工作原理、調(diào)速分類及技術(shù)特點(diǎn)三個(gè)維度展開系統(tǒng)闡述。 一、交流伺服電機(jī)的工作原理與結(jié)構(gòu)特性 交流伺服電機(jī)本質(zhì)上是一種采用閉環(huán)控制的交流電動(dòng)機(jī),其運(yùn)行機(jī)理基于電磁感應(yīng)定律。定子繞組通入三相交流電后產(chǎn)生旋轉(zhuǎn)磁場,帶動(dòng)
2025-12-13 07:37:34 200
200 
農(nóng)業(yè)一般氣象站W(wǎng)X-QC7能實(shí)時(shí)監(jiān)測溫度,冬季的溫度變化對(duì)農(nóng)作物的水分需求影響顯著。當(dāng)氣溫較低時(shí),農(nóng)作物的蒸騰作用減弱,水分蒸發(fā)變慢。例如,在寒冷的冬季夜晚,氣溫可能降至冰點(diǎn)以下,此時(shí)農(nóng)作物幾乎停止
2025-12-10 16:36:44
CW32W031如果使用終端+節(jié)點(diǎn)的架構(gòu),一般節(jié)點(diǎn)可以用啥模塊?也必須使用CW32W031芯片嗎?節(jié)點(diǎn)可以支持多少個(gè)終端?一般支持的范圍距離是多少?
2025-12-10 06:48:52
CW32R031一般距離能設(shè)計(jì)到多遠(yuǎn)?這種支持1連多么?
2025-12-09 08:08:22
CW32L083的內(nèi)置獨(dú)立校準(zhǔn)的RTC這一般怎么玩?
2025-12-09 07:04:30
一般想要實(shí)現(xiàn)OTA的話,使用藍(lán)牙升級(jí)好還是4G這種方式實(shí)現(xiàn)升級(jí)?
2025-12-09 06:01:48
伺服電機(jī)增益調(diào)節(jié)是運(yùn)動(dòng)控制中的核心環(huán)節(jié),直接影響系統(tǒng)的響應(yīng)速度、穩(wěn)定性和精度。本文將深入解析增益參數(shù)的作用機(jī)理、調(diào)節(jié)方法及典型應(yīng)用場景,幫助工程師實(shí)現(xiàn)伺服系統(tǒng)的最佳性能匹配。 一、增益參數(shù)
2025-12-08 07:42:00614 的精準(zhǔn)調(diào)控,避免傳統(tǒng)驅(qū)動(dòng)方式下定位偏差較大、運(yùn)行卡頓等問題,為泡沫起升儀的高效作業(yè)提供可靠的動(dòng)力控制支撐。? 一、技術(shù)核心邏輯:從“粗放驅(qū)動(dòng)” 到 “精細(xì)分解”? 步進(jìn)伺服電機(jī)的傳統(tǒng)驅(qū)動(dòng)方式,通常是按照電機(jī)固有
2025-12-04 09:20:40229 
目前單片機(jī)如何進(jìn)行加解密鑰操作,一般使用哪種形式,具體流程是什么樣子的?
2025-12-04 06:09:54
在做三表的時(shí)候,如果芯片出現(xiàn)的死機(jī)或者程序跑飛的情況,一般是怎么處理?外置看門狗還是內(nèi)置看門狗?還是用什么手段啊?
2025-12-03 07:27:52
請(qǐng)問一下,CW32L083VCT6的DeepSleep模式下,功耗一般在多少?
2025-12-03 06:14:35
話說,CW32L010的外部時(shí)鐘晶振一般用多大的?
2025-12-02 08:20:11
瞬時(shí)功耗一般怎么測?
2025-12-02 07:07:18
CW32的22 字節(jié) OTP 存儲(chǔ)器一般都怎么使用?
2025-12-02 06:39:44
芯源的時(shí)鐘檢測系統(tǒng)一般怎么實(shí)現(xiàn)的?
2025-12-01 08:25:34
。本文將從基礎(chǔ)原理到前沿技術(shù),系統(tǒng)梳理伺服電機(jī)的控制方式及其應(yīng)用特點(diǎn)。 一、伺服控制的基本架構(gòu) 伺服系統(tǒng)由伺服電機(jī)、驅(qū)動(dòng)器、控制器和反饋裝置構(gòu)成閉環(huán)控制回路。其核心是通過實(shí)時(shí)比較目標(biāo)指令與反饋信號(hào)的偏差,采用PID算
2025-12-01 07:37:18429 
一般芯源的芯片開機(jī)之前需要做LVD檢測嗎?
