可利用 Artix-7 FPGA 和 Xilinx 機器視覺合作伙伴 Sensor to Image 的 IP 實現多標準的可擴展攝像機平臺,與之前的工業攝像機設計相比,其具有最佳的功率性能、最低的功耗和更低的總體 BOM 成本。
2014-12-31 11:04:34 2370
2370 
假設已經實現了電機控制,后續的電機標定大抵上分成兩類,一類是效率標定,一類是外特性標定。前者目標是以提升在各工況下的系統效率。假設你了解交直軸變換,那么效率標定的目標,就是通過調整交直軸電流,在不同的轉速條件下,以更高的效率來實現扭矩。這個過程就是不斷調整你的交直軸電流(對于異步機還得調整轉差率);
2023-08-04 10:26:187692 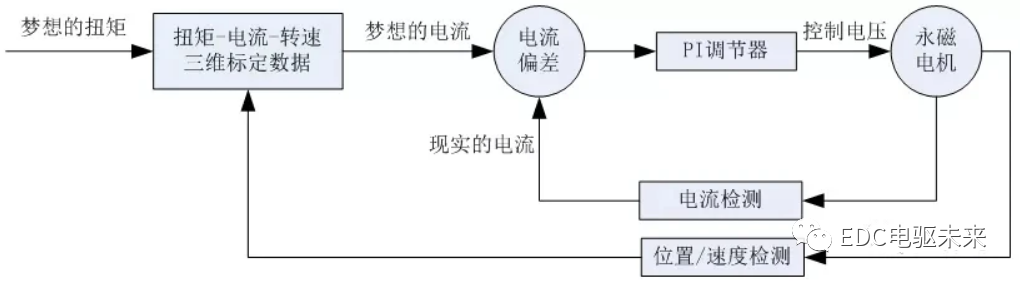
攝像機標定是什么?如何對攝像機標定進行分類?傳統攝像機標定方法分為哪些?攝像機自標定方法有哪些?
2021-04-13 06:10:19
在機器視覺中,怎么標定坐標原點啊,我用的圖像匹配可以標定一個坐標原點,但是在不同的圖像上會有偏移,怎么才能減小偏移呢。求大家指教一下
2013-01-18 15:53:54
本帖最后由 lilin0734 于 2017-11-15 20:09 編輯
機器視覺手眼標定
2017-11-06 10:45:41
、圓和橢圓3.9 攝像機標定3.9.1 面陣攝像機的攝像機模型3.9.2 線陣攝像機的攝像機模型3.9.3 標定過程3.9.4 從單幅圖像中提取世界坐標3.9.5 攝像機參數的準確度3.10 立體
2016-06-29 13:48:38
是攝像機、轉鼓等,它們都把三維的影像作為輸入源,即輸入計算機的就是三維管觀世界的二維投影。如果把三維客觀世界到二維投影像看作是一種正變換的話,則機器視覺系統所要做的是從這種二維投影圖像到三維客觀世界
2019-07-08 08:30:00
,相對于立體視覺中攝像機間的標定,這種方法只需對攝像機內參數進行標定,提高了系統的效率。4.定位算法基本過程:簡單的算法過程,可基于OpenCV進行簡單實現。輸入通過攝像頭獲取的視頻流(主要為灰度圖像
2019-06-08 08:30:00
``【課程推薦】龍哥手把手教你學LabVIEW機器視覺設計教程請問哪位大神有Labview機器視覺相機標定的程序文件,麻煩分享一下?在下不甚感激!qq:599108466.``
2016-05-25 12:36:45
最近在學習NI 視覺助手的標定訓練,想請教一下:在標定時我們輸入的一般是一個標定板1,如果圖像有較大的畸變失真(這里有個問題1:這個失真是指我要檢測的圖像存在失真還是指拍攝的標定板圖像的失真?)則需
2016-06-13 11:14:32
labview視覺九點標定程序分享下,感謝各位大佬
2021-01-25 18:08:29
最近在做視覺,需要用labview做相機的標定,通過空間轉換確定空間位置。視覺助手的標定只能標定內參數,沒有辦法做內外參數的標定,哪位大神給指導指導如何做一個標準的標定程序。
2017-04-24 16:08:44
OpenMV項目旨在通過開發開源的低成本機器視覺攝像機,為業余愛好者和制造商提供機器視覺。第一代OpenMV攝像機基于STM32F ARM Cortex-M MCU和Omnivision
2020-09-29 14:49:30
雙目視覺的原理:由于視差原理,左右兩個ccd的位置固定,若能測量空間中同一個點P在左右兩個ccd中圖像的位置,則根據三角原理,可以求得P點在空間中的坐標位置。可用于攝像頭實現空間點的距離測量。下圖
2021-09-27 16:52:18
