KUKA庫卡C4機器人驅(qū)動器故障報警維修庫卡機器人維修內(nèi)容包括庫卡機器人示教器維修,KUKA伺服驅(qū)動模塊維修,庫卡機器人伺服電機維修,KUKA機械手PC工業(yè)電腦維修,庫卡機器人電路板維修,庫卡機器人
2021-09-17 07:09:52
1 開機坐標系無效 世界坐標系是以槍頭為基點,在這種坐標系中機器人所有的動作都是按照以槍頭為頂點來完成移動,XYZ方向切割槍方向不改變,如果機器人在世界坐標系中移動,槍頭也隨著改變方向,那就是我們在
2019-07-15 07:48:36
B531)KUKA庫卡 00-105-414 KSD1-64 伺服驅(qū)動器 (E93DA143I4B531)KUKA庫卡 00-107-300 機器人伺服驅(qū)動控制器 (E93DE143E4B531)KUKA庫卡
2020-09-08 16:30:28
KUKA焊接機器人伺服電機常見故障及維修處理1、庫卡機器人伺服電機的基本檢查由于庫卡機器人伺服電機內(nèi)含有精密檢測器,因此,當發(fā)生碰撞、沖擊時可能會引起故障,在對庫卡機器人伺服電機維修時應作如下檢查
2020-09-26 16:51:21
這個是KUKA重型機器人處理和測量混凝土軌枕的視頻。處理得相當精細。真心值得愛好機器者和愛國者研究研究。
2015-02-03 15:18:31
有沒有機器人比較全的資料
2017-03-21 12:35:21
請各位大神指導,移動式機器人是怎么做EMC保護的,機器人是鋰電池供電,所以就不能接大地了,那么對機器人的干擾是通過何種方式來釋放或轉(zhuǎn)移的?
2016-07-26 13:33:14
angSpeed)我們將其稱為v-(v-omega)驅(qū)動界面,因為我們可以為機器人指定速度v和角速度。 如果給定v且= 0,則機器人應該一直行駛。 在v = 0和設置為固定值的情況下,機器人應該在原地旋轉(zhuǎn),如果v和both都獲得非零值,則機器人將驅(qū)動某種曲線。 讓我們嘗試一下!最簡單的開始是使
2021-12-20 07:53:53
大量人工進行組裝。 3C(計算機、通信和消費類電子產(chǎn)品)制造對靈活性、精準度和位置控制都有很高要求,機械臂還沒法替代人的雙手進行操作,這是計劃失敗最主要的原因。日前,在成都舉行的首屆世界機器人
2015-01-08 14:04:56
機器人的運動原理還是屬于最基本的簡單機械。機器人運動主要是依靠什么裝置?有些什么裝置是機器人用的比較多的?
2015-02-03 11:22:01
現(xiàn)在想做機器人圖像識別方面的研究,有問題請教大家,比如說:現(xiàn)在有十種瓶子,機器人能識別我指定的瓶子,并把它從A位置移動到B位置,關(guān)鍵是如何識別呢,不是很清楚,求大神指點!在此感激不盡!
2019-11-04 09:02:57
想弄一個vi可以動態(tài)顯示機器人的姿態(tài),但不知道有什么函數(shù)可以引入機器人的模型,幫幫忙,謝謝。
2012-02-11 17:25:22
移動機器人有沒有推薦的MCU,萌新求大佬幫助
2020-11-03 11:41:09
各位論壇前輩你們好,我是一名在校的即將升入大二學生,專業(yè)課暫時只學了c,電路分析基礎和工程制圖。我跟另外4個同學正在參加學校的機器人比賽,在機器人創(chuàng)意表演方面,就突發(fā)奇想,是否能做一個可以彈簡單
2017-05-22 17:09:06
各位論壇前輩你們好,我是一名在校的即將升入大二學生,專業(yè)課暫時只學了c,電路分析基礎和工程制圖。我跟另外4個同學正在參加學校的機器人比賽,在機器人創(chuàng)意表演方面,就突發(fā)奇想,是否能做一個可以彈簡單
2017-05-22 17:06:22
機器人有哪些類型?
2021-06-18 06:41:57
機器人的優(yōu)缺點有哪些?機器人是由哪些部分組成的?
