視覺(jué)跟蹤
2017-08-10 08:28:12
。第六章主要對(duì)整個(gè)系統(tǒng)鏈路指標(biāo)進(jìn)行了分析,其中包括接受靈敏度和發(fā)射功率等,進(jìn)一步說(shuō)明了 77GHz 車載雷達(dá)系統(tǒng)的可行性,并對(duì)射頻前端電路進(jìn)行了加工和測(cè)試,為后續(xù)工作積累經(jīng)驗(yàn)。ADAS視覺(jué)方案及11家創(chuàng)業(yè)
2020-06-04 15:15:44
我司提供行人檢測(cè)/人體檢測(cè)/人體抓拍海思解決方案,同時(shí)還有ARM行人檢測(cè)攝像機(jī)方案。人體檢測(cè)自動(dòng)識(shí)別攝像機(jī)基于視頻圖像智能分析技術(shù)原理研制,采用公司自主研發(fā)的人體輪廓識(shí)別技術(shù),綜合識(shí)別人體頭部、肩部
2018-06-14 11:29:46
由于最近的項(xiàng)目遇到LabVIEW視覺(jué)檢測(cè)的。在網(wǎng)上找了很久的資料,很少。有哪位大神可以幫我看看我這LED最后處理和識(shí)別好壞。
2017-05-17 20:08:54
LabVIEW視覺(jué)檢測(cè)怎么對(duì)點(diǎn)陣的LCD屏進(jìn)行檢測(cè)如1602顯示屏。只檢測(cè)顯示的圖案缺陷,我使用匹配模式怎么差別那么大,好明顯的都檢測(cè)不出來(lái)。對(duì)于這種點(diǎn)整的LCD屏一般都使用什么方法來(lái)檢測(cè)
2017-08-22 09:13:49
MATLAB的行人目標(biāo)檢測(cè)的方法有哪些,就是主要的方法,基于背景的,基于目標(biāo)的,還有其他的。都有哪些?
2023-08-23 16:30:20
網(wǎng)上的教程都是在人臉上加個(gè)框框,進(jìn)行人臉識(shí)別,而不是進(jìn)行人臉檢測(cè)。請(qǐng)問(wèn)有誰(shuí)嘗試過(guò)和face++進(jìn)行交互,能夠識(shí)別攝像頭前的人是預(yù)存的人,嗯,類似于人臉開(kāi)密碼箱那種的。但是又想加上一部檢測(cè)到運(yùn)行拍照發(fā)郵件那個(gè)?
2020-06-10 09:28:11
項(xiàng)目名稱:車載adas應(yīng)用申請(qǐng)使用試用計(jì)劃:1.目前在做的項(xiàng)目為車載ADAS,計(jì)劃使用Hi35xx系列芯片,項(xiàng)目?jī)?nèi)容包括車輛/行人目標(biāo)檢測(cè),車道線偏離預(yù)警,碰撞預(yù)警。2.項(xiàng)目?jī)?nèi)容不要求實(shí)時(shí),用3516或3519能達(dá)到5-10幀每秒的處理速度即可
2020-11-19 20:45:45
:2022.1 bash
提示如下內(nèi)容說(shuō)明進(jìn)入鏡像成功。運(yùn)行行人跟蹤檢測(cè)app需要注意的是當(dāng)前的模型是有一定的適用條件的,一般支持RTSP視頻流,同時(shí)也支持通過(guò)文件讀取的視頻資源進(jìn)行檢測(cè),但是
2023-08-02 10:48:27
芯片上方案比較少。我們嘗試在定點(diǎn)DSP上處理人臉檢測(cè)效率低,沒(méi)有達(dá)到我們預(yù)期的目的。而TMS620C6748芯片是我們另外一個(gè)選擇。該方案需要通過(guò)視頻采集圖像,利用圖像檢測(cè)算法獲取運(yùn)動(dòng)目標(biāo),然后對(duì)運(yùn)動(dòng)目標(biāo)區(qū)域進(jìn)行人臉檢測(cè)算法識(shí)別,并對(duì)目標(biāo)進(jìn)行跟蹤。
2015-09-10 11:09:12
。此外,還應(yīng)仔細(xì)檢測(cè)加工基準(zhǔn)面位置的準(zhǔn)確度、機(jī)械加工余量分布以及壁厚偏差等。視覺(jué)尺寸檢測(cè),視覺(jué)外觀表面體積測(cè)量系統(tǒng)-機(jī)器視覺(jué)_視覺(jué)檢測(cè)設(shè)備_3D視覺(jué)_缺陷檢測(cè)二、尺寸檢測(cè)的方法產(chǎn)品的實(shí)際尺寸往往不可或缺
2021-07-08 10:02:19