2025-11-26 08:05:06
Parker提供了多款不同的伺服電機(jī),性能各有不同,針對(duì)特定易燃易爆場所使用的防爆伺服電機(jī),與普通通用伺服電機(jī)存在諸多區(qū)別,接下來就進(jìn)一步看看Parker防爆伺服電機(jī)與普通伺服電機(jī)的區(qū)別
2025-11-20 13:36:27265 
上回我們介紹了EtherCAT是如何利用SSC產(chǎn)生的sync信號(hào),與電機(jī)控制系統(tǒng)完成同步的,如此我們即可保證整個(gè)控制系統(tǒng)的同步性能伺服控制。在此基礎(chǔ)上,伺服電機(jī)的實(shí)時(shí)精確控制要求電機(jī)控制系統(tǒng)具有較高的響應(yīng)帶寬,其中,電機(jī)的電流環(huán)路設(shè)計(jì)對(duì)于系統(tǒng)帶寬的提升,扮演著至關(guān)重要的角色。
2025-11-17 09:53:297032 
和電磁環(huán)境造成有害干擾。二、不同類型FCC認(rèn)證的周期區(qū)別FCCSDoC(Supplier’sDeclarationofConformity,自我聲明)適用對(duì)象:一般
2025-11-03 17:35:0411 
FCC認(rèn)證周期取決于產(chǎn)品類型、測試復(fù)雜度以及認(rèn)證方式(自我聲明或由授權(quán)機(jī)構(gòu)辦理)。一般來說,從樣品測試到獲得證書的時(shí)間大致在2~8周之間。以下是詳細(xì)說明:一、FCC認(rèn)證簡介FCC認(rèn)證是美國聯(lián)邦通信
2025-11-03 17:14:34658 測量絕緣電阻一般用絕緣電阻測試儀,俗稱兆歐表或搖表,是專用核心儀器。
常用儀器類型
手搖式兆歐表:手動(dòng)搖柄產(chǎn)生直流高壓,結(jié)構(gòu)簡單、成本低,適合常規(guī)低壓設(shè)備測量。
數(shù)字式絕緣電阻測試儀:自動(dòng)輸出高壓,數(shù)字顯示結(jié)果,精度高、操作省力,適配高低壓設(shè)備及高精度需求。
2025-11-03 15:13:19
案例,幫助技術(shù)人員快速定位和解決問題。 ? 一、電機(jī)振動(dòng)與噪音異常 振動(dòng)和噪音是步進(jìn)伺服系統(tǒng)最常見的故障征兆。某包裝生產(chǎn)線曾出現(xiàn)電機(jī)運(yùn)行時(shí)伴隨尖銳嘯叫,經(jīng)檢測發(fā)現(xiàn)共振頻率與機(jī)械結(jié)構(gòu)固有頻率重合。解決方法包括:首先
2025-10-30 07:41:26464 大家在運(yùn)動(dòng)控制的時(shí)候是用伺服電機(jī)的還是用步進(jìn)電機(jī)做定位控制了?為什么有時(shí)候用伺服電機(jī),有時(shí)候又步進(jìn)電機(jī)?這是什么原因呢?本期我們就一起來探討一下步進(jìn)電機(jī)和伺服電機(jī)的區(qū)別!
2025-10-15 14:32:511496 
將系統(tǒng)分析三菱伺服電機(jī)抖動(dòng)和異響的常見原因,并提供詳細(xì)的調(diào)整解決方案,幫助技術(shù)人員快速定位和解決問題。 一、機(jī)械因素導(dǎo)致的抖動(dòng)與異響 機(jī)械因素是伺服電機(jī)異常振動(dòng)和噪聲的首要排查方向。當(dāng)電機(jī)與負(fù)載機(jī)械連接存在
2025-10-14 07:37:021053 舵機(jī)與伺服電機(jī)都屬于 可精確控制的驅(qū)動(dòng)裝置 ,但二者在定義范圍、結(jié)構(gòu)組成、控制方式和應(yīng)用場景上存在顯著差異,并非完全等同(舵機(jī)是伺服電機(jī)的 “特殊子集”)。以下從核心維度展開對(duì)比,幫助清晰區(qū)分: 一
2025-10-13 10:21:071169 存在顯著差異,需要根據(jù)具體工況進(jìn)行針對(duì)性選擇。 一、動(dòng)態(tài)制動(dòng):快速響應(yīng)的能耗型制動(dòng) 動(dòng)態(tài)制動(dòng)(Dynamic Braking)通過在電機(jī)斷電瞬間將繞組端子短接或接入制動(dòng)電阻,將旋轉(zhuǎn)動(dòng)能轉(zhuǎn)化為熱能消耗。當(dāng)伺服驅(qū)動(dòng)器檢測到停機(jī)指令
2025-09-19 18:26:111302 
電能質(zhì)量在線監(jiān)測裝置硬件故障檢測的一般流程遵循 “安全優(yōu)先、先易后難、先外后內(nèi)、排除法 + 驗(yàn)證法” 的核心邏輯,從 “故障現(xiàn)象確認(rèn)” 到 “故障定位” 再到 “維修驗(yàn)證”,形成閉環(huán)操作,確保高效、準(zhǔn)確排查故障,同時(shí)避免二次損壞或安全風(fēng)險(xiǎn)。
