 電子發(fā)燒友App
電子發(fā)燒友App



摘要:運(yùn)動規(guī)劃是移動機(jī)器人自主導(dǎo)航系統(tǒng)中的重要模塊之一,相關(guān)算法研究成果層出不同窮,本文根據(jù)規(guī)劃算法特性,劃分為圖規(guī)劃算法、空間采樣算法、曲線插值擬合算法和仿生智能算法四個(gè)子類,并從移動機(jī)器人運(yùn)動的角度對部分經(jīng)典研究成果進(jìn)行分析和總結(jié)。
01
引言
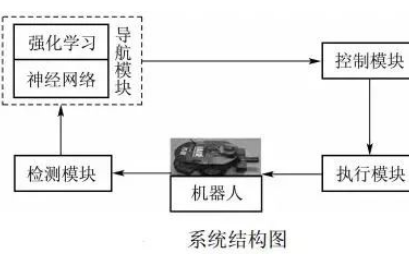
移動機(jī)器人運(yùn)動行為是由自主導(dǎo)航系統(tǒng)決定的,自主導(dǎo)航系統(tǒng)主要包含感知、規(guī)劃、控制與定位四個(gè)模塊,感知模塊是連接機(jī)器人與環(huán)境的橋梁,其作用是“閱讀、提取”環(huán)境內(nèi)容;規(guī)劃模塊是連接感知與控制的橋梁,其作用是“分析、理解”環(huán)境內(nèi)容,根據(jù)用戶目標(biāo)及需求輸出可執(zhí)行控制命令,因此感知、規(guī)劃模塊是決定導(dǎo)航系統(tǒng)智能程度的關(guān)鍵。
圖 1.1 運(yùn)動規(guī)劃示意圖(圖片來源:http://wiki.ros.org/navigation)
運(yùn)動規(guī)劃一直是機(jī)器人領(lǐng)域非常經(jīng)典的研究熱點(diǎn)之一,諸多學(xué)者和研究機(jī)構(gòu)針對運(yùn)動規(guī)劃中的科學(xué)問題進(jìn)行了深入研究。運(yùn)動規(guī)劃算法針對不同的應(yīng)用場景有著不同的研究側(cè)重點(diǎn),比如游戲領(lǐng)域,游戲任務(wù)從A點(diǎn)運(yùn)動到B點(diǎn)的運(yùn)動規(guī)劃需求是計(jì)算消耗內(nèi)存小、計(jì)算實(shí)時(shí)性好,路徑質(zhì)量要求可能需要太高;而在全局規(guī)劃領(lǐng)域,如百度地圖等應(yīng)用,則側(cè)重研究如何快速找到一條從起點(diǎn)到終點(diǎn)的可行的路徑,并不會關(guān)注整條路徑的細(xì)節(jié)問題;而在機(jī)器人運(yùn)動過程中,就需要側(cè)重關(guān)注軌跡曲線的質(zhì)量。?
細(xì)心讀者可能發(fā)現(xiàn)了,這里的規(guī)劃都是依賴于地圖的,路徑是依托于地圖的,不同的地圖使用的規(guī)劃算法是有區(qū)別的,這可以在《機(jī)器人環(huán)境感知研究現(xiàn)狀簡述》中獲知不同類型的地圖及其對應(yīng)的特點(diǎn)、適用場景。?
此外,路徑規(guī)劃中也包含路徑搜索這塊方向,路徑搜索不僅僅是用于搜索路徑,還可以用于搜索目標(biāo),比如藥物結(jié)構(gòu)的搜索,采用智能算法,給定初始條件和篩選條件,讓算法在指定區(qū)域搜索藥物分子結(jié)構(gòu)。?
為提升機(jī)器人在不同場景下的自主運(yùn)動能力,適用于不同環(huán)境的運(yùn)動規(guī)劃算法層出不窮,本文將根據(jù)算法原理分類、研究時(shí)間排序,整理概述該研究領(lǐng)域的進(jìn)展及成果。
02規(guī)劃算法研究分析
在分析之前需要先補(bǔ)充點(diǎn)概念:運(yùn)動規(guī)劃、軌跡規(guī)劃和路徑規(guī)劃之間是什么關(guān)系??
