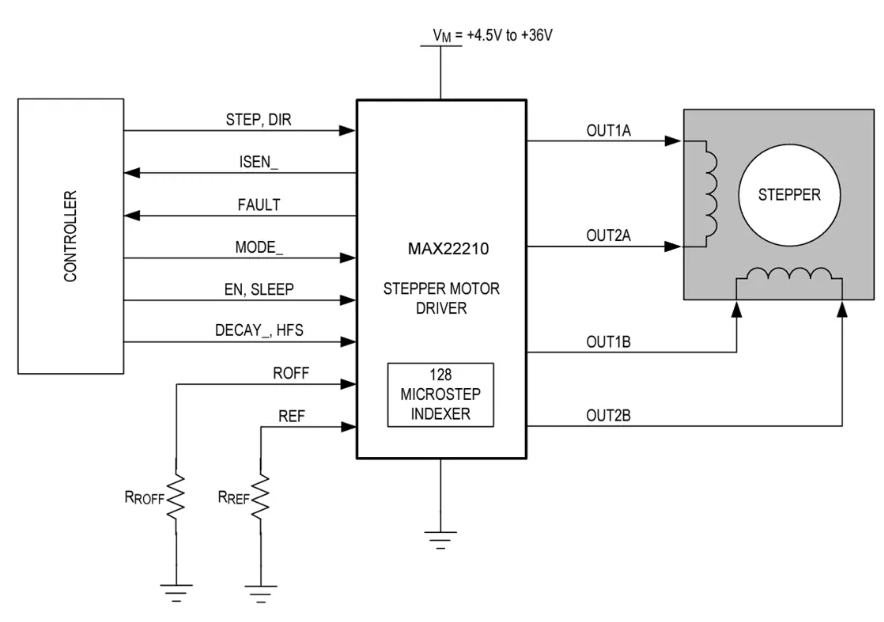
ADI Trinamic TMC5272步進電機控制器是一款 高性能雙軸步進控制器和驅動器IC,具有串行通信接口(SPI和UART)。該電機控制器的直流電壓范圍為2.1V至20V。TMC5272步進
2025-06-14 09:36:39808 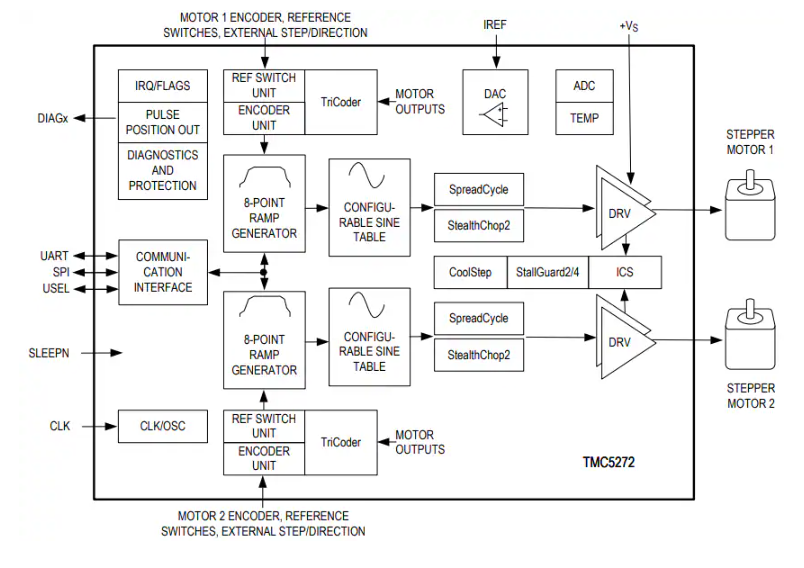
ADI Trinamic TMC5271步進電機控制器是一款 高性能、單軸步進控制器和驅動器IC,具有串行通信接口(SPI和UART)。該電機控制器的直流電壓范圍為2.1V至20V。TMC5271
2025-06-14 09:29:26845 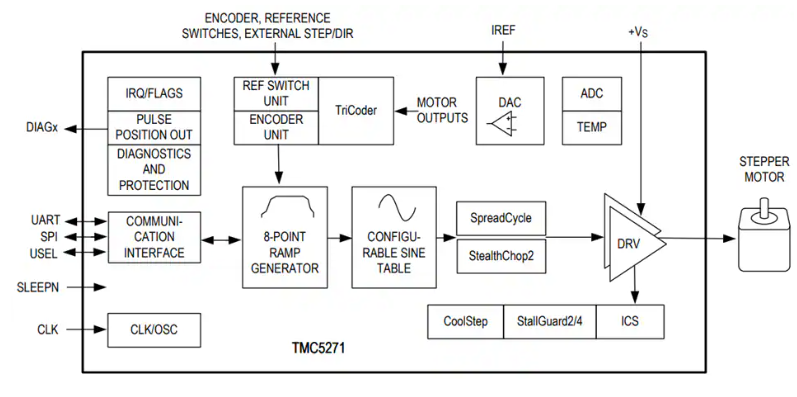
,同時對電機的快速起停和正反轉進行有效控制。
純分享帖,需要者可點擊附件免費獲取完整資料~~~*附件:三相反應式步進電機智能控制系統設計.pdf【免責聲明】本文系網絡轉載,版權歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權問題,請第一時間告知,刪除內容!