表面的三維信息和由攝像機成像的幾何模型;(3)獲取和發送目標點的坐標視覺定位系統的目標就是為了找出目標物在工業機器人的基礎坐標系上的坐標,然后把攝像機獲得的標定與圖像在工業機器人的基礎坐標系上的坐標聯系起來
2021-11-17 11:27:44
不依賴于標定參照物,僅利用攝像機在運動過程中周圍環境圖像與圖像之間的對應關系來對攝像機進行的標定的方法稱為攝像機自標定方法。目前已有的自標定技術大致可以分為基于主動視覺的攝像機自標定技術、直接求解
2019-06-04 08:00:00
本系統搭建了基于單目視覺的SCARA機器人硬件平臺,并使用圓形供料盤混合投放多種顏色的保險片,利用CCD攝像機獲取保險片的圖像信息,從圖像中提取其輪廓形狀及坐標信息,并利用攝像機參數標定,通過坐標變換得到保險片在機器人坐標系的空間坐標,然后控制SCARA機器人夾爪對保險片工件進行精確定位和抓取。
2019-06-19 06:30:00
參數在計算機標定的時候計算出來即可,其矩陣表示如下: 以上就是整個攝像機標定的基本原理和相關概念,在機器3D視覺計算中,先要通過標定確定這些參數,通常的做法是通過一些包含了非常明顯的圖案樣本(棋盤
2018-09-28 10:32:24
利用LABVIEW視覺模塊完成攝像機標定,一般需要哪些vi?相關參數怎么設置?
2015-05-17 17:24:58
在機器視覺應用中,標定板的使用非常必要,因為對于精度測量來講,鏡頭本身的畸變不可避免,同時又需要達到客戶滿意的精度,因此要求本身的圖像就非常真實、準確,否則軟件水平再高,那也是基于有誤差的圖像
2022-02-25 09:55:55
光學標定板應用領域宏誠光學玻璃系列標定板和陶瓷系列標定板是專為高校實驗、研究單位項目研發和機器視覺集成商產品標定等等客戶群體使用的常用標定工具,能夠方便獲得相機的標定數據。標定板作用:為校正鏡頭畸變
2022-09-20 08:14:32
研究自適應卡爾曼濾波技術在平臺自標定數據處理中的應用. 方法 對平臺標定中數據處理的一種方法是對角度傳感器輸出分析, 解算出漂移角速率, 并在此基礎上辨識出漂移參數.
2009-07-09 14:12:26 12
12 研究了自適應卡爾曼濾波技術在平臺射前自標定數據處理中的應用,標定采用四位置標定方法,對角度傳感器輸出建立常速度模型。在噪聲統計未知或時變的情況下,每個位置采用自適
2009-07-10 08:58:5025 在計算機視覺中,二維計算機坐標和三維物體空間坐標的關系可通過攝像機模型來建立。模型中的參數包括:攝像機幾何、光學特性參數(內參數)及攝像機空間位置參數(外參
2009-08-05 15:29:1641 本文給出了robocup 中型組足球比賽機器人在全維視覺情況下,對足球比賽中目標定位的一種方法。文中推導了一種針對全向攝像機鏡面投影的變換關系,該方法簡單有效,為全維
2009-08-14 09:37:3921 本文給出了robocup 中型組足球比賽機器人在全維視覺情況下,對足球比賽中目標定位的一種方法。文中推導了一種針對全向攝像機鏡面投影的變換關系,該方法簡單有效,為全維
2009-08-14 09:38:448 天津機器視覺非標定制,天津計算機視覺,芯片分選檢測機全自動上下料、分選芯片
2023-02-21 10:26:40
基于視覺系統的移動機器人導航技術是近年來移動機器人研究領域的一個熱點,而攝像機標定是視覺系統的基礎,它建立了攝像機系統尺寸(像素)和已知的三維世界坐標系系統
2010-01-20 14:08:3738 視覺傳感器的標定技術
雙目視覺傳感器由兩臺性能相同的面陣CCD攝像機組成,基于立體視差的原理,可完