路徑規(guī)劃指的是在地圖上生成一條連接起點(diǎn)和終點(diǎn)的路徑曲線,該路徑曲線不會與地圖中的障礙物相交,且均在可行區(qū)域,路徑曲線Path可以用離散的點(diǎn)序列表示:
式中,(xk,?yk)表示地圖坐標(biāo)系下的路徑點(diǎn)位置。?
軌跡規(guī)劃顧名思義就是在地圖上生成一條連接起點(diǎn)和終點(diǎn)的軌跡曲線,而軌跡曲線是路徑曲線和速度曲線相耦合的復(fù)合曲線,換句話說,就是軌跡曲線Traj包含了位置、速度和時(shí)間等信息,離散化后可表示為:
式中,(xt, yt)表示地圖坐標(biāo)系下的t時(shí)刻路徑點(diǎn)位置,而(vt, wt)表示t時(shí)刻機(jī)器人的運(yùn)動速度。?
運(yùn)動規(guī)劃狹義上和軌跡規(guī)劃的概念非常接近,區(qū)別在于不同的機(jī)器人的運(yùn)動學(xué)/動力學(xué)模型是不一樣的,比如多軸機(jī)械臂、移動機(jī)器人等,運(yùn)動規(guī)劃需要做的事情是需要先規(guī)劃出上述軌跡曲線,接著結(jié)合動力學(xué)模型,將軌跡曲線轉(zhuǎn)化為每個(gè)電機(jī)的運(yùn)動控制曲線,控制電機(jī)沿著該控制曲線運(yùn)動,以實(shí)現(xiàn)機(jī)器人沿著規(guī)劃的目標(biāo)軌跡曲線運(yùn)動。?
<回歸正題>
如圖 2.1所示,運(yùn)動規(guī)劃的研究主要是對多目標(biāo)多變量多約束耦合的規(guī)劃模型優(yōu)化求解,目標(biāo)需求非常多,包括模型硬約束,如軌跡曲線需要滿足機(jī)器人運(yùn)動學(xué)和動力學(xué)模型約束,同時(shí)還需要滿足避障約束,也就是說該軌跡曲線的最基礎(chǔ)要求就是機(jī)器人實(shí)際上能夠跟隨運(yùn)動且不會發(fā)生碰撞;而規(guī)劃需求軟約束則包實(shí)時(shí)性好、動態(tài)適應(yīng)性好、計(jì)算成本低等,這些約束根據(jù)不同的應(yīng)用場景是不一樣的,用戶體驗(yàn)也是存在差異的,故而稱為軟約束。?
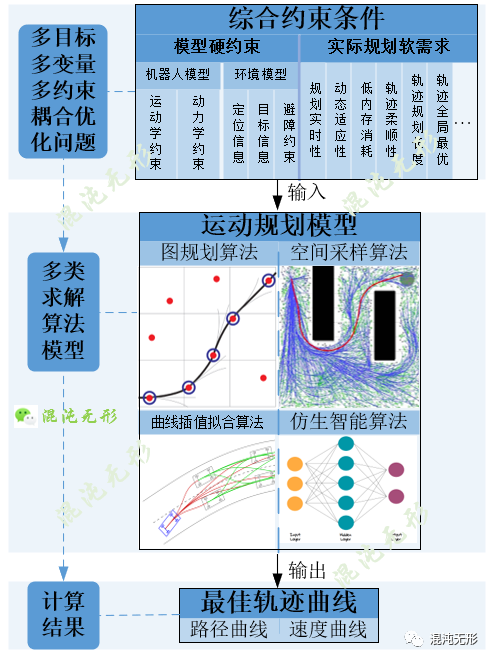
圖 2.1 運(yùn)動規(guī)劃通用模型
此外,對于具有非完整約束的移動機(jī)器人而言(見《兩輪差速驅(qū)動機(jī)器人運(yùn)動模型及應(yīng)用分析》),在分布有障礙物的環(huán)境中求解最優(yōu)路徑是NP-hard問題,即對于任意場景無法保證在多項(xiàng)式時(shí)間內(nèi)求得最優(yōu)解,因此大部分規(guī)劃算法追求次優(yōu)解或局部最優(yōu)。?
