伺服電機(jī)的運(yùn)行需要一個(gè)參考點(diǎn),這個(gè)參考點(diǎn)就是原點(diǎn)。原點(diǎn)通常是由光電開(kāi)關(guān)或機(jī)械開(kāi)關(guān)來(lái)確定的,其位置是固定的。當(dāng)伺服電機(jī)運(yùn)行時(shí),控制器會(huì)根據(jù)原點(diǎn)的位置來(lái)計(jì)算電機(jī)的位置。如果沒(méi)有原點(diǎn),控制器就無(wú)法確定電機(jī)的位置,從而無(wú)法精確地控制機(jī)器的運(yùn)動(dòng)。
2025-07-26 09:43:40 3021
3021 
1200PLC控制伺服電機(jī)沒(méi)有原點(diǎn)傳感器可以回零嗎?
2023-03-30 16:40:53
1500走EPOS模式控制V90增量式編碼器電機(jī),限位和原點(diǎn)能直接接伺服驅(qū)動(dòng)上嗎?為什么回原點(diǎn)是碰到限位是伺服回報(bào)警,可以設(shè)置成碰到限位反轉(zhuǎn)的回原點(diǎn)方式嗎
2024-01-09 12:31:28
伺服電機(jī)原點(diǎn)位置在運(yùn)行一段時(shí)間后為什么會(huì)發(fā)生偏移?這是什么原因呢?如何去解決呢?
2021-06-28 07:25:14
伺服電機(jī)原點(diǎn)位置在運(yùn)行一段時(shí)間后發(fā)生偏移怎么解決?
2021-09-28 09:21:28
最近發(fā)現(xiàn)友友們有時(shí)候會(huì)遇到開(kāi)機(jī)前伺服電機(jī)不能回原點(diǎn)或者回原點(diǎn)過(guò)程需要相當(dāng)長(zhǎng)的時(shí)間而且原點(diǎn)位置不對(duì)的問(wèn)題。造成以上原因主要有以下幾點(diǎn):1.編碼器有問(wèn)題,更換編碼器。2.有點(diǎn)位近接開(kāi)關(guān)的靈敏度有問(wèn)題。3.在伺服器里面把參數(shù)清0。
2021-10-14 17:06:40
伺服電機(jī)的電子齒輪比到底是什么?伺服電機(jī)電子齒輪比怎么設(shè)置?
2021-09-28 06:07:20
伺服驅(qū)動(dòng)器與伺服電機(jī)怎么連接?如何實(shí)現(xiàn)伺服驅(qū)動(dòng)器的基本控制?
2021-09-28 08:29:01
脈沖與限位器原點(diǎn)開(kāi)關(guān)之間的關(guān)系。圖 1 回零過(guò)程圖原點(diǎn)回零模式用于尋找機(jī)械原點(diǎn), 并定位機(jī)械原點(diǎn)與機(jī)械零點(diǎn)的位置關(guān)系。原點(diǎn)回零成后, 電機(jī)停止位置為機(jī)械原點(diǎn)(HomePosition), 通過(guò)設(shè)置 607...
2021-09-03 07:55:24
原點(diǎn)設(shè)置在setup----change drawing Origin如圖10-1原點(diǎn)設(shè)置界面所示,然后鼠標(biāo)左鍵在PCB上點(diǎn)擊放置在你需要設(shè)置的地方。圖10-1原點(diǎn)設(shè)置
2018-11-20 17:44:05
及坐標(biāo)軸方向。可以在 “偏好設(shè)置 -> PCB 編輯器 -> 原點(diǎn)和軸” 頁(yè)面進(jìn)行設(shè)置。顯示原點(diǎn)有三種選擇:
頁(yè)面原點(diǎn)(默認(rèn))
鉆孔/放置文件原點(diǎn)
網(wǎng)格原點(diǎn)
雖然邏輯上可以
2023-06-14 14:00:49
PLC控制伺服電機(jī)找原點(diǎn)的方法是什么?
2021-09-29 07:16:34
西門子V90伺服用FB284塊的EPOS模式,回零完成后,一跑絕對(duì)定位就會(huì)丟失原點(diǎn)(Axisref變成False),沒(méi)有報(bào)警代碼。跑點(diǎn)動(dòng)則不會(huì)丟失原點(diǎn)。請(qǐng)問(wèn)這種情況應(yīng)該怎么解決?
2023-06-12 16:49:37
本人新手,正學(xué)lv運(yùn)動(dòng)卡控制,這方面資料很少,特別是原點(diǎn)搜索的具體過(guò)程,找不到資料。OMRON PLC原點(diǎn)搜索是先搜索到原點(diǎn)接近感應(yīng)開(kāi)關(guān)后,再檢測(cè)到Z相脈沖或原點(diǎn)感應(yīng)開(kāi)關(guān),此點(diǎn)即為伺服原點(diǎn)。但不
2017-06-08 21:40:35
答:做封裝時(shí)設(shè)置原點(diǎn),主要是為了方便設(shè)計(jì)和生產(chǎn)。它的主要作用有以下幾點(diǎn)。(1)制作封裝時(shí),一般都需要取一個(gè)參考位置放置焊盤,此時(shí)原點(diǎn)可以當(dāng)作參考位置。(2)在PCB設(shè)計(jì)時(shí),可以將原點(diǎn)當(dāng)做一個(gè)參考位置
2021-07-03 16:18:09
三菱伺服電機(jī)轉(zhuǎn)矩模式怎么設(shè)置?
