 電子發(fā)燒友App
電子發(fā)燒友App



2022高工鋰電智能制造峰會(huì)最新議程,請(qǐng)查收! ? ? ? 回顧2022年,疫情肆虐。全球供應(yīng)鏈不穩(wěn)定性加劇,移動(dòng)機(jī)器人行業(yè)2022年整體承壓較大。即使這樣,高工機(jī)器人產(chǎn)業(yè)研究所(GGII)統(tǒng)計(jì)數(shù)據(jù)顯示,2022年第四季度,隨著防疫措施放寬,積壓訂單釋放,工業(yè)機(jī)器人產(chǎn)量(含移動(dòng)機(jī)器人)同比增長(zhǎng)25.84%,環(huán)比增長(zhǎng)3.73%。 ? 在2022年(第三屆)高工移動(dòng)機(jī)器人年會(huì)上,高工機(jī)器人董事長(zhǎng)張小飛博士在《變局之下的韌性與生長(zhǎng)》的主題演講中,從現(xiàn)狀、思考到如何破局,從宏觀方面對(duì)移動(dòng)機(jī)器人2022年做了一個(gè)總結(jié),并對(duì)2023年做了分析之后的瞻望。
回顧丨2022年行業(yè)關(guān)鍵詞:泥沼中負(fù)重前行
? 2022年中國(guó)市場(chǎng)移動(dòng)機(jī)器人銷量超8萬臺(tái),同比增速低于30%,其中無人叉車、料箱機(jī)器人表現(xiàn)較好,磁導(dǎo)AGV在汽車和新能源行業(yè)帶動(dòng)下仍維持一定增長(zhǎng)。從下游應(yīng)用市場(chǎng)來看,2022年,新能源、汽車、煙草、石化行業(yè)表現(xiàn)較好,電商、3C電子、醫(yī)藥、面板等行業(yè)需求相對(duì)低迷。 可以說,移動(dòng)機(jī)器人廠商在2022年是負(fù)重前行,在泥沼中尋找新的道路。 ? 這些困難主要表現(xiàn)為:下游需求分化明顯、利潤(rùn)空間縮小、訂單不足、項(xiàng)目推遲、融資難、回款難、現(xiàn)金流不足、棄單、核心零部件漲價(jià)、生產(chǎn)經(jīng)營(yíng)的不確定性加劇等。因此,縱觀全年,有60%企業(yè)反映訂單不足,75%企業(yè)反映毛利下降,50%企業(yè)反映回款延后,近90%的展會(huì)取消或延期,超30%的企業(yè)裁員等。這也使得本體企業(yè)增長(zhǎng)明顯放緩,進(jìn)入增收不增利的惡行循環(huán)怪圈中。 ?

拋開大環(huán)境,造成這種現(xiàn)象的原因我們總結(jié)以下五點(diǎn)行業(yè)共識(shí): ? 一是戰(zhàn)略思路不清晰,產(chǎn)品還是方案?國(guó)內(nèi)還是國(guó)外?繼續(xù)固守老本行,還是積極探索新應(yīng)用?不少企業(yè)戰(zhàn)略思路一直搖擺不定。 ? 二是過于依賴資本、融資難度增加,致使現(xiàn)金流不足。 ? 據(jù)GGII不完全統(tǒng)計(jì),2022年移動(dòng)機(jī)器人領(lǐng)域共發(fā)生33起投融資事件,總計(jì)金額超51.55億元,其中無人叉車和AMR兩大領(lǐng)域融資案例占比達(dá)70%;融資數(shù)量下降,但單筆融資金額增長(zhǎng)近26%,資本集中流向頭部廠商,各廠商之間差距正在逐漸擴(kuò)大,馬太效應(yīng)俞發(fā)明顯。 ? 三是供應(yīng)鏈準(zhǔn)備不足。如華東供應(yīng)鏈斷裂事件,是核心部件漲價(jià)的罪魁禍?zhǔn)住?? 四是企業(yè)擴(kuò)張?zhí)欤斐扇肆θ哂啵黾庸芾碡?fù)擔(dān),使企業(yè)面臨的業(yè)績(jī)壓力太大。 ? 五是行業(yè)在使勁卷。先是價(jià)格戰(zhàn),使得毛利下降、利潤(rùn)空間縮小,企業(yè)生存艱難。戰(zhàn)略合作方面各抒己見,難以統(tǒng)一。 ?

