在這篇文章中,我將嘗試找出關于極點和零點的物理感覺,使用運算放大器來控制它們在復平面中的位置,并利用電路的自然響應來說明極點/零點位置的影響。
2020-09-27 13:07:19 2891
2891 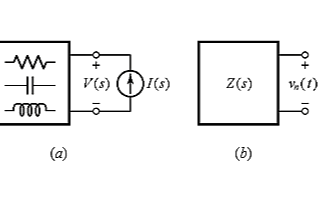
在這里,作者將嘗試找出關于極點和零點的物理感覺,使用運算放大器來控制它們在復平面中的位置,并利用電路的自然響應來說明極點/零點位置的影響。
2022-02-17 16:26:5630407 
請各位大神指導,移動式機器人是怎么做EMC保護的,機器人是鋰電池供電,所以就不能接大地了,那么對機器人的干擾是通過何種方式來釋放或轉移的?
2016-07-26 13:33:14
響應市場要求,加強在國際市場的競爭能力。 視覺是人類獲取信息最重要的來源。人看到一幅圖像,馬上能夠理解圖像的內容和含義。然而,機器視覺并非易事。現有的機器人主要還是以壓力傳感器、位置傳感器等產業傳感器
2015-01-23 15:02:27
的知識,來判定這些零件是不是不良品。某種程度上來說,你可以認為機器視覺是計算機視覺的孩子,因為它使用計算機視覺和圖像處理的技術和算法。但是,雖然它可以用來指導機器人的,他又不完全是機器人視覺。它更側重于
2020-08-28 10:48:50
視覺系統成為研究的新課題。1965年, Stanford建立機器人實驗室開始研究機器人。機器人的定義:【機器人】是一種可以用來移動材料,零件,工具或特定裝置的可以重新編程的多功能操...
2021-09-07 08:37:58
,這些眼睛亦可稱為VO(視覺里程計:單目or立體),維基百科給出的介紹:在機器人和計算機視覺問題中,視覺里程計就是一個通過分析處理相關圖像序列來確定機器人的位置和姿態。當今,由于數字圖像處理和計算機視覺
2019-06-08 08:30:00
labview 視覺機器人抓取工件 CCD相機的二維坐標系的建立?希望分享,謝謝
2017-08-18 20:53:37
現在想做機器人圖像識別方面的研究,有問題請教大家,比如說:現在有十種瓶子,機器人能識別我指定的瓶子,并把它從A位置移動到B位置,關鍵是如何識別呢,不是很清楚,求大神指點!在此感激不盡!
2019-11-04 09:02:57
可以在如下圖所示位置找到。注意:在首次安裝的時候需要將電腦連接網絡,否則可能導致插件安裝失敗。 二、機器人底盤參考坐標系X軸方向為機器人前進方向,Z軸方向為垂直向上。X軸Y軸的零點為底盤的水平
2019-01-24 14:42:36
人類因有眼睛、鼻子、耳朵等感覺器官,而獲得了視覺、聽覺、味覺、嗅覺等不同的外部感覺,機器人也因有傳感器而看見、聽見……這個世界。
2020-08-05 07:55:18
機器人的定義是什么?機器人優點和缺點是什么?機器人是由哪些部分組成的?工業機器人的應用有哪些?