2021-09-30 08:08:19
在一條絲桿的中間安裝一個(gè)原點(diǎn)感應(yīng)器,只有這一個(gè),這樣用PLC找原點(diǎn)比較合適,因?yàn)楣ぷ鲿r(shí)是會(huì)原點(diǎn)上下都去的,用普通原點(diǎn)復(fù)歸在異常斷電時(shí),如果在原點(diǎn)另一邊則會(huì)找不到原點(diǎn)可以自己寫一個(gè)會(huì)原點(diǎn)程序,向前走
2021-06-28 07:22:52
脈沖與限位器原點(diǎn)開(kāi)關(guān)之間的關(guān)系。圖 1 回零過(guò)程圖原點(diǎn)回零模式用于尋找機(jī)械原點(diǎn), 并定位機(jī)械原點(diǎn)與機(jī)械零點(diǎn)的位置關(guān)系。原點(diǎn)回零成后, 電機(jī)停止位置為機(jī)械原點(diǎn)(HomePosition), 通過(guò)設(shè)置 607Ch, 可以設(shè)定機(jī)械原點(diǎn)與機(jī)械零點(diǎn)(ZeroPosi.
2021-06-28 10:04:46
基于DS402協(xié)議的伺服電機(jī)原點(diǎn)回零模式怎么實(shí)現(xiàn)?
2021-09-30 06:29:57
如何實(shí)現(xiàn)伺服電機(jī)轉(zhuǎn)動(dòng)固定角度呢?然后又停下來(lái)?
2021-09-24 06:37:51
伺服電機(jī)驅(qū)動(dòng)器的作用是什么?如何實(shí)現(xiàn)高精度且高定位來(lái)控制伺服電機(jī)?
2021-10-12 13:01:01
verilog是如何實(shí)現(xiàn)伺服電機(jī)控制的?
2021-09-24 12:29:32
伺服電機(jī)的基本概念是什么?如何去實(shí)現(xiàn)伺服電機(jī)的串口通訊?
2021-09-26 09:06:19
此狀態(tài)。在伺服電機(jī)上:設(shè)置控制方式;設(shè)置使能由外部控制;編碼器信號(hào)輸出的齒輪比;設(shè)置控制信號(hào)與電機(jī)轉(zhuǎn)速的比例關(guān)系。一般來(lái)說(shuō),建議使伺服工作中的最大設(shè)計(jì)轉(zhuǎn)速對(duì)應(yīng)9V的控制電壓。比如,山洋是設(shè)置1V電壓對(duì)應(yīng)
2015-12-29 11:12:23
關(guān)于伺服回原.我使用三菱PLC控制一個(gè)臺(tái)達(dá)伺服系統(tǒng)與一個(gè)步進(jìn)系統(tǒng), 通過(guò)臺(tái)達(dá)HMI界面做一些操作.為了方便使用, 想在出現(xiàn)異常時(shí), 可以快速排除后一鍵回原點(diǎn), 而不需要手動(dòng)移動(dòng)電機(jī)到原點(diǎn)的一側(cè).這個(gè)
2021-06-28 12:17:10
控制伺服電機(jī)的FB塊怎么實(shí)現(xiàn)伺服的上電?
2021-09-28 06:08:52
步進(jìn)伺服電機(jī)回原點(diǎn)的常用方法是什么?
2021-09-29 07:18:40
://wenku.baidu.com/view/7987d89a51e79b89680226f1.html2、步進(jìn)電機(jī)如何回原點(diǎn)?----http://www.ymmfa.com/read-gktid-1556143.html3、步進(jìn)電機(jī)怎么找原點(diǎn) 有沒(méi)有圖或程序呢----
2021-07-08 09:35:40
但是實(shí)找零的方法有很多種,步進(jìn)伺服電機(jī)自身可以完成,上位機(jī)配合也可以完成,下面就來(lái)介紹下回原點(diǎn)的常見(jiàn)方法有以下幾種。一、步進(jìn)伺服電機(jī)在工作的時(shí)候,處于一直轉(zhuǎn)動(dòng)的狀態(tài),但當(dāng)它碰到原點(diǎn)開(kāi)關(guān)的時(shí)候,伺服
2021-06-28 08:52:50
求大神分享伺服電機(jī)的幾種常用模式及控制模式的設(shè)置
2021-09-27 09:01:24
是否有損壞現(xiàn)象,注意每個(gè)伺服電機(jī)都有一個(gè)緩沖膠塊,要保證此緩沖部件完整,否則可能會(huì)損壞伺服電機(jī)定子。另外檢查是否有人修改齊頭鋸機(jī)構(gòu)的線點(diǎn),在保證伺服電機(jī)原點(diǎn)正確的情況下,可以逐步微調(diào)伺服電機(jī)回程和加
2016-01-08 14:45:25
我遇到一個(gè)問(wèn)題就是拿到一個(gè)伺服電機(jī)看不到內(nèi)部結(jié)構(gòu)但是知道它引出來(lái)的幾條線所對(duì)應(yīng)的接口(如圖),商家說(shuō)要自己編寫程序來(lái)控制電機(jī)實(shí)現(xiàn)伺服功能。但是我對(duì)電機(jī)是啥都不懂 希望有大神給點(diǎn)指點(diǎn)謝謝!!!
2019-01-10 11:31:40
請(qǐng)問(wèn)一體化伺服電機(jī)編碼器值清零或設(shè)置原點(diǎn)如何操作?
2021-09-26 07:11:13
請(qǐng)問(wèn)如何實(shí)現(xiàn)一鍵伺服回原點(diǎn)?