運(yùn)動規(guī)劃研究歷史長久、算法相當(dāng)多,除了上述提到的約束多外,當(dāng)前運(yùn)動規(guī)劃的研究難點(diǎn)是什么呢??
筆者認(rèn)為難點(diǎn)之一是如何處理存在耦合關(guān)系的路徑與速度曲線的優(yōu)化問題,常用方式有三種:?
1)路徑-速度完全脫離處理:僅單純生成平滑路徑,再使用曲線跟蹤算法控制機(jī)器人運(yùn)動,該方法動態(tài)避障性能偏弱。?
2)路徑-速度循環(huán)迭代優(yōu)化:先生成無碰撞路徑(靜態(tài)避障),再基于該路徑生成穩(wěn)定好的無碰撞速度曲線(動態(tài)避障),并通過循環(huán)迭代優(yōu)化算法生成最佳軌跡曲線,該方法降低優(yōu)化維度,提升了優(yōu)化效率。?
3)路徑-速度“捆綁”優(yōu)化:綜合考慮所有的約束關(guān)系及優(yōu)化目標(biāo),生成最優(yōu)軌跡曲線,該方法生成的軌跡效果很好,但存在優(yōu)化模型構(gòu)造難度大、優(yōu)化效率不高等問題。?
諸多學(xué)者針對不同應(yīng)用場景和需求,設(shè)計(jì)、改進(jìn)了非常多的運(yùn)動規(guī)劃算法,筆者將常見的運(yùn)動規(guī)劃算法主要分為四類:圖規(guī)劃算法、空間采樣算法、曲線插值擬合算法和仿生智能算法。?
接下來,筆者將從逐一介紹這四個(gè)子類規(guī)劃算法的概況。
2.1 ? 圖規(guī)劃算法
圖規(guī)劃算法多數(shù)將環(huán)境模型離散化表達(dá),如柵格圖等,其離散節(jié)點(diǎn)描述相應(yīng)狀態(tài),建立節(jié)點(diǎn)間聯(lián)系,并求解最優(yōu)路徑。?
如圖 2.2所示,圖規(guī)劃算法根據(jù)路徑生成方式的不同分為三類,其中以圖搜索算法為主,以及BUG算法和勢場力算法。?
具體相關(guān)分析可閱讀《機(jī)器人圖規(guī)劃算法研究現(xiàn)狀簡述》。
(請橫屏看圖)
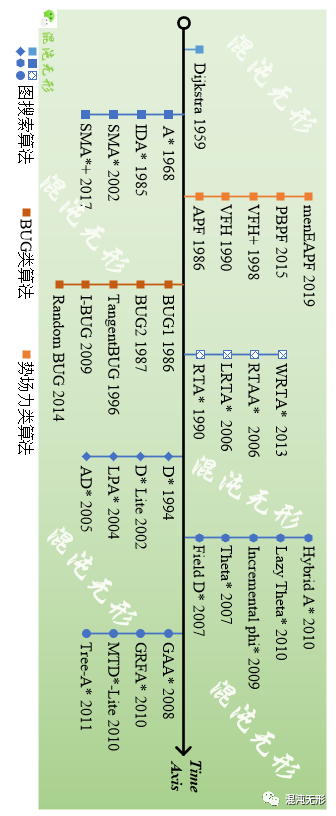
圖 2.2 圖規(guī)劃算法發(fā)展路線概況
2.2 ? 空間采樣算法
空間采樣算法按照采樣空間不同,可分為:狀態(tài)空間采樣和運(yùn)動空間采樣。?
如圖 2.3所示,基于狀態(tài)空間采樣的算法能夠在大面積、高緯度的空間中快速生成路徑,包括RRT和PRM類算法等,具有概率完備性,其主要步驟包括隨機(jī)采樣、度量連接、碰撞檢測和路徑查詢。?