2021-07-05 06:48:21
掃描來確定運動軌跡。從視頻中可以看到,最后機器人通過掃描發現了終點,運動應該停止它就會抽身離去,這樣的工業機器人就具備了完整的視覺,不需要人再去操控它。圖6、圖8都說明了工業機器人搭配視覺的好處,首先
2019-08-16 04:00:00
機器人的移動通常是從管理機器人總體任務進度的中央處理器發出位置變化請求時開始的。導航系統通過制定行程計劃或軌跡以開始執行位置變化請求。行程計劃需考慮可用路徑、已知障礙位置、機器人能力及任何相關的任務目標。
2019-09-10 10:44:32
視覺技術是近幾十年來發展的一門新興技術。機器視覺可以代替人類的視覺從事檢驗、目標跟蹤、機器人導向等方面的工作,特別是在那些需要重復、迅速的從圖象中獲取精確信息的場合。
2019-09-04 08:00:27
安全,對一些特殊工種,如噴涂,鑄造等通過勞動法強制采用工業機器人來代替,這樣可以大大增加工業機器人的需求數量。視覺機器人我國的機器人產業化必須由市場來拉動,機器人作為高新技術,它的發展與社會的生產、經濟狀況
2016-09-08 10:34:05
于機器人控制系統當中。那么今天,我們就通過多軸工業機器人來聊聊機器人控制系統以及控制器的實現。 機器人控制系統 機器人控制系統相當于機器人的大腦,是決定機器人功能和性能的主要部分,它一般分為機器人
2023-02-24 17:05:21
ZN-RAI02工業機器人與視覺實訓平臺是什么?ZN-RAI02工業機器人與視覺實訓平臺有哪些技術性能?ZN-RAI02工業機器人與視覺實訓平臺的結構是由哪些部分組成的?ZN-RAI02工業機器人與視覺實訓平臺有哪些配套軟件?
2021-08-09 06:22:03
作開發基于機器視覺的工業機器人抓取工作站,因抓取物品為亂序堆疊的毛坯零件,且零件不唯一,所以需要一定的深度學習,而出于成本考慮,選用的工控機需求工作穩而不執行大量視覺計算,故考慮單獨加置視覺處理單元,正好
2019-09-18 14:18:14
申請理由:需要大量處理數據,可能還要整合TI的ZSTACK進行無線數據的處理項目描述:康復機器人機械手臂一條,
2015-09-10 11:20:05
申請理由:現在正在參與視覺機器人的項目,想了解更多的關于機器人的產品與知識。項目描述:水果采摘機器人:機器人尋找視野中的水果,并移動到相應的位置,由機械臂進行采摘水果并放到指定的位置。
2015-10-29 11:00:03
的本質是解決“雞與蛋”問題:機器人需要地圖來定位,又需要準確定位來構建地圖。書中從前端(傳感器數據處理)和后端(位姿優化)兩個層面解析了SLAM的算法邏輯。
激光雷達和視覺SLAM各有優劣,例如激光
2025-05-03 19:41:47
`內容簡介本書是關于機器人學和機器視覺的實用參考書, 第一部分“基礎知識”(第2章和第3章)介紹機器人及其操作對象的位置和姿態描述,以及機器人路徑和運動的表示方法;第二部分“移動機器人”(第4章至第
2018-01-17 17:38:11
`內容簡介本書是關于機器人學和機器視覺的實用參考書, 第一部分“基礎知識”(第2章和第3章)介紹機器人及其操作對象的位置和姿態描述,以及機器人路徑和運動的表示方法;第二部分“移動機器人”(第4章至第
2018-04-08 18:19:42
正合作開發基于機器視覺的工業機器人抓取工作站,因抓取物品為亂序堆疊的毛坯零件,且零件不唯一,所以需要一定的深度學習,而出于成本考慮,選用的工控機需求工作穩而不執行大量視覺計算,故考慮單獨加置AI加速器
2019-09-18 19:24:11
拿到一個題目,視覺采摘機器人。目前對視覺處理方面毫無頭緒,由于條件有限,只做出概念實物。機器人只有達到識別該果蔬并采摘下來的效果。有沒有大神提供一下思路。
2018-04-10 09:22:27
` 山東昊威機器人有限公司的書法機器人在展會上可謂是吸睛神器,小伙伴們紛紛前來圍觀,這不,國際友人都不禁為我們昊威書法機器人手動點贊啦!!!厲害啦我的機器人。`
2017-08-11 11:48:54
。這種機器人還可以接受示教而完成各種簡單的重復動作,示教過程中,機械手可依次通過工作任務的各個位置,這些位置序列全部記錄在存儲器內,任務的執行過程中,機器人的各個關節在伺服驅動下依次再現上述位置,故這種
2015-01-19 10:58:38
我們知道DCDC的環路上存在零點和極點,不過這個零點和極點其實是數學公式中推導出來的。
如何從物料的角度來理解這個零點和極點,他們分別具有什么意義呢?
