1、初始化參數(shù) 在接線(xiàn)之前,先初始化參數(shù)。在控制卡上:選好控制方式;將PID參數(shù)清零;讓控制卡上電時(shí)默認(rèn)使能信號(hào)關(guān)閉;將此狀態(tài)保存,確保控制卡再次上電時(shí)即為此狀態(tài)。 在伺服電機(jī)上:設(shè)置控制方式;設(shè)置
2017-11-22 06:04:00 48606
48606 PLC與伺服驅(qū)動(dòng)器的編程接線(xiàn)方法。伺服控制系統(tǒng)的使用方法其實(shí)跟變頻器類(lèi)似,它的作用類(lèi)似于變頻器應(yīng)用于普通的交流馬達(dá),也是屬于PLC伺服控制系統(tǒng)的一部分,主要應(yīng)用于高精度的定位系統(tǒng),在這里需要注意的是伺服驅(qū)動(dòng)器方面如何去正確接線(xiàn)。
2022-10-21 09:14:334661 伺服電機(jī)又稱(chēng)執(zhí)行電機(jī),在自動(dòng)控制系統(tǒng)中,用作執(zhí)行元件,把收到的電信號(hào)轉(zhuǎn)換成電機(jī)軸上的角位移或角速度輸出。伺服電機(jī)內(nèi)部的轉(zhuǎn)子是永磁鐵,驅(qū)動(dòng)器控制的U/V/W三相電形成電磁場(chǎng),轉(zhuǎn)子在此磁場(chǎng)的作用下轉(zhuǎn)動(dòng)
2023-06-13 11:18:392755 伺服電機(jī)的原理是什么?伺服電機(jī)的調(diào)試方法是什么?
2021-09-29 07:47:13
伺服電機(jī)按照電流可分為哪幾類(lèi)?伺服電機(jī)的調(diào)試方法有哪些?
2021-09-23 06:29:52
伺服電機(jī)的負(fù)載慣量具有哪些作用?影響伺服電機(jī)的負(fù)載慣量的因素是什么?
2021-09-27 09:10:12
伺服電機(jī)的轉(zhuǎn)矩控制模式是什么意思?伺服電機(jī)的轉(zhuǎn)矩控制模式有何作用?
2021-10-08 07:06:16
還是不要自己改,重新定制或買(mǎi)一根更長(zhǎng)的伺服編碼器線(xiàn)比較好。伺服編碼器接線(xiàn)方法伺服編碼器是伺服電機(jī)使用的編碼器,伺服電機(jī)編碼器接線(xiàn)主要有兩種方法︰1、方法一設(shè)置好伺服電機(jī)相應(yīng)的位置,連接時(shí)伺服電機(jī)編碼器
2023-03-09 18:22:01
1、初始化參數(shù) 在接線(xiàn)之前,先初始化參數(shù)。在控制卡上:選好控制方式;將PID參數(shù)清零;讓控制卡上電時(shí)默認(rèn)使能信號(hào)關(guān)閉;將此狀態(tài)保存,確保控制卡再次上電時(shí)即為此狀態(tài)。 在伺服電機(jī)上:設(shè)置控制
2020-12-10 16:24:37
伺服驅(qū)動(dòng)器在控制信號(hào)的作用下驅(qū)動(dòng)執(zhí)行電機(jī),因此驅(qū)動(dòng)器是否能正常工作直接影響設(shè)備的整體性能。在伺服控制系統(tǒng)中,伺服驅(qū)動(dòng)器相當(dāng)于大腦,執(zhí)行電機(jī)相當(dāng)于手腳。而伺服驅(qū)動(dòng)器在伺服控制系統(tǒng)中的作用就是調(diào)節(jié)電機(jī)
2021-06-28 09:06:31
伺服驅(qū)動(dòng)器的工作原理及伺服驅(qū)動(dòng)器的常見(jiàn)接線(xiàn)方法是什么?
2021-09-29 06:12:11
在電機(jī)控制系統(tǒng)中,Leadway電源模塊的使能信號(hào)(Enable Signal)是協(xié)調(diào)電源啟停與電機(jī)驅(qū)動(dòng)的核心控制邏輯之一。其作用不僅限于簡(jiǎn)單的通斷控制,更涉及系統(tǒng)安全、能耗管理及多設(shè)備協(xié)同。使能
2025-05-15 09:38:20
V90伺服使能后電機(jī)會(huì)有嗡嗡的聲音,
已進(jìn)行了一鍵優(yōu)化功能,電機(jī)運(yùn)行起來(lái)了聲音會(huì)消失,停下就會(huì)出現(xiàn)。
2023-11-03 08:07:22
我們公司用的V90伺服電機(jī),有的電機(jī)使能會(huì)震動(dòng)一下(在電機(jī)編碼器端會(huì)響一聲),有的不會(huì),請(qǐng)問(wèn)這是為什么。我怕很好奇,我們公司用的都是PN通訊的伺服驅(qū)動(dòng)器,大多是都是多圈絕對(duì)值,很少增量式,也會(huì)用高低慣量的電機(jī)。
2024-01-09 08:08:11
伺服電機(jī)的控制信號(hào)怎么設(shè)定?比如除了控制速度所需的模擬電壓外還有伺服使能等參數(shù),怎樣把這些參數(shù)在數(shù)據(jù)段設(shè)定?這些參數(shù)有固定規(guī)則嗎?
