 OrangePi AIpro應用:機械臂應用開發指南
OrangePi AIpro應用:機械臂應用開發指南

2024世界人工智能大會上,香橙派攜OrangePi AIpro 20T在世博展覽館H1-A301展區亮相,給大家帶來AI+互動的沉浸式體驗。其中,搭載OrangePi AIpro開發板的智能機械臂吸引了眾多與會者的駐足關注,他們對這款智能機械臂表現出極大的熱情。此款機械臂能對積木顏色進行識別,將積木搬運到對應區域,可應用于垃圾分揀及工業、物流、醫療領域。那么今天,我們就給大家介紹如何通過OrangePi AIpro打造一款智能的機械臂。
1、需要準備的東西
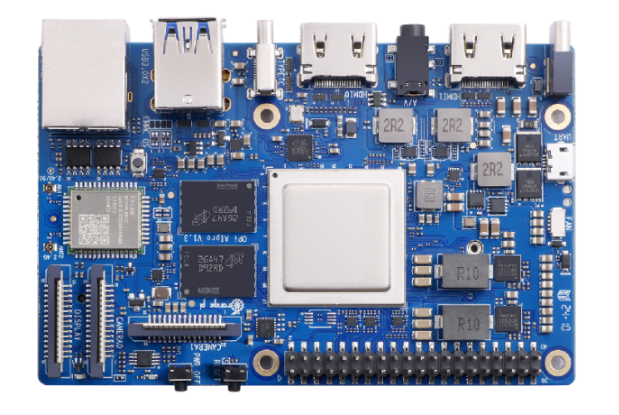
1)Orange Pi Ai Pro開發板。
2)Orange Pi Ai Pro開發板配套的65W PD電源。

3)Orange Pi Ai Pro開發板配套的散熱風扇。

4)32GB或32GB以上容量的TF卡。

5)用于燒錄Ubuntu鏡像到TF卡中的讀卡器。

