從太空機器人到醫(yī)療領域可見的手術機器人,機械臂都不可或缺,占據(jù)著重要地位。那么,不同機械臂是如何實現(xiàn)控制抓取呢?它與自由度有什么關系嗎?
2016-12-13 14:52:05 4407
4407 臂來執(zhí)行復雜的外科手術。在之前的文章中,我們3D打印了機械臂,并使用MG995伺服電機制作了機械臂。我們將再次使用相同的3D打印機器人手臂,通過Arduino Nano、MPU6050陀螺儀和彎曲(Flex)傳感器制作手勢控制的機器人手臂。 通過
2021-01-13 16:21:136963 一種機械臂,可通過帶有傳感器的手套無線模擬您的手部運動。
2022-09-19 16:01:337077 
想象中的難. 底板看上去臟兮兮的,撕了保護膜后,很光滑,有光澤. 三維組裝視頻到這就完了,后面發(fā)現(xiàn)還有人聲的組裝教程. 底部上齊尼龍柱,整個機械臂更加穩(wěn)了. 電池1500mAh,控制板是基于51
2017-07-17 16:42:59
51單片機怎么處理機械臂數(shù)據(jù)
2023-10-31 06:29:13
有沒大神熟悉六軸機械臂控制編程的,伺服電機驅(qū)動,有會的覓我,***,微信同號,有償服務
2018-10-18 17:37:19
機械臂仿真控制
2020-09-29 19:23:16
機械臂向前運動1cm,就是運動1cm)。這種控制在涉及到接觸作業(yè)時就會產(chǎn)生麻煩,因為現(xiàn)實環(huán)境是充滿各種誤差的,位置上很小的誤差,經(jīng)過大剛度的放大會產(chǎn)生很大的接觸力,誤差被放大。在位置精度要求高的且環(huán)境
2022-02-23 07:49:01
正運動學反過來,對于我們的機械臂而言,也就是已知末端執(zhí)行器的位置和朝向,求每個關節(jié)的角度。我們的機械臂的三維運動是比較復雜的,這里為了簡化模型更加便于大家的理解,我們對模型進行精簡,先去掉下方云臺的...
2022-01-20 06:46:45
機械臂仿真,用什么軟件效果比較好?
2018-01-18 16:50:01
`上一篇中,我們介紹了通過UART接口實現(xiàn)NanoPC-T4對步進電機的控制今天,我們來做個機械手支架,把步進電機安裝上去,變成有作用的機械手首先值得一提的是NanoPC-T4的處理能力很強,用它做
2018-10-27 16:48:02
(并不)常見的五自由度機械臂。盡管商家稱它為六自由度。這里使用STM32F407VGT6的6路PWM輸出通道來控制6個舵機的運動,樹莓派(上位機)通過USB轉(zhuǎn)TTL模塊與STM32進行串口通訊PWM舵機控制原理標準的 PWM 舵機有三條控制線,分別為:電源、地及信號線。市面上大多數(shù)180°舵機需要的PW
2021-07-01 10:24:21
上配置了一塊64M的HyperRAM,用作圖像存儲進行銳化算法。三.機械臂控制部分使用樹莓派做圖像的接收和機械臂的控制,使用TensorFlow,預先訓練的神經(jīng)網(wǎng)絡上運行簡單的圖像分類。然后對識別
2021-05-11 21:48:41
申請理由:申請了個基于leapmotion智能機械臂的創(chuàng)新項目,現(xiàn)在申請到了國家的補助,希望用藍牙來完成傳輸部分,減少開發(fā)成本,完善開發(fā)穩(wěn)定項目描述:體感的傳感器基于leapmotion的攝像頭和紅外傳感器,用藍牙來傳輸數(shù)據(jù)到機械臂上,模仿人類的手部動作來完成機械臂的行動
2015-08-08 12:12:38
申請理由:項目描述:檢驗系統(tǒng)流暢性,包括外觀布局,以及硬件電路分布的合理性。做過基于PLC的機械臂控制,現(xiàn)在想控制成本,做基于STM32的機械臂控制。
2016-10-28 16:08:46
項目名稱:機械臂語音定位試用計劃:1、使用拾音與語音識別功能,并調(diào)試WIFI連接功能2、調(diào)試語音反饋,在做語音控制的同時完成智能語音反饋3、設計機械臂用于惡劣環(huán)境下作業(yè)人員無法達到的地方,并且在無