2013-04-22 20:52:18
為什么用PLC控制伺服控制器一給使能電機(jī)就轉(zhuǎn)(此時(shí)PLC還沒(méi)運(yùn)行呢),控制器和電機(jī)都已經(jīng)測(cè)試好了
2023-12-11 07:00:33
請(qǐng)問(wèn)一下交流伺服電機(jī)與驅(qū)動(dòng)器是怎樣進(jìn)行接線(xiàn)的?
2021-09-24 10:06:11
各位大佬,請(qǐng)教我在用一款400W的1.27N那款伺服電機(jī),可能是因?yàn)闇p速機(jī)的問(wèn)題在使能狀態(tài)下 我可以很輕易的推動(dòng)電機(jī),然后電機(jī)報(bào)錯(cuò)使能丟失(這種是在plc控制狀態(tài)下的情況)
當(dāng)我用
2024-01-09 07:26:31
伺服驅(qū)動(dòng)器的收到伺服使能信號(hào)后,伺服電機(jī)用手去作用時(shí),會(huì)有明顯的阻力,請(qǐng)問(wèn)大神在使能狀態(tài)下伺服電機(jī)U、V、W三相繞組的輸入電壓是什么樣的呢?問(wèn)什么這種狀態(tài)下可以使電機(jī)抗干擾?
2018-05-02 21:42:37
關(guān)于安川伺服電機(jī)采用位脈沖+符號(hào)控制方式的接線(xiàn)與設(shè)置不看肯定后悔
2021-09-28 07:59:51
進(jìn)行調(diào)試。下面是調(diào)試伺服電機(jī)的具體步驟: 1、初始化參數(shù)在接線(xiàn)之前,先初始化參數(shù)。在控制卡上:選好控制方式;將PID參數(shù)清零;讓控制卡上電時(shí)默認(rèn)使能信號(hào)關(guān)閉;將此狀態(tài)保存,確保控制卡再次上電時(shí)即為
2015-12-29 11:12:23
伺服驅(qū)動(dòng)器和伺服電機(jī)的接線(xiàn)方法是什么?伺服驅(qū)動(dòng)器如何進(jìn)行參數(shù)配置?如何通過(guò)PLC控制伺服電機(jī)的正反轉(zhuǎn)及定長(zhǎng)控制?
2021-09-29 08:38:16
三相伺服電機(jī)接線(xiàn)UVW可以互換嗎?如果三相伺服電機(jī)接線(xiàn)UVW接錯(cuò)了怎么辦?會(huì)有什么后果?
2021-06-28 06:51:07
式 (即位置控制) 下;在需要脫機(jī)時(shí),使信號(hào) C- MODE閉合,使驅(qū)動(dòng)器工作在第二方式(即 轉(zhuǎn)矩控制)下,由于轉(zhuǎn)矩指令輸入 TRQR未接線(xiàn),因此電機(jī)輸出轉(zhuǎn)矩為零, 從而實(shí)現(xiàn)脫機(jī)。 6、在我們開(kāi)發(fā)
2020-06-30 17:54:21
觸點(diǎn)損壞無(wú)法修復(fù)而又急需使用時(shí),采用圖12中所示的接線(xiàn)方法,可滿(mǎn)足應(yīng)急使用要求。按下SB1,交流接觸器KM吸合。放松按鈕SB1后,KM的觸點(diǎn)兼作自鎖觸點(diǎn),使接觸器自鎖,因此KM仍保持吸合。 圖中SB2
2020-12-01 17:19:31
步進(jìn)伺服電機(jī)回原點(diǎn)的常用方法是什么?
2021-09-29 07:18:40
步進(jìn)電機(jī)和伺服電機(jī)是怎樣接線(xiàn)的?步進(jìn)電機(jī)和伺服電機(jī)有哪幾種接線(xiàn)方式?
2021-09-26 08:00:08
伺服驅(qū)動(dòng)器的工作原理及伺服驅(qū)動(dòng)器的常見(jiàn)接線(xiàn)方法: 伺服驅(qū)動(dòng)器在控制信號(hào)的作用下驅(qū)動(dòng)執(zhí)行電機(jī),因此驅(qū)動(dòng)器是否能正常工作直接影響設(shè)備的整體性能。在伺服控制系統(tǒng)中,伺服驅(qū)動(dòng)器相當(dāng)于大腦,執(zhí)行電機(jī)相當(dāng)于
2021-06-28 07:19:34
西門(mén)子伺服驅(qū)動(dòng)與電機(jī)編碼器連接線(xiàn)最長(zhǎng)能達(dá)到多少米?哪位大神做過(guò)長(zhǎng)距離傳輸?shù)恼?qǐng)指導(dǎo)一下!!!!!!
2023-11-07 06:21:50
西門(mén)子S7-1200控制伺服/步進(jìn)電機(jī)方法與接線(xiàn)(全)伺服/步進(jìn)電機(jī)在非標(biāo)自動(dòng)化控制中十分常用,但作者發(fā)現(xiàn)在各類(lèi)開(kāi)源網(wǎng)站上很少有人做西門(mén)子1200PLC控制伺服/步進(jìn)電機(jī)的教程,于是今天想著跟大家
2021-06-28 07:17:45
西門(mén)子S7-1200控制伺服/步進(jìn)電機(jī)方法是什么?怎么接線(xiàn)的?