2021-10-13 06:30:34
由PLC與伺服電機(jī)組成一個(gè)系統(tǒng),通過(guò)PLC控制伺服電機(jī),實(shí)現(xiàn)機(jī)構(gòu)的原點(diǎn)回歸、相對(duì)定位和絕對(duì)定位功能
2017-11-13 06:01:0033478 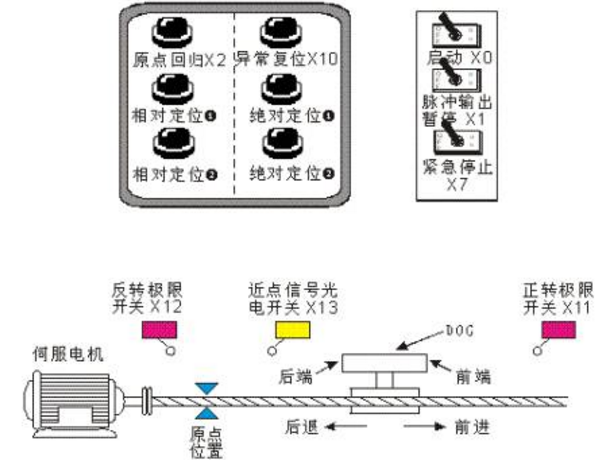
一般來(lái)說(shuō),伺服電機(jī)的編碼器有兩種,絕對(duì)值編碼器和相對(duì)值編碼器。絕對(duì)值編碼器斷電可以保持,只要電池還有電,是不需要尋原點(diǎn)的;相對(duì)編碼器由于斷電后會(huì)丟失電機(jī)多圈數(shù)值,故需要尋原點(diǎn)操作。
2018-02-05 09:09:3425742 伺服電機(jī)是在伺服系統(tǒng)中控制機(jī)械元件運(yùn)轉(zhuǎn)的發(fā)動(dòng)機(jī),是一種補(bǔ)助馬達(dá)間接變速裝置。伺服電機(jī)是可以連續(xù)旋轉(zhuǎn)的電-機(jī)械轉(zhuǎn)換器。作為液壓閥控制器的伺服電機(jī),屬于功率很小的微特電機(jī)。伺服電機(jī)分為直流伺服電機(jī)和交流伺服電機(jī),以永磁式直流伺服電機(jī)和并激式直流伺服電機(jī)最為常用。
2018-04-02 15:47:2357142 因?yàn)椋?b class="flag-6" style="color: red">伺服電機(jī)本身具備發(fā)出脈沖的功能,所以伺服電機(jī)每旋轉(zhuǎn)一個(gè)角度,都會(huì)發(fā)出對(duì)應(yīng)數(shù)量的脈沖,這樣,和伺服電機(jī)接受的脈沖形成了呼應(yīng),或者叫閉環(huán),如此一來(lái),系統(tǒng)就會(huì)知道發(fā)了多少脈沖給伺服電機(jī),同時(shí)又收了多少脈沖回來(lái),這樣,就能夠很精確的控制電機(jī)的轉(zhuǎn)動(dòng),從而實(shí)現(xiàn)精確的定位,可以達(dá)到0.001mm。
2018-04-12 15:06:2614678 伺服電機(jī)是如何實(shí)現(xiàn)精準(zhǔn)定位?如何理解它的閉環(huán)特性?今天我們就來(lái)說(shuō)說(shuō)。
2019-03-01 08:49:3117886 
伺服電機(jī)的使用范圍很多,想要弄清楚伺服電機(jī)會(huì)在什么地方用?那就的從原理上來(lái)說(shuō)一下電機(jī)的功能。
2020-08-25 14:58:0011357 做封裝時(shí)設(shè)置的原點(diǎn),主要為了方便設(shè)計(jì)和生產(chǎn)。它的主要作用有以下幾點(diǎn):
2020-09-14 17:16:196919 在哪幾種情況下會(huì)造成伺服電機(jī)抖動(dòng)?怎樣才能解決這些伺服電機(jī)抖動(dòng)帶來(lái)的問(wèn)題?分別是怎么解決的? 例如:加減速時(shí)間設(shè)置得過(guò)小,伺服電機(jī)在突然的啟動(dòng)或者停止的時(shí)候會(huì)產(chǎn)生高慣性抖動(dòng)......分別把加減
2020-12-22 11:54:3721365 
我們?cè)谑鞘褂?b class="flag-6" style="color: red">伺服電機(jī)的時(shí)候,一定要調(diào)節(jié)好電動(dòng)機(jī)的各種參數(shù)才可以一切正常應(yīng)用。可是針對(duì)一些初學(xué)者小伙伴們,很有可能壓根不清楚調(diào)節(jié)什么參數(shù),取得伺服電機(jī)就一籌莫展,只有借助經(jīng)銷商的技術(shù)性老師傅,如果
2021-06-18 15:59:427875 伺服電機(jī)剛買來(lái)時(shí),為了適應(yīng)工作對(duì)象,還有自己的熟練程度,是需要進(jìn)行設(shè)置和調(diào)試都能繼續(xù)使用的,那么不懂這方面應(yīng)該怎么設(shè)置呢?下面華科星小編來(lái)分享具體的流程。 伺服電機(jī)怎么設(shè)置? 1.復(fù)位主要參數(shù),在
2021-07-11 15:20:4724574 伺服電機(jī)和普通電機(jī)的區(qū)別 “伺服”是“跟隨”控制信號(hào)的意思,伺服電機(jī)能夠做到精準(zhǔn)控制,可以控制讓轉(zhuǎn)多少就轉(zhuǎn)多少,并且它還有反饋裝置,能夠實(shí)現(xiàn)閉環(huán),也就是編碼器能夠反饋是否轉(zhuǎn)到了數(shù)量,所以伺服電機(jī)
2021-08-06 18:18:2559384 什么是伺服驅(qū)動(dòng)器?伺服驅(qū)動(dòng)器是用來(lái)控制伺服電機(jī)的一種控制器,被廣泛應(yīng)用于自動(dòng)化設(shè)備中,那么伺服驅(qū)動(dòng)器一般要設(shè)置哪些參數(shù)?