基于運(yùn)動空間采樣的算法則在速度空間等距采樣,通過評價(jià)函數(shù)選擇最佳控制指令,驅(qū)動機(jī)器人運(yùn)動,主要包括CVM類算法及DWA類算法等。?
具體相關(guān)分析可閱讀《機(jī)器人空間采樣算法研究現(xiàn)狀簡述》。
(請橫屏看圖)
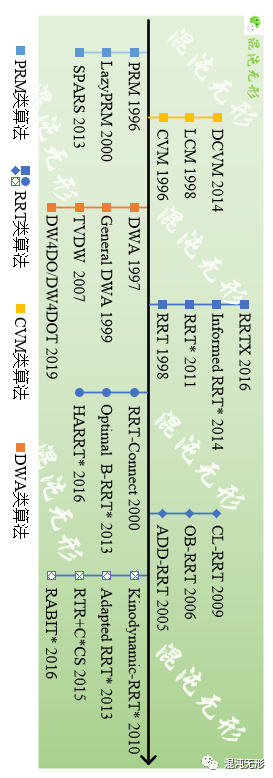
圖 2.3 空間采樣算法發(fā)展路線概況
2.3 ? 曲線插值擬合算法
上述大部分《圖規(guī)劃算法》和《空間采樣算法》生成的路徑存在折點(diǎn)、急彎等曲率不連續(xù)的情況,影響了機(jī)器人運(yùn)動平穩(wěn)性,因此需要綜合考慮模型硬約束與實(shí)際規(guī)劃軟需求,以提升路徑平滑度。
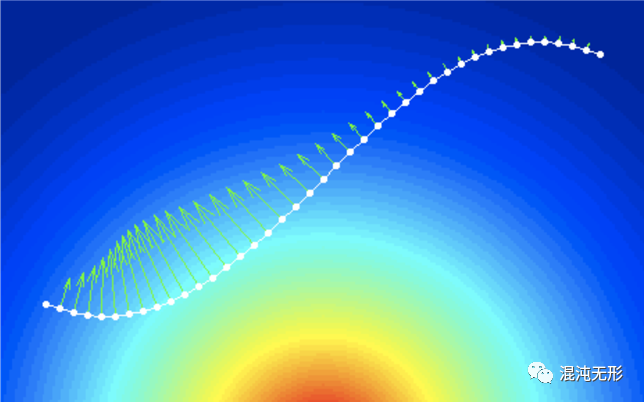
圖 2.4 CHOMP規(guī)劃算法
如圖 2.4所示,曲線插值擬合算法在曲線平滑控制及優(yōu)化方面有顯著的優(yōu)勢,按照曲線生成方式及其種類可分為:基于插值的規(guī)劃算法、基于特殊曲線的規(guī)劃算法及基于優(yōu)化的規(guī)劃算法三類,該類算法在自動駕駛等領(lǐng)域有著廣泛的應(yīng)用。?
具體相關(guān)分析可閱讀《機(jī)器人曲線插值擬合算法研究現(xiàn)狀簡述》。
2.4 ? 仿生智能算法
針對機(jī)器人運(yùn)動規(guī)劃問題,除上述基于經(jīng)典模型的規(guī)劃算法外(《圖規(guī)劃算法》、《空間采樣算法》和《曲線插值擬合算法》),還有神經(jīng)網(wǎng)絡(luò)、模糊邏輯及基于自然靈感的算法(遺傳算法、粒子群算法、蟻群算法等),并逐漸成為研究熱點(diǎn)。?
如圖 2.5所示,與經(jīng)典算法相比,智能算法能夠較好適應(yīng)復(fù)雜動態(tài)環(huán)境中的不確定、不完整的信息,但需要前期學(xué)習(xí)階段和較高計(jì)算成本,適用于大型機(jī)器人,如無人車等。?