2017-05-24 16:13:35
眾為興SCARA四軸機械臂編程(一)概述方案原理功能實現(xiàn)通訊功能機械臂編程整體結(jié)構(gòu)參考代碼要點概述近年來工業(yè)機器人應用普遍,可以代替工廠普工完成簡單的搬運、裝配,分揀等工作。筆者給廠里的眾為興機械臂
2021-07-20 07:45:24
題目是基于DSP的三關節(jié)機械臂軌跡跟蹤控制系統(tǒng)設計主要任務是以DSP-TMS320F2812控制器作為機械臂底層驅(qū)動控制器,編寫機械臂運動控制驅(qū)動代碼;然后利用目標跟蹤算法,結(jié)合實驗平臺,實現(xiàn)機械臂
2017-04-10 21:42:39
本帖最后由 tangwentao 于 2019-12-16 15:14 編輯背景: 公司本來搞軟件的,現(xiàn)在跟別人合作,要搞個機械臂的東西。要求: 1.這個機械臂要搭載一個攝像頭,然后由于機械臂的運動
2019-12-16 15:33:13
昨天真的有被這個天才少年震驚到!只能說佩服!看看別人的國慶節(jié),硬生生造了一只鋼鐵俠的機械臂!而我......依舊是來自華為天才少年稚暉君,還是他迄今為止搞的項目中,最復雜的那種。來吧,展示 —— 給
2021-10-11 11:29:42
One設計了基于三球的機械臂,讓檢測傳感器、夾具和操作員觸覺反饋的精確定位成為可能,這提高了目前無人駕駛地面車輛(UGV)的可用性。三球機械臂提高了工作封套和UGV檢測硬件的精度,因此讓它能夠挖掘
2015-02-12 15:56:16
文章目錄三軸機械臂的控制原理三軸機械臂接線三軸機械臂控制垂直坐標系控制立體空間坐標系控制三軸機械臂的控制原理參考我寫的博客:Algorithm——逆解算三軸機械臂運動公式得到運動坐標三軸機械臂接線
2021-12-13 07:14:08
基于RGB-D相機與機械臂的三維重建無序抓取系統(tǒng)有哪些關鍵技術?如何去開發(fā)一款基于RGB-D相機與機械臂的三維重建無序抓取系統(tǒng)?基于RGB-D相機與機械臂的三維重建無序抓取系統(tǒng)是由哪些部分組成的?
2021-09-08 06:12:06
如何對機械臂的關節(jié)速度進行動態(tài)繪圖?
2021-11-03 06:05:38
目的 本文手把手教你如何在 Mathematica 軟件中搭建機械臂的三維仿真環(huán)境,包括以下幾部分: 1. 如何導入機械臂的三維模型; 2. 如何進行(正/逆)運動學仿真; 3.
2021-09-07 09:25:13
很多小伙伴在使用ROS的時候,都會產(chǎn)生類似的疑問,程序?qū)戇^那么多,仿真也跑過不少,但是如何控制真實機械臂/機器人呢?今天古月君就來嘗試破個題。首先,解決這個問題的關鍵詞是“接口”。所謂接口,即
2021-09-07 09:12:55
如何通過arduino單片機和機械臂零件設計一個手柄操控自學習機械臂模型?
2022-01-24 06:37:22
如何通過步進電機去控制機械臂?如何通過步進電機去實現(xiàn)一種插補算法?
2021-07-08 06:54:36
? 00機械臂的改動今天(2020-09-28 09:14:46)對新改進的機械臂進行整體調(diào)試。機械臂的改動包括有:在肩部關節(jié)對于 57HSXXXXEIS一體化步進伺服驅(qū)動電機 增加了α=1:10
2021-09-03 09:24:52
工業(yè)機械臂搬運工第一章緒論1.1 本課題研究的背景及意義1.2 機械臂在工業(yè)的應用現(xiàn)狀1.3 本課題研究內(nèi)容第二章機械臂工作流程2.1 步進電機工作的基本原理2.2 按鍵控制步進電機工藝流程2.3
2021-11-29 07:19:20
如何實現(xiàn)基于Arduino的PS2機械臂偏小車的設計?
2021-10-19 06:02:01
怎樣去設計一種基于3D打印機的Delta機械臂?有哪些操作步驟?