2025-06-13 09:31:29
這些指令主要是針對用 PLC 直接聯動伺服放大器,目的是可以不借助其他擴展設備(例如1GM 模塊)來進行簡單的點位控制, 使用這些指令時最好配合三菱的伺服放大器 (如 MR-J2)。然而,我們也可以用這些指令來控制步進電機的運行,下面我們來了解相關指令的用法。
2025-06-12 10:33:511721 
在當今世界,電機無處不在,從家用電器到工業機械都依賴其提供動力。鑒于電機消耗了全球能源的很大一部分,優化電機控制以實現節能的重要性再怎么強調也不為過。本文深入探討了電機的結構、變頻驅動器(VFD
2025-06-11 09:57:30
步進電機高速運行時,反電動勢幅值增大、頻率升高,導致電流建立延遲、扭矩下降及動態響應滯后。所以在步進電機高速運行的方案中,我們需要通過優化電機選型(如低電感、適中極數)、升壓驅動及BEMF反饋控制,可緩解高速性能衰減,避免PWM飽和導致的扭矩崩潰。
2025-06-10 16:06:401386 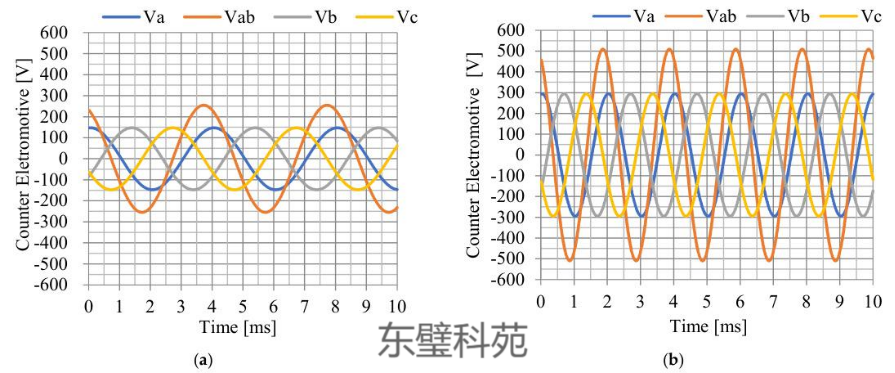
步進電機作為一種將電脈沖信號轉換為角位移的執行元件,在工業控制、自動化設備、3D打印等領域廣泛應用。其運行性能受多種因素影響,其中細分驅動技術和抗干擾能力是工程師特別關注的兩個核心問題。本文將
2025-06-07 17:42:42820 
純分享帖,需要者可點擊附件免費獲取完整資料~~~*附件:控制電路設計導致電機供電斷路器跳閘案例研究.pdf【免責聲明】本文系網絡轉載,版權歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權問題,請第一時間告知,刪除內容!
