步進電機能精確控制進氣量從而達到溫度的準確控制,新一代燃氣熱水器便是使用步進電機代替常規燃氣比例閥,進行燃氣輸出控制模塊。
2022-07-26 11:22:54 1403
1403 之前小白白寫過一篇步進電機驅動基礎,講了最基本的步進電機驅動方法。
2022-10-19 15:50:572769 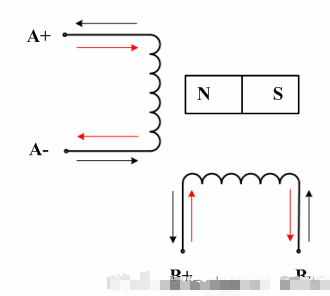
電機位置傳感器零位偏角(即旋變零位偏角或初始角)對電機輸出扭矩的精度至關重要。
2023-07-10 14:49:0115699 
假設已經實現了電機控制,后續的電機標定大抵上分成兩類,一類是效率標定,一類是外特性標定。前者目標是以提升在各工況下的系統效率。假設你了解交直軸變換,那么效率標定的目標,就是通過調整交直軸電流,在不同的轉速條件下,以更高的效率來實現扭矩。這個過程就是不斷調整你的交直軸電流(對于異步機還得調整轉差率);
2023-08-04 10:26:187692 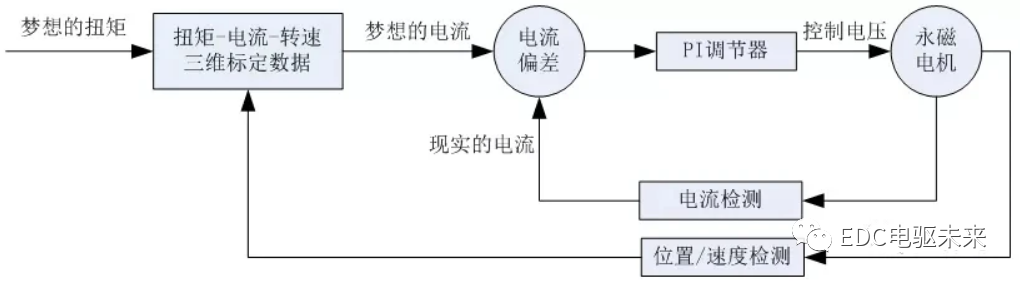
步進電機基礎(8.2)-步進電機的問題解決方案-降低振動噪音的解決方法前言基本信息前言說明8.2 降低振動噪音的解決方法1. 與驅動電路有關的方法2. 與電機有關的方法降低振動和噪音效果好的方法如下
2021-07-08 09:40:18
步進電機控制通常采用什么方法實現?
2021-09-30 07:15:35
步進電機基礎(8.1)-步進電機的問題解決方案-增加動態轉矩的解決方法前言基本信息前言說明8.1 增加動態轉矩的解決方法1 . 步進電機在低速時增加轉矩的方法1) 選擇步距角小的步進電機2) 雙極型
2021-07-07 07:29:39
步進電機最簡單的驅動方法,了解四軸步進電機驅動器原理 四軸步進電機驅動器原理-簡介四軸步進電機驅動器,其實就是一種將電脈沖轉化為角位移的執行機構。首先步進驅動器會接收到一個脈沖信號,然后它按設定
2021-07-12 08:18:40
步進電機基礎(7.1)-步進電機的選擇方法-電機種類的選擇(各種步進電機的優缺點)前言基本信息前言說明說明7.1 電機種類的選擇1 . 由PM型 、VR型 、HB型來選定2 . 步進電機的相數選擇
2021-06-28 08:47:37
步進電機基礎(5.7)-步進電機的驅動與控制-加速控制、減速控制和附加制動的驅動方法前言基本信息前言說明5.7 加速控制、減速控制5.8 附加制動的驅動方法1. 反相序激磁制動2.最終步進延遲制動
2021-07-08 06:45:53
步進伺服電機回原點的常用方法是什么?