2025-09-19 18:00:07687 PART1人形機(jī)器人心臟:伺服電機(jī)驅(qū)動(dòng)器隨著人工智能和機(jī)器人技術(shù)的飛速發(fā)展,人形機(jī)器人正逐步成為智能制造和未來生活的新伙伴。在這一領(lǐng)域,伺服電機(jī)作為人形機(jī)器人的“心臟”,其性能直接決定了機(jī)器人的運(yùn)動(dòng)
2025-08-30 10:57:24533 
在現(xiàn)代工業(yè)自動(dòng)化的大舞臺(tái)上,伺服電機(jī)編碼器就像是一位默默無聞卻至關(guān)重要的幕后英雄。它精準(zhǔn)地測量和反饋電機(jī)的位置、速度等關(guān)鍵信息,確保整個(gè)系統(tǒng)能夠高效、穩(wěn)定地運(yùn)行。然而,要讓這位“英雄”充分發(fā)揮其作用
2025-08-29 17:27:21715 連接方案。?1DL28工業(yè)連接器用于伺服電機(jī)領(lǐng)域DL28工業(yè)連接器,作為凌科主打大電流連接市場的一款力作,其優(yōu)勢顯著,創(chuàng)新度高,可匹配伺服電機(jī)全新訴求,有助于實(shí)現(xiàn)
2025-08-28 18:13:27396 
在工業(yè)自動(dòng)化領(lǐng)域,伺服電機(jī)扮演著至關(guān)重要的角色,其動(dòng)態(tài)響應(yīng)性能直接影響著整個(gè)生產(chǎn)系統(tǒng)的效率和精度。而bldc驅(qū)動(dòng)方案|整套磁編方案|磁編芯片(IC)|無刷馬達(dá)驅(qū)動(dòng)ic|艾畢勝電子的出現(xiàn),為優(yōu)化伺服電機(jī)動(dòng)態(tài)響應(yīng)性能帶來了新的契機(jī)。今天,咱們就來深入探討一下MT6835是如何在這方面大展身手的。
2025-08-06 17:23:37678 變頻電源是聯(lián)、席呂/生/150-1909-3116 一種將市電(通常為50Hz/60Hz)轉(zhuǎn)換為頻率可調(diào)、電壓可調(diào)、波形純凈穩(wěn)定(通常為正弦波)的交流電源的設(shè)備。它主要用在需要精確控制交流電頻率
2025-08-06 09:25:24513 
、強(qiáng)振動(dòng)、多粉塵等惡劣環(huán)境下存在明顯局限性。近年來,MT6835高速磁編碼技術(shù)的出現(xiàn),為下一代伺服電機(jī)閉環(huán)控制提供了全新的解決方案,其非接觸式測量、抗干擾能力強(qiáng)、體積小巧等優(yōu)勢,正在推動(dòng)伺服控制技術(shù)邁向新的高度。
2025-08-05 17:44:44859 在工業(yè)自動(dòng)化、機(jī)器人技術(shù)以及新能源汽車等眾多領(lǐng)域,伺服電機(jī)控制系統(tǒng)都扮演著至關(guān)重要的角色。而測量電機(jī)的旋轉(zhuǎn)角度,對(duì)于實(shí)現(xiàn)精確的運(yùn)動(dòng)控制起著決定性作用。今天,我們就來深入探討一下MT6825磁編芯片如何為伺服電機(jī)控制系統(tǒng)帶來全角度測量能力。
2025-07-29 16:40:39525 伺服電機(jī)的運(yùn)行需要一個(gè)參考點(diǎn),這個(gè)參考點(diǎn)就是原點(diǎn)。原點(diǎn)通常是由光電開關(guān)或機(jī)械開關(guān)來確定的,其位置是固定的。當(dāng)伺服電機(jī)運(yùn)行時(shí),控制器會(huì)根據(jù)原點(diǎn)的位置來計(jì)算電機(jī)的位置。如果沒有原點(diǎn),控制器就無法確定電機(jī)的位置,從而無法精確地控制機(jī)器的運(yùn)動(dòng)。
2025-07-26 09:43:403012 
至關(guān)重要的作用。今天,我們就來深入探討一下MT6825磁編芯片,看看它是如何為伺服電機(jī)控制系統(tǒng)帶來全角度測量能力的。
2025-07-24 16:52:25607 伺服電機(jī)(英文:servomotor),在機(jī)器人、制造設(shè)備以及汽車等眾多領(lǐng)域有著廣泛應(yīng)用。
2025-07-18 15:11:193838 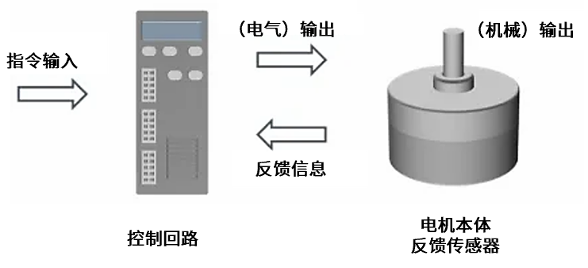
解析。 一、核心原理與技術(shù)架構(gòu)差異 1. 控制對(duì)象本質(zhì)不同 伺服系統(tǒng)采用閉環(huán)控制,通過編碼器實(shí)時(shí)反饋電機(jī)轉(zhuǎn)速、位置等參數(shù),形成高精度閉環(huán)調(diào)節(jié)。其核心由伺服電機(jī)(通常為永磁同步電機(jī))、高分辨率編碼器(17位以上)和專用