2009-11-07 11:42:012245 利用機器視覺的攝像機標定方法研究
機器視覺的基本任務之一是從攝像機獲取圖像信息并計算三維空間中物體的幾何信息,以由此重建和識別物體。而空間物體表面某
2010-03-04 10:04:541255 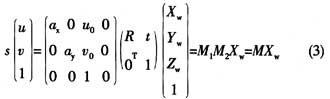
以簡化以往的攝像機標定技術為研究目的,分析了標定算法對于前期圖像處理的要求,給出了基于MATLAB 的簡易 攝像機 標定方法。該方法借助于常用軟件完成了以往攝像機的標定算法中的
2011-06-13 15:52:4039 采用直線對應法和基于最小二乘的標定方法對攝像機和光刀進行標定,設計并實現了三維掃描儀系統的標定,經試驗表明,此方法簡單易行,計算結果精度高,對數據測量的精確性和可
2011-10-10 10:38:4818 提出了基于平面單應性矩陣的攝像機標定算法,通過攝像機標定對檢測區域進行網格劃分,從而進行車輛速度的檢測。經實驗測試,該方法易于實現,且具有較高的檢測精度,平均測速準確率
2011-11-10 14:35:3651 首先介紹了B-dual-space的概念和基本性質;并將B-dual-space與張正友的平板標定法相結合,提出了改進型的平面標定算法,這一方法繼承了張的方法中二階畸變模型的使用,相較Tsai的方法畸變模
2011-11-30 17:17:3618 提出了一種改進標定法.該方法采用分步標定的思想,以創建的平面模板為標定物,利用共面點便可線性求解出攝像機的內外參數.建立的攝像機模型考慮了徑向畸變,有利于提高標定精度
2012-04-26 15:29:2328 介紹了一種線性模型下的攝像機標定方法。在獲取交通視頻的基礎上,利用實際路面上的參照物和圖像處理的基本知識抽象出交通視頻中的像素行和路面實際距離之間的幾何模型,對幾
2012-05-28 16:26:4743 本文介紹了一種線性模型下的攝像機標定方法。在獲取交通視頻的基礎上,利用實際路面上的參照物和圖像處理的基本知識抽象出交通視頻中的像素行和路面實際距離之間的幾何模型,
2012-05-29 16:58:1283 在機器視覺應用中,標定板的使用非常必要,因為對于精度測量來講,鏡頭本身的畸變不可避免,同時又需要達到客戶滿意的精度,因此要求本身的圖像就非常真實、準確,否則軟件水
2012-12-10 11:53:492383 基于B-dual-space的攝像機標定
2015-11-18 16:40:220 本文CameraCalibrator類源代碼來自于OpenCV2 計算機視覺編程手冊(Robert Laganiere 著 張靜 譯) 強烈建議閱讀機器視覺學習筆記(4)——單目攝像機標定參數
2017-02-08 03:36:381195 )——單目攝像機標定參數說明? 機器視覺學習筆記(5)——基于OpenCV的單目攝像機標定? 機器視覺學習筆記(6)——雙目攝像機標定參數說明 1.雙目攝像機標定目的 雙目攝像機標定最主要的目的就是要得出左右兩個攝像機的相對位置關系,但是在OpenCV中,計算表示左右攝像機位置的矩陣R和T的同時,也可
2017-02-08 03:41:121239 Dragoboard410c開發板為平臺進行簡單的3D視覺實驗,這里我們將涉及到3D視覺中的攝像機標定、姿勢估計、對極集合和3D圖像中的深度地圖等內容。
2017-02-15 10:11:221976 混合攝像機視覺伺服機器人研究與應用_陳丹
2017-03-19 19:07:040 攝像機標定是機器視覺和攝像測量領域相對基礎的工作,同時也是最復雜、困難的T作。攝像機標定的意義是得到立體空間中對象的幾何信息,其中所使用的圖像信息由雙目攝像機所得。定后的雙目攝像機得到的圖像目標信息