2021-09-29 07:18:40
但是實找零的方法有很多種,步進伺服電機自身可以完成,上位機配合也可以完成,下面就來介紹下回原點的常見方法有以下幾種。一、步進伺服電機在工作的時候,處于一直轉動的狀態,但當它碰到原點開關的時候,伺服
2021-06-28 08:52:50
提出一種采用高精度角位移傳感器取代機械式細分讀數機構,通過有機電致發光顯示器( OLED) 和耦合棱鏡實現內置數顯的電子細分讀數方法,以有效地解決上述問題。1 測量原理1. 1 零位走動量的測量原理如圖
2018-05-03 09:22:37
請教各位ADI專家,我的LVDT傳感器接入AD698后,輸出零位有偏差,也就是傳感器的零位698調理輸出后不是0,而是1.5v,是不是相位補償有問題?數據轉換器專區
2018-09-25 17:40:45
我的LVDT傳感器接入AD698后,輸出零位有偏差,也就是傳感器的零位698調理輸出后不是0,而是1.5v,是不是相位補償有問題
2023-12-19 06:28:49
電勢模型的基礎上,結合旋轉變壓器解碼數據,提出了一種通過拖動電機被動轉動,測量電機繞組反電勢及旋變解碼數據高位信號的零位偏差直接測量方法。實驗表明該方法具有測試方法簡單、測量精度高等特點。
純
2025-08-04 15:01:53
、標定精度也不夠理想。基于模型的電機標定方法,魯棒性強,測試點少,提高測試效率,將MTPA和弱磁放在一張表格中標定,可同時實現基速以下以及高速弱磁區效率最優控制,采用GUI,易操作,弱化電機背景知識。通...
2021-08-27 06:01:41
在應用或設計傳感器時,常用零位法,微差法與閉環技術,來削弱或消除系統誤差 1)零位法 零位法是指被測量與標準量相比較,當達到平衡時,儀表指零,此時被測量就等于標準量。機械天平就是典型的例子
2018-11-15 16:49:08
永磁交流伺服電機的工作原理是什么?更換新編碼器后的常規零位校正方法是什么?永磁交流伺服電機的編碼器相位為何要與轉子磁極相位對齊?
2021-09-27 08:06:54
最近在做永磁同步電機轉子初始角定位,本人的做法是在IPARK環節,給D軸電壓為0,Q軸電壓為正值,想通過此來將轉子在正式啟動前,先對齊到電角度零位上,但是無奈轉子不動沒反應,求前輩指點,感激不盡!
2017-04-26 19:57:30
求大神分享伺服電機轉矩常數的標定方法
2021-09-26 06:26:42
:感應器連線是否牢固,是否經過標定(有線性校正機種必須先進行線性校正). 11、是否以超級用戶密碼進入(軟體保護機種),是否短路校正跳線(鉛封保護機種). 12、卸載后不歸零:零位跟蹤設置是否過小
2011-12-24 08:25:44
:感應器連線是否牢固,是否經過標定(有線性校正機種必須先進行線性校正). 11、是否以超級用戶密碼進入(軟體保護機種),是否短路校正跳線(鉛封保護機種). 12、卸載后不歸零:零位跟蹤設置是否過小
2011-12-28 09:56:58
捷聯式組合導航系統[1],影響系統精度的主要誤差源有:慣性器件的刻度系數誤差、零位誤差及軸安裝不對準角等。為了確保系統的對準和導航精度,必須利用精密轉臺對以上誤差源進行精確標定,并通過系統軟件加以補償。一般情況下,在完成系統標定后,若不對陀螺、加速度計全文下載
2010-04-24 09:31:29
步進電機工作原理與編程方法和控制源程序
本文介紹了步進電機的工作原理與編程方法,以及例出
2008-05-22 09:13:48 316