2025-07-13 16:30:021698 
在高速數(shù)據(jù)傳送中,設(shè)計(jì)人員選擇高速率的光電耦合器時(shí),對(duì)于大多數(shù)應(yīng)用,只需要合理應(yīng)用廠商設(shè)計(jì)的數(shù)據(jù)傳輸速率(DTR),一般都可以正常通過設(shè)計(jì)論證。相較于高速率(數(shù)百kbps以上)的信號(hào)傳送,數(shù)kHz或
2025-06-24 09:53:44705 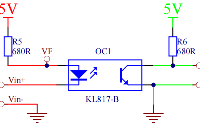
較少,只能實(shí)現(xiàn)基本的系統(tǒng)狀態(tài)監(jiān)控和報(bào)警等功能。同時(shí),需要現(xiàn)場對(duì)每個(gè)電機(jī)驅(qū)動(dòng)器參數(shù)逐一進(jìn)行設(shè)定,不便于系統(tǒng)的使用和調(diào)試\"1。因此,針對(duì)基于CAN總線的多電機(jī)伺服系統(tǒng),設(shè)計(jì)一種實(shí)時(shí)性高、運(yùn)行
2025-06-23 07:15:19
雙電機(jī)同步聯(lián)動(dòng)伺服系統(tǒng)是用兩個(gè)具有相同參數(shù)的交流同步電機(jī)!共同驅(qū)動(dòng)一個(gè)大齒輪的轉(zhuǎn)動(dòng),每個(gè)交流同步電機(jī)各自帶動(dòng)一個(gè)小齒輪,小齒輪再與大齒輪嚙合,從而帶動(dòng)大齒輪轉(zhuǎn)動(dòng)。當(dāng)黏性摩擦力忽略不計(jì)時(shí),根據(jù)齒輪系統(tǒng)
2025-06-18 16:26:58
不同
步進(jìn)電機(jī)開環(huán)控制無反饋;伺服電機(jī)閉環(huán)控制能直接對(duì)電機(jī)編碼器反饋信號(hào)進(jìn)行采樣,性能更為可靠
過載能力不同
步進(jìn)電機(jī)一般不具有過載能力啟動(dòng)頻率過高或者負(fù)載過大的時(shí)候容易丟失;伺服電機(jī)的過載能力是比較
2025-06-18 13:27:36
鎧裝光纜和一般光纜的核心區(qū)別在于結(jié)構(gòu)設(shè)計(jì)和應(yīng)用場景,以下是兩者的詳細(xì)對(duì)比分析: 一、結(jié)構(gòu)差異 鎧裝光纜 外層保護(hù):在光纜外護(hù)套內(nèi)部增加金屬或非金屬鎧裝層(如鋼帶、鋁帶、芳綸纖維等),形成多層防護(hù)結(jié)構(gòu)
2025-06-10 09:58:381899 
什么是伺服電機(jī)編碼器?
伺服電機(jī)編碼器是伺服系統(tǒng)中的核心反饋元件,用于實(shí)時(shí)檢測電機(jī)的轉(zhuǎn)速、位置、角度等參數(shù),并將信號(hào)反饋給控制器(如伺服驅(qū)動(dòng)器),形成閉環(huán)控制,確保電機(jī)運(yùn)動(dòng)的精準(zhǔn)性和穩(wěn)定性。
其
2025-06-09 11:07:312334 
緊湊型防水連接器用于伺服電機(jī)電源和信號(hào)傳輸伺服電機(jī)作為一種高精度、高響應(yīng)的動(dòng)力裝置,一方面,需要電力輸入提供動(dòng)力來源支持;另一方面,需要信號(hào)連接器以實(shí)現(xiàn)控制信號(hào)的即時(shí)
2025-05-20 18:29:26653 深入剖析伺服電機(jī)過載保護(hù)的三大關(guān)鍵參數(shù)——過載保護(hù)系數(shù)、電子齒輪比和加速度曲線,結(jié)合工程實(shí)踐中的調(diào)試技巧,幫助讀者構(gòu)建系統(tǒng)化的參數(shù)優(yōu)化方案。 一、過載保護(hù)系數(shù)的動(dòng)態(tài)平衡藝術(shù) 過載保護(hù)系數(shù)(OLP)是伺服驅(qū)動(dòng)器的第一
2025-05-20 07:44:021812 永磁交流伺服電機(jī)的編碼器相位為何要與轉(zhuǎn)子磁極相位對(duì)齊
其唯一目的就是要達(dá)成矢量控制的目標(biāo),使 d 軸勵(lì)磁分量和 q 軸出力分量解耦,令永磁交流伺服電機(jī)定子繞組產(chǎn)生的電磁場始終正交于轉(zhuǎn)子永磁場,從而
2025-05-14 16:00:34
伺服電機(jī)作為工業(yè)自動(dòng)化領(lǐng)域的核心部件,其運(yùn)行狀態(tài)直接影響設(shè)備效率和生產(chǎn)線穩(wěn)定性。判斷伺服電機(jī)是否損壞需要結(jié)合多維度檢測方法,從基礎(chǔ)觀察、性能測試到專業(yè)診斷層層遞進(jìn)。以下為系統(tǒng)性判斷流程及實(shí)操要點(diǎn)
2025-05-12 17:21:203512 