2021-10-11 07:51:29
機器人的定義是什么?機器人優(yōu)點和缺點是什么?機器人是由哪些部分組成的?工業(yè)機器人的應用有哪些?
2021-07-05 06:48:21
第二章 機器人系統(tǒng)與控制需求簡介2.1 工業(yè)機器人的系統(tǒng)組成機械本體:精密減速機、伺服電機、伺服驅(qū)動器、控制系統(tǒng)(核心零部件)控制柜示教盒2.2 機器人本體結(jié)構(gòu)與傳動方式簡介四大家族:ABB
2021-09-08 07:44:15
機器人的移動通常是從管理機器人總體任務進度的中央處理器發(fā)出位置變化請求時開始的。導航系統(tǒng)通過制定行程計劃或軌跡以開始執(zhí)行位置變化請求。行程計劃需考慮可用路徑、已知障礙位置、機器人能力及任何相關(guān)的任務目標。
2019-09-10 10:44:32
`零基礎玩轉(zhuǎn)工業(yè)機器人目前,工業(yè)機器人相關(guān)的書籍數(shù)不勝數(shù),但在學習過程中,如何挑選適合自己的書籍,至關(guān)重要。綜合網(wǎng)友推薦及個人經(jīng)驗,給大家推薦幾本實用性強的參考書。1、工業(yè)機器人原理及應用本書主要
2018-10-29 17:03:22
描述機器人k-bot v.4-pcb01電源K-Bot版本4機器人的設計理念是,任何人都可以使用教育機器人進行組裝、編程和教學活動。主要是為了讓任何教育水平的老師都能在課堂上和學生一起使用它
2022-08-22 07:43:25
` 山東昊威機器人有限公司的書法機器人在展會上可謂是吸睛神器,小伙伴們紛紛前來圍觀,這不,國際友人都不禁為我們昊威書法機器人手動點贊啦!!!厲害啦我的機器人。`
2017-08-11 11:48:54
什么是機器人控制系統(tǒng)?機器人的運動控制系統(tǒng)包含哪些方面?機器人控制系統(tǒng)的基本功能有哪些?
2021-10-11 09:38:12
ROVER C5 V0501 機器人控制系統(tǒng)采用國際流行的開放式軟硬件平臺,配以自主研發(fā)的避障控制卡、牽引運動卡及機器人內(nèi)控專用編碼器和安全接口;
2019-09-12 09:00:12
stc89c52rc51單片機還沒到手。。。(只知道先從這方面先做)arduino---不過聽網(wǎng)上說最近也很火的arduino 可以做機器人但我又有疑惑arduino 是可以學到東西還是別人都做好了 自己拿來玩玩
2016-01-19 13:44:49
工業(yè)機器人的四大特征是哪些?工業(yè)機器人是由哪些部分組成的?工業(yè)機器人是怎樣進行劃分的?
2021-10-11 09:10:17
`華南機器人應用培訓中心擁有各種設備,開展各種不同的機器人培訓班。打造各種工業(yè)現(xiàn)場常見的機器人工作站,現(xiàn)開展KUKA、發(fā)那科、三菱、ABB、愛普生工業(yè)機器人培訓對外招生。 一、認識機器人技術(shù):工業(yè)
2015-09-02 14:03:18