2022-01-17 10:41:0426386 伺服電機(jī)有兩種編碼器:增量式編碼器和絕對(duì)值式編碼器,絕對(duì)值式編碼器還有單圈絕對(duì)值和多圈絕對(duì)值之分。
2022-10-12 15:19:5926977 編碼器讓電機(jī)實(shí)現(xiàn)了閉環(huán)控制。 那有的朋友就會(huì)說(shuō)了,同樣都是加了編碼器結(jié)構(gòu)的伺服電機(jī),步進(jìn)類型的設(shè)備價(jià)格比永磁同步的低很多,我是不是以后就選步進(jìn)的就行了呢?也不是,步進(jìn)電機(jī)只有在低速條件下才會(huì)有比較大的轉(zhuǎn)矩,轉(zhuǎn)速
2022-11-05 10:15:388205 在伺服電機(jī)上:設(shè)置控制方式;設(shè)置使能由外部控制;編碼器信號(hào)輸出的齒輪比;設(shè)置控制信號(hào)與電機(jī)轉(zhuǎn)速的比例關(guān)系。一般來(lái)說(shuō),建議使伺服工作中的最大設(shè)計(jì)轉(zhuǎn)速對(duì)應(yīng)9V的控制電壓。
2023-01-03 12:51:103092 原因:參數(shù)設(shè)置不太合理,負(fù)載系數(shù)小;運(yùn)行時(shí),無(wú)法克服平衡板的彈力,至使下壓不到位,伺服報(bào)警;
2023-02-09 10:26:244109 松下伺服電機(jī)代理—日弘忠信今天給大家講講松下伺服電機(jī)如何恢復(fù)出廠設(shè)置?伺服電機(jī)恢復(fù)出廠設(shè)置方法。
2023-02-22 11:30:4710284 伺服電機(jī)的使能信號(hào)是控制伺服電機(jī)運(yùn)動(dòng)的重要信號(hào)之一,通過(guò)使能信號(hào)的控制,可以實(shí)現(xiàn)對(duì)伺服電機(jī)的啟動(dòng)和停止。同時(shí),通過(guò)對(duì)使能信號(hào)的設(shè)置和調(diào)試,還可以實(shí)現(xiàn)對(duì)伺服電機(jī)的運(yùn)動(dòng)速度、加速度等參數(shù)的控制,提高
2023-03-03 11:20:4021142 伺服電機(jī)的型號(hào)通常由一串字母和數(shù)字組成,不同廠家的型號(hào)表現(xiàn)形式有所不同。以下是一些常見(jiàn)的伺服電機(jī)型號(hào)表示方法:
型號(hào)中含有電機(jī)的參數(shù):一些廠家的伺服電機(jī)型號(hào)中會(huì)包含電機(jī)的參數(shù),如電壓、功率
2023-03-07 15:10:2118873 直流伺服電機(jī)和交流伺服電機(jī)都是常見(jiàn)的精密控制電機(jī),但它們之間有一些區(qū)別,如下所示:
原理不同:直流伺服電機(jī)是基于直流電源供電的,通過(guò)改變電極之間的磁場(chǎng)來(lái)控制電機(jī)的轉(zhuǎn)速和方向;而交流伺服電機(jī)是基于交流電源供電的,通過(guò)改變電樞中電流的方向和大小來(lái)控制電機(jī)的轉(zhuǎn)速和方向。
2023-03-10 13:46:259894 伺服控制器的參數(shù)設(shè)置涉及到多個(gè)方面,包括電氣參數(shù)、控制參數(shù)、運(yùn)動(dòng)參數(shù)等。下面列舉一些常見(jiàn)的伺服控制器參數(shù)設(shè)置:
電氣參數(shù)設(shè)置:
電機(jī)參數(shù):包括電機(jī)類型、額定電壓、額定電流、額定轉(zhuǎn)速等參數(shù)的設(shè)置和校準(zhǔn)。
驅(qū)動(dòng)器參數(shù):包括電流限制、速度限制、加速度限制等參數(shù)的設(shè)置。
2023-03-12 11:26:3010456 伺服電動(dòng)機(jī)分為直流伺服電機(jī)和交流伺服電機(jī)。直流伺服電機(jī)比較便宜,交流伺服電機(jī)比較常用。
2023-04-04 15:05:452619 所謂定位,就是要讓伺服電機(jī)走到一個(gè)確定的位置。這個(gè)位置可以是增量式的,也可以是絕對(duì)式的。打個(gè)比方,我們現(xiàn)在在路上,我們要往前走 10 米,相當(dāng)于我們的位置要往前增加十米,這個(gè)十米就是一個(gè)位置增量。