2021-09-29 06:03:32
伺服電機(jī)的主要作用和優(yōu)勢(shì)是什么?
2021-09-24 08:11:28
伺服電機(jī)。在使用伺服電機(jī)之前都要對(duì)其進(jìn)行調(diào)試,具體如下1、初始化參數(shù)在接線(xiàn)之前,先初始化參數(shù)。在控制卡上:選好控制方式;將PID參數(shù)清零;讓控制卡上電時(shí)默認(rèn)使能信號(hào)關(guān)閉;將此狀態(tài)保存,確保控制卡再次上電
2018-10-31 11:06:33
請(qǐng)問(wèn)伺服電機(jī)的選型計(jì)算方法是什么?
2021-09-28 08:45:32
倍福PLC控制臺(tái)達(dá)伺服電機(jī)遇到的使能問(wèn)題應(yīng)該如何解決?
2021-10-13 06:30:31
請(qǐng)問(wèn)怎樣用一個(gè)脈沖(信號(hào)的一開(kāi)一關(guān))來(lái)從伺服驅(qū)動(dòng)器位置控制上使伺服電機(jī)旋轉(zhuǎn)呢?
2023-03-30 17:21:51
機(jī)電控制中伺服電機(jī)的作用伺服電動(dòng)機(jī)又叫執(zhí)行電動(dòng)機(jī),或叫控制電動(dòng)機(jī)。在自動(dòng)控制系統(tǒng)中,伺服電動(dòng)機(jī)是一個(gè)執(zhí)行元件,它的作用是把信號(hào)(控制電壓或相位)變換成機(jī)械
2010-02-25 17:48:27 90
90 伺服電機(jī)的選型計(jì)算方法,幫助初次學(xué)習(xí)者了解伺服電機(jī)的選型
2016-05-19 13:41:1918 什么是伺服電機(jī)?它們是如何起作用的?(基本駕駛方法和技術(shù))如何選擇伺服電機(jī)應(yīng)用Arduino平臺(tái)工作
2017-05-02 15:37:3923 伺服電動(dòng)機(jī)又叫執(zhí)行電動(dòng)機(jī),或叫控制電動(dòng)機(jī)。在自動(dòng)控制系統(tǒng)中,伺服電動(dòng)機(jī)是一個(gè)執(zhí)行元件,它的作用是把信號(hào)(控制電壓或相位)變換成機(jī)械位移,也就是把接收到的電信號(hào)變?yōu)?b class="flag-6" style="color: red">電機(jī)的一定轉(zhuǎn)速或角位移。
2017-05-25 09:53:088289 伺服電動(dòng)機(jī)又叫執(zhí)行電動(dòng)機(jī),或叫控制電動(dòng)機(jī)。在自動(dòng)控制系統(tǒng)中,伺服電動(dòng)機(jī)是一個(gè)執(zhí)行元件,它的作用是把信號(hào)(控制電壓或相位)變換成機(jī)械位移,也就是把接收到的電信號(hào)變?yōu)?b class="flag-6" style="color: red">電機(jī)的一定轉(zhuǎn)速或角位移。
2017-05-25 10:57:2334978 基于STM32的伺服電機(jī)控制方法研究與設(shè)計(jì)
2017-09-28 15:52:33237 伺服系統(tǒng)(servo mechanism)是使物體的位置、方位、狀態(tài)等輸出被控量能夠跟隨輸入目標(biāo)(或給定值)的任意變化的自動(dòng)控制系統(tǒng)。伺服主要靠脈沖來(lái)定位,基本上可以這樣理解,伺服電機(jī)接收到1個(gè)脈沖
2017-10-11 15:22:326 “伺服”一詞源于希臘語(yǔ)“奴隸”的意思。“伺服電機(jī)”可以理解為絕對(duì)服從控制信號(hào)指揮的電機(jī):在控制信號(hào)發(fā)出之前,轉(zhuǎn)子靜止不動(dòng);當(dāng)控制信號(hào)發(fā)出時(shí),轉(zhuǎn)子立即轉(zhuǎn)動(dòng);當(dāng)控制信號(hào)消失時(shí),轉(zhuǎn)子能即時(shí)停轉(zhuǎn)。伺服電機(jī)是自動(dòng)控制裝置中被用作執(zhí)行元件的微特電機(jī),其功能是將電信號(hào)轉(zhuǎn)換成轉(zhuǎn)軸的角位移或角速度。
2018-09-23 17:51:0027563 本文來(lái)分析一下伺服電機(jī)接線(xiàn)圖,伺服電機(jī)怎么接線(xiàn)。
2020-07-29 11:06:35138083 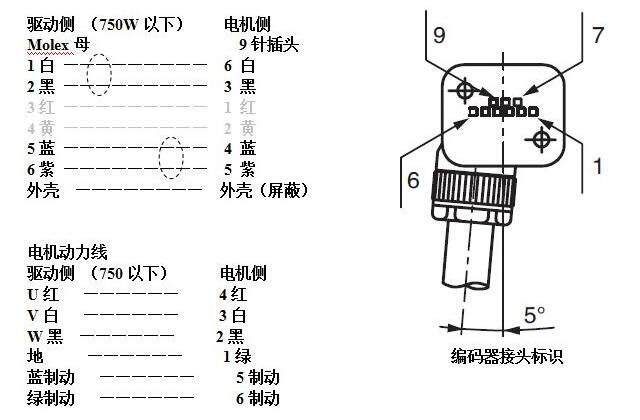