問題,有一些可能是使用環(huán)境造成,有一些可能是人為不小心損壞了。下面,天波小編就來簡單介紹人臉識(shí)別門禁終端的一般故障排查方法吧。【電源問題】當(dāng)人臉識(shí)別門禁終端出現(xiàn):接上電
2025-04-27 10:45:271845 
伺服電機(jī)的測試流程是確保電機(jī)正常工作的關(guān)鍵步驟。以下是對(duì)伺服電機(jī)測試流程的詳細(xì)分析。 ?一、初步檢查與準(zhǔn)備 1. 外觀檢查:首先,對(duì)伺服電機(jī)進(jìn)行外觀檢查,確保電機(jī)完好無損,沒有明顯的物理損傷或變形
2025-04-23 17:56:301247 伺服電機(jī)過熱故障是工業(yè)控制領(lǐng)域中常見的問題,為了有效應(yīng)對(duì)這一故障,可以采取以下措施: 一、檢查散熱系統(tǒng) ● 散熱風(fēng)扇與散熱片:首先檢查伺服電機(jī)的散熱風(fēng)扇和散熱片是否正常工作。散熱風(fēng)扇負(fù)責(zé)將電機(jī)
2025-04-23 17:04:051978 Part 01 前言
相信搞硬件的兄弟一般都見過芯片電源引腳一般會(huì)放一個(gè)電容,而且這個(gè)電容一般是100nF,而且芯片電源引腳旁的電容內(nèi)一般還叫做去耦電容也就是Decoupling Capacitor
2025-04-22 11:38:11
西門子伺服電機(jī)簡明樣本
2025-04-14 15:36:19 2
2 安川伺服電機(jī)的靈活適配性,使其在汽車制造、電子裝配、物流分揀等領(lǐng)域大放異彩。作為工業(yè)自動(dòng)化領(lǐng)域的重要組成部分,安川伺服電機(jī)將繼續(xù)發(fā)揮其高精度、強(qiáng)勁動(dòng)力和高速轉(zhuǎn)動(dòng)的特點(diǎn),為各個(gè)行業(yè)的發(fā)展提供更加高效、智能的解決方案。
2025-04-10 13:38:281893 
伺服電機(jī)的一些資料,純分享帖,需要者可點(diǎn)擊附件獲取完整資料~~~
(免責(zé)聲明:本文系網(wǎng)絡(luò)轉(zhuǎn)載,版權(quán)歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權(quán)問題,請(qǐng)第一時(shí)間告知,刪除內(nèi)容!)
2025-04-01 14:36:03
伺服電機(jī)驅(qū)動(dòng)器:運(yùn)動(dòng)控制系統(tǒng)的“心臟”伺服驅(qū)動(dòng)器作為運(yùn)動(dòng)控制系統(tǒng)的驅(qū)動(dòng)層和“心臟”,一般通過位置、速度和力矩三種方式對(duì)伺服電機(jī)進(jìn)行控制,實(shí)現(xiàn)高精度的傳動(dòng)系統(tǒng)定位。
2025-03-27 17:45:581581 
這篇文章主要介紹了使用EtherCAN轉(zhuǎn)CANopen網(wǎng)關(guān)控制伺服電機(jī)的步驟,包括配置軟件、創(chuàng)建新工程、搜索設(shè)備、添加主站設(shè)備、導(dǎo)入EDS文件、添加從站設(shè)備、設(shè)置參數(shù)、生成和下載。文章最后介紹了在線監(jiān)控和I/O功能映射的功能。
2025-03-23 17:30:30672 
一般工控機(jī)與防爆工控機(jī)在多個(gè)方面存在顯著差異,以下是兩者的主要不同點(diǎn): 一、應(yīng)用場景 ● 一般工控機(jī):通常用于各種行業(yè)中的常規(guī)設(shè)備或裝置的自動(dòng)控制,如工業(yè)自動(dòng)化、機(jī)器人、交通運(yùn)輸、醫(yī)療器械、能源管理
2025-03-21 07:35:42848 
要將三菱伺服電機(jī)設(shè)置為無編碼器模式(也稱為開環(huán)控制模式),需要遵循一定的步驟和注意事項(xiàng)。以下是一個(gè)詳細(xì)的指南: 一、了解無編碼器模式 無編碼器模式是指伺服電機(jī)在沒有編碼器反饋信號(hào)的情況下,根據(jù)輸入
2025-03-20 07:41:441327 上文我們了解了TVS管的定義和參數(shù),那么今天我們?cè)?b class="flag-6" style="color: red">一起看看TVS管應(yīng)該如何選型。
2025-03-17 16:10:552265 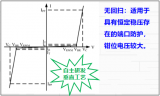
在保密要求較高的場合,通常使用以下幾種網(wǎng)線: 一、光纖布線 主要特點(diǎn):傳輸信息的速率和帶寬高,在規(guī)定的距離內(nèi)支持1GBase-T和10GBase-T,是六類雙絞線速率的4至40倍。線路無電磁輻射