基于計算機視覺的車身焊接機器人路徑校正裝置的制造方法【技術(shù)領域】[0001]本實用新型涉及一種基于計算機視覺車身焊接機器人路徑校正裝置,更具體地說,本實用新型涉及一種應用于汽車車身外覆蓋件焊接路徑
2021-09-02 08:36:52
很高,安全,性能超越,這個技術(shù)是為航天航空研發(fā)的,執(zhí)行的標準是美軍標,MIL-C-22520系列標準,所有的四芯軸工具都是在此標準技術(shù)上發(fā)展來的。在這種壓接形式下,我們就根本不用擔心機器人連接
2017-04-25 16:34:23
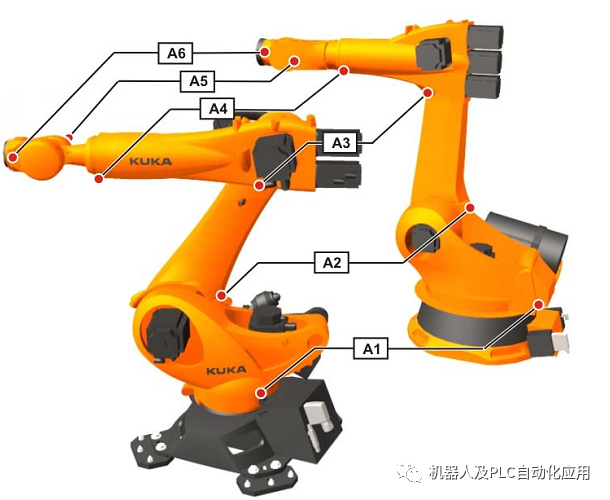
的布局如下: 傳統(tǒng)機器人KR對于KR系列這一類的傳統(tǒng)機器人來講,末端的布局一般按照滿足“三軸軸線交于一點”的基本原則來做,主要區(qū)別在于三個電機的布置和傳動方式。KUKA之前的很多機器人都采用4、5、6三
2018-11-01 11:08:12
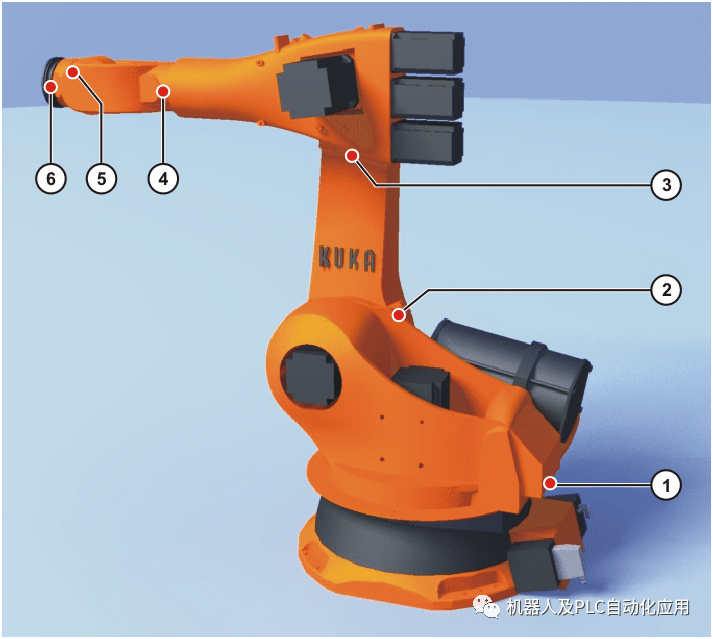
工業(yè)機器人是近兩年機械行業(yè)最熱的字眼,隨著企業(yè)工業(yè)機器人的增多,很多機械工程師對于工業(yè)機器人充滿了好奇。作為機器人四大家族之一的KUKA,已經(jīng)被美的收購,小編這就帶你走近KUKA工業(yè)機器人的內(nèi)部結(jié)構(gòu)
2021-07-05 06:44:21
庫卡KUKA機器人四種啟動方式1)自動運行說明 庫卡機器人處于自動運行時,先要在手動狀態(tài)時候選擇需要運行的程序,然后通過鑰匙開關(guān)切換機器人到自動運行狀態(tài),給機器人上電,然后啟動機器人運行程序,讓
2020-09-04 15:45:41
PH1013-2840庫卡機器人KUKA主機維修KUKA驅(qū)動器模塊維修C4庫卡機器人驅(qū)動電源維修KPP600 3X64 KUKA機器人配件維修北京KUKA庫卡機器人模塊維修 KRC4 KPC4機械行業(yè)維修:西門子系統(tǒng)、法那克系統(tǒng)、沙迪克、FIDIA、天田、AMADA、友嘉、大宇系統(tǒng);加工中心、..
2021-09-08 07:30:00
關(guān)于ros智能機器人,就是一個寫智能機器人代碼的一個虛擬機,
2021-10-13 19:20:16
。其中,掃地機器人針對的目標用戶是所有家庭,產(chǎn)品的需求痛點是為了解放繁忙的人類,解放雙手,用更智能化的機器代替人。近年來,國家相關(guān)部門不斷加大對機器人產(chǎn)業(yè)的扶持力度。《國家中長期科學和技術(shù)發(fā)展規(guī)劃綱要
2017-05-27 13:31:20
尋求KUKA機器人控制柜三維模型,做方案有時需要用到,大家誰有可以給我發(fā)一份嗎?先謝謝了
2016-04-18 16:05:43
我看NI有Robotics Toolkit for KUKA KR C2的附加包,這個怎么用啊?如何和kuka機器人建立通訊啊?是Tcp接口嗎?