步進(jìn)電機(jī)和伺服電機(jī)的辨別方法如下:力矩范圍:步進(jìn)電機(jī)系統(tǒng)一般為中小力矩(一般在40Nm以下)范圍;伺服電機(jī)系統(tǒng)可實(shí)現(xiàn)全范圍。
2020-09-11 10:27:1710007 伺服控制系統(tǒng)的使用方法其實(shí)跟變頻器類(lèi)似,它的作用類(lèi)似于變頻器應(yīng)用于普通的交流馬達(dá),也是屬于PLC伺服控制系統(tǒng)的一部分,主要應(yīng)用于高精度的定位系統(tǒng),在這里需要注意的是伺服驅(qū)動(dòng)器方面如何去正確接線(xiàn)。
2022-10-13 14:49:389732 對(duì)于一個(gè)閉環(huán)控制系統(tǒng),如果反饋信號(hào)的方向不正確,后果肯定是災(zāi)難性的。通過(guò)控制卡打開(kāi)伺服的使能信號(hào)。這時(shí)伺服應(yīng)該以一個(gè)較低的速度轉(zhuǎn)動(dòng),這就是傳說(shuō)中的“零漂”。
2022-12-12 14:08:223106 伺服電機(jī)的作用是驅(qū)動(dòng)控制對(duì)象。被控對(duì)象的轉(zhuǎn)距和轉(zhuǎn)速受信號(hào)電壓控制,信號(hào)電壓的大小和極性改變時(shí),電機(jī)的轉(zhuǎn)動(dòng)速度和方向也跟著變化。
2023-03-01 15:42:009344 伺服電機(jī)的最簡(jiǎn)單的控制方法是使用脈沖/方向信號(hào)控制。這種方法使用脈沖信號(hào)控制電機(jī)的位置和方向。具體來(lái)說(shuō),當(dāng)接收到一個(gè)脈沖信號(hào)時(shí),電機(jī)會(huì)運(yùn)動(dòng)一個(gè)固定的步長(zhǎng),方向信號(hào)則控制電機(jī)的運(yùn)動(dòng)方向。通過(guò)調(diào)整脈沖信號(hào)的頻率和方向信號(hào)的狀態(tài),可以控制伺服電機(jī)的速度和位置。
2023-03-01 15:49:064746 
步進(jìn)電機(jī)的使能信號(hào)是控制步進(jìn)電機(jī)啟停的信號(hào)。通常情況下,步進(jìn)電機(jī)的驅(qū)動(dòng)器會(huì)提供一個(gè)使能信號(hào)輸入端口,當(dāng)該輸入端口處于使能狀態(tài)時(shí),步進(jìn)電機(jī)才能接受控制信號(hào)并工作;當(dāng)該輸入端口處于禁止?fàn)顟B(tài)時(shí),步進(jìn)電機(jī)將停止工作,不再接受控制信號(hào)。
2023-03-03 11:03:3022083 伺服電機(jī)是一種可以通過(guò)控制器精確地控制位置、速度和加速度的電機(jī)。伺服電機(jī)通常由電機(jī)、編碼器、控制器等部分組成。控制器根據(jù)編碼器反饋的位置信息,調(diào)節(jié)電機(jī)的驅(qū)動(dòng)電流,從而控制電機(jī)的位置和運(yùn)動(dòng)。因此在很多需要高精度運(yùn)動(dòng)控制的領(lǐng)域得到了廣泛應(yīng)用。
2023-03-03 11:17:2712952 需要注意的是,在連接伺服電機(jī)時(shí)需要仔細(xì)查看電機(jī)和驅(qū)動(dòng)器的說(shuō)明書(shū),并按照說(shuō)明書(shū)進(jìn)行正確連接。在連接時(shí)需要注意絕緣和接觸可靠性,以確保伺服電機(jī)能夠穩(wěn)定可靠地工作。同時(shí),還需要注意接線(xiàn)的順序和方式,以免出現(xiàn)接線(xiàn)錯(cuò)誤導(dǎo)致電機(jī)損壞或安全事故。
2023-03-03 11:19:5212978 伺服電機(jī)使能通常是指通過(guò)控制器對(duì)伺服電機(jī)驅(qū)動(dòng)器的一個(gè)信號(hào),用來(lái)使伺服電機(jī)能夠進(jìn)行運(yùn)動(dòng)或停止。伺服電機(jī)使能信號(hào)一般為一個(gè)數(shù)字信號(hào),用來(lái)控制伺服電機(jī)驅(qū)動(dòng)器的輸出。當(dāng)伺服電機(jī)驅(qū)動(dòng)器接收到使能信號(hào)時(shí),驅(qū)動(dòng)器才能對(duì)電機(jī)進(jìn)行驅(qū)動(dòng),否則電機(jī)無(wú)法進(jìn)行運(yùn)動(dòng)。
2023-03-03 11:21:1411623 變頻電機(jī)的接線(xiàn)方法與普通電機(jī)不同,需要特別注意接線(xiàn)的細(xì)節(jié)和步驟,以確保變頻電機(jī)的正常工作和安全性。一般來(lái)說(shuō),變頻電機(jī)的接線(xiàn)方法可以分為以下幾個(gè)步驟