2021-10-11 08:17:39
現(xiàn)在確定的功能大致如下: 一:賬號登入系統(tǒng)二:基礎功能的遙控:底盤控制,機械臂控制(空間角度機械臂自動調(diào)整為平衡,可通過特殊動作鍵進行控制,控制版空間角度可通過按鍵完成),拍照,燈光控制。三:一鍵
2017-04-26 16:48:42
新手求助怎樣通過ROS去控制機械臂呢?其PRU匯編程序該怎樣去實現(xiàn)呢?
2021-12-21 06:32:14
智能小車如何與機械臂相結(jié)合?
2021-12-27 06:15:24
前言:有個把月沒更新博客了,一是有點忙,二來也不是特別想寫博客。上個月主要是在搭建永磁同步電機和機械臂聯(lián)合仿真的模型,最后仿真效果還算良好,應該算完成了。永磁同步電機與機械臂的聯(lián)合simulink
2021-08-30 06:31:51
有些機械臂控制的問題請教大神
2018-01-08 17:18:53
計算出運行路徑(三維),把極坐標的機械臂相對于直角坐標的機床的優(yōu)勢充分發(fā)掘出來,現(xiàn)在比較粗糟,見笑了!注:機械臂的模型是從互聯(lián)網(wǎng)上下載的,我只是把它轉(zhuǎn)換為WRL文件而已,我非常感謝原作者!感謝NI公司
2014-11-16 16:01:45
碳纖維機械手臂、碳纖維機械臂、碳纖維工業(yè)機械手廣泛應用在機器人、數(shù)控設備、機械設備自動化產(chǎn)品方面。產(chǎn)品的輕量化和高強度大大提高了機械手臂的工作效率和節(jié)能的效果。其次還具有重量輕、強度高、耐高溫
2020-04-24 14:37:59
本設計能夠成功的完成空間站的物品打掃,設計指標是按照空間站的物品打掃設計,進行DH建模,對機械臂求逆解,同時防誤撞的核心思想是用RRT算法規(guī)劃出一條路徑,讓機械臂的末端繞過遮擋物品從而到達需要到達的位置。...
2021-09-07 06:38:08
舵機怎么調(diào)機械臂
2016-07-30 09:01:45
五軸機械手主臂的負載慣量是如何去計算的?五軸機械手主臂的負載轉(zhuǎn)矩是如何去計算的?
2021-06-28 09:17:36
請問如何通過ROS控制真實機械臂?
2021-10-13 08:25:50
LabVIEW8.2的強大功能,我們得以在短時間內(nèi)完成了控制系統(tǒng)的開發(fā),同時保證了機械臂的運動精度與負載能力。四自由度機械臂機械系統(tǒng) 本文討論的四自由度機械臂面向中小型物流系統(tǒng)應用。其基本的設計要求為:實用、有
2019-05-06 09:26:38
工廠機械臂人員闖入自動預警系統(tǒng)基于AI視覺圖像識別算法,工廠機械臂人員闖入自動預警系統(tǒng)通過實時監(jiān)測工作區(qū)域內(nèi)的人員位置和機械臂設備的運行狀態(tài),實現(xiàn)對人員闖入的識別和預警。一旦系統(tǒng)檢測到人員闖入作業(yè)區(qū)
2024-08-27 20:32:40
兩臂繪圖機械手
一、任務設計一套機械手系統(tǒng),該系統(tǒng)有兩個固定長度的臂(AB、BC)和兩個轉(zhuǎn)軸(轉(zhuǎn)軸1、轉(zhuǎn)軸2)構(gòu)成。在轉(zhuǎn)軸1 和
2009-08-02 08:37:112192 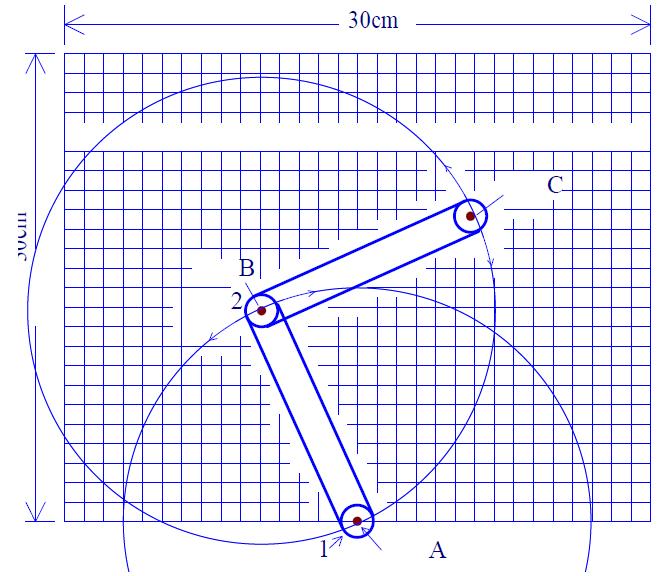
谷歌Pixel手機推出后,有報道稱,在選擇HTC代工之前,谷歌接洽了華為,考慮到Nexus 6P的成功經(jīng)驗,希望能促成合作,但最終被后者拒絕。據(jù)說原因是谷歌要求手機僅保留Pixel這一標識,不能出現(xiàn)代工品牌,在獲悉HUAWEI不能在手機本體甚至包括包裝、紙片等位置出現(xiàn)的時候,華為慎重考慮后選擇放棄。