6)HDMI顯示器和HDMI線。



8)一臺Windows系統的筆記本或者電腦,燒錄開發板的Ubuntu系統到TF卡中需要用到。
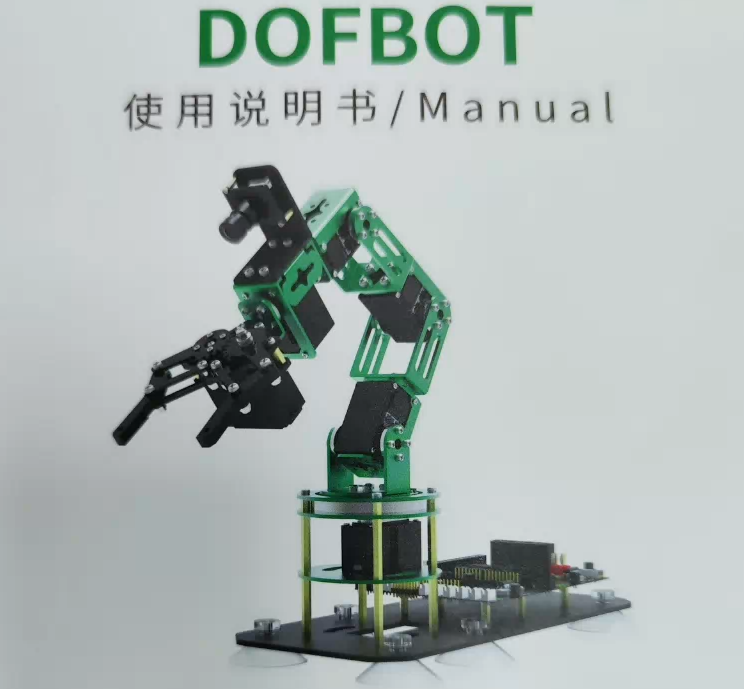
9)標準版本的亞博智能機械臂套件。

2、機械臂組裝時的注意事項
1)亞博智能機械臂套件里面有一個使用說明書,機械臂的吸盤、擴展板、攝像頭的安裝參考這個說明書即可。
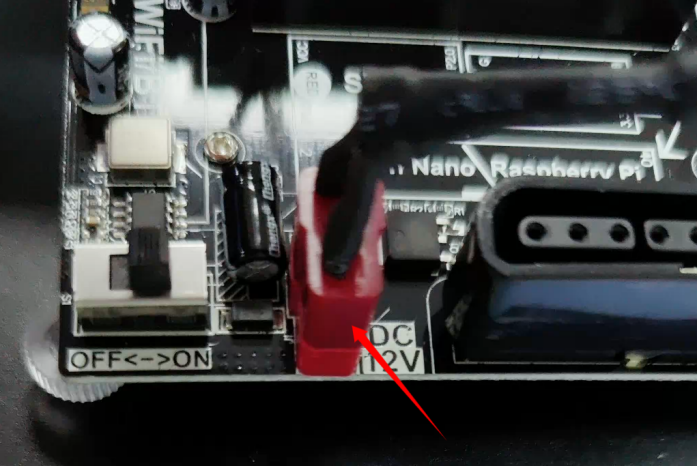
2)機械臂底板的電源線如下所示,此線的安裝需要用較大的力氣按壓進去。
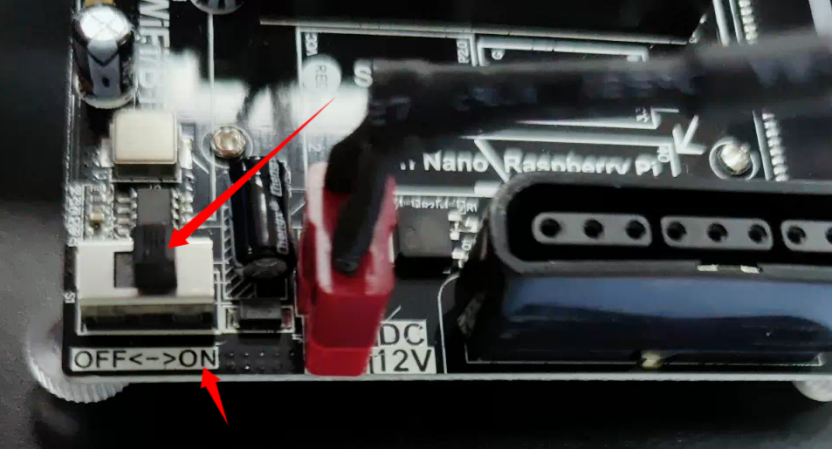
3)機械臂使用時記得把電源按鍵撥到ON檔位。
4)將開發板固定到機械臂的底板上前,請先不要安裝風扇,不然無法固定。
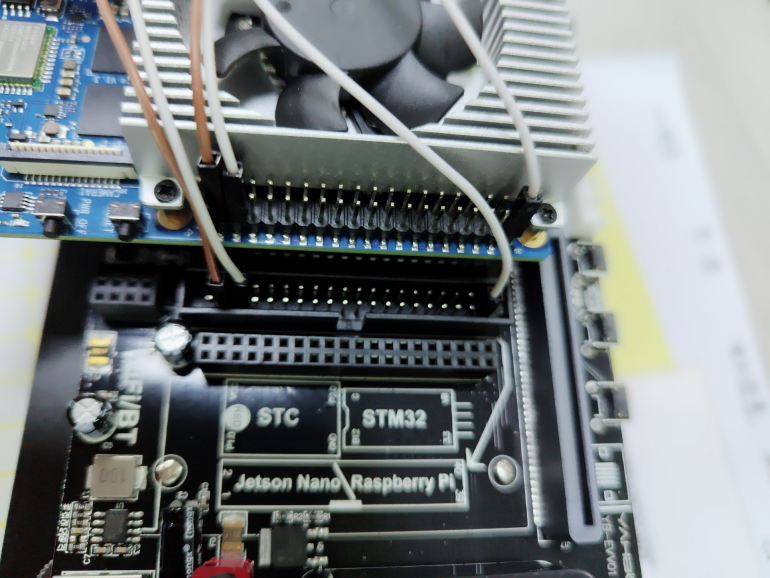
5)機械臂的套件中默認提供了下圖所示的排線來連接開發板和機械臂底板的40pin接口(實際只使用了3個引腳)。由于開發板風扇的影響,此40pin排線無法插入開發板的40pin接口中。我們需要額外準備3根杜邦線來連接開發板和底板的引腳。