2023-03-06 16:05:0216754 伺服電機(jī)的頻率通常指電機(jī)旋轉(zhuǎn)的頻率,也可以理解為控制器發(fā)送給電機(jī)的脈沖信號(hào)頻率。一般來(lái)說(shuō),伺服電機(jī)的頻率計(jì)算涉及到電機(jī)的額定轉(zhuǎn)速、控制器的脈沖輸出方式等因素,具體計(jì)算方法如下:
2023-03-07 14:40:3410979 變頻器使能信號(hào)是指用于啟動(dòng)或停止變頻器控制電機(jī)的信號(hào)。當(dāng)變頻器接收到使能信號(hào)后,變頻器將響應(yīng)該信號(hào)并根據(jù)設(shè)定參數(shù)控制電機(jī)轉(zhuǎn)速和方向。反之,如果變頻器未接收到使能信號(hào)或使能信號(hào)失效,變頻器將停止輸出控制信號(hào),從而使電機(jī)停止運(yùn)行。
2023-03-09 11:13:3012215 伺服電機(jī)是一種能夠精確控制運(yùn)動(dòng)的電機(jī),通常包括以下幾種類(lèi)型:
直流伺服電機(jī):直流伺服電機(jī)是利用直流電作為輸入信號(hào),通過(guò)控制電流大小和方向來(lái)控制電機(jī)轉(zhuǎn)速和轉(zhuǎn)向的一種電機(jī)。直流伺服電機(jī)通常具有高速度和高精度的優(yōu)點(diǎn),廣泛應(yīng)用于工業(yè)自動(dòng)化領(lǐng)域。
2023-03-12 10:20:324990 總之,PLC控制伺服電機(jī)正反轉(zhuǎn)的工作原理是通過(guò)編寫(xiě)程序、檢測(cè)輸入信號(hào)、信號(hào)處理、控制輸出、反饋監(jiān)測(cè)等步驟來(lái)實(shí)現(xiàn)。
2023-03-22 17:40:0913176 伺服放大器的作用是將多個(gè)輸入信號(hào)與反饋信號(hào)進(jìn)行綜合并加以放大,根據(jù)綜合信號(hào)極性的不同,輸出相應(yīng)的信號(hào)控制伺服電機(jī)正轉(zhuǎn)或反轉(zhuǎn)。當(dāng)輸入信號(hào)和反饋信號(hào)相平衡時(shí),伺服電機(jī)停止轉(zhuǎn)動(dòng),執(zhí)行機(jī)構(gòu)輸出軸便穩(wěn)定在一定位置上。
2023-04-24 15:03:304143 
伺服驅(qū)動(dòng)器在控制信號(hào)的作用下驅(qū)動(dòng)執(zhí)行電機(jī),因此驅(qū)動(dòng)器是否能正常工作直接影響設(shè)備的整體性能。在伺服控制系統(tǒng)中,伺服驅(qū)動(dòng)器相當(dāng)于大腦,執(zhí)行電機(jī)相當(dāng)于手腳。而伺服驅(qū)動(dòng)器在伺服控制系統(tǒng)中的作用就是調(diào)節(jié)電機(jī)的轉(zhuǎn)速,因此也是一個(gè)自動(dòng)調(diào)速系統(tǒng)。
2023-05-09 14:54:5627454 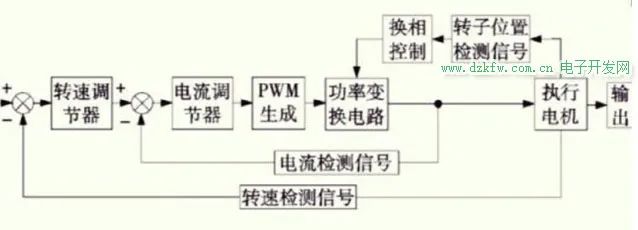
“伺服”一詞源于希臘語(yǔ)“奴隸”的意思。“伺服電機(jī)”可以理解為絕對(duì)服從控制信號(hào)指揮的電機(jī):在控制信號(hào)發(fā)出之前,轉(zhuǎn)子靜止不動(dòng);當(dāng)控制信號(hào)發(fā)出時(shí),轉(zhuǎn)子立即轉(zhuǎn)動(dòng);當(dāng)控制信號(hào)消失時(shí),轉(zhuǎn)子能即時(shí)停轉(zhuǎn)。
2023-05-10 10:56:583284 電子發(fā)燒友網(wǎng)站提供《伺服電機(jī)定位校準(zhǔn)方法教程.zip》資料免費(fèi)下載
2023-06-28 11:03:461 伺服電機(jī)因?yàn)殚L(zhǎng)期連續(xù)不斷使用或者使用者操作不當(dāng),會(huì)經(jīng)常發(fā)生電機(jī)故障,維修又相對(duì)復(fù)雜的。小編收集了伺服電機(jī)發(fā)生的13種常見(jiàn)的故障問(wèn)題的維修方法,供大家學(xué)習(xí)借鑒。
2023-08-07 11:20:234171 通過(guò)總線(xiàn)控制伺服電機(jī)時(shí),如何進(jìn)行回零(尋參考點(diǎn))控制?這里就CANOPEN伺服電機(jī)的回零控制方法分享給大家。
2023-10-23 11:42:205451 