2025-06-06 14:08:17
1.1 控制電機、特種電機和傳統電機的區別
在各類自動化系統中,需要用到大量的各種各樣的元件,控制電機就是其中的重要元件之一。它屬于機電元件,在系統中具有執行、檢測和解算的功能。雖然從基本原理來說
2025-06-06 14:07:12
介紹了BYG通用系列二相步進電機最常采用的的單極性和雙極性2種驅動電路的設計方案,從原理上體現了一相步進電機的控制方法,增加了步進電機驅動電路設計的靈活性。二相步進電機的單極性和雙極性2種驅動
2025-05-28 15:38:41
Analog Devices Inc. TMCM-3216步進電機控制器/驅動器模塊是緊湊型3軸雙極步進電機控制器和獨立驅動器板。Analog Devices Inc. TMCM-3216板支持多達
2025-05-28 10:33:34844 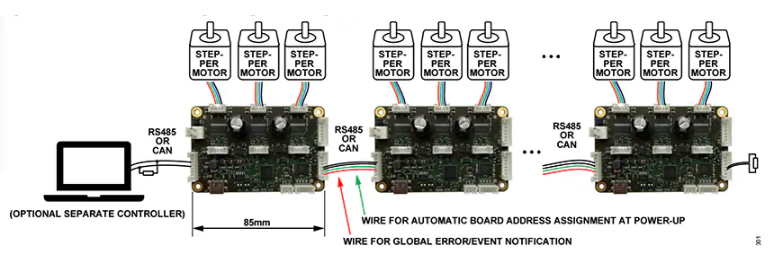
H橋是一種電子電路,可使其連接的負載或輸出端兩端電壓反相/電流反向。這類電路可用于機器人及其它實作場合中直流電動機的順反向控制及轉速控制、步進電機控制(雙極型步進電機還必須要包含兩個H橋的電機控制
2025-05-27 19:32:371610 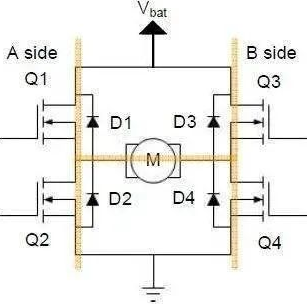
本文介紹了步進電機的工作原理,以及如何使用數據采集卡控制步進電機動作。
2025-05-26 15:53:151186 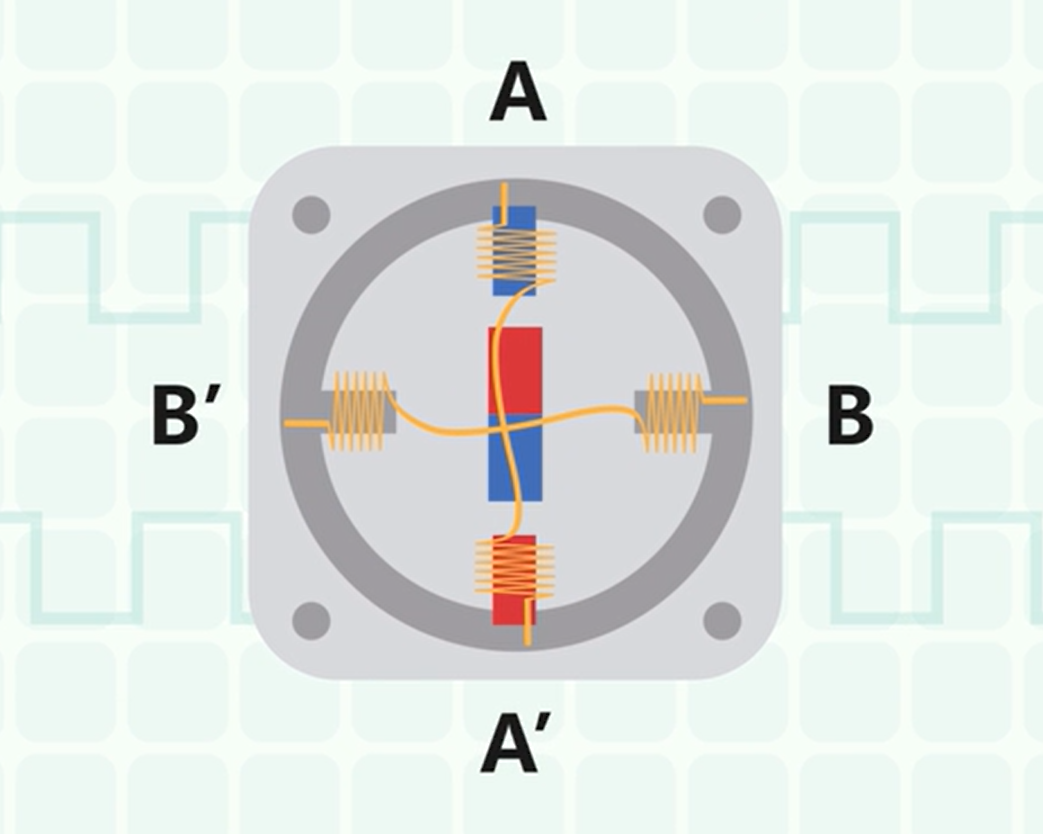
矢量控制的核心思想是為了簡化無刷電機的控制模型,將一個需要換相的無刷電機通過各種算法變換,抽象為一個直流電機的控制模型,只需要控制簡單的兩個直流分量來控制無刷電機,其中Vq抽象為直流電機的兩端
2025-05-21 19:33:301974 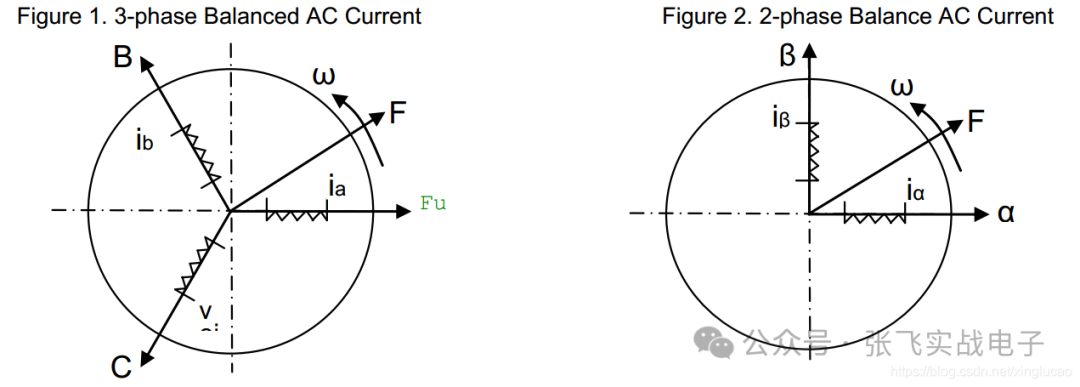
本文共精選了200多個電路,涉及電工技術的各個領域。全書共分為五大部分:電動機保護、能耗制動及水位控制電路,電動機和發電機啟動、驅動及調速控制電路,農村電工制作及實用電路,常用工業設備、日用
2025-05-14 16:59:29
一種用于步進電機加速度的新算法可以實現速度曲線的實時參數化和計算。該算法可以在低端微控制器上運行,只使用簡單的定點算術運算并且不使用數據表。它以恒定的加速度和減速度形成線性斜坡時間的準確近似值
2025-05-14 15:09:45
步進電機的發熱問題是一個需要關注的重要方面,發熱不僅影響電機的效率,還可能對電機的壽命和性能產生負面影響。為了減少步進電機的發熱,可以從以下幾個方面著手。 1. 選擇合適的電機: ● 在選型時,盡量