具體相關(guān)分析可閱讀《機(jī)器人智能仿生路徑規(guī)劃算法研究現(xiàn)狀簡述》。
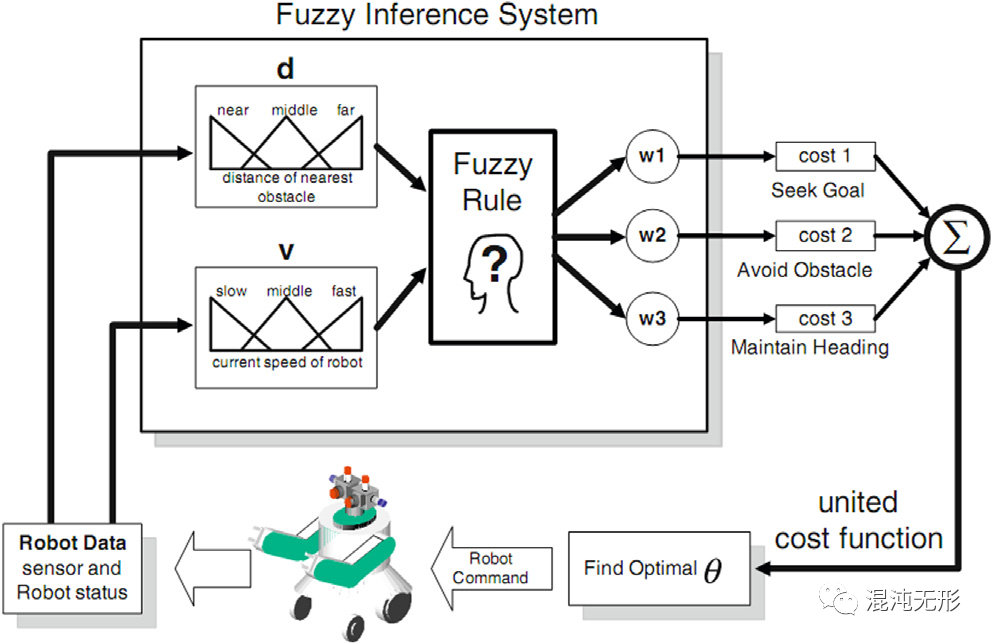
圖 2.5 路徑規(guī)劃模糊系統(tǒng)架構(gòu)
03
規(guī)劃算法特性討論 ? ?
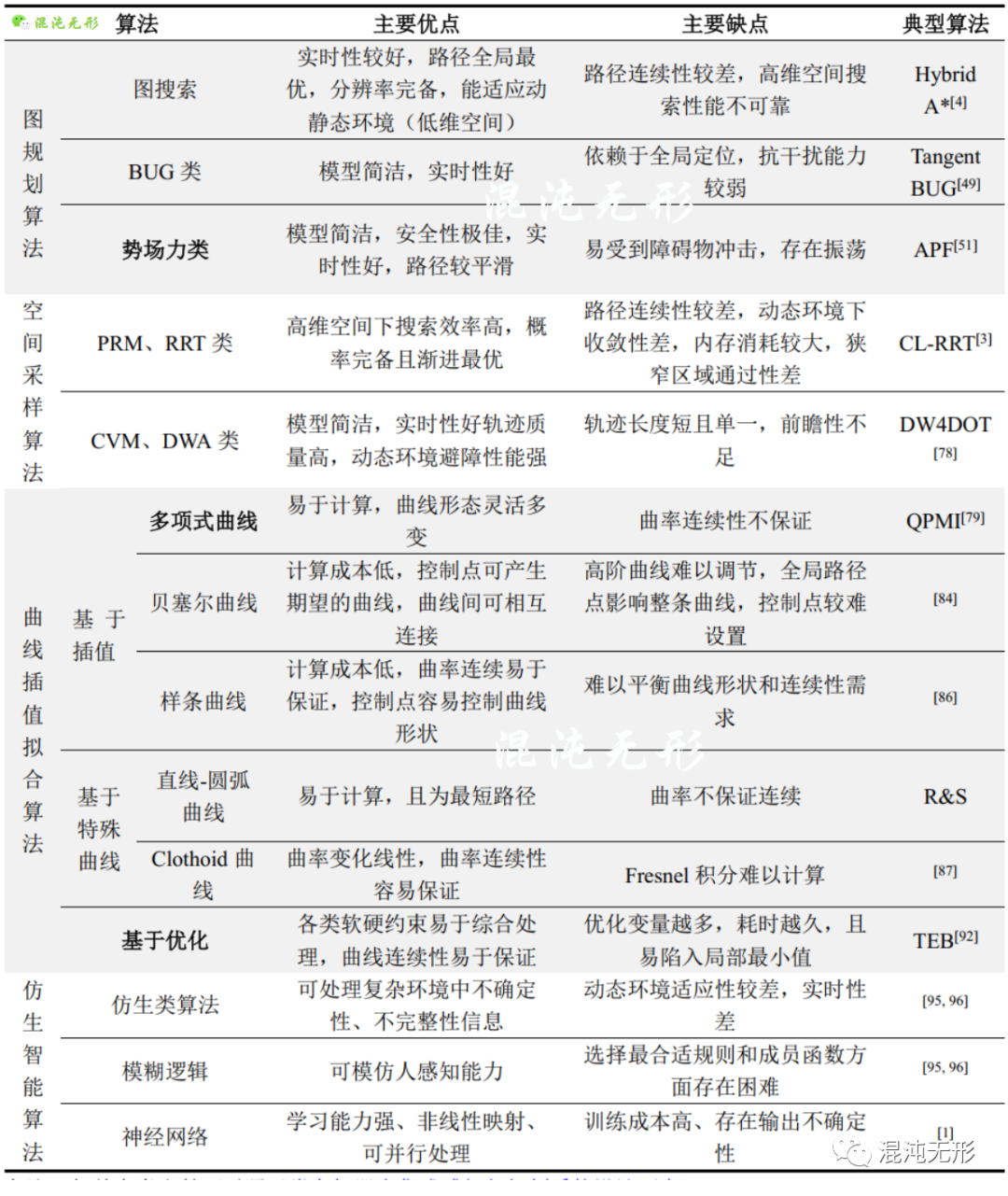
在表 3-1中,筆者總結(jié)對比了不同類型算法的主要優(yōu)缺點(diǎn),其應(yīng)用場景也存在差異。?
圖規(guī)劃算法與空間采樣算法已經(jīng)能夠在諸多場景下的規(guī)劃生成一條無碰撞路徑,實(shí)時(shí)性和動態(tài)適應(yīng)性逐漸提升,但多數(shù)算法仍存在路徑質(zhì)量差、未考慮動力學(xué)約束等問題。?
而曲線插值擬合算法正好與之配合,能夠容易生成連續(xù)性好的軌跡曲線。?
多數(shù)仿生智能算法處理動態(tài)環(huán)境下的規(guī)劃問題時(shí)存在實(shí)時(shí)性、收斂性均不穩(wěn)定等問題,實(shí)際應(yīng)用較少。?