伺服電機(jī)速度增益的作用? 伺服電機(jī)速度增益是伺服控制系統(tǒng)中的一個(gè)重要參數(shù),它對(duì)于電機(jī)的運(yùn)行速度和穩(wěn)定性起著關(guān)鍵作用。本文將詳盡、詳實(shí)、細(xì)致地介紹伺服電機(jī)速度增益的作用。 一、伺服電機(jī)的基本原理 伺服
2023-12-25 13:57:552401 伺服電機(jī)飛車(chē)的原因? 伺服電機(jī)飛車(chē)是指電機(jī)在工作過(guò)程中出現(xiàn)突然加速或失控的現(xiàn)象,使機(jī)械設(shè)備無(wú)法正常工作或造成危險(xiǎn)。 第一部分:引言 伺服電機(jī)是一種用于控制機(jī)械系統(tǒng)的電機(jī)。它通常使用反饋信號(hào)來(lái)控制電機(jī)
2023-12-25 13:58:015415 的控制器,其主要作用是將上位機(jī)發(fā)出的指令轉(zhuǎn)換為伺服電機(jī)能夠識(shí)別的信號(hào),從而實(shí)現(xiàn)對(duì)伺服電機(jī)的精確控制。伺服驅(qū)動(dòng)器的主要作用如下: 1. 實(shí)現(xiàn)位置控制:伺服驅(qū)動(dòng)器可以根據(jù)上位機(jī)發(fā)出的指令,控制伺服電機(jī)的轉(zhuǎn)速和轉(zhuǎn)向,從而實(shí)現(xiàn)
2024-01-17 17:52:4510672 伺服電機(jī)是一種特殊的電機(jī),可以根據(jù)控制信號(hào)準(zhǔn)確地控制角度、速度和位置。伺服電機(jī)的最簡(jiǎn)單控制方法可以分為開(kāi)環(huán)控制和閉環(huán)控制兩種。 開(kāi)環(huán)控制:開(kāi)環(huán)控制是指通過(guò)直接提供控制信號(hào),使伺服電機(jī)旋轉(zhuǎn)到所設(shè)
2024-01-14 14:40:273114 伺服電機(jī)原理與應(yīng)用 一、伺服電機(jī)原理 伺服電機(jī)是一種控制系統(tǒng),通過(guò)傳感器接受反饋信號(hào),將輸出信號(hào)與輸入信號(hào)進(jìn)行比較,并通過(guò)控制器對(duì)輸出信號(hào)進(jìn)行調(diào)整,以實(shí)現(xiàn)精確控制電機(jī)運(yùn)動(dòng)的位置、速度和力矩。伺服電機(jī)
2024-01-22 16:32:261979 零對(duì)位方法。 伺服電機(jī)編碼器的故障原因: (1) 機(jī)械撞擊:長(zhǎng)時(shí)間運(yùn)行中,如果電機(jī)發(fā)生撞擊或外力作用,可能導(dǎo)致編碼器的機(jī)械部件損壞。 (2) 環(huán)境因素:工作環(huán)境的溫度、濕度、腐蝕性氣體等因素也可能導(dǎo)致編碼器部件老化、腐
2024-02-14 18:06:0030699 伺服電機(jī)是一種高精度、高性能的電機(jī),廣泛應(yīng)用于自動(dòng)化設(shè)備、機(jī)器人、數(shù)控機(jī)床等領(lǐng)域。伺服電機(jī)的工作原理是將輸入的電信號(hào)轉(zhuǎn)換為機(jī)械運(yùn)動(dòng),實(shí)現(xiàn)對(duì)負(fù)載的精確控制。在伺服電機(jī)系統(tǒng)中,編碼器起著至關(guān)重要的作用
2024-06-05 14:53:584022 伺服電機(jī)是一種高精度、高響應(yīng)速度的電機(jī),廣泛應(yīng)用于工業(yè)自動(dòng)化、機(jī)器人、航空航天等領(lǐng)域。伺服電機(jī)的控制方法有很多種,這里我們將介紹一種最簡(jiǎn)單、最基礎(chǔ)的控制方法——開(kāi)環(huán)控制。 開(kāi)環(huán)控制是一種沒(méi)有反饋環(huán)節(jié)
2024-06-05 15:49:202090 220V電機(jī)電容接線(xiàn)方法是一個(gè)涉及到電機(jī)維修和安裝的重要技術(shù)問(wèn)題。在這篇文章中,我們將詳細(xì)介紹220V電機(jī)電容的接線(xiàn)方法,包括電容的作用、接線(xiàn)原理、接線(xiàn)步驟以及注意事項(xiàng)等內(nèi)容。 一、電容的作用 電容
2024-06-12 09:38:4011537 旋轉(zhuǎn)方向參數(shù)的設(shè)置方法。 伺服電機(jī)的基本原理 伺服電機(jī)是一種將電能轉(zhuǎn)換為機(jī)械能的裝置,其基本原理是利用電磁力驅(qū)動(dòng)電機(jī)轉(zhuǎn)子旋轉(zhuǎn)。伺服電機(jī)主要由定子、轉(zhuǎn)子、編碼器、驅(qū)動(dòng)器等部分組成。定子是電機(jī)的固定部分,轉(zhuǎn)子是電