用張小飛的話說,2022年工廠的加工率只有30~60%之間,理想的企業(yè)只有60%生產(chǎn),生產(chǎn)得越多虧得越多。即使市場(chǎng)環(huán)境較好的新能源領(lǐng)域,跟2021年相比,也呈現(xiàn)低迷狀況。但由于疫情的影響,很多企業(yè)在2020-2022年都在吃老本。 ? 但張小飛也強(qiáng)調(diào),隨著“中國(guó)制造2025”以及工業(yè)4.0等利好政策的推動(dòng),我國(guó)的智能制造水平、機(jī)器人發(fā)展非常迅速。中國(guó)的機(jī)器人市場(chǎng)將在政策、市場(chǎng)等催化下,表現(xiàn)出極強(qiáng)的競(jìng)爭(zhēng)力。??
破局丨面臨困局如何尋找突破口
面對(duì)困局,尋找破局之策,是每個(gè)企業(yè)的首要解決方案。
以頭部廠商為例,一般采取了融資、擴(kuò)張、并購(gòu)三個(gè)傳統(tǒng)方法。頭部廠商因?yàn)榘l(fā)展好,在融資方面,相對(duì)于腰部及以下企業(yè),有絕對(duì)優(yōu)勢(shì);這也使得一些頭部廠商,率先實(shí)現(xiàn)上市,增強(qiáng)了綜合實(shí)力。除此之外,獲取訂單,積極搶占新興市場(chǎng);兼并或合并有核心技術(shù)、性價(jià)比高的廠商,也是頭部廠商的破局絕招。

但張小飛也強(qiáng)調(diào),并購(gòu)雖然是有核心技術(shù),但是千萬別抱著撿便宜的心態(tài),別踩中國(guó)知識(shí)產(chǎn)權(quán)保護(hù)的“雷區(qū)”。
除去頭部廠商,腰部廠商也從小規(guī)模裁減人員、保留核心業(yè)務(wù)、核心客戶,積極與同行、產(chǎn)業(yè)鏈上下游建立“合作”關(guān)系,積極提高企業(yè)經(jīng)營(yíng)效率(如交付、復(fù)購(gòu)、客單價(jià)等)方面著手尋找破局之策。張小飛戲言,“腰部企業(yè)是有點(diǎn)像家里的老二,非常靈活,能夠上下貫通”。但腰部企業(yè)也有致命的弱點(diǎn):很容易膨脹,也因此在發(fā)展道路上,沒少踩雷。
再就是腰部以下的廠商,因?yàn)闆]有頭部廠商和腰部企業(yè)的優(yōu)勢(shì),在破局方面更加謹(jǐn)慎,以致于以裁減人員,來減少不必要的開支;拼命維系好現(xiàn)有業(yè)務(wù),服務(wù)好老客戶。從行業(yè)發(fā)展來看,以裁員、守本、生存為目的的這類小企業(yè),生存更加艱難。
而一些新晉廠商,如零部件、本體、集成商等企業(yè),則從產(chǎn)品類型和行業(yè)應(yīng)用上下功夫,在無人叉車、AMR、復(fù)合、料箱、3C、鋰電等方面努力站穩(wěn)腳跟。這也使得下游應(yīng)用行業(yè)分化明顯,如新能源行業(yè)需求火熱(超80%增長(zhǎng),主要是鋰電),汽車、石化、煙草表現(xiàn)出色,3C、電商、食品等行業(yè)表現(xiàn)一般等。
總之,不管是頭部廠商還是腰部及以下企業(yè),都在艱難中尋求新的破局之策。
上車丨新的增長(zhǎng)點(diǎn)上車還來得及嗎?
?
2022年移動(dòng)機(jī)器人市場(chǎng)的情況不容樂觀,所以,尋找新的增長(zhǎng)點(diǎn),是維系一個(gè)企業(yè)持續(xù)盈利的根本。以商貿(mào)物流和工業(yè)物流來比較,2022年商貿(mào)領(lǐng)域需求增速低于25%,工業(yè)領(lǐng)域成移動(dòng)機(jī)器人主要增長(zhǎng)動(dòng)力。
所以,上車前應(yīng)該知道,這個(gè)行業(yè)是否值得投入。
以鋰電行業(yè)為例:據(jù)國(guó)家稅務(wù)總局最新數(shù)據(jù)顯示,2022年,全國(guó)免征新能源車輛購(gòu)置稅879億元,開發(fā)票銷售量568.1萬輛,新能源汽車市場(chǎng)滲透率為23.5%。
其中,動(dòng)力電池和消費(fèi)電池構(gòu)成了整個(gè)鋰電行業(yè)工業(yè)機(jī)器人市場(chǎng)的大盤。鋰電行業(yè)的移動(dòng)機(jī)器人應(yīng)用以國(guó)產(chǎn)廠商為主導(dǎo),國(guó)產(chǎn)廠商基于高性價(jià)比、高穩(wěn)定性、高服務(wù)品質(zhì)的優(yōu)勢(shì),不斷獲得鋰電廠商的認(rèn)可。移動(dòng)機(jī)器人由于能夠有效提高鋰電產(chǎn)線生產(chǎn)效率、降低運(yùn)營(yíng)成本、打通廠內(nèi)數(shù)據(jù)閉環(huán)等,目前,移動(dòng)機(jī)器人在產(chǎn)線工序鏈接及線邊倉(cāng)的重要程度也愈來愈顯無可替代的地位。值得關(guān)注的是,機(jī)器人和模組PACK段,單線需求量每年就以20%的速度增長(zhǎng)。
鋰電行業(yè)玩家也因此快速增長(zhǎng)。如倉(cāng)儲(chǔ)集成商有中鼎集成、安歌科技、今天國(guó)際、凱樂士、蘭劍智能、羅伯泰克、東杰智能、創(chuàng)智科技、霍尼韋爾、曠視機(jī)器人、先導(dǎo)智能等;AGV本體廠商有海康機(jī)器人、華睿科技、杭叉智能、佳順智能、國(guó)自機(jī)器人、艾吉威、極智嘉、優(yōu)艾智合、未來機(jī)器人、木牛流馬、斯坦德機(jī)器人、新松機(jī)器人、冠鴻智能、迦智科技、嘉騰機(jī)器人、CSG華曉、藍(lán)芯科技等,呈蓬勃發(fā)展之勢(shì)。
鋰電行業(yè)對(duì)移動(dòng)機(jī)器人的需求有多大?GGII數(shù)據(jù)顯示,2021年出貨6800臺(tái),2022年有望超1.2萬臺(tái)。GGII認(rèn)為,2023年移動(dòng)機(jī)器人市場(chǎng)需求有望加速,市場(chǎng)增速將超過35%,下游重點(diǎn)關(guān)注汽車(含新能源汽車)、鋰電、光伏、儲(chǔ)能、半導(dǎo)體等。
所以,移動(dòng)機(jī)器人行業(yè)能否上車,這些數(shù)據(jù)就已經(jīng)說明問題。
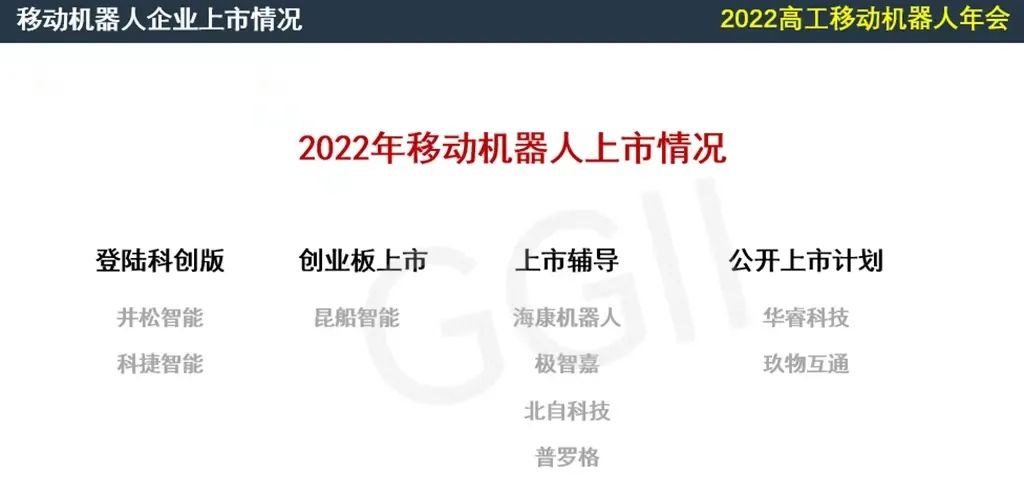