2023-05-05 10:13:305303 
零點(diǎn)位置是通過(guò)程序復(fù)位控制回零或者在回零過(guò)程中感應(yīng)到原點(diǎn)限位的時(shí)候,把當(dāng)前位置值清零,表示原點(diǎn)或零點(diǎn),一切位置都是以原點(diǎn)為基礎(chǔ),確定零點(diǎn)位置的時(shí)候,應(yīng)先確定運(yùn)動(dòng)的正向和負(fù)向,以及電機(jī)的實(shí)際運(yùn)動(dòng)方向。
2023-07-24 16:10:3512902 在自動(dòng)化設(shè)備中,經(jīng)常用到伺服電機(jī),特別是位置控制,大部分品牌的伺服電機(jī)都有位置控制功能,通過(guò)控制器發(fā)出脈沖來(lái)控制伺服電機(jī)運(yùn)行,脈沖數(shù)對(duì)應(yīng)轉(zhuǎn)的角度,脈沖頻率對(duì)應(yīng)速度(與電子齒輪設(shè)定有關(guān)),當(dāng)一個(gè)
2023-08-08 08:09:145897 
什么是伺服電機(jī)?伺服是一種電磁裝置,利用負(fù)反饋機(jī)制將電信號(hào)轉(zhuǎn)換為受控運(yùn)動(dòng)。基本上,伺服系統(tǒng)的行為類似于執(zhí)行器,提供對(duì)速度、加速度和線性或角度位置的精確控制。它由四件事組成:直流電機(jī)、位置傳感器、齒輪
2023-08-30 08:08:524873 變頻電機(jī)和伺服電機(jī)的區(qū)別? 變頻電機(jī)和伺服電機(jī)是現(xiàn)代工業(yè)領(lǐng)域中常用的兩種電動(dòng)機(jī)類型。雖然它們都可以實(shí)現(xiàn)電動(dòng)機(jī)的運(yùn)轉(zhuǎn),但在設(shè)計(jì)原理、控制方式以及應(yīng)用范圍等方面存在許多區(qū)別。本文將從這些方面進(jìn)行詳盡
2023-12-08 10:47:383106 本文以松下FP1系列PLC和A4系列伺服驅(qū)動(dòng)為例,編制控制伺服電機(jī)定長(zhǎng)正、反旋轉(zhuǎn)的PLC程序并設(shè)計(jì)外圍接線圖,此方案不采用松下的位置控制模塊FPG--PP11122122等,而是用晶體管輸出式
2023-12-21 10:08:027856 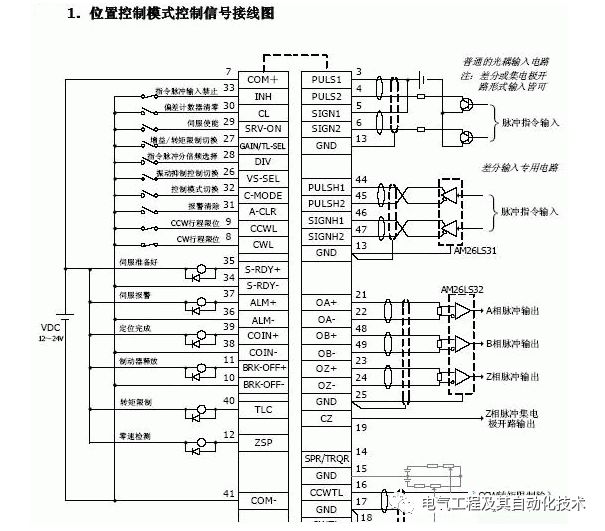
什么是伺服電機(jī)的原點(diǎn)設(shè)置?伺服電機(jī)零點(diǎn)和原點(diǎn)的區(qū)別 伺服電機(jī)的原點(diǎn)設(shè)置,簡(jiǎn)單來(lái)說(shuō),就是確定電機(jī)的起始位置或參考位置。在使用伺服電機(jī)控制系統(tǒng)時(shí),需要將電機(jī)的位置與設(shè)定的參考位置進(jìn)行對(duì)齊,以確保精準(zhǔn)
2023-12-25 13:57:594441 在自動(dòng)化設(shè)備中,經(jīng)常用到伺服電機(jī),特別是方位操控,大部分品牌的伺服電機(jī)都有方位操控功用,經(jīng)過(guò)操控器發(fā)出脈沖來(lái)操控伺服電機(jī)運(yùn)轉(zhuǎn),脈沖數(shù)對(duì)應(yīng)轉(zhuǎn)的角度,脈沖頻率對(duì)應(yīng)速度(與電子齒輪設(shè)定有關(guān)),當(dāng)一個(gè)
2024-01-05 08:39:448509 伺服驅(qū)動(dòng)器是現(xiàn)代工業(yè)自動(dòng)化系統(tǒng)中常用的一種執(zhí)行控制的設(shè)備,它能夠通過(guò)電信號(hào)控制電機(jī)的速度和位置。設(shè)置伺服驅(qū)動(dòng)器的參數(shù)是使用伺服驅(qū)動(dòng)器前必須要進(jìn)行的一項(xiàng)工作,下面將從硬件安裝和軟件配置兩個(gè)方面詳細(xì)介紹