2023-10-21 20:59:28
KUKA機器人的資料在網(wǎng)上還是挺難找的,早期剛進公司,想自己找點資料學習,發(fā)現(xiàn)網(wǎng)上資料好少,而且內(nèi)容很簡單,直到最近,領導決心培養(yǎng)我負責KUKA的一條流水線,所以才把這些近乎“絕密資料”發(fā)給我學習。所以我自身也是初學者,希望把資料分享出來,大家能互相學習,互相交流進步
2016-03-08 23:45:26
在禁止布線層如何確定零點或者是絕對零點(如果基板尺寸較大時):L
2011-02-28 09:29:45
我是新人,求幫助啊,明天需要提交輪式機器人應用的報告,求大神給點建議,可用輪式機器人應用于那些方面,要求實際可行,應用于生活,農(nóng)業(yè),軍事都可以,謝謝啦
2013-04-17 16:32:16
公司的酷卡機器人有一個調(diào)零的程序,就是把機器人移動靠近到防護圍欄上的一個傳感器,直到觸發(fā)傳感器動作。在機器人發(fā)生碰撞后就提示要求調(diào)零,但一直沒搞明白這樣做目的是什么,希望知道的朋友指點一下。
2015-01-14 14:35:30
在的痛點,難點與關(guān)鍵點;認為開始全面推進機器人在養(yǎng)老市場的條件已經(jīng)成熟。在按照國家養(yǎng)老政策框架下,率先開啟機器人養(yǎng)老市場深度系統(tǒng)開發(fā)不僅利國利民,而且也是贏得機器
2022-04-04 08:13:07
江智黨建機器人是經(jīng)過多年的市場沉淀 ;現(xiàn)已可以提供系統(tǒng) 全方位的黨建機器人服務
2022-06-21 07:59:59
普思立激光自主研發(fā)的點錫膏焊接雙工位機器人采用雙龍門雙工位架構(gòu),點錫膏與恒溫焊接集成一體,流水式作業(yè),效率更高。
2022-11-21 13:59:22
深圳泰科智能TB6-R10協(xié)作機器人是一款功能更強的工業(yè)級協(xié)作機器人,能夠勝任10KG的有效負載的自動化任務,工作半徑可達1333mm,適用于大范圍、大負載的作業(yè)任務,可應用于工廠自動化、汽車、3C、醫(yī)療、電力、科研、教育等多個行業(yè)、多場景的自動化需求。
2023-04-17 16:36:37
。既有強大的通用性、 協(xié)作性與開放性,適用于物流裝配、流水線生產(chǎn)、上下料、AGV、3C電子、科研、醫(yī)療等行業(yè)。TA6系列協(xié)作機器人安裝簡單(安裝方式任意角度)及用
2023-04-17 17:49:50
產(chǎn)品介紹 ABB機器人產(chǎn)品線豐富,包括?多關(guān)節(jié)機器人、?協(xié)作機器人、?噴涂機器人、?SCARA機器人以及?自主移動機器人(?AMR)等?多關(guān)節(jié)機器人?:ABB的多關(guān)節(jié)機器人是六軸關(guān)節(jié)型
2024-09-30 17:56:07
KUKA機器人KRC4操作說明書.......