316 脹差、軸位移是汽輪機監測保護系統最重要的兩項技術參數,從理論和實際調試兩方面闡述了如何正確地鎖定本特利3300系統脹差、軸位移傳感器的測量零位;并就如何避免實際安
2009-06-16 15:50:4723 脹差、軸位移是汽輪機監測保護系統最重要的兩項技術參數,從理論和實際調試兩方面闡述了如何正確地鎖定本特利3300系統脹差、軸位移傳感器的測量零位;并就如何避免實際安
2009-06-23 09:32:446 介紹了一種利用單片機系統裝置中的字位顯示接口直接驅動步進電機的設計方法,采用驅動器IC(集成電路)層疊并聯的創新技術,在不增加原電路板面積的基礎上使驅動功率增
2009-08-29 09:57:1321 提出一種基于凌陽單片機的步進電機加減速的控制方法。采用凌陽科技推出的16位結構工控單片機SPMC75F2413A為控制器,由Allegro公司生產的兩相步進電機專用驅動器件SLA7042M構成步進電
2011-01-05 10:54:48169 步進電機的保持轉矩,近似于傳統電機所稱的“功率”。當然,有著本質的區別。步進電機的物理結構,完全不同于交流、直流電機,步進電機的輸出功率是可變的。
2010-06-12 08:19:261361 步進電機原理,二相八線步進電動機接線方法參考圖及接線介紹。
2015-11-09 16:00:1411 步進電機在51單片機中的應用,適合初學者學習。通過51單片機控制步進電機的方法
2016-02-23 16:51:427 幾種步進電機加減速方法的對比研究及其應用。
2016-05-03 11:44:0212 基于最小偏差法的步進電機速度控制方法研究。
2016-05-03 13:52:593 基于Proteus的步進電機加減速控制輔助設計方法
2016-05-03 13:52:5917 步進電機的精確控制方法研究,有需要 下來看看
2016-05-04 14:35:598 電子、電子信息專業電路單片機學習教程資料——步進電機的精確控制方法研究
2016-08-26 17:02:460 先進的步進電機控制方法
2017-01-23 20:48:1616 單片機控制步進電機的方法研究與應用
2021-11-30 11:55:5810 步進電機是一種感應電機,它的工作原理是利用電子電路,將直流電變成分時供電的,多相時序控制電流,用這種電流為步進電機供電,步進電機才能正常工作,驅動器就是為步進電機分時供電的,多相時序控制器。
2017-06-11 11:34:2934038 介紹了步進電機的工作原理和控制方法, 結合自動線系統,對可編程控制器S7-200的位控向導編程方法進行了闡述 。給出了控制系統的硬件、軟件設計方法,可以直接應用于步進電機實際控制系統中。
2017-09-01 11:00:0211 一、哪些情況需要標定零點 零點是機器人坐標系的基準,沒有零點,機器人就沒有辦法判斷自身的位置。 機器人在如下情況下要重新標定零點: 1.進行更換電機、機械系統零部件之后。 2.超越機械極限位置,如
2017-09-19 18:31:0815 確定標定線,或是為紅外水分儀的零位校準提供思路和判定標準。例如,張蒙生等介紹了紅外水分儀的校準方法以及利用Excel的圖表制作功能計算紅外水分儀校準過程中的斜率與截距。該方法簡單精確,可以準確快速地計算出斜率與截距
2018-03-01 15:50:493 本文開始介紹了步進電機的概念與步進電機分類及優點,其次介紹了步進電機相序的判斷方法,最后介紹了步進電機主要應用領域。
2018-04-25 12:32:3115212 本文開始介紹了步進電機的基本原理,其次介紹了步進電機工作效率以及使步進電機的效率最大化的方法,最后介紹了步進電機選型的步驟與方法。