2024-01-11 10:51:138020 伺服電機(jī)原理與應(yīng)用 一、伺服電機(jī)原理 伺服電機(jī)是一種控制系統(tǒng),通過(guò)傳感器接受反饋信號(hào),將輸出信號(hào)與輸入信號(hào)進(jìn)行比較,并通過(guò)控制器對(duì)輸出信號(hào)進(jìn)行調(diào)整,以實(shí)現(xiàn)精確控制電機(jī)運(yùn)動(dòng)的位置、速度和力矩。伺服電機(jī)
2024-01-22 16:32:261979 伺服電機(jī)驅(qū)動(dòng)器是現(xiàn)代工業(yè)控制領(lǐng)域中廣泛應(yīng)用的一種設(shè)備。通過(guò)合理設(shè)置參數(shù),可以實(shí)現(xiàn)電機(jī)的高精度定位、速度控制和力矩控制等功能,提高生產(chǎn)效率和產(chǎn)品質(zhì)量。本文將詳細(xì)介紹伺服電機(jī)驅(qū)動(dòng)器的設(shè)置參數(shù)方法和步驟
2024-01-25 11:36:2213619 伺服電機(jī)是不是也可以改變“相序”來(lái)實(shí)現(xiàn)電機(jī)正反轉(zhuǎn)呢? 伺服電機(jī)是一種常見(jiàn)的電動(dòng)執(zhí)行器,廣泛應(yīng)用于工業(yè)自動(dòng)化、機(jī)器人、CNC機(jī)床等領(lǐng)域。除了控制轉(zhuǎn)速和位置精度外,伺服電機(jī)還可以實(shí)現(xiàn)正反轉(zhuǎn)功能。反轉(zhuǎn)操作
2024-02-18 14:35:297186 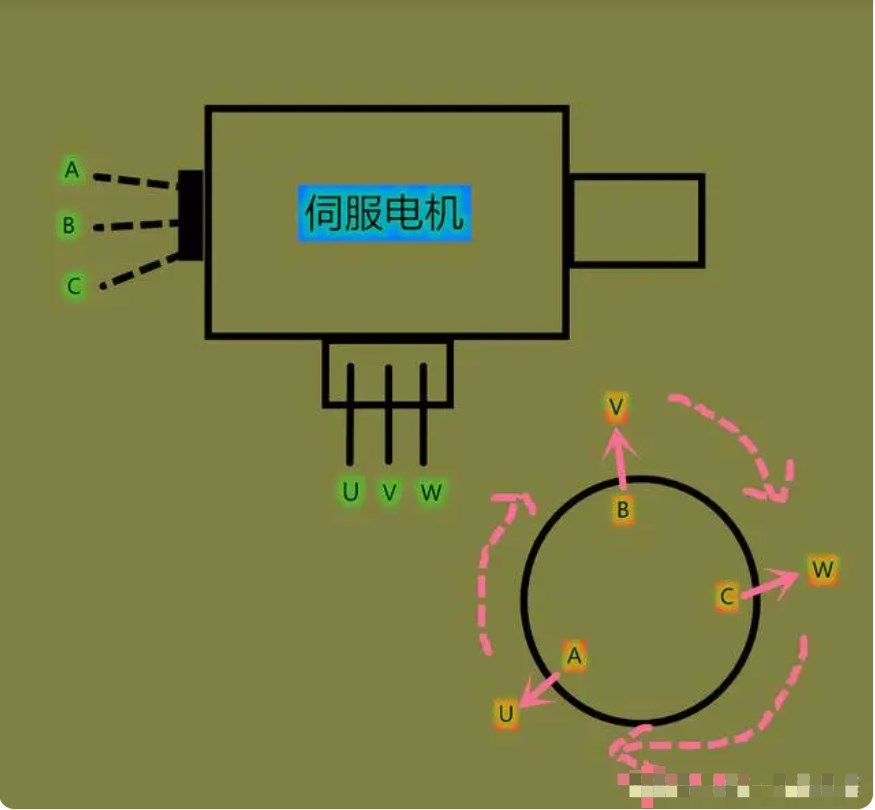
零點(diǎn)位置是通過(guò)程序復(fù)位控制回零或者在回零過(guò)程中感應(yīng)到原點(diǎn)限位的時(shí)候,把當(dāng)前位置值清零,表示原點(diǎn)或零點(diǎn),一切位置都是以原點(diǎn)為基礎(chǔ),確定零點(diǎn)位置的時(shí)候,應(yīng)先確定運(yùn)動(dòng)的正向和負(fù)向,以及電機(jī)的實(shí)際運(yùn)動(dòng)方向。
2024-03-20 14:07:476648 伺服回零的作用 零點(diǎn)位置是通過(guò)程序復(fù)位控制回零或者在回零過(guò)程中感應(yīng)到原點(diǎn)限位的時(shí)候,把當(dāng)前位置值清零,表示原點(diǎn)或零點(diǎn),一切位置都是以原點(diǎn)為基礎(chǔ),確定零點(diǎn)位置的時(shí)候,應(yīng)先確定運(yùn)動(dòng)的正向和負(fù)向,以及電機(jī)
2024-03-23 08:42:1410826 匯川伺服電機(jī)抖動(dòng)問(wèn)題是一個(gè)常見(jiàn)的問(wèn)題,它可能是由多種原因引起的。在解決這個(gè)問(wèn)題時(shí),我們需要對(duì)伺服電機(jī)的參數(shù)進(jìn)行調(diào)整。 一、伺服電機(jī)抖動(dòng)的原因 在調(diào)整參數(shù)之前,我們需要了解伺服電機(jī)抖動(dòng)的原因。伺服電機(jī)
2024-06-05 11:29:4211487 安川伺服驅(qū)動(dòng)器概述 安川伺服驅(qū)動(dòng)器以其高精度、高響應(yīng)速度和高可靠性而受到廣泛贊譽(yù)。它主要由驅(qū)動(dòng)器、伺服電機(jī)和編碼器組成,通過(guò)精確控制電機(jī)的轉(zhuǎn)速和位置,實(shí)現(xiàn)對(duì)機(jī)械系統(tǒng)的精確控制。 2. 參數(shù)設(shè)置前的準(zhǔn)備 在開(kāi)始設(shè)置參數(shù)之
2024-06-06 12:34:098792 在工業(yè)自動(dòng)化和機(jī)器人技術(shù)中,伺服電機(jī)因其高精度、高響應(yīng)速度的特性而得到廣泛應(yīng)用。在某些應(yīng)用場(chǎng)景中,需要兩臺(tái)或多臺(tái)伺服電機(jī)以一定的比例同步運(yùn)行,以滿足特定的工藝或控制需求。本文將詳細(xì)探討如何實(shí)現(xiàn)兩臺(tái)