2024-06-12 10:11:555718 松下伺服電機(jī)是一種高精度、高響應(yīng)速度的電機(jī),廣泛應(yīng)用于工業(yè)自動(dòng)化、機(jī)器人、數(shù)控機(jī)床等領(lǐng)域。在使用過(guò)程中,有時(shí)需要對(duì)伺服電機(jī)進(jìn)行內(nèi)部參數(shù)的調(diào)整,以滿(mǎn)足特定的應(yīng)用需求。本文將詳細(xì)介紹松下伺服內(nèi)部使能
2024-06-12 10:21:184463 為電機(jī)的轉(zhuǎn)矩和轉(zhuǎn)速,從而實(shí)現(xiàn)對(duì)電機(jī)的精確控制。伺服驅(qū)動(dòng)器廣泛應(yīng)用于工業(yè)自動(dòng)化、機(jī)器人、數(shù)控機(jī)床等領(lǐng)域。 伺服驅(qū)動(dòng)器使能的概念 伺服驅(qū)動(dòng)器的使能(Enable)功能是指驅(qū)動(dòng)器接收到使能信號(hào)后,才能正常工作。使能信號(hào)通常是
2024-06-14 10:18:1810833 。使能信號(hào)的接法對(duì)于伺服電機(jī)的正常工作至關(guān)重要。本文將詳細(xì)介紹伺服電機(jī)使能信號(hào)的接法,包括使能信號(hào)的定義、作用、接法以及注意事項(xiàng)。 一、使能信號(hào)的定義 使能信號(hào)(Enable Signal)是一種數(shù)字信號(hào),通常為高電平或低電平。在伺服電機(jī)控制系
2024-06-14 10:21:245482 松下伺服驅(qū)動(dòng)器是一種高性能的電機(jī)控制設(shè)備,廣泛應(yīng)用于工業(yè)自動(dòng)化、機(jī)器人、數(shù)控機(jī)床等領(lǐng)域。在實(shí)際應(yīng)用中,為了確保系統(tǒng)的安全和穩(wěn)定運(yùn)行,需要對(duì)伺服驅(qū)動(dòng)器進(jìn)行內(nèi)部使能操作。本文將詳細(xì)介紹松下伺服驅(qū)動(dòng)器內(nèi)部
2024-06-14 10:22:524342 伺服電機(jī)壓力機(jī)是一種采用伺服電機(jī)作為動(dòng)力源的新型壓力機(jī),具有高精度、高效率、高穩(wěn)定性等特點(diǎn),廣泛應(yīng)用于各種工業(yè)生產(chǎn)領(lǐng)域。本文將詳細(xì)介紹伺服電機(jī)壓力機(jī)的作用、工作原理、主要特點(diǎn)、應(yīng)用領(lǐng)域以及發(fā)展趨勢(shì)
2024-06-17 10:49:102188 伺服電機(jī)編碼器是伺服系統(tǒng)中的重要組成部分,它的作用是將伺服電機(jī)的旋轉(zhuǎn)位置、速度等信息轉(zhuǎn)換成電信號(hào),為控制系統(tǒng)提供反饋信息。 一、伺服電機(jī)編碼器的作用 伺服電機(jī)編碼器的主要作用有以下幾點(diǎn): 位置反饋
2024-06-17 10:52:004045 插頭線(xiàn)接線(xiàn)原理 伺服電機(jī)編碼器的作用 伺服電機(jī)編碼器是一種將電機(jī)軸的旋轉(zhuǎn)位置、速度等信息轉(zhuǎn)換為電信號(hào)的傳感器。編碼器輸出的信號(hào)經(jīng)過(guò)處理后,可以用于控制伺服電機(jī)的運(yùn)行狀態(tài),實(shí)現(xiàn)精確的位置控制和速度控制。 伺服電機(jī)編
2024-06-17 10:56:015853 電機(jī)編碼器的作用 位置檢測(cè) 伺服電機(jī)編碼器的主要作用之一是實(shí)現(xiàn)對(duì)伺服電機(jī)轉(zhuǎn)子位置的實(shí)時(shí)檢測(cè)。編碼器通過(guò)測(cè)量轉(zhuǎn)子的旋轉(zhuǎn)角度,將位置信號(hào)轉(zhuǎn)換為電信號(hào),從而實(shí)現(xiàn)對(duì)伺服電機(jī)的精確控制。這對(duì)于保證伺服電機(jī)的穩(wěn)定性和精度具
2024-06-17 11:09:114198 引言 伺服電機(jī)是一種高精度、高響應(yīng)速度的電機(jī),廣泛應(yīng)用于工業(yè)自動(dòng)化、機(jī)器人、數(shù)控機(jī)床等領(lǐng)域。編碼器作為伺服電機(jī)的重要組成部分,其作用是檢測(cè)電機(jī)的轉(zhuǎn)速、位置和方向,為控制系統(tǒng)提供反饋信號(hào)。三菱電機(jī)作為