6)根杜邦線的連接開發板和機械臂底板的方法如下所示:
6.1開發板40pin的3號引腳接到底板40pin的3號引腳;
6.2開發板40pin的5號引腳接到底板40pin的5號引腳;
6.3開發板40pin的39號引腳接到底板40pin的39號引腳。
7)開發板固定在機械臂的底板上時,可以靠后一些,這樣方便開發板接入HDMI顯示器。
3、燒錄系統并運行機械臂程序的方法
1)首先燒錄已預裝機械臂樣例代碼的Ubuntu鏡像到TF卡中。燒錄鏡像的方法請參考《OrangePi_AI_Pro_昇騰_用戶手冊》中2.4.燒寫Linux鏡像到TF卡中的方法一小節的說明。已預裝機械臂樣例代碼的Ubuntu鏡像下載地址如下所示:
鏈接: https://pan.baidu.com/s/1CzjZUAxNtWlmW1OY-WRyNA?pwd=cejh
提取碼: cejh
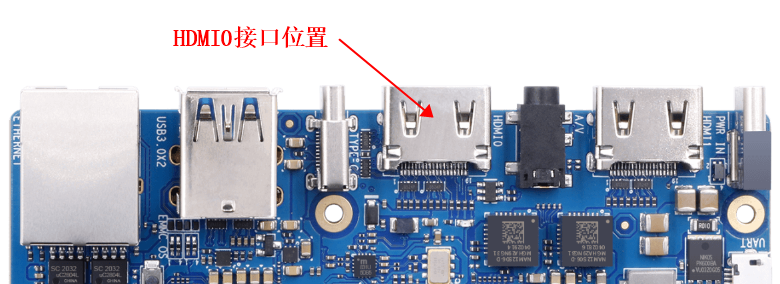