2024-06-07 12:42:2211685 伺服電機(jī)是一種高精度、高效率的電機(jī),廣泛應(yīng)用于工業(yè)自動(dòng)化、機(jī)器人、精密機(jī)械等領(lǐng)域。伺服電機(jī)的旋轉(zhuǎn)方向是其控制的重要參數(shù)之一,正確設(shè)置旋轉(zhuǎn)方向可以保證系統(tǒng)的穩(wěn)定運(yùn)行和精確控制。本文將詳細(xì)介紹伺服電機(jī)
2024-06-12 10:11:555718 松下伺服電機(jī)是工業(yè)自動(dòng)化領(lǐng)域中常用的一種高精度、高性能的電機(jī),廣泛應(yīng)用于機(jī)器人、數(shù)控機(jī)床、自動(dòng)化生產(chǎn)線等場(chǎng)合。在使用松下伺服電機(jī)時(shí),需要進(jìn)行參數(shù)設(shè)置以滿足不同應(yīng)用場(chǎng)景的需求。本文將詳細(xì)介紹松下伺服
2024-06-12 10:16:576158 松下伺服電機(jī)是一種高性能、高精度的電機(jī),廣泛應(yīng)用于自動(dòng)化設(shè)備、機(jī)器人、數(shù)控機(jī)床等領(lǐng)域。為了實(shí)現(xiàn)對(duì)伺服電機(jī)的精確控制,需要對(duì)速度控制模式進(jìn)行設(shè)置。本文將詳細(xì)介紹松下伺服速度控制模式的設(shè)置方法,包括
2024-06-12 10:30:095304 本文詳細(xì)介紹了Mach3軟件在伺服電機(jī)參數(shù)設(shè)置方面的相關(guān)知識(shí),包括伺服電機(jī)的基本原理、Mach3軟件的安裝與配置、伺服電機(jī)參數(shù)設(shè)置的方法和步驟。 一、伺服電機(jī)基本原理 伺服電機(jī)是一種高精度、高
2024-06-12 14:22:174501 松下伺服驅(qū)動(dòng)器的剛性設(shè)置是其性能調(diào)整中的一個(gè)重要環(huán)節(jié)。剛性設(shè)置的目的是確保伺服電機(jī)在運(yùn)行過(guò)程中能夠提供足夠的力矩,以保證系統(tǒng)的穩(wěn)定性和精度。本文將詳細(xì)介紹松下伺服驅(qū)動(dòng)器剛性設(shè)置的原理、方法和步驟
2024-06-14 10:31:115902 ABB機(jī)器人設(shè)置原點(diǎn)位置信號(hào)是一個(gè)重要的步驟,它可以幫助機(jī)器人準(zhǔn)確地定位和執(zhí)行任務(wù)。 了解原點(diǎn)位置信號(hào)的重要性 原點(diǎn)位置信號(hào)是機(jī)器人編程和操作的基礎(chǔ)。它為機(jī)器人提供了一個(gè)參考點(diǎn),使得機(jī)器人能夠在正確
2024-06-17 09:24:204434 在現(xiàn)代工業(yè)自動(dòng)化系統(tǒng)中,伺服電機(jī)與PLC(可編程邏輯控制器)的協(xié)同控制是實(shí)現(xiàn)高精度、高效率運(yùn)動(dòng)控制的關(guān)鍵技術(shù)。伺服電機(jī)以其高精度、高響應(yīng)速度的特點(diǎn),在定位、速度控制等方面表現(xiàn)出色;而PLC則以其強(qiáng)大
2024-06-24 14:30:453171 伺服驅(qū)動(dòng)器是一種用于控制伺服電機(jī)的設(shè)備,它可以接收來(lái)自控制器的指令,并將指令轉(zhuǎn)換為電機(jī)的轉(zhuǎn)速、位置和扭矩等參數(shù)。為了使伺服驅(qū)動(dòng)器正常工作,需要對(duì)驅(qū)動(dòng)器進(jìn)行一些參數(shù)設(shè)置。以下是一些常見(jiàn)的伺服驅(qū)動(dòng)器
2024-07-13 09:52:558956 引言 伺服電機(jī)是一種將電能轉(zhuǎn)換為機(jī)械能的裝置,具有高精度、高響應(yīng)速度、高穩(wěn)定性等特點(diǎn)。在工業(yè)自動(dòng)化、機(jī)器人、航空航天等領(lǐng)域,伺服電機(jī)被廣泛應(yīng)用于實(shí)現(xiàn)精確的位置、速度和力控制。伺服電機(jī)的轉(zhuǎn)速調(diào)整是實(shí)現(xiàn)