2018-04-25 14:06:015391 
本文主要闡述了伺服電機編碼器調零對位方法。
2019-11-07 09:29:3990594 其中(1)的高次諧波為主要原因。步進電機使用方波電流驅動,必然含有大量的高次諧波,由此產生振動和噪音。因此驅動電流最好為正弦波。接近正弦波的驅動方法有步進電機的細分步進驅動。下圖為電機1/4細分、半步、整步驅動的振動比較,其振動為依次增加的。
2019-12-10 09:25:3410571 采用帶停轉檢測的專用電機驅動芯片。這種芯片在電機停轉時,能夠立刻檢測到電機處于停轉狀態,從而確定零點位置。
2020-03-23 11:32:5310334 本文主要闡述了步進電機驅動器調速方法及步進電機驅動器的作用。
2020-04-20 09:10:2812230 渦街流量計零位偏高是指工藝管道沒有流量時儀表有流量顯示,即無流量時轉換器仍有大于4mA的電流信號,使顯示儀的讀數大于零。
2020-06-21 10:18:181581 步進電機和伺服電機的辨別方法如下:力矩范圍:步進電機系統一般為中小力矩(一般在40Nm以下)范圍;伺服電機系統可實現全范圍。
2020-09-11 10:27:1710007 而絕對型的位置是由輸出代碼的讀數確定的。在一圈里,每個位置的輸出代碼的讀數是唯一的;因此,當電源斷開時,絕對型編碼器并不與實際的位置分離。如果電源再次接通,那么位置讀數仍是當前的,有效的;不像增量編碼器那樣,必須去尋找零位標記。
2021-06-13 16:05:005239 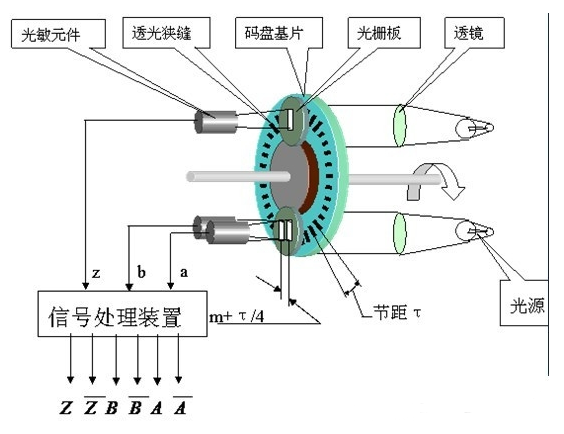
關斷切斷閥對流量零位示值進行檢查和校驗是流量示值驗證的首要任務。這是因為流量計零位如果不準,將對量程范圍內的各點示值都產生影響。在作零位檢查和校驗時應注意以下事項。
2022-10-09 08:11:063334 和相位標靶上的相應點進行標定。提出了一種補償畸變的迭代算法。為了提高相位標靶的精度,還提出了一種二維擬合和插值的方法。與傳統的標定方法相比,該方法不依賴于畸變數學模型,并且在復雜的畸變條件下是穩定
2023-01-05 10:18:322241 在新開始的“步進電機”篇系列文章中,將介紹步進電機的結構、步進電機的工作原理、步進電機的特性和步進電機的驅動方法。什么是步進電機?步進電機是一種可以與脈沖信號同步準確地控制旋轉角度和轉速的電機,步進電機的也稱為“脈沖電機”。
2023-02-24 09:51:093540 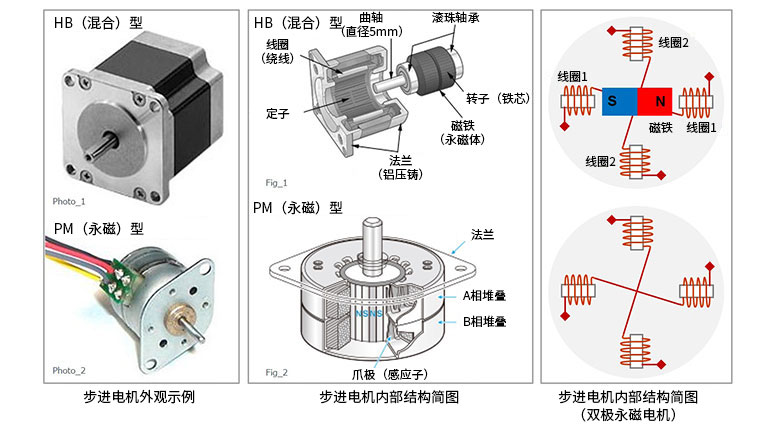
到目前為止,我們已經介紹了步進電機的結構和步進電機的驅動方法。本文在表格中簡要匯總了步進電機的特征及步進電機應用。
2023-02-24 09:51:122288 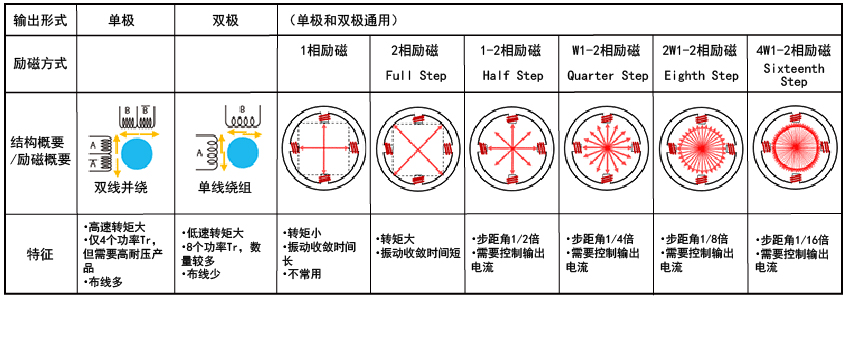
最簡單的步進電機驅動方法是單相雙極驅動方式,也稱為雙相步進驅動方式。該方式只需要使用一個 H橋驅動器和一個脈沖發生器,即可實現步進電機的驅動控制。
2023-03-08 14:21:5616851 另外,步進電機的牽入轉矩特性和失步轉矩特性會因勵磁方法和驅動電路而異。因此,對步進電機的特性研究中,需要進行包括驅動方法和電路在內的整體評估。
2023-03-09 11:52:282064 
從本文開始,將介紹兩相雙極步進電機和兩相單極步進電機的驅動電路,以及兩相雙極步進電機和兩相單極步進電機的驅動方法。首先介紹雙極連接和單極連接。