2017-11-06 14:41:0530 問題,、提出一種基于雙目視覺的投影儀標定算法,將投影儀視為逆向相機,利用一個輔助相機捕獲投影于不同位置標定平面,確立攝像機圖像與標定平面之間的對應關系,然后利用極線原理得到攝像機圖像與投影儀圖像之間的對應關
2017-11-06 15:30:2120 使用LabVIEW和用于DENSO的ImagingLab Robotics庫,機器視覺和機器人系統可以集成在一個應用程序中。本文介紹了使用相同坐標系統在機器視覺系統和機器人系統之間進行標定的方法
2017-11-17 17:03:2514011 攝像機標定是三維重建時的必要步驟。傳統的標定方法對設備要求高、操作繁瑣,而自標定方法雖然簡便,但精度不高,會嚴重影響三維重建的效果。因此,越來越需要一種操作簡便并且精度高的自標定方法。采用SIFT
2017-11-21 15:01:163 針對自由雙目立體視覺中由于攝像機旋轉導致的攝像機外參數變化的問題,提出一種基于旋轉軸標定的動態外參數獲取方法。在多個不同位置,立體標定得到多組旋轉平移矩陣,利用最小二乘法求解旋轉軸參數;結合初始位置
2017-11-25 11:27:150 針對目前基于視頻的車輛測速方法均需通過手工標定而造成的低效和可操作性差的問題,提出了一種對典型配置的道路監控攝像機的焦距、俯仰角、離地距離等重要參數進行自動標定的方法。首選利用自然場景中兩組正交
2017-11-29 16:47:580 針對無人車(UGV)自主跟隨目標車輛檢測過程中需要對激光雷達(LiDAR)數據和攝像機圖像進行信息融合的問題,提出了一種基于梯形棋盤格標定板對激光雷達和攝像機進行聯合標定的方法。首先,利用激光雷達在
2017-11-30 16:23:127 我們首先介紹下計算機視覺領域中常見的三個坐標系:圖像坐標系,相機坐標系,世界坐標系。以及他們之間的關系。然后介紹如何使用張正友相機標定法標定相機。攝像機標定(Camera calibration)簡單來說是從世界坐標系換到圖像坐標系的過程,也就是求最終的投影矩陣的過程。
2017-12-04 16:56:3519087 
可選參數進行攝像機標定的程序。calibration_artificial.cpp 是程序模擬模擬攝像機標定的過程,即程序創建棋盤然后自主標定。
2017-12-04 17:23:263938 
為提高場景攝像機的標定精度和標定效率,本文利用攝像機透鏡成像原理,基于針孔成像模型,提出了一種基于單幅二維圖像的攝像機標定方法。該方法利用最小二乘法直接計算世界坐標系與計算機圖像坐標系之間的數學模型
2017-12-15 11:04:185 數字攝像機包括目前市場上主流的有三種產品:網絡攝像機,SDI攝像機,網線通攝像機。網絡高清攝像機主要由視頻采集、視頻編碼、網絡傳輸等幾部分組成。網絡高清攝像機與模擬攝像機相比,在清晰度方面,700線
2018-01-02 15:39:1611172 針對現有的線結構光視覺測量系統現場標定方法存在效率低、操作復雜等不足,提出了一種基于自由移動平面靶標的標定方法。該方法以平面靶標作為標定對象,首先采用張正友的方法標定出了攝像機內部參數,然后引入了線
2018-03-15 11:22:314 雙目立體視覺中在對物體進行三維測量或精準定位時,需要對攝像機進行標定以獲得其內外參數。研究徑向畸變攝像機模型,構造了基于一階徑向畸變( RAC)算法的雙目攝像機內外參數線性求解公式。考慮側傾角、旋轉