2015-12-23 14:47:43 77
77 KUKA機器人TCP(工具中心點)設定.
2015-12-23 14:50:4936 機器人塌架。 3.與工件或環(huán)境發(fā)生碰撞。 4.沒在控制器控制下,手動移動機器人關(guān)節(jié)。 5.整個硬盤系統(tǒng)重新安裝。 6.其它可能造成零點丟失的情況。 二、零點標定 按下面方法可以標定零點: *千分表:手工檢測,輸入數(shù)據(jù)的方法。 *EMT:
2017-09-19 18:31:0815 UKA(庫卡)是工業(yè)機器人四大家族品牌之一,也是世界領先的工業(yè)機器人制造商,在工業(yè)機器人制造方面有40多年的歷史。 早在1973年,KUKA就研發(fā)出了旗下第一臺由電機驅(qū)動的6軸工業(yè)機器人
2017-09-29 17:11:140 本文檔的主要內(nèi)容詳細介紹的是庫卡編程資料入門課件庫卡機器人基礎教程和庫卡C4編程指南及焊接機器人教程合集免費下載包括了:KUKA基礎培訓之1-機器人系統(tǒng)的結(jié)構(gòu)和功能,KUKA基礎培訓之2-機器人運動
2019-04-22 08:00:0042 現(xiàn)場應用日漸趨向全自動智能化,對人機協(xié)作的需求更加旺盛,KUKA LBR iiwa 機器人的身影也出現(xiàn)在各種適用場合。有人可能會有疑問:它與 KR C4 機器人有什么區(qū)別?
2019-07-08 15:07:59 2456
2456 本章介紹當機器人部件(包括馬達和減速機)進行更換后,通過視覺來恢復機器人的零點位置信息的相關(guān)方法。
2019-08-28 18:32:152216 
差壓式液位計的零點遷移量的實質(zhì)是:由于變送器(以4~20mADC輸出的變送器為例)的安裝位置的變化,造成了當液位是零時,而變送器的輸出不是零(4mADC),為了使變送器的輸出是零(與液位的零位相對應),將變送器的零點進行了遷移。也就是改變送器的零點。
2019-11-29 10:35:2315970 長時間以來,我們一直稱此故障為“零點丟失”,這是一種不準確的描述。KUKA機器人零點參數(shù)不會“丟失”,它是記錄在一個EEPROM(電可擦寫只讀存儲器)中的,不會因為長時間斷電、電池電力不足等原因而“丟失”。
2019-12-05 08:00:000 KUKA 和 Tricor 公司最近共同完成了一個項目:一臺靈敏型 KUKA LBR iiwa 機器人,可用于紙箱坯料的折疊和粘接。瓦楞紙板被運送至包裝機器人的工作區(qū)域內(nèi)。
2020-05-09 11:12:484845 最近在校正C2機器人時遇到了一個小事故,機器人的EMT壞了,反復校正零點報校正超時。
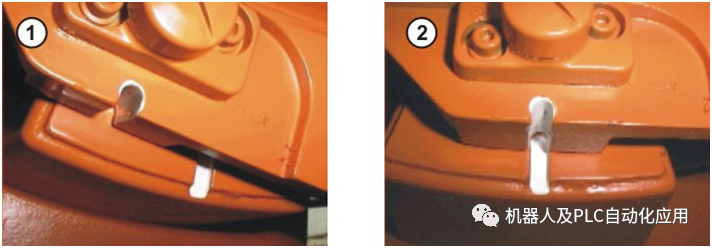
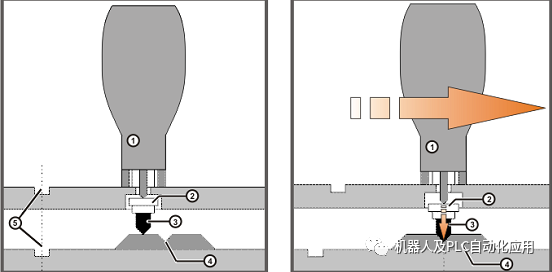
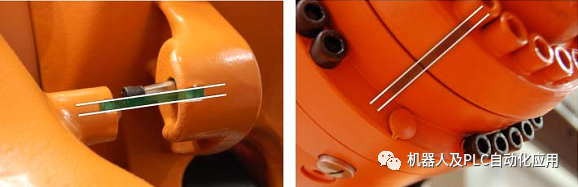
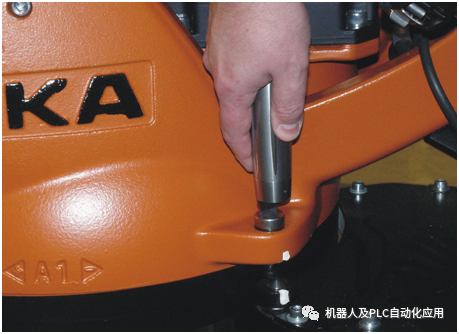
2020-06-03 16:26:274795 零點標定可通過確定軸的機械零點的方式進行。在此過程中軸將一直運動,直至達到機械零點為止。這種情況出現(xiàn)在探針到達測量槽最深點時。因此,每根軸都配有一個零點標定套筒和一個零點標定標記。
2020-06-12 15:15:154505 機器人零位校正后,可以用直角坐標系移動機器人或運行程序; 同時機器人也知道軟限位的位置.