2023-03-10 09:14:051799 
同步電機啟動時需要找到電機運行的零相位位置,這是因為同步電機的轉子沒有起動能力,必須在公共交點處與電網同步,同步后才能啟動。如果沒有找到零位,電機無法與電網同步,也無法啟動。
2023-03-10 15:46:004819 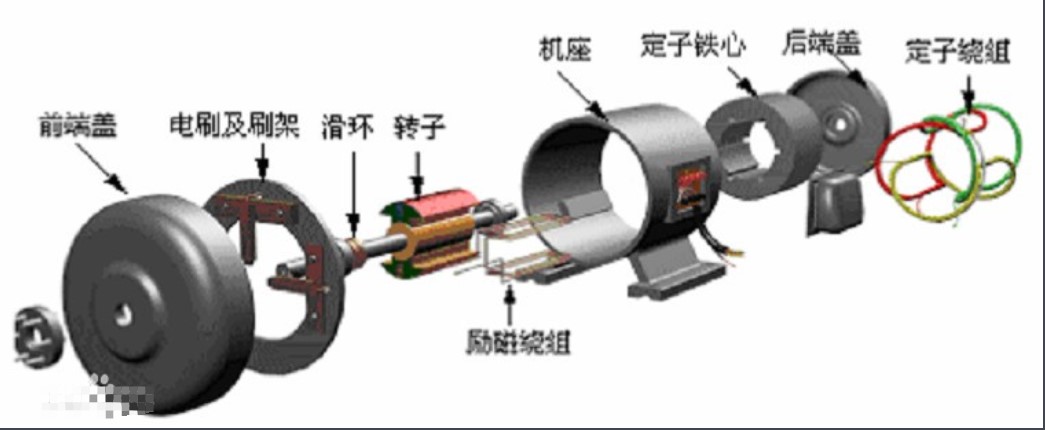
伺服電機編碼器在更換了相應的編碼器以后,基本上都要進行相應的調零對位。伺服電機編碼器調零對位一般設計到伺服電機編碼器的拆除,在拆除伺服電機編碼器時要對伺服電機編碼器的安裝位置進行記錄,保證伺服電機的正常云運行。?
2023-03-10 16:30:5919327 應用的電感測量方法原理、
步驟及優缺點。直流暫態法原理簡單,操作容易,但必須知道準確的電機相對零位,并用外部夾具將電機轉子固定在相對零
位,所以相對零位的精確度會直接影響該方法的準確性。交流穩態法的測量步驟相對繁瑣
2023-03-13 10:48:466 “Negitive(反轉)” 按鍵時,控制步進電機反
轉;按下“加速”按鍵時,控制步進電機加速;按下“減速” 按鍵時,控制步進電機減速。4位數碼管,左邊兩位顯示正反
轉,正轉顯示“11”,反轉顯示“00”,右邊兩位顯示轉速檔次,步進電機的轉速1~30檔在右邊兩位
2023-03-21 15:25:244 為增進大家對步進電機的認識,本文將對步進電機的選型步驟以及方法予以介紹。 步進電機是電機諸多類型中的一種,同時也是其中步進電機應用非常廣泛的一種。為增進大家對步進電機的認識,本文將對步進電機的選型
2023-03-22 09:38:333 步進電機是一種感應電機,它的工作原理是利用電子電路,將直流電變成分時供電的,多相時序控制電流,用這種電流為
步進電機供電,步進電機才能正常工作,驅動器就是為步進電機分時供電的。雖然步進電機已被
2023-03-23 10:50:161 一、步進電機的控制使用LD語言實現 ? ? ? ?在該程序段中,涉及X、Y軸動作有,單次相對位置運動、點動、回零、當前位置設為零位、停止等。 ? ? ? ? ? ? ?二、按照預設路徑進行
2023-03-23 11:42:000 為了評估步進電機的特性必須要有必要的測量方法。本章針對步進電機的基本特性①靜態特性:靜態轉矩特性,步進角度精度;②動態特性:速度-轉矩特性;③暫態特件;介紹各種測量方法。并且進一步
說明引起步進電機產生振動和噪音的原因,以及振動和噪音的測量方法。
2023-03-23 10:00:441 步進電機基礎(8.3)-步進電機的問題解決方案-改善暫態特性的解決方法 前言 基本信息 前言說明 8.3 改善暫態特性的解決方法 1. 利用阻尼器的改善 2 . 利用驅動電路的改善 (1) 半步進
2023-03-24 11:05:350 下述兩種調法完全取決于你的手工能力和熟練程度,一般來說,每款伺服電機都有自己專門的編碼器自動調零軟件.不外傳僅是出于商業羸利和技術保密.如果你是一家正規的維修店,請不要采用以下方法,應通過正常渠道
2023-05-19 10:42:358910 步進電機能精確控制進氣量從而達到溫度的準確控制,新一代燃氣熱水器便是使用步進電機代替常規燃氣比例閥,進行燃氣輸出控制模塊。步進電機只能檢測增量信息,而初始的零位檢測一般采用霍爾開關的方案。熱水器行業
2022-07-27 14:31:051430 
伺服電機編碼器一般由伺服電機廠根據設計需要確定零位角度,如果后期維修無法確定先前零位,只好自我找零位,這種找零方法比較麻煩。本文將詳細介紹編碼器中確定零位的方法以及怎樣找零點的過程。