2025-03-17 10:07:341150 伺服電機(jī)編碼器的選型是一個(gè)綜合性的過程,需要考慮多個(gè)因素以確保所選編碼器能夠滿足系統(tǒng)的性能要求。以下是一些關(guān)鍵的選型步驟和考慮因素: 一、明確應(yīng)用需求 首先,需要明確伺服電機(jī)編碼器的應(yīng)用需求,包括
2025-03-11 12:01:041702 
技術(shù)的不斷發(fā)展,伺服電機(jī)也面臨著一系列挑戰(zhàn),如高精度控制、快速響應(yīng)、負(fù)載能力、成本控制和可靠穩(wěn)定性等方面的問題。
2025-03-07 16:38:541672 
使用OpenVINO?模型的 OpenCV* 進(jìn)行人臉檢測。
使用 cv2.矩形 函數(shù),能夠獲取檢測到的面部的坐標(biāo)。
檢測到多張人臉時(shí),多個(gè)坐標(biāo)被捕獲到,伺服電機(jī)和步入器電機(jī)都發(fā)生移動(dòng)。
2025-03-07 06:35:09
STM32開發(fā)板一般都會(huì)配置arduino接口,是不是基本上也都會(huì)支持arduino?這個(gè)在哪里可以查詢開發(fā)板是否支持
2025-03-07 06:33:06
P1032BF1是一款基于ARM Cortex-M3的單片機(jī),專為Wi-Fi /藍(lán)牙通信控制而設(shè)計(jì);能夠?qū)崿F(xiàn)指紋的圖像采集、特征提取、特征比對(duì),可應(yīng)用于智能鎖;支持大型程序代碼和擁有大型嵌入式SRAM,也可用于一般的MCU應(yīng)用。
2025-03-04 09:27:09760 永磁交流伺服電機(jī)的編碼器相位為何要與轉(zhuǎn)子磁極相位對(duì)齊,其唯一目的就是要達(dá)成矢量控制的目標(biāo),使 d 軸勵(lì)磁分量和 q 軸出力分量解耦,令永磁交流伺服電機(jī)定子繞組產(chǎn)生的電磁場始終正交于轉(zhuǎn)子永磁場,從而
2025-03-03 01:58:19
在選擇一款合適的直流伺服電機(jī)和減速機(jī)時(shí),我們需要綜合考慮多個(gè)因素,以確保所選設(shè)備能夠滿足特定的應(yīng)用需求,同時(shí)實(shí)現(xiàn)高效、穩(wěn)定和可靠的運(yùn)行。以下將從電機(jī)類型、性能參數(shù)、減速機(jī)選型、應(yīng)用環(huán)境以及成本效益
2025-02-27 12:04:241275 
伺服驅(qū)動(dòng)器的主要作用是控制伺服電機(jī),實(shí)現(xiàn)高精度的傳動(dòng)系統(tǒng)定位 ?。 伺服驅(qū)動(dòng)器,又稱為“伺服控制器”或“伺服放大器”,是現(xiàn)代運(yùn)動(dòng)控制的重要組成部分。它通過接收外部控制信號(hào),對(duì)伺服電機(jī)進(jìn)行精確的速度
2025-02-20 10:06:132912
DLPC3438長時(shí)間工作,一般10~50小時(shí),會(huì)出現(xiàn)投影停止問題。
發(fā)生問題時(shí),測試與主板的I2C通訊正常,使用的是Trigger in模式,不投影后,測試Pattern Ready信號(hào)波形
2025-02-20 07:12:01
語音信號(hào)經(jīng)過放大器到TLC320AD50C,放大倍數(shù)一般多少倍?還有同相與反向信號(hào)一定要一樣大小嗎?
2025-02-17 08:24:18
的固定式讀碼器,并非單純以價(jià)格高低作為唯一衡量標(biāo)準(zhǔn),而是需要綜合考慮多個(gè)方面。一般來說,市場上固定式讀碼器的價(jià)格區(qū)間較為廣泛,從幾百元到數(shù)萬元不等。對(duì)于追求性價(jià)比的
2025-02-14 13:51:39834 
光纜接頭預(yù)留長度的具體要求可能會(huì)因應(yīng)用場景、設(shè)計(jì)規(guī)范或特定需求而有所不同。但一般來說,光纜接頭預(yù)留長度通常有一個(gè)基本標(biāo)準(zhǔn)。 一種常見的標(biāo)準(zhǔn)是,光纜接頭預(yù)留長度一般不少于7米。這一長度確保了光纜在接頭
2025-02-14 09:55:132706 伺服電機(jī)是一種高精度、高響應(yīng)速度的電機(jī),廣泛應(yīng)用于工業(yè)自動(dòng)化、機(jī)器人、航空航天等領(lǐng)域。在實(shí)際應(yīng)用中,有時(shí)需要改變電機(jī)的旋轉(zhuǎn)方向,以滿足不同的工作需求。本文將詳細(xì)介紹伺服電機(jī)改變方向的方法,包括
2025-02-12 11:07:522633
一般都用MDAC做程控放大,不知道TI的MDAC內(nèi)部電阻多大?比如說 DAC7802DAC8043DAC8811.