如何更加通俗的來理解這個零點和極點呢?
如何從
2023-07-28 17:33:06
,節約原材料消耗以及降低生產成本,有著十分重要的意義,正在日益改變著人類的生產和生活方式。工業機器人已經廣泛應用于汽車及汽車零部件制造業、機械加工行業、電子電氣行業、橡膠及塑料工業、食品工業、物流等諸多
2015-09-02 14:03:18
連接在一起,例如,人體位置跟蹤和安全距離參數是機器人CPS中工作人員安全的重要考慮因素。機器人系統是高度自動化的系統,消除了元素之間的邊界,通過交互加以彼此連接。有多種基于人的視覺,聽覺和觸覺的人
2020-12-01 14:24:33
在前邊執行了機器人關節速度(位置)實例,也就是前邊說的進入gazebo仿真以后,讓機器人手臂動起來,擺頭等動作,還可以通過rviz來打開嵌入式視覺。在進入了gazebo以后,在進行實例演示的時候
2021-12-20 06:17:05
模式,逐漸向以工業機器人為主導的生產模式轉變。但是,隨著科技的發展和進步,原有單純采用通過示教和預編程來實現自動化工作的機器人產品在柔性生產能力上已經很難滿足現代生產的需要,引入具備機器視覺功能的機器人
2021-04-29 09:42:45
。利用ARM處理平臺,通過RS-485總線驅動電機,驅動機器人行走。 導覽機器人要求傳感器精度稍高,重復性好,抗干擾能力強,穩定性和可靠性高。機器人在行進過程中必須能夠準確獲得其位置信息,數字羅盤可靠輸出
2019-07-04 08:30:00
制造出像人一樣具有智能的能替代人類勞動的機器人,一直是人類的夢想,人類獲取的信息80%以上是通過視覺。因此,在智能機器人的研究中,具有視覺的機器人的研究也就成了第一位的。對機器人視覺伺服系統的研究是機器人領域中的重要內容之一,其研究成果可應用在機器人自動避障、軌跡跟蹤和運動目標跟蹤等問題中。
2019-09-27 08:07:35
如何利用反電動勢的過零點來測轉子位置?
2021-09-24 07:23:04
移動機器人利用導航技術,獲得機器人的目前所處的位置,結合傳感器技術對周圍外界環境(障礙物等)作實時探測,并根據環境提供的信息規劃一條可行路徑完成達到目標點的任務。移動機器人技術涉及到傳感器技術
2020-11-23 15:08:52
如何對采集機器人的關節位置及TCP位置進行虛擬仿真?
2021-10-08 06:31:46
很高,安全,性能超越,這個技術是為航天航空研發的,執行的標準是美軍標,MIL-C-22520系列標準,所有的四芯軸工具都是在此標準技術上發展來的。在這種壓接形式下,我們就根本不用擔心機器人連接
2017-04-25 16:34:23
檢查部件狀態的一個標準。3、重復精度檢查通過使用百分表來確認機器人的重復精度是否正常。4、機械零位測量檢測機器人的當前零位位置與標準標定位置是否一致。5、電機抱閘狀態檢查檢測打開電機抱閘電壓值,測試各軸
2020-09-08 16:15:24
組成(臺皮帶線輸送模組、視覺定位及檢測模組、碼垛模組、裝配模組、打螺絲模組、取料模組、機器人TCP標定模組、PC模組等)。通過對該工業機器人視覺裝配實訓平臺的6關節機器人和平面關節機器人、多功能夾具
2021-07-01 12:05:38
ZN-RAI02工業機器人與視覺實訓平臺一、概述1、ZN-RAI02工業機器人與視覺實訓平臺以工業機器人與機器視覺為核心,將機械、氣動、運動控制、變頻調速、PLC控制技術有機地進行整合,結構
2021-07-01 06:38:35
和壓機的加工設備中。碼垛機:工業機器人將瓦楞紙箱或其他包裝物品以規定的圖案裝載到托盤上。機器人碼垛機依靠固定位置或具有特殊工具的頂置式龍門架機器人,與各個負載組件相連接,構建簡單到托盤頂部的復雜層圖案
2017-09-07 17:20:32
系統可以協助機器人來摘取放置于由標準滑托板隔成數層的箱柜中的部件。這是將部件從一個車間傳到另一個車間甚至在同一個車間內進行傳送的通用方法。如果沒有視覺系統,制造商就必須使用相對較貴的成形塑料墊料或者通過
2018-10-26 16:31:33
%和 15%左右。(資料來源:克來機電(603960,診股)招股說明書).1. 核心零部件工業機器人的核心零部件包括減速機、伺服電機和控制器等。減速機減速機將電動機、內燃機等高速運轉的動力通過輸入軸上
2017-08-23 15:10:27
能力,那么康復機器人就是這些患者最好的選擇。通過復健,這些機器人能加速患者康復進度。9. 護理機器人Cody是一個護理助手,采用直接物理接口(DPI),護士能直接接觸機器人的身體來控制它,如牽手領著機器人
2015-03-02 15:05:49
教你如何從零做一個智能象棋機器人?怎樣去設計一個基于機器視覺與dobot的象棋機器人呢?