2023-07-26 10:23:0420253 步進電機能精確控制進氣量從而達到溫度的準確控制,新一代燃氣熱水器便是使用步進電機代替常規燃氣比例閥,進行燃氣輸出控制模塊。步進電機只能檢測增量信息,而初始的零位檢測一般采用霍爾開關的方案。熱水器行業
2022-07-19 15:50:121775 
,Page4,5,6,7用于零點位置,ABZ輸出分辨率等,具體OTP的頁碼分配見寄存器表。Page4~page7多頁設置用于用戶多次編程,每頁用完后如果需要更新編程值,需要
2023-10-25 15:52:261258 
在機器人零點校正時,軸被移到一個定義的機械位置,即所謂機械零位。如果機器人在這機械零位, 那么每個軸的絕對傳感器值被存儲。零點標定目的是使機器人各軸的軸角度與連接在各軸電機上的絕對值編碼器的脈沖計數值對應起來的操作。具體而言,是為了求取零度姿勢的脈沖計數值的操作。
2023-11-19 16:19:415042 
步進電機的控制方法以及所需的控制信號。 步進電機的控制方法主要分為開環控制和閉環控制兩種。 開環控制是指根據預定的電流和時間控制信號來驅動步進電機,根據電流和時間的確定性,可以較精確地控制電機的角度和速度。開
2023-12-20 11:21:246812 在伺服電機系統中,通常會有兩個重要的參考位置,即伺服電機零點和原點。伺服電機零點是指電機的初始位置,也可以理解為初始零位或歸零位置。
2024-01-05 10:27:026887 ,還能輕松驅動步進電機。本文將詳細介紹Arduino驅動步進電機的原理、方法和應用。 步進電機基礎知識 1.1 步進電機概述 步進電機是一種將電脈沖信號轉換為機械位移的電動機。與直流電機相比,步進電機具有定位精度高、扭矩大、響應速度快等
2024-01-14 16:37:375250 一些編碼器會在其旋轉軸上標記一個特殊的標記點,例如一個凹槽或凸起。通過在編碼器旋轉到特定位置時對標記點進行檢測,可以確定零位。
2024-01-18 14:49:403857 步進電機控制方法 步進電機是一種將電信號轉化為機械轉動的電動機,其輸出轉角是按照電脈沖控制信號的變化而變化的。步進電機的控制方法有幾種常見的方式,包括全步進控制、半步進控制和微步進控制。 全步進控制
2024-01-22 17:18:182072 步進電機正反轉的換線方法 步進電機是一種常見的電機類型,它具有正反轉的能力。換線是指改變步進電機的電源連接方式,以改變其運動方向。換線方法有很多種,下面將詳細介紹其中一種常見的換線方法。 步進電機
2024-01-23 14:45:516172 伺服電機編碼器調零對位是指通過調整編碼器的零位來使得電機的位置精準對位。編碼器是一種能夠將物理量轉換為電信號的裝置,它可以測量電機轉動的角度或位置。 在進行伺服電機編碼器調零對位之前,我們首先要
2024-01-25 11:32:087734 ? ? ? 步進電機是一種常見的電機類型,它具有正反轉的能力。換線是指改變步進電機的電源連接方式,以改變其運動方向。換線方法有很多種,下面將詳細介紹其中一種常見的換線方法。 ? ? ??步進電機
2024-01-26 08:47:534448 
步進電機是一種將電脈沖信號轉換為角位移的電動機。它具有準確性、控制性和可靠性強的特點,在許多領域得到廣泛應用,例如機械、儀器設備、電子信息等。理解步進電機的工作原理以及最簡單的驅動方法,有助于更好
