") KUKAC4機(jī)器人零點(diǎn)校正
KUKAC4機(jī)器人零點(diǎn)校正

完整的零點(diǎn)標(biāo)定過程包括為每一個軸標(biāo)定零點(diǎn)。KUKAC4機(jī)器人通過技術(shù)輔助工具 EMD,可為任何一根在 機(jī)械零點(diǎn)位置的軸指定一個基準(zhǔn)值 (例如:0°)。因?yàn)檫@樣就可以使軸的機(jī)械位置和電氣位置保持一致,所以每一根軸都有一個唯一的角度值。
所有機(jī)器人的零點(diǎn)標(biāo)定位置都是相似的,但不盡相同。精確位置在同一機(jī)器人型號的不同機(jī)器人之間也會有所不同。
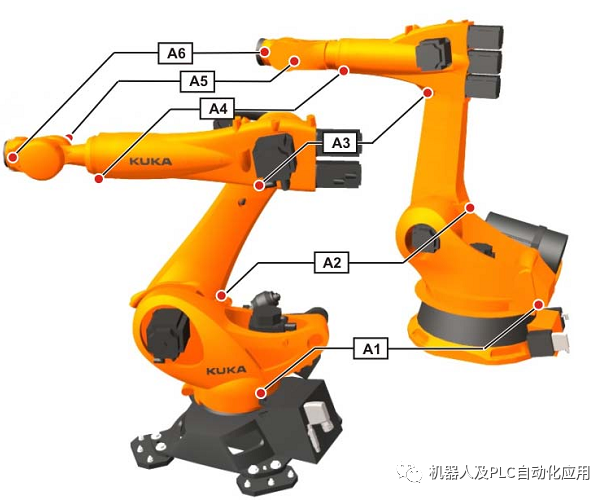
機(jī)械零點(diǎn)位置的角度值:
| A1 | -20° |
| A2 | -120° |
| A3 | +110° |
| A4 | 0° |
| A5 | 0° |
| A6 | 0° |

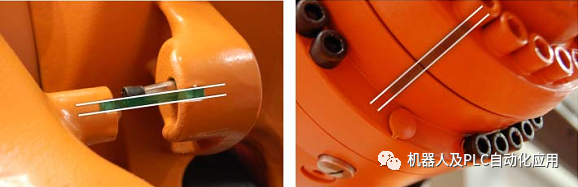
零點(diǎn)標(biāo)定可通過確定軸的機(jī)械零點(diǎn)的方式進(jìn)行。在此過程中軸將一直運(yùn)動,直至達(dá)到機(jī)械零點(diǎn)為止。這種情況出現(xiàn)在探針到達(dá)測量槽最深點(diǎn)時。因此,每根軸都配有一個零點(diǎn)標(biāo)定套筒和一個零點(diǎn)標(biāo)定標(biāo)記。
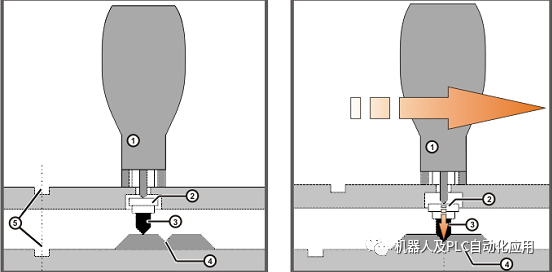
1. EMD (電子控制儀)
2.測量筒
3.探針
4 .測量槽
5.預(yù)零點(diǎn)標(biāo)定標(biāo)記
為何要學(xué)習(xí)偏量?
由于固定在法蘭處的工具重量,機(jī)器人承受著靜態(tài)載荷。由于部件和齒輪箱上材料固有的彈性,未承載的機(jī)器人與承載的機(jī)器人相比,其位置會有所區(qū)別。這些相當(dāng)于幾個增量的區(qū)別將影響到機(jī)器人的精確度。
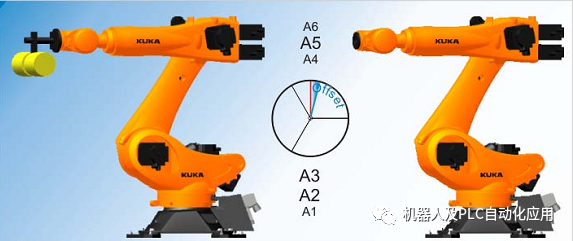
“ 偏量學(xué)習(xí) ” 即帶負(fù)載進(jìn)行。與首次零點(diǎn)標(biāo)定 (無負(fù)載)的差值被儲存。如果機(jī)器人以各種不同負(fù)載工作,則必須對每個負(fù)載都進(jìn)行 “ 偏量學(xué)習(xí) ”。對于抓取沉重部件的抓爪來說,則必須對抓爪分別在不帶構(gòu)件和帶構(gòu)件時進(jìn)行“ 偏量學(xué)習(xí) ”。
Mastery.logMastery.log 零點(diǎn)標(biāo)定偏量值文件位于硬盤的目錄 C:KRCROBOTERLOG 下并含有零點(diǎn)標(biāo)定的特定數(shù)據(jù):
1. 時間戳記 (日期,時間)
2.軸
3. 機(jī)器人的系列號
4. 工具編號
5. 用度表示的偏量值 (Encoder Difference )
6. Mastery.log 舉例:
Date: 22.03.11 Time: 1010
Axis 1 Serialno.: 863334 Tool Teaching for Tool No 5
(Encoder Difference: -0.001209)
Date: 22.03.11 Time: 1044
......
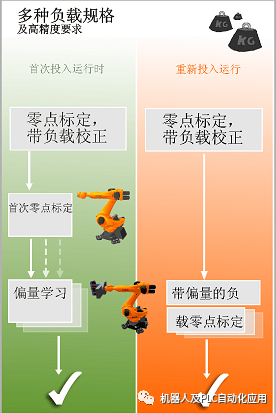
只有經(jīng)帶負(fù)載校正而標(biāo)定零點(diǎn)的機(jī)器人具有所要求的高精確度。因此必須針對每種負(fù)荷情況進(jìn)行偏量學(xué)習(xí)!前提條件是:工具的幾何測量已完成,因此已分配了一個工具編號。