2018-12-27 17:04:5211 在機器視覺的測量中,我們得到的尺寸并不是我們真實的物體尺寸,而是像素值,那么如何將像素值轉成我們需要表示的實際物體尺寸,此時,需要進行坐標的標定。
2018-12-29 13:56:334848 相機標定可以說是計算機視覺/機器視覺的基礎,但是初學者不易上手,本文將給讀者整理一遍相機標定的邏輯,并在文末回答評論區提出的問題。分為以下內容:
2019-06-01 09:54:155154 
建立攝像機的模型,在Tsai方法基礎上,改進算法,對攝像機的內、外部參數進行了標定。試驗結果表明,該方法明顯好于傳統的Tsai方法,可以準確得到水平方向不確定比例因素s。再結合Tsai方法,可以準確獲得其余的標定參數。
2019-10-31 16:20:055 攝像機通過成像透鏡將三維場景投影到攝像機二維像平面上,這個投影可用成像變換(即攝像機成像模型)來描述。攝像機成像模型分為線形模型和非線性模型。針孔成像模型就屬于線形攝像機模型,本文就討論在這種模型下
2020-07-31 09:49:281748 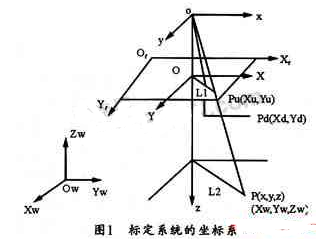
采用張正友提出的基于2D平面棋盤格的攝像機標定方法,利用Matlab攝像頭標定工具完成相機參數的標定。
2020-08-31 10:04:125849 
常見的機器人視覺伺服中要實現像素坐標與實際坐標的轉換,首先就要進行標定,對于實現視覺伺服控制,這里的標定不僅包括攝像機標定,也包括機器人系統的手眼標定。
2020-09-10 16:40:234748 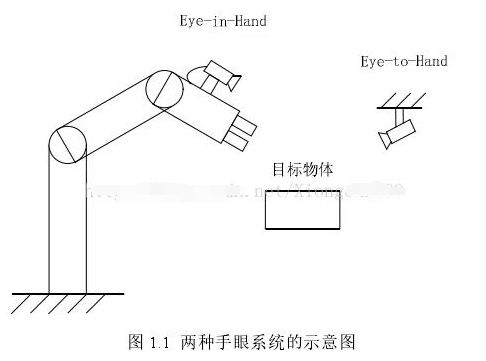
但是在實際應用中并非如此,我們無法嚴格控制像平面和被測平面的位置,所用的鏡頭也不是嚴格的小孔模型。如果直接使用【1】式計算將會產生極大的誤差。因此,為了獲取更高的測量精度,我們需要通過標定來實現坐標平面的轉換以及圖像的校正。
2020-11-03 09:42:2817827 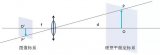
法需要的高精度標定物的缺點,而僅需使用一個打印出來的棋盤格就可以。同時也相對于自標定而言,提高了精度,便于操作。因此張氏標定法被廣泛應用于計算機視覺方面。 ? ? ? ?? 張正友標定法的標定板 今天,我們就來講解一下張
2020-12-31 10:06:197407 
相機固定不動, 上往下看引導機器人移動 機器人與視覺標定理論詳解 1.相機非線性校正使用標定板做非線性校正2.相機與機器人做9點標定可以使用機器人扎9個點,或者機器人抓住工件擺放9個位置,得到9個
2021-05-27 14:15:534610 
在大多數條件下,這些參數必須通過實驗與計算才能得到。無論是在圖像測量或者機器視覺應用中,相機參數的標定都是非常關鍵的環節,其標定結果的精度及算法的穩定性直接影響相機工作產生結果的準確性。
2022-06-21 11:12:349143 文中提出的方法介于傳統標定法和自標定法之間,但克服了傳統標定法需要的高精度標定物的缺點,而僅需使用一個打印出來的棋盤格就可以。同時也相對于自標定而言,提高了精度,便于操作。因此張氏標定法被廣泛應用于計算機視覺方面。
2022-08-22 10:07:234050 文章提出一種基于單應性變換原理的交通監測毫米波雷達與攝像頭標定方法,該方法只需提取交通監測場景中目標在兩傳感器中對應的坐標點對就能解算出傳感器間的轉換關系。相比傳統方法對攝像頭內參數、傳感器自身以及傳感器
2022-10-27 14:15:113632 攝像機通過成像透鏡將三維場景投影到攝像機二維像平面上,這個投影可用成像變換(即攝像機成像模型)來描述。攝像機成像模型分為線形模型和非線性模型。針孔成像模型就屬于線形攝像機模型,本文就討論在這種模型下