2)然后將開發板連接到HDMI顯示器,并接上鼠標和鍵盤,這樣我們就可以在HDMI顯示器中來操作開發板的Ubuntu系統了。需要注意的是,目前只有HDMI0接口支持顯示Ubuntu系統的桌面。
3)然后通過網線或者WIFI將開發板連接到能正常上網的網絡中。網絡的連接方法請參考《OrangePi_AI_Pro_昇騰_用戶手冊》中3.5.網絡連接測試一小節的說明。
開發板Ubuntu系統登密碼為Mind@123。
4)登錄Ubuntu系統的桌面后,首先打開一個終端,然后使用sudo -i命令切換到root用戶。
5)然后運行下面的命令,啟動機械臂的分揀功能。
cd /root
./start_block_cls.sh
4、校準攝像頭的方法
1)如果測試發現機械臂抓取積木不準,可以校準下攝像頭。
2)首先通過HDMI顯示登錄Ubuntu系統的桌面。
3)然后打開一個終端,并使用sudo -i命令切換到root用戶。
4)然后進入機械臂代碼的目錄。
cd /root/xunlong_arm
5)然后運行下面的命令打開校準程序。
jupyter notebook --allow-root --no-browser --ip 127.0.0.1
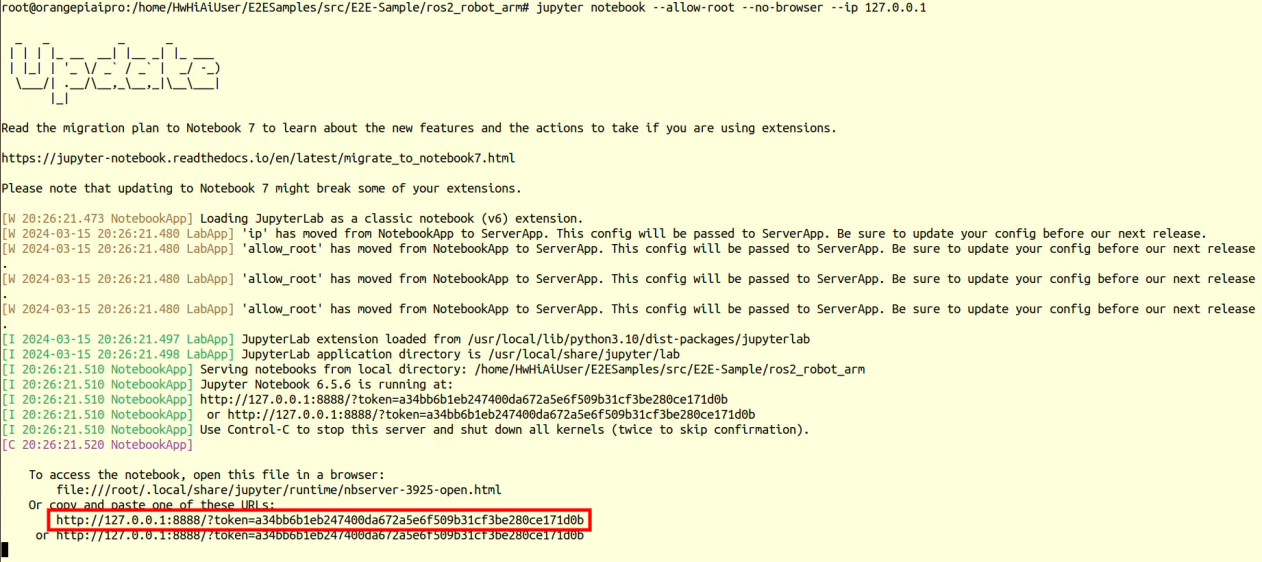
6)然后在開發板的Ubuntu系統中打開瀏覽器,輸入上面紅色框中的地址會顯示下面的界面。
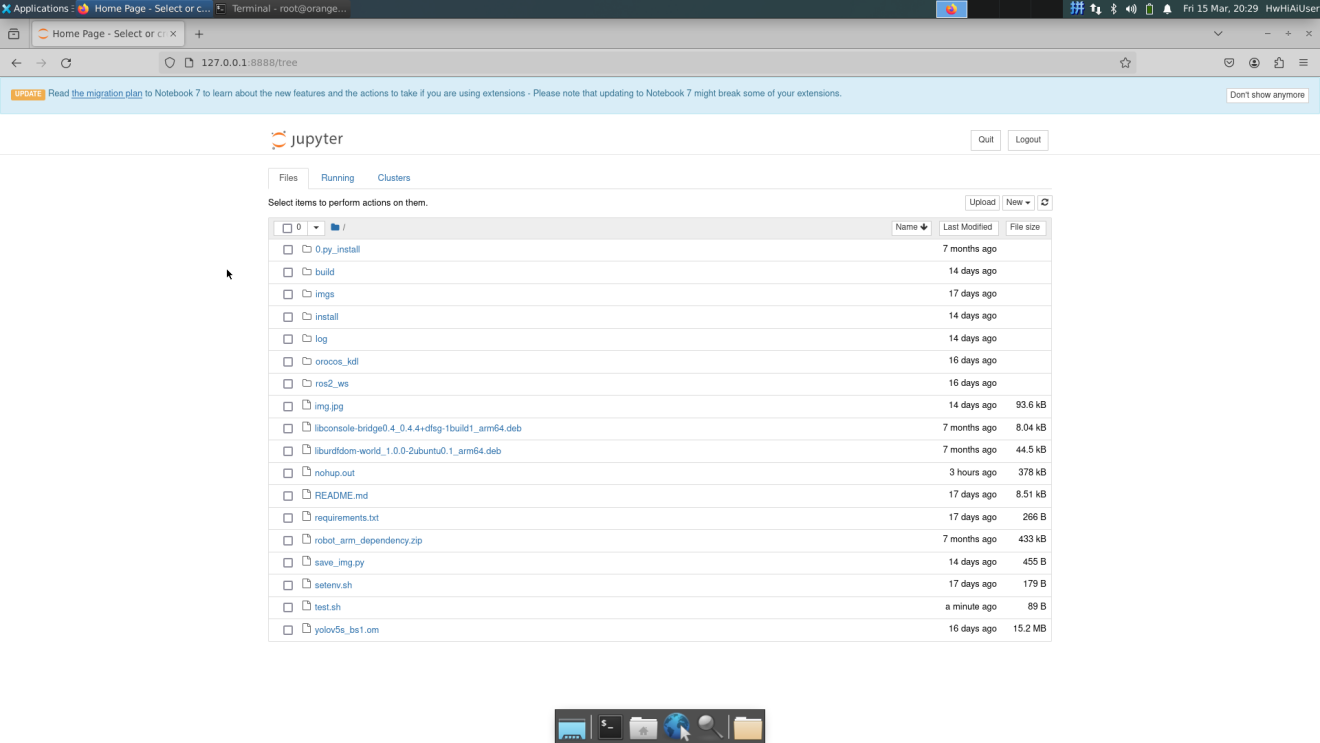
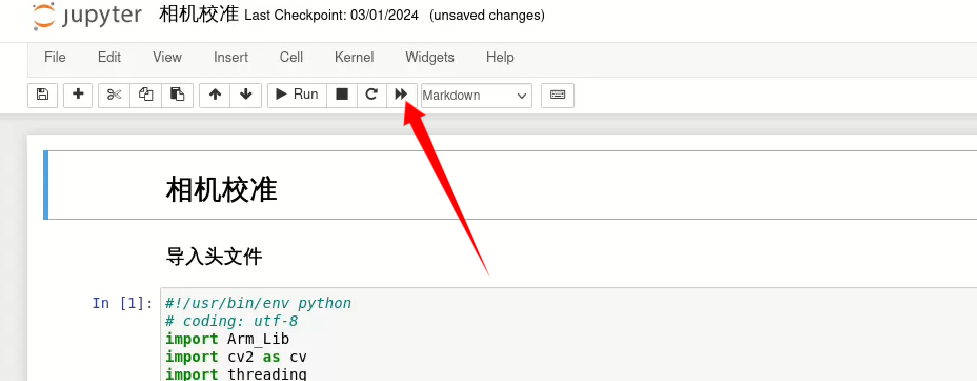
7)然后打開相機校準.ipynb

8)然后點擊下面的圖標開始運行
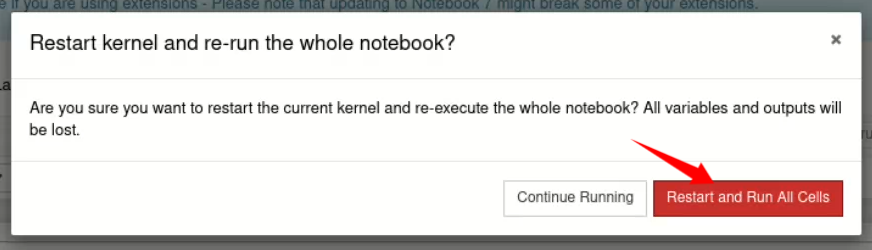
9)然后選擇Restart and Run All Cells
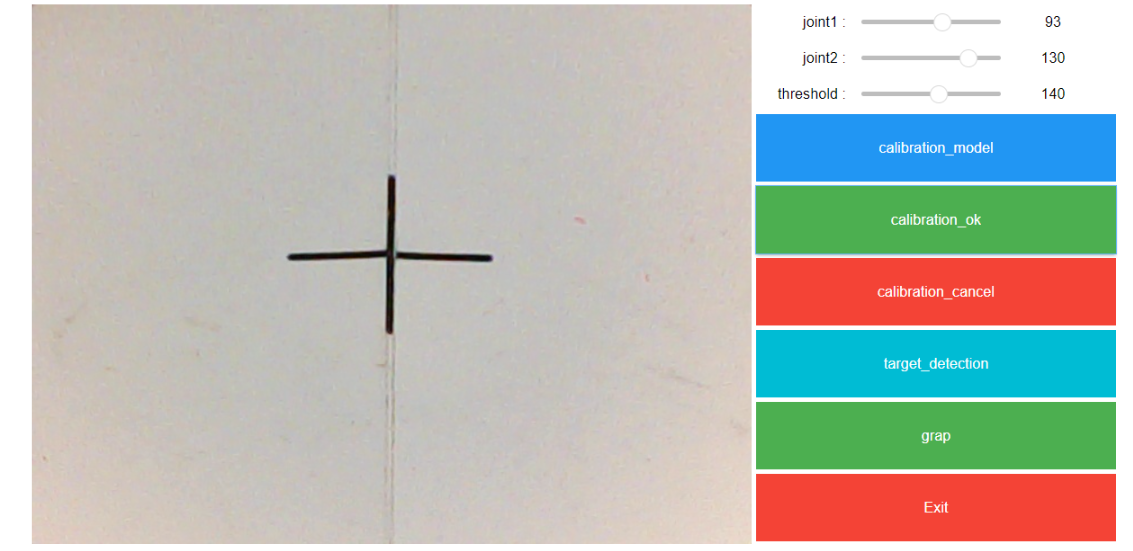
10)成功運行后的顯示如下所示,會顯示機械臂攝像頭的圖像。
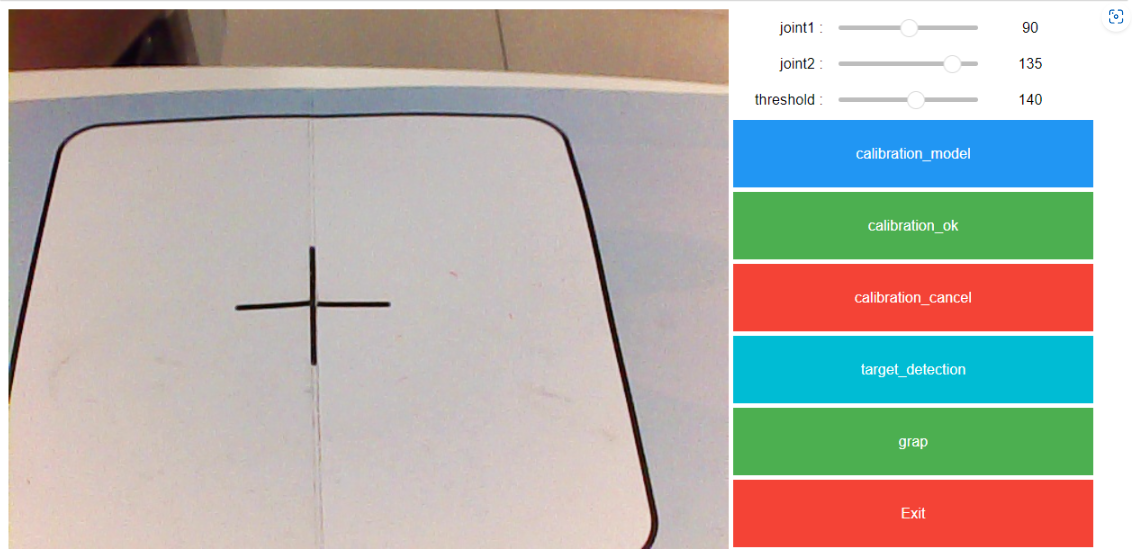