2025-05-11 17:51:50834 步進電機的干擾問題是一個復雜且常見的話題,這些干擾可能來源于步進電機本身,也可能來自外部環境。為了有效地應對這些干擾,可以從以下幾個方面進行考慮和解決。 一、步進電機對外部的干擾及其應對措施 步進
2025-05-11 17:38:191035 
HJ4205是一款步進電機驅動電路。包含一個步進電機控制器和內部N溝道MOSFET,來驅動一個雙極步進電機或兩個刷式直流電機。HJ4205支持全步進到1/256步進驅動模式。通過使用自適應消隱時間和包括自動混合衰減模式在內的多種不同的電流衰減模式,可實現非常平滑的運動過程。
2025-05-07 16:19:561571 
本文介紹了 RP2350 開發板使用 LabVIEW 上位機串口發送指令,實現步進電機 **單步** 和 **連續** 旋轉指定角度的項目設計。進一步結合具體的應用場景,設計了開發板與儀器的聯合調用、進而實現數據自動采集的應用案例。結合其他應用場景,有針對性地提出了工程設計思路與解決方案。
2025-05-05 16:58:44953 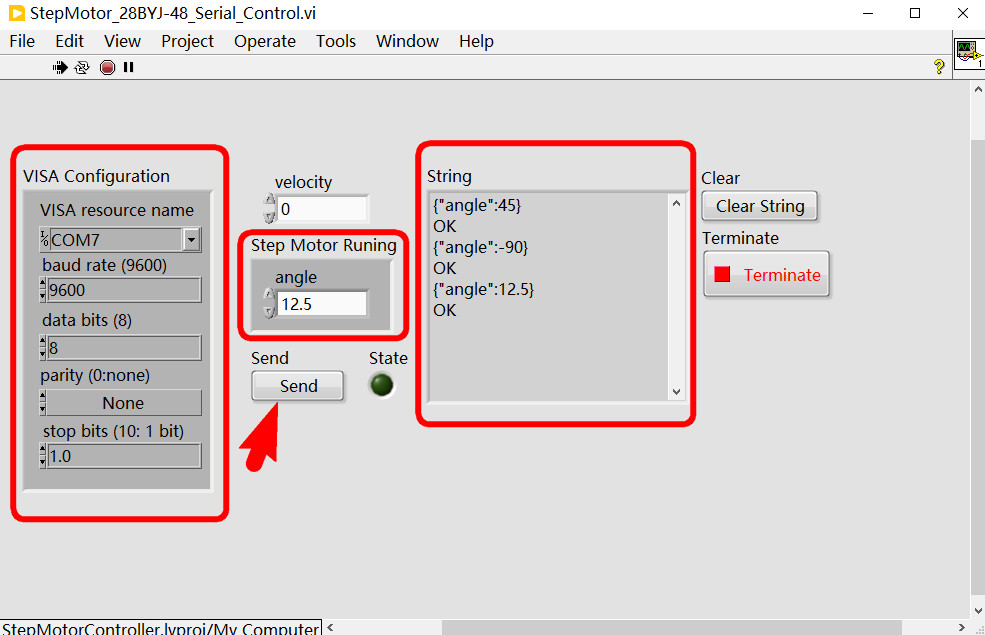
。
工作過程
通過控制器(如單片機)發送脈沖信號,驅動電路按順序切換定子繞組的電流方向。
每切換一次,轉子轉動一個步距角,連續脈沖使電機連續旋轉。
28BYJ-48 步進電機
28BYJ-48
2025-05-03 15:11:44
一、前言
步進電機驅動器是一種用于控制步進電機運動的裝置,它是將控制信號轉換成步進電機可以識別的控制電壓或電流的電路。它在工業自動化領域有著廣泛的應用,如機器人、印刷機、木工機床、噴繪機等。步進電機驅動器的組成結構主要由以下部分:
2025-04-27 17:52:52695 
剎車步進電機作為一種結合了步進電機精確控制與制動功能的特種電機,其獨特的設計和工作原理使其在需要快速啟停、精確定位的場景中展現出不可替代的優勢。以下從技術原理、性能特點、應用場景及發展趨勢等方面展開
2025-04-25 15:34:091196 
通過微機進行控制,在這種情況下,傳統的“電機控制”、“電氣傳動”已發展到“運動控制”、“遠程控制”和“嵌人式操作系統”新階段。用來控制電機運動的電驅動控制系統,包括前級的微功率控制電路、驅動電源和末級
2025-04-24 21:30:16
本書共13章。第1章緒論,介紹國內外電機控制專用集成電路發展情況,電機控制和運動控制、智能功率集成電路概況,典型閉環控制系統可以集成的部分和要求。第2~7章,分別敘述直流電動機、無刷直流電動機、步進
2025-04-22 17:02:31