2021-12-23 06:22:11
針對移動機器人的局部視覺定位問題進行了研究。首先通過移動機器人視覺定位與目標跟蹤系統求出目標質心特征點的位置時間序列, 然后在分析二次成像法獲取目標深度信息的缺陷的基礎上, 提出了一種獲取目標的空間位置
2019-06-01 08:00:00
掃地機器人在進行清潔工作的過程中,需要涉及到地面的清洗和水的使用。為了避免機器因為水量過多或不足而造成電路故障或無法正常運作的情況,需要通過液位檢測來控制水量。在清水箱中,一個水位傳感器被置于填充
2023-04-15 11:21:46
在物流搬運行業,拳頭機器人由于其獨特的并聯結構,常用于高速整列、裝箱等場合。其中,拳頭機器人的視覺線跟蹤技術正得到廣泛的應用,如下圖所示:
2020-08-06 06:30:31
機器人視覺傳感器詳解一種新型的工業機器人已經走到行業的前沿, 他們的主要特點是能夠安全地協助人類工作。在網上有很多人談論它們,但你認真了解過它嗎?
2020-08-14 07:24:17
提供大顯身手的廣泛舞臺,此時對機器人的要求也越來越高,傳統的通過編程來執行某一特定動作的機器人,將不再能滿足制造業向前發展的需求。很多時候,我們將需要機器人能夠具備識別、分析、處理等更高級的功能,例如
2016-02-03 10:20:33
隨著計算機科學和自動控制技術的發展,越來越多的不同種類的智能機器人出現在工廠、生活當中,機器人視覺系統作為智能機器人系統中一個重要的子系統,也越來越受到人們的重視。它涉及了圖像處理、模式識別和視覺
2020-04-07 07:27:24
視覺系統的發展趨勢怎么樣?3D視覺系統應用在哪些方面?未來的機器人3D視覺系統將會發生什么樣的變化?
2021-05-11 06:40:14
、模擬-數字轉換器和幀存儲器等組成。機器人視覺通過視覺傳感器獲取環境的二維圖像,并通過視覺處理器進行分析和解釋,進而轉換為符號,讓機器人能夠辨識物體,并確定其位置。 具體過程如下: 三、實際
2021-04-12 10:50:55
放料位的位置也會保持不變。 如圖1所示,放置一片模板電芯到CCD下面,視覺抓邊取頂邊與左邊及其交點。以交點做為模板的特征點,左邊做為模板的方向邊。 讓機器人示教一個抓取電芯的點,如圖1所示的這個示
2021-04-07 12:06:47
想用Labview做機器視覺,怎樣將Labview通過視覺算出的工件的偏移量以及偏移角度的值通過Profinet網絡賦于ABB機器人里的變量(變量類型:num)?