2024-06-17 14:11:535849 的作用 伺服電機(jī)的使能信號(hào)是電機(jī)控制系統(tǒng)中的一個(gè)重要信號(hào),其主要作用如下: 1.1 控制電機(jī)啟動(dòng)和停止 使能信號(hào)是控制伺服電機(jī)啟動(dòng)和停止的關(guān)鍵信號(hào)。當(dāng)使能信號(hào)為高電平時(shí),電機(jī)控制系統(tǒng)會(huì)接收到啟動(dòng)指令,電機(jī)開(kāi)始運(yùn)行;當(dāng)
2024-07-10 14:58:095261 引言 伺服電機(jī)是一種將電能轉(zhuǎn)換為機(jī)械能的裝置,具有高精度、高響應(yīng)速度、高穩(wěn)定性等特點(diǎn)。在工業(yè)自動(dòng)化、機(jī)器人、航空航天等領(lǐng)域,伺服電機(jī)被廣泛應(yīng)用于實(shí)現(xiàn)精確的位置、速度和力控制。伺服電機(jī)的轉(zhuǎn)速調(diào)整是實(shí)現(xiàn)
2024-07-14 10:44:473990 步進(jìn)電機(jī)伺服控制系統(tǒng)是一種精密的電機(jī)控制系統(tǒng),它通過(guò)精確控制電機(jī)的步進(jìn)角度來(lái)實(shí)現(xiàn)對(duì)機(jī)械運(yùn)動(dòng)的精確控制。這種系統(tǒng)廣泛應(yīng)用于自動(dòng)化設(shè)備、機(jī)器人、精密儀器等領(lǐng)域。 步進(jìn)電機(jī)伺服控制系統(tǒng)的作用 步進(jìn)電機(jī)伺服
2024-09-04 09:46:121709 步進(jìn)電機(jī)的伺服控制方法主要包括以下幾種: 1. 位置模式 定義 :在位置模式下,步進(jìn)伺服電機(jī)根據(jù)輸入的位置指令,通過(guò)閉環(huán)控制系統(tǒng)精確控制電機(jī)轉(zhuǎn)子的位置。 工作原理 :控制器會(huì)根據(jù)位置誤差調(diào)整驅(qū)動(dòng)電流
2024-09-04 09:48:041793 一、伺服電機(jī)的作用與特點(diǎn) 伺服電機(jī)(Servo motor),作為伺服系統(tǒng)中的關(guān)鍵組件,扮演著控制機(jī)械元件運(yùn)轉(zhuǎn)的重要角色。它是一種高精度、高響應(yīng)速度的電動(dòng)機(jī),能夠?qū)㈦妷?b class="flag-6" style="color: red">信號(hào)轉(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速,從而驅(qū)動(dòng)
2024-10-22 16:16:152908 電機(jī)系統(tǒng)中起著至關(guān)重要的作用,是實(shí)現(xiàn)高效、穩(wěn)定和精確控制的核心組件。編碼器的作用是什么呢?它的工作原理又是怎樣的?其利天下·伺服電機(jī)驅(qū)動(dòng)方案編碼器的作用位置反饋:
2024-11-02 10:38:191712 
伺服電機(jī)在運(yùn)行過(guò)程中可能會(huì)遇到多種故障,以下是一些常見(jiàn)故障及其解決方法: 一、伺服電機(jī)不轉(zhuǎn)動(dòng) 故障原因 : 電源未連接或接觸不良。 驅(qū)動(dòng)器與電機(jī)之間的連接線(xiàn)斷裂或接觸不良。 驅(qū)動(dòng)器故障。 電機(jī)故障
2024-11-20 09:48:087287 伺服編碼器是伺服電機(jī)系統(tǒng)中的關(guān)鍵組件,負(fù)責(zé)監(jiān)測(cè)電機(jī)的位置和運(yùn)動(dòng)狀態(tài),從而實(shí)現(xiàn)精確的位置控制。本文將詳細(xì)介紹伺服編碼器的接線(xiàn)方法,并探討伺服編碼器線(xiàn)是否可以自行延長(zhǎng)的問(wèn)題。? ? ? ?伺服編碼器
2024-12-09 01:02:443704 什么是伺服電機(jī)編碼器?
伺服電機(jī)編碼器是伺服系統(tǒng)中的核心反饋元件,用于實(shí)時(shí)檢測(cè)電機(jī)的轉(zhuǎn)速、位置、角度等參數(shù),并將信號(hào)反饋給控制器(如伺服驅(qū)動(dòng)器),形成閉環(huán)控制,確保電機(jī)運(yùn)動(dòng)的精準(zhǔn)性和穩(wěn)定性。
其
2025-06-09 11:07:312356 
 電子發(fā)燒友App
電子發(fā)燒友App








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論