2022-11-07 15:22:341664 首先,激光器投射結構光平面到平面棋盤格上形成激光條紋,并通過CCD 攝像機采集激光條紋圖像。然后,對圖像進行處理,提取激光條紋上的兩個特征點。控制機器人按照一定的約束進行運動,從一個標定位置移動
2022-11-09 10:26:093088 結構光視覺傳感器參數的標定包括:攝像機參數標定、結構光平面參數標定。
2022-11-09 10:05:562396 法需要的高精度標定物的缺點,而僅需使用一個打印出來的棋盤格就可以。同時也相對于自標定而言,提高了精度,便于操作。因此張氏標定法被廣泛應用于計算機視覺方面。
2022-11-14 10:14:405014 一個攝像機可以大致分為三個部分:鏡頭 、感光元件(CCD和CMOS)、處理電路。當光線透過鏡頭,會在感光元件上形成一個物體的“像”。(小孔成像原理,不懂得自行百度)然后經過一系列處理就變成了電子版
2022-12-08 14:29:112941 相機畸變是影響相機標定精度的關鍵因素。由于畸變補償不準確,傳統的標定方法不能滿足要求較高標定精度的測量系統的要求。本文提出了一種基于迭代畸變補償算法的新型相機標定方法。相機的初始參數由全場相機像素
2023-01-05 10:18:322241 在圖像測量過程以及機器視覺應用中,為確定空間物體表面某點的三維幾何位置與其在圖像中對應點之間的相互關系,必須建立相機成像的幾何模型,這些幾何模型參數就是相機參數。在大多數條件下這些參數必須通過實驗與計算才能得到,這個求解參數的過程就稱之為相機標定(或攝像機標定)。
2023-01-10 10:59:042684 背景介紹 準確標定像機對于所有的機器/計算機視覺的成功應用都是非常重要的。然而,對于標定板,有不同的模式可供選擇。為了方便進行選擇,本文將解釋每種方法的主要好處。 ? 標定板的選擇,有CharuCo
2023-01-17 15:13:591407 常見的機器人視覺伺服中要實現像素坐標與實際坐標的轉換,首先就要進行標定,對于實現視覺伺服控制,這里的標定不僅包括攝像機標定,也包括機器人系統的手眼標定。 以常見的焊接機器人系統為例,有兩種構型。
2023-02-06 15:24:211955 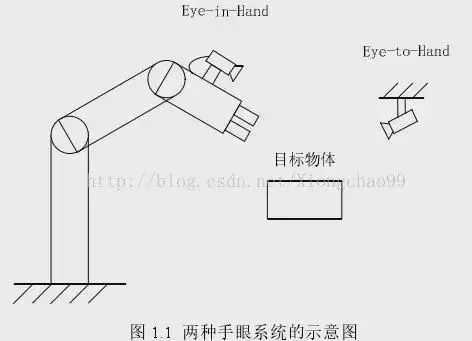
由于OpenCV中cvStereoCalibrate總是會得到很夸張的結果(見下文5.1問題描述),所以最后還是決定用Bouguet的Matlab標定工具箱立體標定,再將標定的結果讀入OpenCV,來進行后續圖像校準和匹配。
2023-03-21 10:17:282148 一、為什么要進行攝像機標定 隨著機器視覺的迅猛發展,我們已經不滿足于使用攝像機進行監控、抓拍這種較為簡單的功能。更多的用戶青睞于它在非接觸三維尺寸測量上的應用。我們所謂的三維測量是廣義的三維測量
2023-06-19 10:57:042495 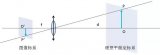
一、為什么要進行攝像機標定 隨著機器視覺的迅猛發展,我們已經不滿足于使用攝像機進行監控、抓拍這種較為簡單的功能。更多的用戶青睞于它在非接觸三維尺寸測量上的應用。我們所謂的三維測量是廣義的三維測量
2023-06-20 11:00:033218 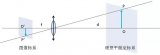