跟蹤方法原理是, 固定視覺(jué)傳感器在焊槍正前方, 通過(guò)直接觀察焊槍與焊縫中心線的位置關(guān)系, 提取偏差信息, 輸出糾偏控制電壓. 由于鋁合金具有較強(qiáng)的反光性, 在熔池前端區(qū)域有一個(gè)反光區(qū), 檢測(cè)的間隙
2018-11-02 10:48:48
【作者】:謝堯芳;蘇松志;李紹滋;【來(lái)源】:《廈門(mén)大學(xué)學(xué)報(bào)(自然科學(xué)版)》2010年02期【摘要】:行人檢測(cè)是計(jì)算機(jī)視覺(jué)領(lǐng)域中的研究熱點(diǎn),其實(shí)質(zhì)是一個(gè)二分類問(wèn)題.目前基于統(tǒng)計(jì)的行人檢測(cè)技術(shù)已取得了
2010-04-24 09:48:05
如題,公司使用的開(kāi)發(fā)板是imx6q-c_v1.3,內(nèi)核是linux-3.0.35,公司領(lǐng)導(dǎo)要求在板子上實(shí)現(xiàn)攝像頭在線的行人跟蹤檢測(cè)功能,我已經(jīng)移植了opencv到開(kāi)發(fā)板上運(yùn)行,發(fā)現(xiàn)opencv自帶
2022-01-10 07:18:03
在物流搬運(yùn)行業(yè),拳頭機(jī)器人由于其獨(dú)特的并聯(lián)結(jié)構(gòu),常用于高速整列、裝箱等場(chǎng)合。其中,拳頭機(jī)器人的視覺(jué)線跟蹤技術(shù)正得到廣泛的應(yīng)用,如下圖所示:
2020-08-06 06:30:31
機(jī)器視覺(jué) --檢測(cè)圖像邊緣小程序
2015-08-23 21:35:10
高產(chǎn)量下的薄膜質(zhì)量,提出了基于機(jī)器視覺(jué)檢測(cè)技術(shù)在線薄膜缺陷自動(dòng)化檢測(cè)方法。機(jī)器視覺(jué)檢測(cè)技術(shù)的薄膜表面缺陷檢測(cè),通過(guò)建立CCD接收到的放置薄膜前后的圖像,利用同樣的圖像采集硬件和不同的軟件分析方法。為
2020-10-30 16:15:47
角點(diǎn)是圖像很重要的特征,對(duì)圖像圖形的理解和分析有很重要的作用。角點(diǎn)檢測(cè)(Corner Detection)是計(jì)算機(jī)視覺(jué)系統(tǒng)中用來(lái)獲得圖像特征的一種方法,廣泛應(yīng)用于運(yùn)動(dòng)檢測(cè)、圖像匹配、視頻跟蹤、三維
2016-01-22 13:46:00
、計(jì)算、最終進(jìn)行實(shí)際檢測(cè)、控制和應(yīng)用。產(chǎn)品的表面缺陷檢測(cè)是機(jī)器視覺(jué)檢測(cè)的一個(gè)重要部分,其檢測(cè)的準(zhǔn)確程度直接會(huì)影響產(chǎn)品最終的質(zhì)量?jī)?yōu)劣。由于使用人工檢測(cè)的方法早已不能滿足生產(chǎn)和現(xiàn)代工藝生產(chǎn)制造的需求,而利用
2016-01-20 10:29:58
為研究夜間追尾事故中本車智能防撞預(yù)警方法,本文提出了一種基于毫米波雷達(dá)和機(jī)器視覺(jué)的前方車輛檢測(cè)方法。利用多傳感器融合數(shù)據(jù),檢測(cè)前方車輛的距離、速度等。建立傳感器之間轉(zhuǎn)換關(guān)系,轉(zhuǎn)換雷達(dá)目標(biāo)的世界坐標(biāo)到圖像坐標(biāo)。
2021-06-10 10:23:08
學(xué)生接觸Labview有一定時(shí)間了,也算積累了一些小經(jīng)驗(yàn),現(xiàn)在想要用來(lái)做類似物體表面缺陷檢測(cè)這樣的機(jī)器視覺(jué)項(xiàng)目,對(duì)于Labview中的視覺(jué)模塊以及視覺(jué)助手也比較熟悉,但是到具體應(yīng)用還存在一定距離
2015-05-29 12:33:05
=339699&page=1#pid2608768現(xiàn)在移植到dsp上進(jìn)行人檢測(cè)實(shí)驗(yàn)。重新訓(xùn)練基于彩色圖像的行人檢測(cè)分類器。速度還有待優(yōu)化截圖如下:后期繼續(xù)做速度優(yōu)化。`
2014-06-27 22:44:05
在檢測(cè)道路行駛過(guò)程中的車輛或行人的存在或者行為狀態(tài)所用到的感應(yīng)器件
2019-06-08 10:33:41