2020-06-12 15:48:082850 零點標定可通過確定軸的機械零點的方式進行。在此過程中軸將一直運動,直至達到機械零點為止。這種情況出現(xiàn)在探針到達測量槽最深點時。因此,每根軸都配有一個零點標定套筒和一個零點標定標記。
2020-06-30 16:52:044133 
機器人在執(zhí)行焊道位置示教程序時,當機器人運行到焊道軌跡點時,通過KUKA 用戶程序記錄焊道的程序號,焊點號,焊道圖形屬性和坐標值,然后存到PFO應用軟件數(shù)據(jù)庫里。
2020-06-30 17:11:522675 通過 PROFINET 進行電源管理,這個千萬不能和機器人節(jié)能功能混為一談!
2020-09-03 14:20:014398 
Kuka推出了新系列的SCARA機器人。該公司表示,新型KR SCARA關(guān)節(jié)臂機器人是工業(yè)生產(chǎn)的可靠助手,在小零件裝配,材料處理和檢查任務等應用中表現(xiàn)出色。 Kuka稱,在6公斤以下的有效載荷類別中
2020-10-15 12:02:323235 最近出了C4機器人我又撿起了C2機器人的維修工作,由于本身對C2的接觸時間不久就開始學習了C4機器人,因此很多時候沒有C4機器人掌握的好。這幾天就一直在解決機器人需要插2個U盤才能備份的問題。 我們
2020-12-23 16:41:449864 在工業(yè)機器人的操作、編程和調(diào)試時坐標系具有重要的意義。在機器人控制系統(tǒng)中定義了下列坐標系: ROBROOT 機器人足部坐標系 固定位于機器人足部。 是機器人的原點。 是世界坐標系的參照點
2020-12-23 17:41:206666 如果正在運行的機器人遭遇突然停電,可能會造成機器人原點丟失,其他基本沒有什么影響。 什么是零點 機器人零點是機器人操作模型的初始位置,每一臺機器人在出廠時就已經(jīng)設置好了零點。當零點不正確時,機器人
2021-02-12 11:51:0011039 KUKA機器人程序中銑削清零方式: bin3 ( !F329 ) = 1 給BOSCH二進制數(shù)(1號鉗)。 bin3 ( !F329 ) = 2 給BOSCH二進制數(shù)(2號鉗)。 A786
2021-06-18 15:39:313917 庫卡機器人有限公司培訓資料之庫卡機器人編程C4教程
2021-11-05 18:04:3311 PH1013-2840庫卡機器人KUKA主機維修KUKA驅(qū)動器模塊維修C4庫卡機器人驅(qū)動電源維修KPP600 3X64 KUKA機器人配件維修北京KUKA庫卡機器人模塊維修 KRC4 KPC4機械行業(yè)維修:西門子系統(tǒng)、法那克系統(tǒng)、沙迪克、FIDIA、天田、AMADA、友嘉、大宇系統(tǒng);加工中心、..