2016-10-31 13:15:38
機器人視覺系統是指用計算機來實現人的視覺功能,也就是用計算機來實現對客觀的三維世界的識別。人類接收的信息70%以上來自視覺,人類視覺為人類提供了關于周圍環境 最詳細可靠的信息。人類視覺所具有的強大
2018-12-13 21:23:57
通過視覺傳感器獲取互動表演者的手臂姿態,揮動雙手臂模仿表演者的動作,實現對機器人的仿生模擬控制。邯鄲學舞機器人由一個視覺傳感器、兩個三自由度手臂、機器人身體和視覺處理控制器等組成;該機器人通過視覺傳感器獲取互動表演者的手臂姿態,揮動雙手臂模仿表演者的動作,實現對機器人的仿生模擬控制。
2016-03-28 11:42:25
公司的酷卡機器人有一個調零的程序,就是把機器人移動靠近到防護圍欄上的一個傳感器,直到觸發傳感器動作。在機器人發生碰撞后就提示要求調零,但一直沒搞明白這樣做目的是什么,希望知道的朋友指點一下。
2015-01-14 14:35:30
基于DM642的機器人雙目視覺系統設計
2021-04-02 07:20:41
江智已全面推進康養機器人市場深度系統開發計劃面對老齡化高齡化時代的來臨,尊老愛幼, 關愛老人也是我們中華兒女幾千年來的傳統美德!我們深圳江智機器人公司通過多年來康養市場的融合,已完全了解健康養老所存
2022-04-04 08:13:07
普思立激光自主研發的點錫膏焊接雙工位機器人采用雙龍門雙工位架構,點錫膏與恒溫焊接集成一體,流水式作業,效率更高。
2022-11-21 13:59:22
提出了一種微小爬壁機器人三維位置測量的新方法。筆者通過深入分析研究各種位置測控方法與系統,提出采用單目視覺方法中的聚焦法,以CCD 作為傳感器,用三點法實現對機器人的三
2009-07-06 09:40:28 7
7 下肢外骨骼康復機器人BEAR-A1利用仿生學、人體工學、機器人技術,為下肢運動功能障礙者提供康復訓練。通過對患者髖、膝關節提供助力完成康復訓練,可以有效降低治療師工作強度,提高康復訓練效率,提高患者
2023-09-20 17:31:33
GTS機器人空間位置精度激光追蹤儀是高精度、便攜式的空間大尺寸坐標測量機,是同時具高精度(μm級)、大工作空間(百米級)的高性能光電測量儀器,被廣泛應用在飛機、汽車、船舶、航天、機器人、核電
2024-12-27 14:41:22
GTS機器人位置精度激光跟蹤測量儀是高精度、便攜式的空間大尺寸坐標測量機。它集激光干涉測距技術、光電檢測技術、精密機械技術、計算機及控制技術、現代數值計算理論于一體,主要用于百米大尺度空間三維坐標
2025-04-14 11:00:17
一、哪些情況需要標定零點 零點是機器人坐標系的基準,沒有零點,機器人就沒有辦法判斷自身的位置。 機器人在如下情況下要重新標定零點: 1.進行更換電機、機械系統零部件之后。 2.超越機械極限位置,如
2017-09-19 18:31:0815 本文設計了一種基于STM32的力反饋型康復機器人控制系統設計,該機器人系統主要由機械臂機械結構、電機、位置傳感器、扭矩傳感器、電機驅動器、機器人控制器和上位機組成。采用扭矩傳感器實現系統的力反饋功能
2017-12-25 13:59:376286 
根據載波個數、調制波的周期時間等可預測出過零點出現的時刻,然后依照預測出的過零點信號進行30°延時換相,這樣就可以使無刷直流電機正常地換相運行。一般來說,此方法預測的過零點的位置容易與實際的過零點位置相差一到兩個載波周期,穩定性相對比前幾種方法稍差一些,在電機高頻運轉時尤為突出。