截至2022年12月,井松智能、科捷智能已成功登陸科創(chuàng)板,昆船智能登陸創(chuàng)業(yè)板,海康機(jī)器人、極智嘉、北自科技、普羅格已進(jìn)入上市輔導(dǎo)階段,同時(shí),華睿科技、玖物互通已公開宣布上市計(jì)劃,越來越多移動(dòng)機(jī)器人企業(yè)進(jìn)入上市倒計(jì)時(shí)。
現(xiàn)在,2023年第一季度已經(jīng)過半,隨著第一波疫情結(jié)束,市場(chǎng)出現(xiàn)了看得見的需求反彈。但目前消費(fèi)不景氣,經(jīng)濟(jì)下行壓力較大,預(yù)計(jì)反彈力度有限。
GGII預(yù)判:新能源行業(yè)在未來3年將延續(xù)高增長(zhǎng)態(tài)勢(shì),擴(kuò)產(chǎn)潮的延續(xù)將對(duì)AGV/AMR產(chǎn)生較大的需求拉力,預(yù)計(jì)2023年新能源行業(yè)(鋰電,光伏等)對(duì)移動(dòng)機(jī)器人的需求占比有望突破24%。但市場(chǎng)仍面臨訂單、交付、現(xiàn)金流等問題,預(yù)計(jì)短期內(nèi)企業(yè)經(jīng)營(yíng)仍有一定壓力。
編輯:黃飛
?
















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論