2022-01-12 10:39:4011 KUKA C4 機器人報:KSS13012<{總線識別號}>ECat Stack初始化時出錯可能的原因1.原因:在VorkVisual項目中RDC
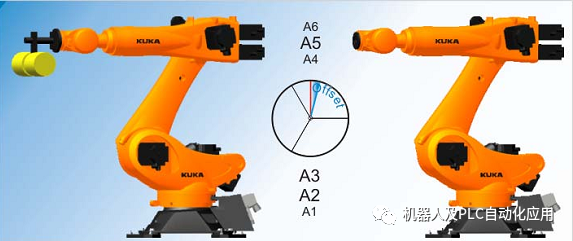
2022-03-17 09:55:199171 所有機器人的零點標定位置都是相似的,但不盡相同。精確位置在同一機器人型號的不同機器人之間也會有所不同。
2022-08-15 10:13:592679 電子發(fā)燒友網(wǎng)站提供《Core 1808 JD4工具DriverAssitant v4.8.zip》資料免費下載
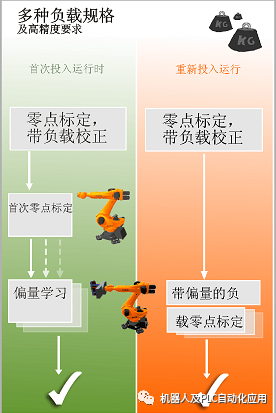
2022-09-16 09:28:1416 ?MAM 文件(零點校準標記槽偏差) 參照調(diào)整適用于對正確調(diào)整的機器人進行維護并由此導致調(diào)整值丟失時進行。? 示例: ?更換 RDC ?更換電機 我們更換了機器人,讓后在進行零點校正過程中出現(xiàn)了
2022-10-26 11:19:312892 SynchroMove軟件在 機器人D盤中的KUKA_OPT文件夾中。
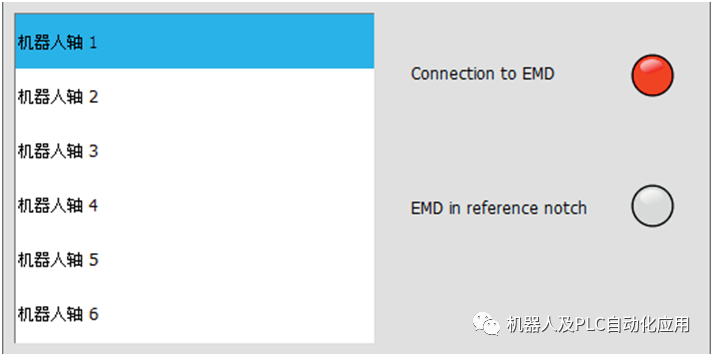
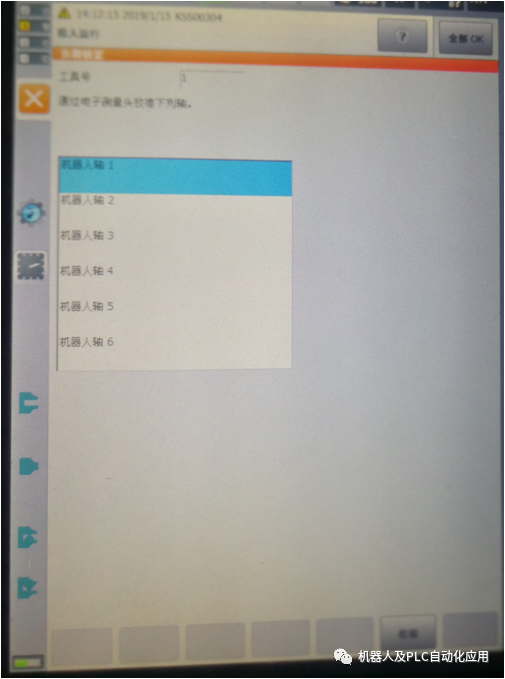
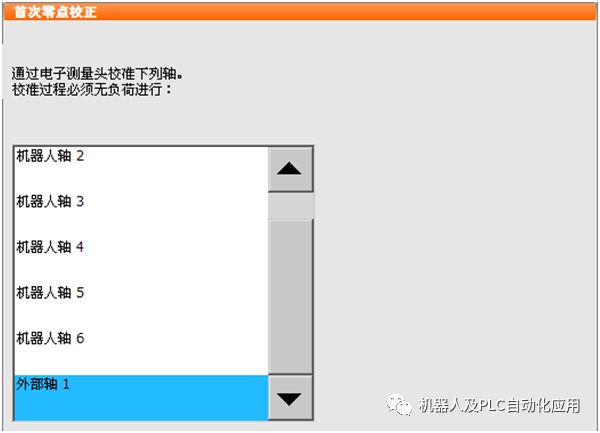
2022-11-29 09:55:112437 完整的零點標定過程包括為每一個軸標定零點。KUKAC4機器人通過技術(shù)輔助工具 EMD,可為任何一根在 機械零點位置的軸指定一個基準值 (例如:0°)。
2022-12-12 11:11:1612008 未進行零點復歸測試,參考點開關(guān)被觸發(fā)至少 5 分鐘。參考點開關(guān)安裝在錯誤的位置上或被移動。
2022-12-26 11:33:252238 上級控制器通過自動外部接口將用于機器人過程的信號(例如運動使能,故障確認,程序啟動等)傳輸?shù)?b class="flag-6" style="color: red">機器人控制器。
2023-01-08 14:49:513014 如果機器人程序要由上級控制器(例如PLC)集中控制,則可以使用”自動外部”界面來執(zhí)行。
2023-01-08 16:03:183194 機器人的零點標定是需要將機器人的機械信息和位置信息同步,來定義機器人的物理位置,從而使機器人能夠準確地按照原定位置移動。
2023-02-16 10:46:015407 KUKA機器人固定焊鉗的銑削控制
2023-04-13 11:36:031453 用KR6機器人測試這個舉例程序會產(chǎn)生與前面例子相同的結(jié)果。機器人運動到機械零點。對于這種模式的機器人兩種指令是一樣的。
2023-04-18 11:24:244710 一般都會定義機器人第一軸的旋轉(zhuǎn)軸為基坐標系Z軸,旋轉(zhuǎn)中心即是坐標系原點,X和Y的方向是的電機零點確定,所以只要你不更換電機的零點和機械結(jié)構(gòu),單個機器人里這個基坐標系是永遠不會變的!