2018-09-26 16:34:004259 
近來,通過KOSDAQ上市奠定了發展基礎。..。通過醫療康復機器人?物流機器人實現事業的多元化
2018-12-05 11:25:242152 將嘗試找出關于極點和零點的物理感覺,使用運算放大器來控制它們在復平面中的位置,并利用電路的自然響應來說明極點/零點位置的影響。 單端口電路的自然響應 我們來看圖1中的無源線性單端口電路,它包括電阻、電容和電感
2019-01-04 16:21:011413 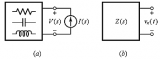
差壓式液位計的零點遷移量的實質是:由于變送器(以4~20mADC輸出的變送器為例)的安裝位置的變化,造成了當液位是零時,而變送器的輸出不是零(4mADC),為了使變送器的輸出是零(與液位的零位相對應),將變送器的零點進行了遷移。也就是改變送器的零點。
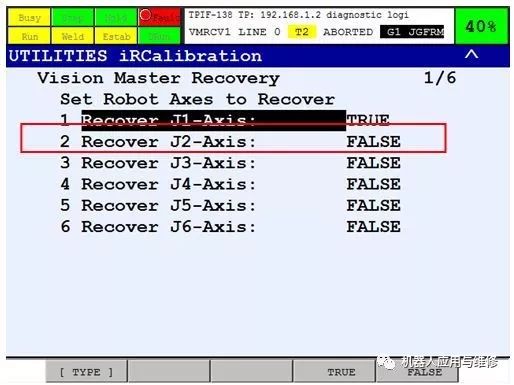
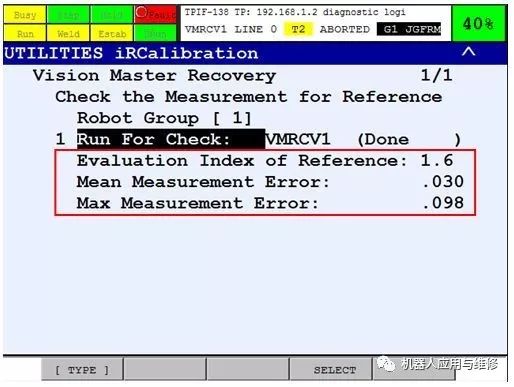
2019-11-29 10:35:2315970 發那科機器人的視覺功能作為工業機器人的眼睛,助力機器人實現更多的應用場景,尤其是在分揀應用中,它能夠根據零件的不同作業以實現工廠對機器人的任務要求。今天小編整理了關于FANUC機器人24個視覺功能,我們一起來學習!
2020-04-12 11:47:2110054 
零點標定可通過確定軸的機械零點的方式進行。在此過程中軸將一直運動,直至達到機械零點為止。這種情況出現在探針到達測量槽最深點時。因此,每根軸都配有一個零點標定套筒和一個零點標定標記。
2020-06-12 15:15:154505 機器人零位校正后,可以用直角坐標系移動機器人或運行程序; 同時機器人也知道軟限位的位置.
2020-06-12 15:48:082850 零點標定可通過確定軸的機械零點的方式進行。在此過程中軸將一直運動,直至達到機械零點為止。這種情況出現在探針到達測量槽最深點時。因此,每根軸都配有一個零點標定套筒和一個零點標定標記。
2020-06-30 16:52:044133 
就不能正確的運動,此時就需要重新校準零點。 如何找回零點 1)發現位置出現偏差,確定零點位置丟失; 2)將機器人手動操作移動至原零點相近位置; 3)將多圈值清零并填回原記錄的單圈值; 4)零點即找回。 什么情況下需要找回零
2021-02-12 11:51:0011039 為了對當前上肢康復機器人關鍵技術分析及未來發展方向預測,通過對世界范圍內外骨骼式及末端牽引式上肢康復機器人研究現狀分別進行介紹分析,從整體構型、控制系統及人機交互三方面總結各典型上肢康復機器人
2021-06-18 16:23:148 所有機器人的零點標定位置都是相似的,但不盡相同。精確位置在同一機器人型號的不同機器人之間也會有所不同。
2022-08-15 10:13:592679 完整的零點標定過程包括為每一個軸標定零點。KUKAC4機器人通過技術輔助工具 EMD,可為任何一根在 機械零點位置的軸指定一個基準值 (例如:0°)。
2022-12-12 11:11:1612008 未進行零點復歸測試,參考點開關被觸發至少 5 分鐘。參考點開關安裝在錯誤的位置上或被移動。
2022-12-26 11:33:252238 機器人的零點標定是需要將機器人的機械信息和位置信息同步,來定義機器人的物理位置,從而使機器人能夠準確地按照原定位置移動。