2024-02-04 09:13:233045 旋變的標定在日常工作中有很多通俗的說法,比如說零位角標定、電機角標等等。雖然說法不同,但是內容及功能是一致的,就是要知道旋變的零位與電機的零位之間的角度偏差。
2024-04-20 09:42:453988 
步進電機,作為一種將電脈沖信號轉換為角位移或線位移的開環控制元件,在現代工業自動化、精密測量、機器人技術等領域中扮演著舉足輕重的角色。步進電機的驅動方法直接決定了其運動精度、穩定性和響應速度。本文將詳細探討步進電機的幾種主要驅動方法,并通過分點表示和歸納,力求為讀者提供清晰、全面的信息。
2024-06-05 17:55:563505 步進電機驅動器作為控制步進電機運行的關鍵設備,其性能的穩定性和精確度直接影響到整個系統的運行效果。撥碼開關作為步進電機驅動器的一個重要組成部分,其設置和調節對于保證步進電機的正常運行至關重要。本文將詳細介紹步進電機驅動器撥碼開關的調節方法,旨在幫助讀者更好地理解和應用這一技術。
2024-06-11 14:37:037920 研控步進電機接線是一個技術性很強的工作,需要對步進電機的工作原理、接線方式以及控制方式有深入的了解。本文將詳細介紹研控步進電機的接線方法,包括接線前的準備工作、接線步驟、注意事項等,以幫助您更好
2024-06-12 09:14:152719 將詳細介紹步進電機驅動器的計算方法。 步進電機的基本原理 步進電機是一種電磁式電機,其工作原理是利用電磁力的作用使轉子產生角位移。步進電機主要由定子和轉子兩部分組成。定子上有多個繞組,通過改變繞組的電流方向
2024-06-12 09:41:513725 步進電機作為一種精密的控制電機,其方向控制對于許多應用至關重要。本文將詳細介紹幾種改變步進電機方向的方法,并通過分析這些方法的工作原理和實際應用,為讀者提供深入的理解和操作指導。
2024-06-14 09:56:187526 步進電機,作為一種將電脈沖信號轉換為角位移或線位移的精密控制電機,其正反轉的實現對于許多應用至關重要。本文將深入探討步進電機正反轉的實現方法,從基本的控制原理到具體的實現步驟,再到實際應用案例,旨在為讀者提供全面、深入的指導和參考。
2024-06-14 09:58:117153 伺服電機編碼器調零對位是確保伺服系統精確控制的關鍵步驟之一。本文將詳細介紹伺服電機編碼器調零對位的方法,包括機械對中、電氣對中、軟件對中和自適應對中等,以及各種方法的優缺點和適用場景。 機械對中
2024-06-17 10:54:005325 問題: THDP0100TMDP0200示波器探頭,偏置零位調整步驟是什么? 答案: THDP0100/0200 TMDP0200偏置零位調整步驟 偏置零位 只有這些步驟適用于所有序列號的探頭
2024-08-19 11:03:521429 步進電機的伺服控制方法主要包括以下幾種: 1. 位置模式 定義 :在位置模式下,步進伺服電機根據輸入的位置指令,通過閉環控制系統精確控制電機轉子的位置。 工作原理 :控制器會根據位置誤差調整驅動電流
2024-09-04 09:48:041793 電子發燒友網站提供《有刷電機和步進電機電流調節的配置方法.pdf》資料免費下載
2024-09-23 11:05:371 電機能夠實現高精度的位置控制和速度控制。本文將詳細介紹步進電機的控制實現方法,包括基本的控制原理、常見的控制策略以及實際應用中的注意事項。 ? ? ? 一、步進電機的基本控制原理 ? ? ? 步進電機又稱為脈沖電機,其最大特
2025-01-21 16:43:462503 
 電子發燒友App
電子發燒友App








 工商網監
工商網監
評論