2023-05-11 15:57:442629 
一款工業(yè)儀表的準確度是否能滿足要求,除了產(chǎn)品自身的質(zhì)量水平外,還與使用方法以及校正工作有關(guān),校正不只是要對儀表的各項參數(shù)進行調(diào)整校準,還要對儀表的零點進行調(diào)整,就像我們稱體重,如果指針的起點不在零點
2023-05-12 13:34:0511043 
KUKA機器人的PC是就是一個普通的PC,因此調(diào)整時間和更改普通PC的實踐一樣.
2023-05-29 11:10:1610205 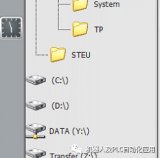
線性和重復性是電磁流量計的兩個重要指標。在對電磁流量計進行檢定和現(xiàn)場使用中發(fā)現(xiàn),零點對上述兩個指標有較大的影響。故此,對電磁流量計零點的校驗在檢定中顯得尤為重要,包含流量零點和電流零點。 1、流量
2023-07-24 13:32:362027 當機器人校正的時候,各個軸就可以運動到一個特定的機械位置,也就時所謂的機械零點。一旦機器人運動到機械零點,各個軸上的絕對編碼盤的值就被保存下來了。
2023-09-04 16:57:101720 
什么是零點漂移?如何抑制零點漂移?零點漂移怎么解決?? 零點漂移是指在沒有外力作用的情況下,傳感器輸出值的基準值(稱為零點)發(fā)生漂移。例如,在溫度傳感器中,當溫度變化很小或較為穩(wěn)定時,如果傳感器輸出
2023-09-19 17:33:5723682 零點標定可通過確定軸的機械零點的方式進行。在此過程中軸將一直運動,直至達到機械零點為止。這種情況出現(xiàn)在探針到達測量槽最深點時。因此,每根軸都配有一個零點標定套筒和一個零點標定標記。
2023-09-23 09:20:161523 
測量結(jié)果可能偏差較大,需要進行零點補正。 零點補正方法有多種,如手動調(diào)節(jié)、軟件校正、自動校正等。手動調(diào)節(jié)通常適用于簡單儀器或傳感器,如溫度計、壓力表等,需要先了解其工作原理和特點,再通過試驗和調(diào)整,調(diào)整其指針或
2023-10-26 18:19:106242 在機器人零點校正時,軸被移到一個定義的機械位置,即所謂機械零位。如果機器人在這機械零位, 那么每個軸的絕對傳感器值被存儲。零點標定目的是使機器人各軸的軸角度與連接在各軸電機上的絕對值編碼器的脈沖計數(shù)值對應起來的操作。具體而言,是為了求取零度姿勢的脈沖計數(shù)值的操作。
2023-11-19 16:19:415042 
電子發(fā)燒友網(wǎng)站提供《KUKA機器人編程說明(英文).pdf》資料免費下載
2025-03-07 14:05:010 電子發(fā)燒友網(wǎng)站提供《KUKA機器人使用說明書.pdf》資料免費下載
2025-04-17 14:07:111
 電子發(fā)燒友App
電子發(fā)燒友App















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論