") 聊聊C2機(jī)器人的校零
聊聊C2機(jī)器人的校零

最近在校正C2機(jī)器人時(shí)遇到了一個(gè)小事故,機(jī)器人的EMT壞了,反復(fù)校正零點(diǎn)報(bào)校正超時(shí).
今天我們就聊聊C2機(jī)器人的校零.
為什么要校零?
1.當(dāng)機(jī)器人校正的時(shí)候,各個(gè)軸就可以運(yùn)動(dòng)到一個(gè)特定的機(jī)械位置,也就時(shí)所謂的機(jī)械零點(diǎn)。
2.一旦機(jī)器人運(yùn)動(dòng)到機(jī)械零點(diǎn),各個(gè)軸上的絕對(duì)編碼盤的值就被保存下來(lái)了。
機(jī)器人零位校正后,可以用直角坐標(biāo)系移動(dòng)機(jī)器人或運(yùn)行程序;同時(shí)機(jī)器人也知道軟限位的位置.
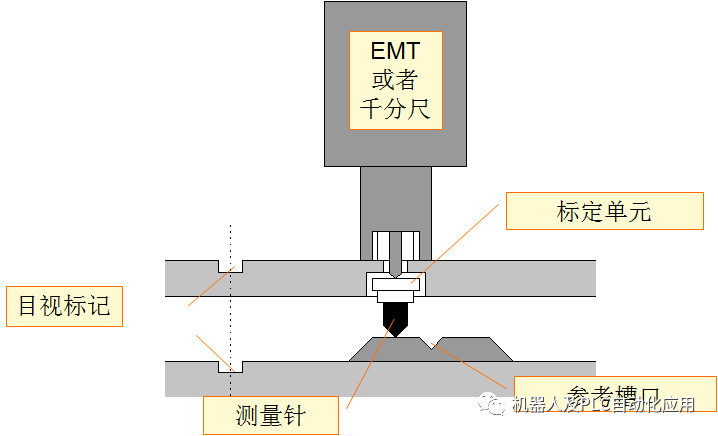
校零裝置:
1.EMT
2.千分表
控制運(yùn)行過(guò)程示意:
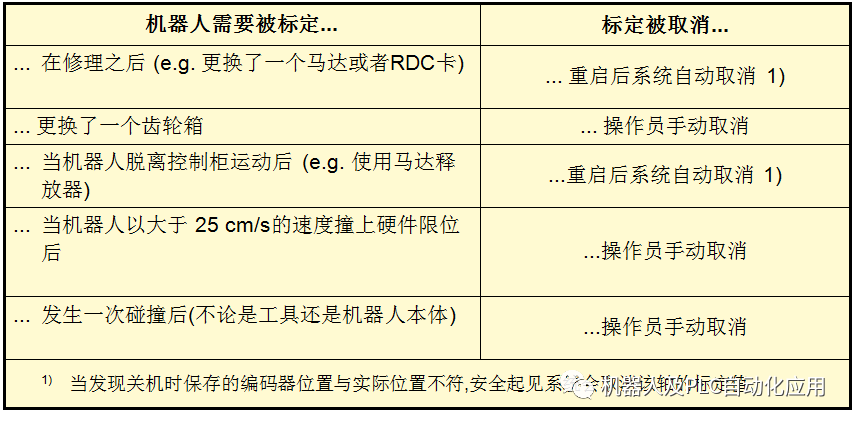
重新標(biāo)定的情況:

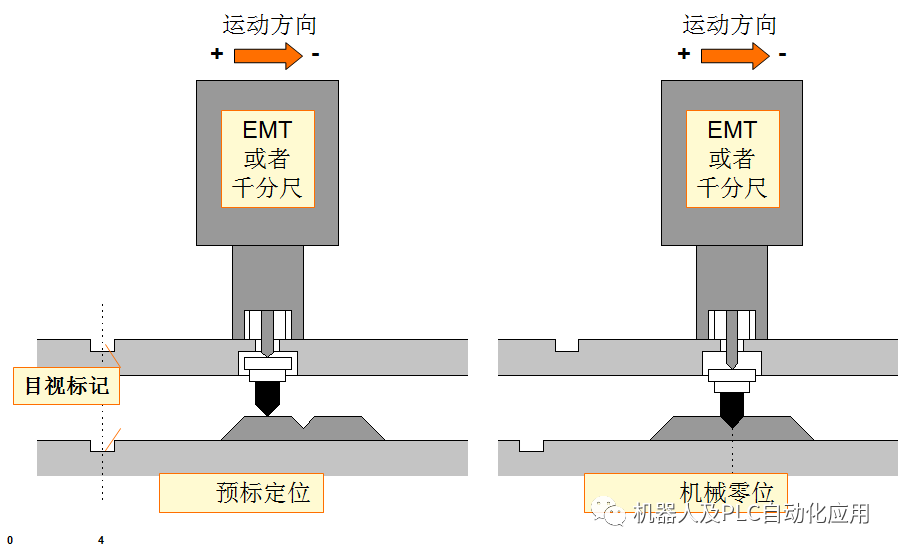
使用EMT標(biāo)定:
?把需要標(biāo)定的軸移動(dòng)到預(yù)標(biāo)定位 (如圖所示白線位置)
?使用軸坐標(biāo)系移動(dòng)機(jī)器人各軸
?每個(gè)軸的標(biāo)定是獨(dú)立的

?從1軸開始往上標(biāo)定
?每個(gè)軸總是從正向往負(fù)向運(yùn)動(dòng)
?僅僅在T1模式下!

?摘掉標(biāo)定單元的保護(hù)蓋
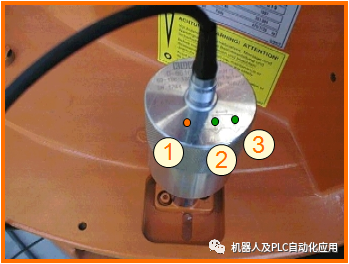
?接上EMT 并連上信號(hào)線(另一端連接到機(jī)器人底座上的連接盒接口 X32上)