步進電機過載時,可以采取以下措施進行處理: 一、降低電機負載 1. 減少負載:通過增加傳動比例、優化機械設計等方式來減輕步進電機的負載,確保其在額定負載范圍內運行。 2. 檢查機械部件:定期檢查步進
2025-04-21 07:41:251161 變頻器控制電機時需要設置的參數主要包括以下幾類: 一、基本運行參數 1. 頻率范圍:根據電機的額定頻率和工作要求,設置變頻器的頻率范圍。這決定了電機的轉速范圍。 2. 最大輸出電流:根據電機
2025-04-21 07:41:211867 在探討電機控制中IGBT(絕緣柵雙極性晶體管)驅動為何需要隔離的問題時,我們首先要了解IGBT的基本工作原理及其在電機控制中的應用,進而分析隔離技術在其中的重要性。 IGBT是一種結合了MOS柵器件
2025-04-15 18:27:451075 
基于51/32單片機按鍵控制步進電機正反轉,A4988驅動
2025-04-14 15:05:177 步進電機選型時,必須要了解以下幾個方面的信息以確保所選電機能夠滿足特定的應用需求: 1. 轉矩需求: ? ?● 步進電機的保持轉矩類似于傳統電機的“功率”,但物理結構和輸出特性有所不同
2025-04-14 07:38:161015 一、概述步進電機是一種數字控制電動機,其接受控制脈沖信號并相應的轉動一定的角度。實際運用中步進 電機與控制器是不可分割的整體,通過單片機、DSP 等微控制器產生的控制脈沖信號是弱電信號,需要 經過
2025-04-09 13:33:151 步進電機因其精準的位置控制和易于驅動的特性,廣泛應用于打印機、CNC機床、機器人等領域。無論您是初學者還是有一定經驗的工程師,這個系列都將為您提供有價值的知識和實踐指導。
2025-03-31 09:45:221432 
筆者設計本電路,并通過本文講 述其工作原理及制作方法,希望對廣大同行檢修怠 速步進電機故障有所幫助。純分享貼,有需要可以直接下載附件獲取資料!*附件:自制怠速步進電機測試器.pdf
2025-03-21 13:32:29
大家好,今天我們來聊一聊電機控制中的 MCU 選型如何考慮?不同應用對器件的要求 有很大的區別。目前市場上的控制器/驅動器解決方案各有千秋,包括了針對特定簡單應 用的標準控制器/驅動器、以及采用外部
2025-03-20 15:20:002 開源閉環步進電機控制器(原理圖+源代碼),采用PID算法控制,AS5047磁性角度檢測傳感器,高效防失步,快速學習PIDS算法,掌握單片機系統開發。
純分享貼,有需要可以直接下載附件獲取資料!
(如果內容有幫助可以關注、點贊、評論支持一下哦~)
2025-03-20 13:32:11
深圳南柯電子|EMC電機控制器測試整改:從問題識別到優化實踐
2025-03-20 09:34:19818 