從目前研究思路來看,多是先采用圖規(guī)劃算法、空間采樣算法生成全局路徑或初始路徑,再使用曲線插值擬合算法,綜合考慮系統(tǒng)軟硬約束,優(yōu)化生成質(zhì)量好的軌跡。
表 3 -1 運(yùn)動規(guī)劃算法優(yōu)缺點(diǎn)對比(點(diǎn)擊或原文查看大圖)
備注:相關(guān)參考文獻(xiàn)可對照《類車機(jī)器人集成感知與規(guī)劃系統(tǒng)設(shè)計(jì)研究》
04
結(jié)論與展望
本文根據(jù)規(guī)劃算法特點(diǎn)將常見規(guī)劃算法劃分為四類,并從實(shí)時(shí)性、計(jì)算成本、模型復(fù)雜度、環(huán)境適應(yīng)能力、路徑曲線質(zhì)量、軌跡長度等方面綜合對比分析了上述四個(gè)子類規(guī)劃算法。?
運(yùn)動規(guī)劃算法種類繁多,應(yīng)用場景各不相同,而本文僅從移動機(jī)器人視角對部分運(yùn)動規(guī)劃算法進(jìn)行了分析概述,只能算是窺探運(yùn)動規(guī)劃這一領(lǐng)域的冰山一角。?
后續(xù)會逐漸深入討論分析一些經(jīng)典的算法。
編輯:黃飛
?













 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論