11)然后單擊calibration_model按鈕,并調節joint1與joint2。請保證調試環境的光源充足,確保藍色邊框覆蓋整個十字框,畫面如下所示。
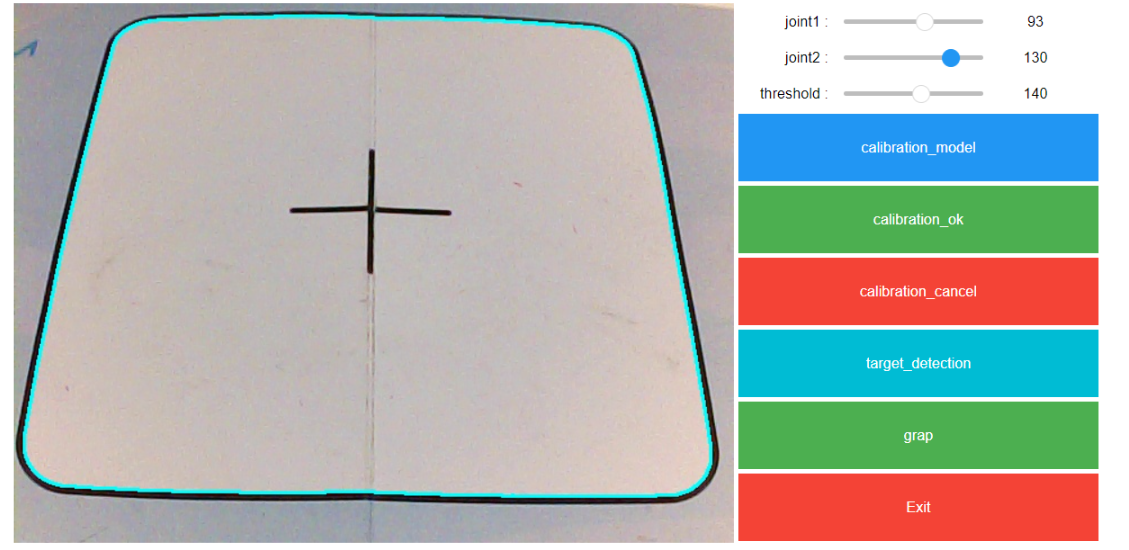
12)單擊calibration_ok按鈕,可視化界面進入方框內部,畫面如下所示。
13)校準完后,返回終端,按下鍵盤Ctrl+C鍵,即可停止jupyter notebook程序。
14)然后再測試下機械臂抓取積木是否準確。
15)如果在完成相機校準后抓取積木仍有誤差,此時就需要在程序中手工校準了。
a.首先打開配置文件offset.txt。
cd /root/xunlong_arm/
vim config/offset.txt
b.打開offset.txt后會看到兩個參數。
0.016
0.01
c.如發現機械臂抓取略微靠積木的后方,則需要適當加大第一個參數。
d.如發現機械臂抓取略微靠積木的前方,則需要適當減小第一個參數。
e.如發現機械臂抓取略微靠積木的右方,則需要適當加大第二個參數。
f.如發現機械臂抓取略微靠積木的左方,則需要適當減小第二個參數。
g.修改參數后,需要重新運行程序來測試。
-
人工智能
+關注
關注
1817文章
50097瀏覽量
265316 -
開發板
+關注
關注
26文章
6291瀏覽量
118074 -
機械臂
+關注
關注
14文章
596瀏覽量
26120 -
orange pi
+關注
關注
0文章
45瀏覽量
3136
發布評論請先 登錄
TDK SmartMotion Platform Ver. G 硬件開發指南
電子工程師硬件設計開發指南
避坑指南!RK3568開發板選型,這5點沒看清千萬別下手!(附迅為驅動開發指南資源)
【北京迅為】itop-3568開發板驅動開發指南(重制版)
傳統測試設備的局限與協作機械臂的破局

中微愛芯AiP9P35X系列芯片開發指南

中微愛芯AiP8F35XX系列觸摸芯片開發指南
中微愛芯AiP8F32XX系列芯片開發指南
協作機械臂產品介紹
從驅動到應用:RT-Thread環境下的SDIO開發指南
GZCOM-NET:為機械臂測試帶來高效無線解決方案!




 工商網監
工商網監
評論