步進電機作為位置控制的執行元件在汽車電子系統中被廣泛應用。納芯微公司針對汽車上的步進電機應用推出雙極性步進電機驅動芯片-NSD8389 ,可以幫助客戶快速可靠地進行步進電機控制。
2025-03-17 14:00:282821 
使用STM32F103控制兩步進電機同時進行不同的運動(軟件指令驅動),與控制一個電機的不同之處在于哪里?
2025-03-10 08:22:45
,高壓驅動電路輸入是直流 360V輸出交 流有效值約 250V,功率 60KW,效率>95%。在控制電路和驅動電路上做了一些優化, 超過了預期的設計目標要求關
2025-03-07 14:34:3310 步進電機由于驅動簡單、高效實用,常作為機床或生產線的輔助設備,在工業自動化生產中發揮著重要的作用。工業領域中多步進電機協同控制運用廣泛,需要運用多步進電機控制生產高精度產品的場景也越來越多,如精密
2025-03-06 11:03:031003 
對編碼器的要求各不相同。例如,在步進電機控制中,可能需要編碼器來提供精確的位置反饋,以實現精確控制。而在智能系統中,編碼器可能用于測量和記錄設備的運動狀態,以優化系統性能。 二、了解編碼器類型 編碼器根據刻度方法及
2025-03-05 07:34:401051 
一種用于步進電機加速度的新算法可以實現速度曲線的實時參數化和計算。該算法可以在低端微控制器上運行,只使用簡單的定點算術運算并且不使用數據表。它以恒定的加速度和減速度形成線性斜坡時間的準確近似值
2025-03-04 21:17:04
行星減速機在減速步進電機中扮演著至關重要的角色。其主要作用是通過使用行星齒輪組來減小輸出轉速并增大輸出扭矩。這種設計使得步進電機能夠在運行時穩定地輸出所需的扭矩,從而更好地滿足各種應用的需求
2025-03-03 11:31:411028 
電機轉速控制電路(PWM信號)主要采用 L298N ,通過單片機的 I/O 輸入改變芯片控制端的電平,即可以對電機 進行正反轉,停止的操作,輸入引腳與輸出引腳的邏輯關系圖為驅動直流電機和步進電機的詳細資料可下載PDF文檔![hide]
[/hide]
2025-02-26 16:02:15
步進電機作為一種能將數字輸入脈沖轉換成旋轉或直線增量運動的電磁執行元件,在自動化控制領域具有廣泛應用。步進電機的接線方法因線數的不同而有所差異,以下是4線、6線、8線步進電機的接線方法詳解,幫助讀者
2025-02-26 09:08:5212576 
步進電機依靠控制電脈沖信號的頻率和數量來調控轉動的步數與速度,具備分步控制的特性。為了讓步進電機的控制更加順滑,微步控制技術應運而生。以下是微步控制的優勢與挑戰的詳細揭秘: 一、微步控制的優勢 1.