?EMT上有三個(gè)指示燈:
1. 紅色 - 錯(cuò)誤
2.綠色 - 下降沿
3. 綠色 - 上升沿
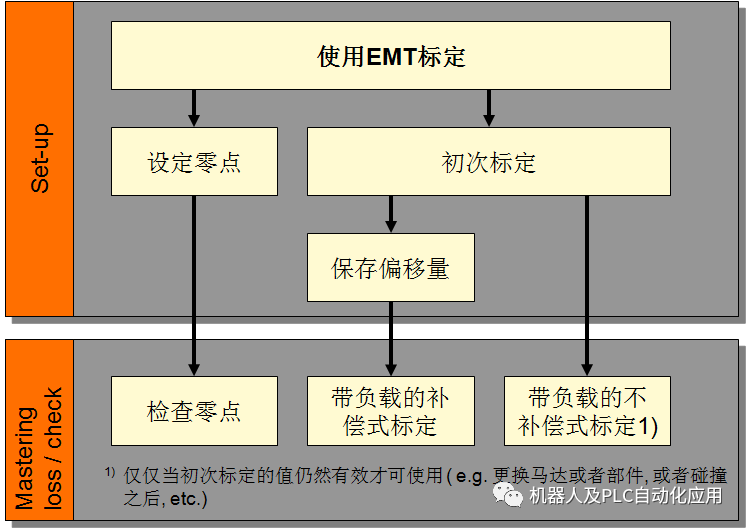
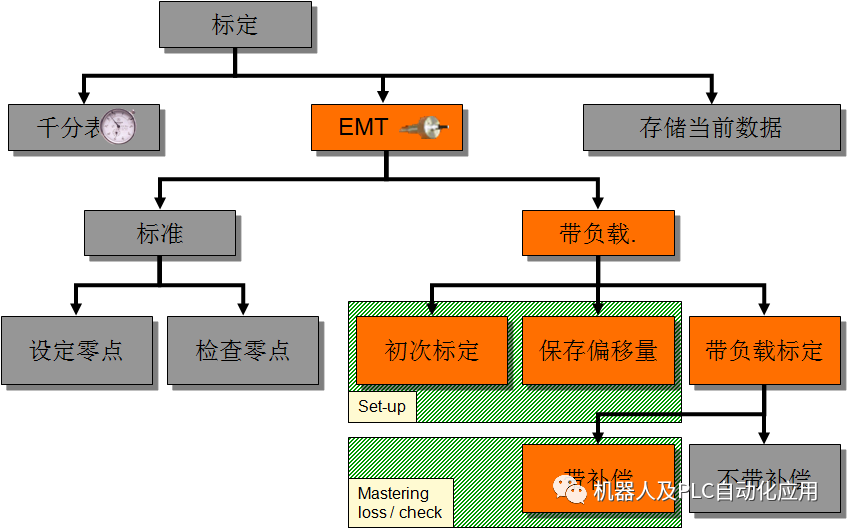
標(biāo)定菜單:
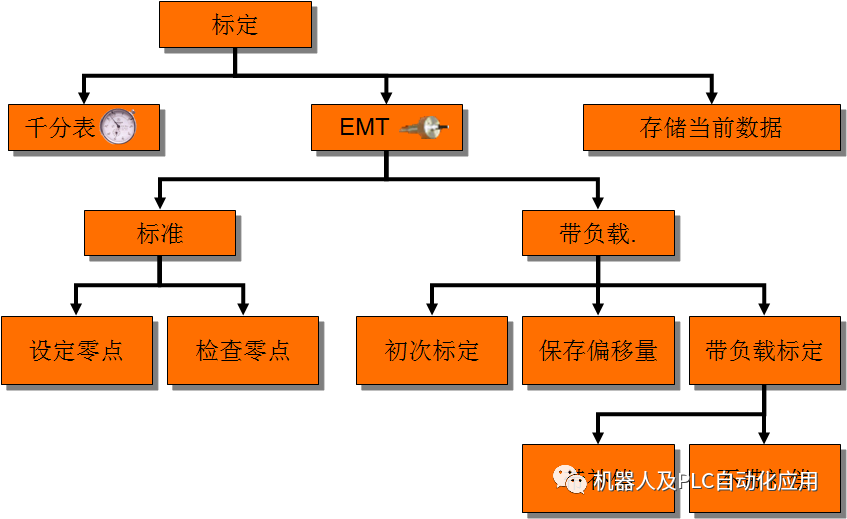
對(duì)于精確定位機(jī)器人的標(biāo)定:
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
31078瀏覽量
222205 -
機(jī)械
+關(guān)注
關(guān)注
8文章
1752瀏覽量
43607 -
自動(dòng)校零
+關(guān)注
關(guān)注
0文章
2瀏覽量
5601
原文標(biāo)題:KUKA-C2機(jī)器人-校零
文章出處:【微信號(hào):gh_a8b121171b08,微信公眾號(hào):機(jī)器人及PLC自動(dòng)化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
在 VisionFive 2 上實(shí)現(xiàn)機(jī)器人伺服控制
再談低溫?zé)Y(jié)銀的應(yīng)用:從春晚四家機(jī)器人出鏡的幕后推手說(shuō)起
機(jī)器人內(nèi)部零配件的生產(chǎn)加工廠從哪找?
探索RISC-V在機(jī)器人領(lǐng)域的潛力
RK3576機(jī)器人核心:三屏異顯+八路攝像頭,重塑機(jī)器人交互與感知
小蘿卜機(jī)器人的故事
機(jī)器人競(jìng)技幕后:磁傳感器芯片激活 “精準(zhǔn)感知力”
工業(yè)機(jī)器人的特點(diǎn)
江智機(jī)器人公司自制的常用機(jī)器人及其主要零部件檢測(cè)裝備




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論