2025-02-12 06:34:55
【電磁兼容技術(shù)案例分享】伺服控制器產(chǎn)品電機(jī)抖動(dòng)EMC自兼容問題案例
2025-02-11 09:40:25908 
無法滿足高精度、高效率的需求。這時(shí),交流伺服驅(qū)動(dòng)器應(yīng)運(yùn)而生,成為現(xiàn)代工業(yè)的“智能心臟”。什么是交流伺服驅(qū)動(dòng)器簡單來說,交流伺服驅(qū)動(dòng)器是一種能夠精確控制電機(jī)速度、位
2025-02-08 15:04:321224 
? ? ? 舵機(jī)和伺服電機(jī)在自動(dòng)化和機(jī)器人技術(shù)領(lǐng)域中都是常用的執(zhí)行器,它們都能夠?qū)崿F(xiàn)精確的位置控制,但二者之間存在一些基本的區(qū)別,具體如下: ? ? ? 一、定義與構(gòu)成 ? ? ? 1. 舵機(jī)
2025-02-07 07:37:411933 
? ? ? 絕對(duì)式編碼器在伺服電機(jī)控制中的應(yīng)用廣泛且重要,其優(yōu)勢顯著,以下是對(duì)其應(yīng)用與優(yōu)勢的詳細(xì)分析: ? ? ??一、絕對(duì)式編碼器在伺服電機(jī)控制中的應(yīng)用 ? ? ? 絕對(duì)式編碼器是一種常用的位置
2025-02-06 09:46:151722 
在印刷電路板(PCB)的制造、組裝和檢測過程中,Mark 點(diǎn)定位是確保精度的關(guān)鍵環(huán)節(jié)。以下是 Mark 點(diǎn)定位的一般原則和步驟。 (一)設(shè)計(jì)階段 位置規(guī)劃 在 PCB 設(shè)計(jì)之初,就需要規(guī)劃 Mark
2025-02-05 17:37:002713 類特殊的運(yùn)放,相較于傳統(tǒng)的一般運(yùn)放,在輸入/輸出范圍、性能特點(diǎn)及應(yīng)用場景等方面展現(xiàn)出顯著的優(yōu)勢。本文將深入探討軌到軌運(yùn)放與一般運(yùn)放的區(qū)別,旨在為工程師提供全面的技術(shù)理解和設(shè)計(jì)指導(dǎo)。
2025-01-30 16:29:003021 在電子和通信系統(tǒng)中,信號(hào)線作為信息傳輸?shù)拿浇椋潆妷禾匦詫?duì)于系統(tǒng)的性能和穩(wěn)定性至關(guān)重要。了解信號(hào)線電壓的一般范圍以及正確的測量方法,對(duì)于確保系統(tǒng)的正常運(yùn)行和優(yōu)化性能具有重要意義。本文將深入探討信號(hào)線電壓的一般范圍、測量方法以及測量過程中需要注意的事項(xiàng),旨在為相關(guān)領(lǐng)域的工程師和技術(shù)人員提供有價(jià)值的參考。
2025-01-29 16:40:005975 移動(dòng)電源(充電寶)的容量并沒有一個(gè)固定的標(biāo)準(zhǔn),常見的容量范圍一般在5000mAh至20000mAh之間,當(dāng)然市面上也有更高或更低容量的產(chǎn)品。選擇合適的移動(dòng)電源容量主要取決于個(gè)人的使用需求和場景。
2025-01-27 15:56:005386
我使用AM26LS31芯片,將3.3V脈沖轉(zhuǎn)換為雙路脈沖,用于驅(qū)動(dòng)伺服電機(jī),伺服電機(jī)接收的脈沖數(shù)大于控制器實(shí)際發(fā)送的脈沖。我將AM26LS31的輸入腳直接接GND和3.3V時(shí),伺服電機(jī)也會(huì)接收到脈沖,請(qǐng)問工程師,這個(gè)問題用什么方法可以解決?
2025-01-23 07:32:39
在自動(dòng)化控制系統(tǒng)中,電機(jī)控制器和伺服系統(tǒng)是實(shí)現(xiàn)精確運(yùn)動(dòng)控制的關(guān)鍵組件。電機(jī)控制器負(fù)責(zé)接收控制信號(hào)并驅(qū)動(dòng)電機(jī),而伺服系統(tǒng)則確保電機(jī)按照預(yù)定的軌跡和速度精確運(yùn)動(dòng)。 電機(jī)控制器的基本概念 電機(jī)控制器是一
2025-01-22 09:35:461593 伺服電機(jī)編碼器故障及維修,伺服電機(jī)編碼器4大常見故障,編碼器信號(hào)丟失或不穩(wěn)定,編碼器零點(diǎn)偏移,編碼器過熱,編碼器機(jī)械損壞;伺服電機(jī)編碼器4大維修方法:在維修伺服電機(jī)編碼器時(shí),需要維修人員具備一
2025-01-21 14:49:354303 
在現(xiàn)代工業(yè)自動(dòng)化和控制系統(tǒng)中,伺服電機(jī)編碼器扮演著至關(guān)重要的角色。它能夠精確測量電機(jī)的位置、速度和方向,為系統(tǒng)提供準(zhǔn)確的反饋信息,實(shí)現(xiàn)高精度的運(yùn)動(dòng)控制。伺服電機(jī)編碼器作為伺服系統(tǒng)中的關(guān)鍵部件,其性能和可靠性直接影響著整個(gè)系統(tǒng)的運(yùn)行效果。
2025-01-20 14:01:181821
tlv5618的參考電壓一般都是多少,是怎么選的?是不是DAC的參考電壓選值都一樣?