標定概述 我們先看一張圖,做過調試的同學額應該很熟悉,出問題了,要實車調試,我們帶著電腦和canoe下去調試了。只不過這張圖是講標定的,我們通過can或者以太網接口卡,把標定參數刷到我的Ecu中
2023-07-30 16:15:012344 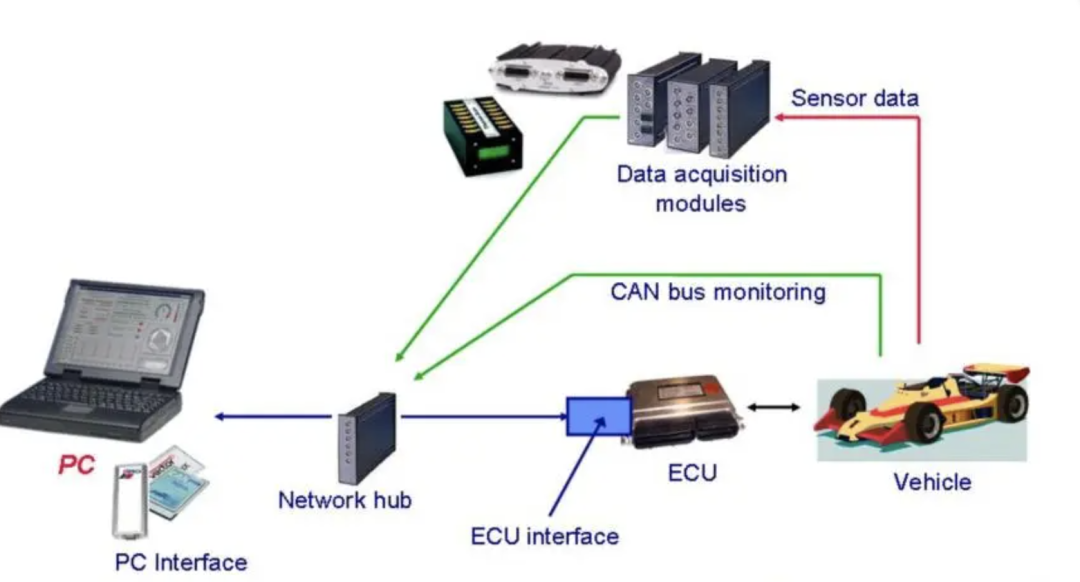
在大多數條件下,這些參數必須通過實驗與計算才能得到。無論是在圖像測量或者機器視覺應用中,相機參數的標定都是非常關鍵的環節,其標定結果的精度及算法的穩定性直接影響相機工作產生結果的準確性。
2023-08-03 09:38:043496 
張正友標定方法是一種經典的相機標定方法,目前是最受歡迎的方法之一。該方法通過一種機器學習的方法,利用大量匹配的數據點像素坐標、世界坐標,基于極大似然估計擬合得到一個最優解。
2023-08-03 10:59:121974 
常見的機器人視覺伺服中要實現像素坐標與實際坐標的轉換,首先就要進行標定,對于實現視覺伺服控制,這里的標定不僅包括攝像機標定,也包括機器人系統的手眼標定。
2023-08-04 11:48:471329 
對于攝像機標定問題已提出了很多方法,攝像機標定的理論問題已得到較好的解決,對攝像機標定的研究來說,當前的研究工作應該集中在如何針對具體的實際應用問題,采用特定的簡便、實用、快速、準確的標定方法。
2023-08-04 12:54:174112 
機器人標定技術是提高機器人末端絕對定位精度的重要方法。可分為三個層次:一是關節級標定,二是機器人運動學標定,三是機器人動力學標定。
2023-09-15 09:49:523966 
利用本質矩陣和基本矩陣的攝像機標定方法;利用主動系統控制攝像機作特定運動的自標定方法(主動視覺標定方法)。
2023-10-16 11:42:111573 
這個逼近的過程就是「相機標定」,我們用簡單的數學模型來表達復雜的成像過程,并且求出成像的反過程。標定之后的相機,可以進行三維場景的重建,即深度的感知,這是計算機視覺的一大分支。
2023-10-18 17:00:071636 
空間物體表面某點的三維幾何位置與其在圖像中對應點之間的相互關系是由攝像機成像的幾何模型決定的,這些幾何模型參數就是攝像機參數,為了得到這些參數而進行的實驗與計算的過程稱為攝像機標定。
2023-10-19 17:31:561872 
空間物體表面某點的三維幾何位置與其在圖像中對應點之間的相互關系是由攝像機成像的幾何模型決定的,這些幾何模型參數就是攝像機參數,為了得到這些參數而進行的實驗與計算的過程稱為攝像機標定。
2023-11-03 11:07:582529 
那么什么是標定呢?標定(calibration)包含兩方面的意思:一是指使用標準的計量儀器對所使用儀器或設備的準確度(精度)進行檢測,確認是否符合標準;二是校準,消除誤差。
2023-11-10 10:09:034562 
作為無人車以及智能機器人而言,在裝配過程中各個傳感器之間的外參標定一直是比較頭疼的問題。這里作者也系統的學習了一下,傳感器的外參標定和在線標定問題。
2023-11-20 15:45:051812 
攝像機是機器視覺系統中的一個關鍵組件,其最本質的功能就是將光信號轉變成為有序的電信號。選擇合適的攝像機也是機器視覺系統設計中的重要環節,攝像機的不僅是直接決定所采集到的圖像分辨率、圖像質量等,同時也與整全系統的運行模式直接相關。
2024-01-19 09:23:371321 
上周,我們發布了視覺大模型系列攝像機,其中有大模型加持的周界系列攝像機,誤報率下降90%以上。
2025-03-11 18:12:381664
 電子發燒友App
電子發燒友App











 工商網監
工商網監
評論