2023-02-16 10:46:015407 伺服電機的零點校準是確保電機運動控制的精度和穩定性的關鍵步驟,通常包括以下步驟:
確認機械結構是否處于零點位置:在進行零點校準之前,需要確認機械結構是否已經正確安裝,并處于正確的零點位置。如果機械結構沒有正確安裝或已經發生了偏移,那么進行零點校準可能會導致電機的控制精度降低。
2023-03-07 14:57:2113233 完整的零點標定過程包括為每一個軸標定零點。KUKAC4機器人通過技術輔助工具 EMD,可為任何一根在 機械零點位置的軸指定一個基準值 (例如:0°)。因為這樣就可以使軸的機械位置和電氣位置保持一致
2023-04-14 16:06:541918 當機器人校正的時候,各個軸就可以運動到一個特定的機械位置,也就時所謂的機械零點。一旦機器人運動到機械零點,各個軸上的絕對編碼盤的值就被保存下來了。
2023-09-04 16:57:101720 
什么是零點漂移?如何抑制零點漂移?零點漂移怎么解決?? 零點漂移是指在沒有外力作用的情況下,傳感器輸出值的基準值(稱為零點)發生漂移。例如,在溫度傳感器中,當溫度變化很小或較為穩定時,如果傳感器輸出
2023-09-19 17:33:5723682 零點標定可通過確定軸的機械零點的方式進行。在此過程中軸將一直運動,直至達到機械零點為止。這種情況出現在探針到達測量槽最深點時。因此,每根軸都配有一個零點標定套筒和一個零點標定標記。
2023-09-23 09:20:161523 
在機器人零點校正時,軸被移到一個定義的機械位置,即所謂機械零位。如果機器人在這機械零位, 那么每個軸的絕對傳感器值被存儲。零點標定目的是使機器人各軸的軸角度與連接在各軸電機上的絕對值編碼器的脈沖計數值對應起來的操作。具體而言,是為了求取零度姿勢的脈沖計數值的操作。
2023-11-19 16:19:415042 
當前位置重新設置為零點。
2、軟件校準:校準過程中,我們需要先停止測量,將編碼器連接到計算機或其他設備上,并使用相應的軟件進行設置和校準,可以恢復正確的零點位置。在
2023-12-05 09:20:093240 
一些編碼器會在其旋轉軸上標記一個特殊的標記點,例如一個凹槽或凸起。通過在編碼器旋轉到特定位置時對標記點進行檢測,可以確定零位。
2024-01-18 14:49:403857 編碼器零點位置怎么看 要確定編碼器的零點位置,可以通過以下幾種方式進行觀察: 1. 物理標記點:一些編碼器在其旋轉軸上具有專門的物理標記點,例如凹槽或凸起。通過觀察軸上的標記點,可以確定零點位置
2024-02-18 18:28:194681 
零點位置是通過程序復位控制回零或者在回零過程中感應到原點限位的時候,把當前位置值清零,表示原點或零點,一切位置都是以原點為基礎,確定零點位置的時候,應先確定運動的正向和負向,以及電機的實際運動方向。
2024-03-20 14:07:476648 結合了現代機器人技術與康復醫學,通過模擬正常人體的運動模式、提供輔助力量和智能反饋,幫助患者完成各種康復訓練,從而促進神經系統功能的恢復。康復機器人的發展,有望為神
2024-07-02 10:25:09985 
方向角度傳感器是一種用于測量物體相對于某個參考方向的角度變化的傳感器。它廣泛應用于航空航天、機器人、汽車、船舶、導航等領域。在這些應用中,方向角度傳感器的零點位置至關重要,因為它決定了傳感器的測量
2024-07-22 16:04:421616
 電子發燒友App
電子發燒友App











 工商網監
工商網監
評論