2024-07-14 10:44:473990 在PCB設(shè)計(jì)中,坐標(biāo)原點(diǎn)是一個(gè)非常重要的概念,它決定了PCB布局的起始位置和方向。 一、坐標(biāo)原點(diǎn)的定義 坐標(biāo)原點(diǎn)的概念 在PCB設(shè)計(jì)中,坐標(biāo)原點(diǎn)是一個(gè)參考點(diǎn),用于確定PCB布局的起始位置和方向。坐標(biāo)
2024-09-02 14:45:006160 電子齒輪比(Electronic Gear Ratio)是伺服系統(tǒng)中用于調(diào)整編碼器分辨率和電機(jī)轉(zhuǎn)速之間關(guān)系的參數(shù)。在伺服系統(tǒng)中,電子齒輪比的設(shè)置對(duì)于確保系統(tǒng)性能和精度至關(guān)重要。 基本步驟 了解系統(tǒng)
2024-09-07 09:46:473876 松下伺服電機(jī)慣量比的設(shè)置是一個(gè)相對(duì)復(fù)雜的過(guò)程,需要考慮到負(fù)載的轉(zhuǎn)動(dòng)慣量、電機(jī)的轉(zhuǎn)動(dòng)慣量以及系統(tǒng)的控制需求。以下是一般的設(shè)置步驟和注意事項(xiàng): 一、準(zhǔn)備階段 了解基本概念 : 慣量比是指控制器與電機(jī)
2024-09-07 09:49:285448 伺服電機(jī)是一種高精度的電機(jī),廣泛應(yīng)用于自動(dòng)化控制、機(jī)器人、精密機(jī)械等領(lǐng)域。它能夠根據(jù)輸入的控制信號(hào),精確地控制電機(jī)的轉(zhuǎn)速、位置和力矩,實(shí)現(xiàn)對(duì)機(jī)械系統(tǒng)的精確控制。伺服電機(jī)的工作原理涉及到電機(jī)的構(gòu)造
2024-10-22 10:58:133547 伺服電機(jī)是一種高精度的電機(jī),廣泛應(yīng)用于自動(dòng)化設(shè)備、機(jī)器人、數(shù)控機(jī)床等領(lǐng)域。為了確保伺服電機(jī)的性能和穩(wěn)定性,需要進(jìn)行正確的調(diào)試。以下是一些常見(jiàn)的伺服電機(jī)調(diào)試方法及其操作步驟: 電機(jī)參數(shù)設(shè)置 在調(diào)試伺服
2024-10-22 11:04:574953 補(bǔ)助馬達(dá)間接變速裝置。伺服電機(jī)能夠?qū)㈦妷盒盘?hào)轉(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速,用以驅(qū)動(dòng)控制對(duì)象,從而實(shí)現(xiàn)對(duì)機(jī)械運(yùn)動(dòng)的精確控制。伺服電機(jī)的工作原理可以簡(jiǎn)單概括為:輸入控制信號(hào)→伺服控制器→伺服電機(jī)→輸出運(yùn)動(dòng)。 伺服電機(jī)系統(tǒng)主要由電機(jī)本體、驅(qū)
2024-10-22 16:58:204136 “ ?KiCad可以在PCB編輯器中使用三種類型的原點(diǎn):頁(yè)面原點(diǎn)、鉆孔/放置文件原點(diǎn)以及網(wǎng)格原點(diǎn),也可以自定義坐標(biāo)軸的方向。 ” 簡(jiǎn)介 KiCad是一個(gè)基于2D數(shù)據(jù)的CAD系統(tǒng),它需要坐標(biāo)來(lái)標(biāo)記對(duì)象
2024-11-12 12:22:143535 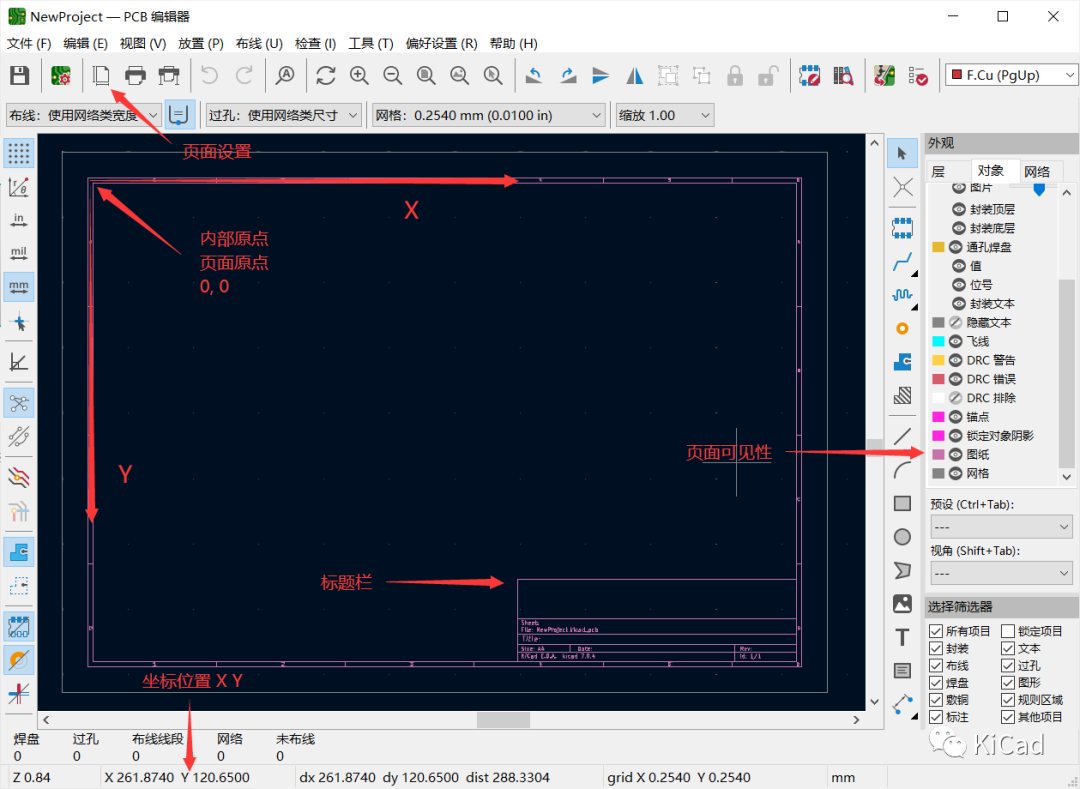
在封裝設(shè)計(jì)中,原點(diǎn)是一個(gè)重要的參考點(diǎn),通常根據(jù)封裝類型被設(shè)置在關(guān)鍵位置,如幾何中心或1腳焊盤等。例如,芯片封裝的原點(diǎn)可能位于幾何中心,而連接器封裝的原點(diǎn)可能在引腳起始位置。Fanyskill 腳本為器件提供了靈活設(shè)置原點(diǎn)的功能,能夠快速切換原點(diǎn)位置,以滿足不同設(shè)計(jì)需求。
2025-03-31 09:37:091261 
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論