2016-11-15 16:50:33745 谷歌(微博)對于未來有一個大膽的憧憬,但是它首先要避免再犯過去犯過的錯。
2017-03-06 16:37:471350 機械臂的運動軌跡是指通過給定的路徑的起點與終點,以及機構(gòu)本身或者機構(gòu)運行所存在的約束條件,求出每個關節(jié)的位移S,速度v,加速a的完整過程。 文中采用笛卡爾空間的網(wǎng)弧插值法使得機械臂運動平滑。笛卡爾
2017-11-03 10:26:01 10
10 隨著計算機、自動化技術和原子能技術的飛速發(fā)展,機器人被廣泛應用于航空航天、工業(yè)自動化和智能裝備等行業(yè),在軍事和國民工業(yè)領域有著廣闊的發(fā)展前景。 在機器人工業(yè)中,機械臂作為機器人操作的支撐部件,為末端
2018-01-19 14:34:267 針對取件機械臂存在的絕對定位精度低、成本高等問題,采用基于定位精度可靠度的評價方法對機械臂進行了可靠性優(yōu)化設計。使用多體系統(tǒng)理論建立了機械臂的靜態(tài)誤差模型,基于蒙特卡羅法對其定位精度進行了分析,并得
2018-03-02 15:11:143 外對連續(xù)型機械臂的設計多采用電機或氣動伺服肌肉來驅(qū)動,WALKER等研制了繩索驅(qū)動的機械臂。針對工業(yè)使用的大功率連續(xù)型機械臂研究較少,英國某公司研制出用于工業(yè)現(xiàn)場探查與檢修用的柔性機械臂。 針對大功率連續(xù)型機械臂關節(jié)運動
2018-03-05 13:48:580 的電機和諧波減速器進行了選型,通過實驗計算了不同關節(jié)角度的轉(zhuǎn)矩,確定了最終的選擇方案;然后,利用Ansvsworkbench對機械臂的關鍵零部件進行了有限元分析,得出了機械臂第二關節(jié)等重要部件的應力和位移云圖,從體積布局以及工作模式等角度進
2018-03-15 16:33:323 針對機械臂的實時控制問題,基于約束預測控制,提出了一種機械臂實時運動控制方法。介紹了機械臂動力學模型并進行了線性化處理,以降低算法復雜度、保證實時性。設計了軌跡跟蹤控制器和約束預測控制器,其中軌跡
2018-03-26 09:33:041 首先告訴大家,我們所說的“路徑”的是后者——trajectory。我們看一下這兩種“路徑”在機械臂的世界里有什么區(qū)別。
2019-04-20 10:52:509714 
我計劃最終為該機械臂創(chuàng)建3D模型,并在爪子和馬達上進行擴展,以便實際上可以成為功能齊全的機械臂。
2019-10-09 09:31:4716585 遙控機械臂套裝,本套裝可以通過Arduino編程控制一個桌面機械臂,還可以用WII手柄控制機器人哦。
2019-11-29 17:19:132994 
主要闡述機械臂手冊的使用說明。
2021-03-22 16:09:3017 為什么要進行機械手臂路徑規(guī)劃? 隨著科技的發(fā)展,機械臂由最初的簡單平面搬運逐漸發(fā)展到現(xiàn)在的立體三維空間搬運,其任務的難度大大提升。因此,在搬運過程中如何精確快速地抓取目標物體,成為機械臂發(fā)展亟需
2021-07-12 17:23:323278 本文比較了機械臂和移動機器人兩種工業(yè)機器人的控制系統(tǒng)方案,對其特點進行了介紹。 以上分類是根據(jù)應用對象,此外,市面上更多的是通用型運動控制器,即控制非標設備的。 1 控制器底層方案1.1 機械臂類
2021-07-22 17:37:344171 工業(yè)機械臂搬運工第一章 緒 論1.1 本課題研究的背景及意義1.2 機械臂在工業(yè)的應用現(xiàn)狀1.3 本課題研究內(nèi)容第二章 機械臂工作流程2.1 步進電機工作的基本原理2.2 按鍵控制步進電機
2021-11-19 12:21:0872 的零件組成,可以沿著水平、垂直等軸面進行多自由度運動,從而代替人工完成抓取、移動,甚至于更精密的操作。被廣泛應用于工業(yè)、醫(yī)療、軍工、航空航天領域。而在機械臂出廠質(zhì)檢過程中,必不可少的需要用到線束測試儀來