首次零點(diǎn)標(biāo)定:
投入運(yùn)行 > 零點(diǎn)標(biāo)定 > EMD > 首次零點(diǎn)標(biāo)定。
機(jī)器人移到預(yù)零點(diǎn)標(biāo)定位置.
從窗口中選定的軸上取下測量筒的防護(hù)蓋。(翻轉(zhuǎn)過來的 EMD 可用作螺絲刀。)將 EMD 擰到測量筒上。

測量導(dǎo)線連到 EMD 上,并連接到機(jī)器人接線盒的接口 X32 上。

點(diǎn)擊 零點(diǎn)標(biāo)定。
按確認(rèn)開關(guān)和啟動鍵 (啟動正向運(yùn)行)。
當(dāng) EMD 識別到測量切口的最低點(diǎn)時,則已到達(dá)零點(diǎn)標(biāo)定位置。機(jī)器人自動停止運(yùn)行。數(shù)值被儲存。該軸在窗口中消失。證明該軸已經(jīng)校正完成了。
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
31310瀏覽量
223350 -
機(jī)械
+關(guān)注
關(guān)注
8文章
1766瀏覽量
43866 -
EMD
+關(guān)注
關(guān)注
1文章
43瀏覽量
20597
原文標(biāo)題:KUKAC4機(jī)器人零點(diǎn)校正
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機(jī)器人及PLC自動化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
機(jī)器人內(nèi)部零配件的生產(chǎn)加工廠從哪找?
高精度機(jī)器人控制的核心——基于 MYD-LT536 開發(fā)板的精密運(yùn)動控制方案
復(fù)合機(jī)器人開啟血漿包“零接觸”搬運(yùn)新時代

RK3576機(jī)器人核心:三屏異顯+八路攝像頭,重塑機(jī)器人交互與感知
小蘿卜機(jī)器人的故事
【開關(guān)電源控制環(huán)路設(shè)計:Christophe Basso 的實(shí)戰(zhàn)秘籍】極點(diǎn)零點(diǎn) 二
機(jī)器人競技幕后:磁傳感器芯片激活 “精準(zhǔn)感知力”
工業(yè)機(jī)器人的特點(diǎn)
江智機(jī)器人公司自制的常用機(jī)器人及其主要零部件檢測裝備




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論