如果電源電壓VDD不是正好是3或5V,3.58V時(shí)影響大嗎?
2025-01-20 08:00:39
今天看到一個(gè)電路用DAC8801加一個(gè)運(yùn)放組成的輸出0到2.5V的dac,為什么不直接用一般的voltage output的DAC,如DAC8830,這兩種DAC有什么有缺點(diǎn),求TI的專家?guī)椭忉屜隆Vx謝
2025-01-17 08:47:04
伺服電機(jī)靜電防護(hù)完整方案 伺服電機(jī)是一種能夠?qū)㈦娔苻D(zhuǎn)換為機(jī)械能的裝置,通過接收控制信號(hào)來實(shí)現(xiàn)對(duì)電機(jī)轉(zhuǎn)速、轉(zhuǎn)向和位置的控制。它具有高精度、高速度和高效率的特點(diǎn),能夠?qū)㈦妷盒盘?hào)轉(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速,以驅(qū)動(dòng)
2025-01-09 14:28:371192 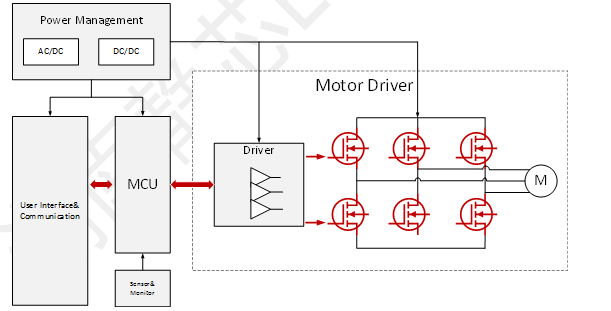
ADS1291接收到的數(shù)據(jù)波形怎么這樣?一般是什么問題造成的?
2025-01-09 06:46:16
在自動(dòng)化和機(jī)器人技術(shù)領(lǐng)域,精確控制機(jī)械運(yùn)動(dòng)是至關(guān)重要的。舵機(jī)和伺服電機(jī)是兩種常用的執(zhí)行器,它們都能夠?qū)崿F(xiàn)精確的位置控制。盡管它們?cè)谀承?yīng)用中可以互換使用,但它們之間存在一些基本的區(qū)別,這些區(qū)別影響了
2025-01-08 17:39:212432 關(guān)鍵字:測徑儀電機(jī),無刷電機(jī)測徑儀,測徑儀伺服電機(jī),測徑儀步進(jìn)電機(jī),測徑儀核心部件,
測徑儀,特別是激光掃描測徑儀,其核心部件之一便是電機(jī)。電機(jī)的種類和性能對(duì)測徑儀的測量精度和穩(wěn)定性有著至關(guān)重要
2025-01-07 14:23:41
的轉(zhuǎn)子做得細(xì)長一些,以滿足快速響應(yīng)的要求。 傳統(tǒng)型直流伺服電動(dòng)機(jī)按勵(lì)磁方式的不同,可分為電磁式直流伺服電動(dòng)機(jī)和永磁式直流伺服電動(dòng)機(jī)兩種。 電磁式直流伺服電動(dòng)機(jī)又分為他勵(lì)式、并勵(lì)式和串勵(lì)式,但一般多用他勵(lì)式。 低慣
2025-01-07 10:22:211782 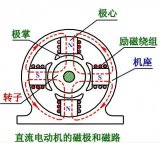
安規(guī)測試通常包括絕緣電阻測試、接地連續(xù)性測試、電源線漏電流測試、工作漏電流測試、耐壓測試、溫度測試等多個(gè)項(xiàng)目,這些項(xiàng)目的目的是確保電氣設(shè)備在運(yùn)行時(shí)對(duì)使用者和設(shè)備本身的安全。其中,耐壓測試是一個(gè)
2025-01-06 17:02:252569 
購買云服務(wù)器是否帶數(shù)據(jù)庫,這主要取決于所選擇的云服務(wù)提供商及其具體的套餐或服務(wù)內(nèi)容。一般來說,云服務(wù)器本身是一個(gè)提供計(jì)算能力、存儲(chǔ)空間和網(wǎng)絡(luò)連接資源的虛擬服務(wù)器,它本身并不直接包含數(shù)據(jù)庫服務(wù)。然而
2025-01-06 10:25:12765 伺服電機(jī)滑環(huán)是一種用于電機(jī)與轉(zhuǎn)動(dòng)部分之間傳遞電信號(hào)和電力的裝置。它主要用于需要360度連續(xù)旋轉(zhuǎn)的系統(tǒng)中,能夠有效解決傳統(tǒng)電纜在旋轉(zhuǎn)過程中扭結(jié)、磨損的問題。
2025-01-06 09:36:181210 
光譜傳感器是一種能夠測量物質(zhì)光譜特性的儀器,其一般原理主要基于物質(zhì)對(duì)不同波長的光的吸收、發(fā)射和散射等特性進(jìn)行分析,從而獲取物質(zhì)的光譜信息。以下是對(duì)光譜傳感器一般原理的詳細(xì)解釋:
2025-01-05 14:16:411832
 電子發(fā)燒友App
電子發(fā)燒友App








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論