2021-12-14 11:34:043471 
機械臂向前運動1cm,就是運動1cm)。這種控制在涉及到接觸作業(yè)時就會產(chǎn)生麻煩,因為現(xiàn)實環(huán)境是充滿各種誤差的,位置上很小的誤差,經(jīng)過大剛度的放大會產(chǎn)生很大的接觸力,誤差被放大。在位置精度要求高的且環(huán)境
2021-12-31 18:57:3111 小機械臂進行解鎖后,小機械臂在軌測試逐步展開。科研人員首先對機械臂的各項產(chǎn)品進行檢查,其檢查內(nèi)容主要包括了控制器狀態(tài)確認、關節(jié)檢查、末端檢查等。
2022-08-29 15:39:461217 臂的搭建,開發(fā),代碼調(diào)試,及進階。 MyCobot消費級的機械臂有四種型號的機械臂,M5版本、Pi版本、Arduino版本、JN版本,這里我主要以樹莓派的Cobot作為我們教學的設備。 一:開箱 1、標準配置的設備開箱主要有以下幾個部件 2、固定機械臂 這里強烈建議初學者要
2022-09-30 10:00:502137 
電子發(fā)燒友網(wǎng)站提供《機械臂制作案例.zip》資料免費下載
2022-10-28 09:26:596 電子發(fā)燒友網(wǎng)站提供《DIY機械臂.zip》資料免費下載
2022-11-08 10:32:222 電子發(fā)燒友網(wǎng)站提供《迷你機械臂構(gòu)建.zip》資料免費下載
2022-11-11 11:16:040 電子發(fā)燒友網(wǎng)站提供《機械臂開源硬件.zip》資料免費下載
2022-12-01 15:27:386 一個微型的三自由度機械臂,您甚至可以記錄運動并循環(huán)它!
2022-12-07 14:00:370 未來的趨勢絕對是機器人代替人工作業(yè),機械臂首當其沖。如今機械臂工業(yè)化已經(jīng)比較成熟,許多人都開始對機械臂感興趣,想要學習的話手里肯定得有一臺機械臂幫助學習,那么選擇一款機械臂是相當重要的一個步驟。因為
2022-12-09 17:41:502887 
電子發(fā)燒友網(wǎng)站提供《最簡單的機械臂.zip》資料免費下載
2022-12-13 11:03:311 電子發(fā)燒友網(wǎng)站提供《無線機械臂開源硬件.zip》資料免費下載
2022-12-27 09:44:420 電子發(fā)燒友網(wǎng)站提供《使用EMG信號控制機械臂.zip》資料免費下載
2022-12-29 11:40:102 電子發(fā)燒友網(wǎng)站提供《人臂控制機械臂開源.zip》資料免費下載
2023-01-31 14:43:054 電子發(fā)燒友網(wǎng)站提供《Python控制的機械臂開源分享.zip》資料免費下載
2023-02-03 10:06:543 電子發(fā)燒友網(wǎng)站提供《如何制作機械臂.zip》資料免費下載
2023-02-08 09:46:060 使用一個桌面型的六軸機械臂,在機械臂的末端安裝一個攝像頭,來進行 人臉識別和跟蹤 的一個功能。該功能分為兩個模塊,一個是 人臉識別模塊 ,另一個是 機械臂的運動控制模塊 。 ? 在前文有介紹到
2023-02-10 16:07:282624 
使用語音控制myCobot機械臂運動
2023-03-17 18:13:232095 
近期回校上最后一門課,剛好是做機械臂有關的題目,所以寫文記錄一下。主要實現(xiàn)的是可以自動識別獲取快遞位置,機械臂可以抓取快遞,以及根據(jù)自動識別快遞上的條形碼獲得目的地點,機械臂可
以將快遞抓取并移動
2023-05-18 10:53:415 電子發(fā)燒友網(wǎng)站提供《PC控制的機械臂設計.zip》資料免費下載