2025-02-25 07:33:571103 
空心軸步進電機是一種特殊設計的步進電機,其核心特點在于擁有一個或多個空心軸,這些軸不僅允許電機的其他部件通過,還可以根據需要集成額外的功能,如散熱、連接其他設備等。
2025-02-24 14:47:071047 
電子發燒友網綜合報道,電機控制和驅動的分類方式多種多樣,若按電機類型劃分,可分為直流電機驅動、交流電機驅動和步進電機驅動。步進電機依靠控制電脈沖信號的頻率和數量,來調控轉動的步數與速度,具備分步控制
2025-02-19 00:47:002500 無刷直流(BLDC)電機因其高效、可靠和低維護需求而得到廣泛應用。然而,控制這類電機面臨諸多挑戰,尤其是在實現平穩、高效運行方面。本文將探討磁場定向控制(FOC)作為一種先進的方法如何優化BLDC電機性能、減少轉矩紋波并提升整體效率。
2025-02-13 14:19:162257 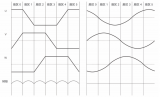
的電機類型包括直流電機、步進電機和伺服電機。每種電機都有其特定的應用場景和控制要求。 1.1 電機類型 直流電機 :適用于需要連續速度控制的應用。 步進電機 :適用于需要精確位置控制的應用。 伺服電機 :適用于需要高精度速度和位
2025-01-22 09:37:161463 之前,首先需要確定您將使用的電機類型。常見的電機類型包括: 直流電機(DC Motor) :適用于需要精確控制速度和扭矩的應用。 交流電機(AC Motor) :包括感應電機和同步電機,適用于廣泛的工業應用。 步進電機(Stepper Motor) :適用于
2025-01-22 09:22:474064 ? ? ? 在選擇搬運機械手的電機時,需要考慮多個因素以確保電機的性能滿足機械手的運行需求。以下是一個詳細的案例分析,說明如何為搬運機械手選擇合適的電機。 ? ? ? ? 一、電機類型選擇
2025-01-21 16:44:451591 
? ? ? 步進電機,作為一種將電脈沖信號轉換為相應角位移或線位移的電動機,是現代數字控制系統中不可或缺的重要組件。其工作原理基于電磁學原理,通過接收數字控制信號(電脈沖信號)并轉化為機械位移,步進
2025-01-21 16:43:462503 
微型步進電機作為一種精密控制的電動機,在現代科技中扮演著至關重要的角色。它以高精度、可控性強、低成本等優勢,被廣泛應用于各種自動化設備和精密儀器中。從3D打印機、機器人,到醫療設備、消費電子產品,微型步進電機的身影無處不在,成為了現代技術發展的強大驅動力。
2025-01-18 10:56:51900 一體式步進電機是一種將步進電機與驅動器集成在一起的設備,旨在為用戶提供更為便捷的使用體驗。這種設計不僅節省了空間,還提高了系統的整體性能和可靠性。一體式步進電機廣泛應用于多個領域,包括但不限于3C組裝測試、電子、醫療、環保、通訊和包裝等。
2025-01-13 16:27:53971 
中空軸步進電機是一種特殊設計的步進電機,其核心工作原理基于電磁感應定律。當導線線圈中的電流發生變化時,會在其周圍產生磁場,這個磁場會對附近的線圈產生力,導致該線圈的運動。中空軸步進電機由定子和轉子
2025-01-06 15:06:101677 
用于需要高精度和高速度的應用中,如數控機床、機器人等。 2. 微步驅動器/細分驅動器:通過細分步進角或微步技術來提高電機的運動平滑性和精度。這種驅動器廣泛應用于需要精細運動控制的場合,如3D打印機、激光雕刻機等。 3. 雙極性驅
2025-01-06 08:08:561700 
 電子發燒友App
電子發燒友App








 工商網監
工商網監
評論