2023-06-12 10:41:592 電子發(fā)燒友網(wǎng)站提供《構(gòu)建一個簡單的機械臂.zip》資料免費下載
2023-06-14 14:55:151 電子發(fā)燒友網(wǎng)站提供《超級精確的300歐元機械臂.zip》資料免費下載
2023-06-25 15:51:180 電子發(fā)燒友網(wǎng)站提供《機械臂:Arduino + Matlab.zip》資料免費下載
2023-06-28 15:28:322 電子發(fā)燒友網(wǎng)站提供《Bracc.ino機械臂開源分享.zip》資料免費下載
2023-06-30 10:32:460 機械臂是一種由多個關節(jié)連接而成的機械結(jié)構(gòu),類似于人的胳膊。它通常具有可旋轉(zhuǎn)或可伸縮的關節(jié),使其能夠在空間中執(zhí)行精確的定位和操作。機械臂通常由電機、傳感器、控制系統(tǒng)和執(zhí)行器組成。工業(yè)機器人是一種自動化
2023-09-19 10:13:121479 
剛性機械臂 機械臂建模是機械臂控制的基礎,控制效果的好壞很大程度上決定于所建立的動力學模型的準確性。 目前對剛性機械臂的動力學建模方法較多,理論較為成熟。而對于柔性空間機械臂的精確建模尚處在研究階段
2023-11-17 17:03:341706 柔性機械臂 剛性機械臂建模方法已經(jīng)可以有效地求解出機械臂各部分之間的耦合情況,但是對于柔性機械臂的動力學建模其側(cè)重點在于基于剛性機械臂建模方法的基礎上如何有效的處理機械臂關節(jié)柔性以及臂桿柔性
2023-11-17 17:12:051680 處理技術,使用ArUco標記的機械臂系統(tǒng)可以實現(xiàn)更高級的自動化功能,如精確定位、導航和復雜動作的執(zhí)行。 本案例旨在展示結(jié)合ArUco標記和機械臂運動控制技術,實現(xiàn)對機械臂的高精度控制和姿態(tài)跟蹤。通過分析和解釋腳本的不同組成部分
2023-12-18 11:14:572221 
——來自迪文開發(fā)者論壇本期為大家推送迪文開發(fā)者論壇獲獎開源案例——四軸機械臂控制系統(tǒng)。工程師采用T5L智能屏,基于DGUS軟件“旋轉(zhuǎn)指示”控件實現(xiàn)機械臂的實時位置顯示,并通過串口控制機械臂的運動
2023-12-23 08:13:192408 
1.背景介紹 機械臂的位置控制是機械臂最重要的功能。機械臂的位置控制精度也是研究者及工程師一直關注的問題。本文梳理下機械臂位置控制的一些發(fā)展脈絡,幫助大家提高對其的認識以及如何去提升機械臂的位置
2024-03-05 08:43:252334 
和智能化的任務,提升了人機協(xié)作的效率和效果。我們個人平時接觸不太到機械臂這類的機器人產(chǎn)品,但是有一種小型的機械臂我們?nèi)巳硕伎梢該碛兴黰yCobot,價格低廉的一種桌面型機械臂。 案例介紹 本文介紹同濟子豪兄開源的一個名為“vl
2024-07-03 14:09:052286 
機械臂是一種由多個關節(jié)連接而成的機械結(jié)構(gòu),類似于人的胳膊。它通常具有可旋轉(zhuǎn)或可伸縮的關節(jié),使其能夠在空間中執(zhí)行精確的定位和操作。機械臂通常由電機、傳感器、控制系統(tǒng)和執(zhí)行器組成。 工業(yè)機器人是一種
2024-08-16 09:43:021702 2024世界人工智能大會上,香橙派攜OrangePiAIpro20T在世博展覽館H1-A301展區(qū)亮相,給大家?guī)鞟I+互動的沉浸式體驗。其中,搭載OrangePiAIpro開發(fā)板的智能機械臂吸引了
2024-08-19 16:42:551687 
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論