重要意義。但是在行人檢測(cè)中卻由于行人兼具剛性和柔性物體的特性,外觀易受穿著、尺度、遮擋、姿態(tài)和視角等影響,使得行人檢測(cè)成為計(jì)算機(jī)視覺(jué)領(lǐng)域中一個(gè)極具挑戰(zhàn)性的課題。在日前的行人檢測(cè)方法中,駕駛系統(tǒng)中的超聲波
2018-12-12 15:24:03
Mean Shift 是一種密度梯度的無(wú)參數(shù)估計(jì)方法,應(yīng)用于目標(biāo)跟蹤領(lǐng)域有較好的性能。然而Mean Shift 算法是一種半自動(dòng)跟蹤方法。為此,提出邊緣檢測(cè)與Mean Shift 相結(jié)合的方法。利用結(jié)
2009-05-27 15:23:14 24
24 目前有很多大產(chǎn)品的配件比如橡膠圈,在裝配過(guò)程中容易脫落、漏檢導(dǎo)致產(chǎn)品不良,對(duì)公司超成一定損失。技術(shù)在不斷發(fā)展的,隨著機(jī)器視覺(jué)技術(shù)的越來(lái)越成熟,現(xiàn)在可以用2D/CCD視覺(jué)檢測(cè)系統(tǒng)對(duì)膠圈數(shù)量、2D膠圈
2023-06-05 11:39:35
指向和單脈沖跟蹤在車載動(dòng)中通中的應(yīng)用
概述:現(xiàn)階段車載“動(dòng)中通”跟蹤方式主要有慣導(dǎo)向方式和單脈沖跟蹤方式,2種跟蹤方式有各自的優(yōu)缺點(diǎn)。介紹了一
2010-04-28 16:24:0232 EVP-6100演示視頻 行人檢測(cè)系統(tǒng)
視頻教程
2010-11-18 16:21:4843 智能監(jiān)控是當(dāng)前計(jì)算機(jī)視覺(jué)領(lǐng)域中的熱點(diǎn)問(wèn)題之一。本文提出了一種運(yùn)動(dòng)檢測(cè)與視覺(jué)跟蹤相結(jié)合的智能監(jiān)控系統(tǒng),能自動(dòng)完成軌跡的初始化和終止,能夠?qū)?shù)目可變的目標(biāo)進(jìn)行自動(dòng)跟蹤
2011-09-14 15:16:12138 本文設(shè)計(jì)了一種精度高,穩(wěn)定性好的基于單目視覺(jué)的車載追尾預(yù)警系統(tǒng)。它利用一種新的邊緣檢測(cè)算法識(shí)別前方道路,然后利用陰影檢測(cè)與跟蹤相結(jié)合的方法識(shí)別前方車輛,接下來(lái)根據(jù)
2012-10-24 16:00:00 2791
2791 
利用粒子濾波實(shí)現(xiàn)行人跟蹤是視頻智能監(jiān)控的主要方法之一,但粒子濾波的粒子退化問(wèn)題尚未得到一個(gè)比較理想的解決方法。本文利用重采樣后的粒子集,構(gòu)造經(jīng)驗(yàn)分布函數(shù),用支持向
2013-08-20 16:57:020 嵌入式視覺(jué)運(yùn)動(dòng)目標(biāo)跟蹤技術(shù)研究......
2016-01-06 13:43:1718 基于機(jī)器視覺(jué)的LED芯片檢測(cè)方法
2017-02-07 18:25:2122 移動(dòng)機(jī)器人視覺(jué)導(dǎo)航中基于Hough變換的直線檢測(cè)與跟蹤_周燕紅
2017-03-19 11:45:571 基于Codebook背景建模的視頻行人檢測(cè)_黃成都
2017-03-19 11:41:390 GPS接收機(jī)設(shè)計(jì)了一個(gè)只有2 cm定位誤差的導(dǎo)航系統(tǒng),但他們并沒(méi)有考慮在一些不能使用GPS的區(qū)域,如隧道。張傳斌等人則把UKF濾波方法應(yīng)用到車載導(dǎo)航中,但UKF濾波方法計(jì)算量大,難以滿足高速公路上實(shí)時(shí)性要求很高的車載定位跟蹤系統(tǒng)。針對(duì)以上
2017-09-05 17:17:033 功能,360%范圍內(nèi)實(shí)時(shí)檢測(cè)運(yùn)動(dòng)目標(biāo)和重新定位新的目標(biāo);用PTZ 攝像機(jī)系統(tǒng)模擬中央凹視覺(jué)功能,完成局部精確注視與平滑跟蹤。給出了系統(tǒng)控制策略、運(yùn)動(dòng)檢測(cè)算法及實(shí)驗(yàn)結(jié)果。為解決視覺(jué)跟蹤中高分辨率、大視場(chǎng)和實(shí)時(shí)性三者之間的
2017-10-18 15:58:196 行人檢測(cè)如今已經(jīng)應(yīng)用到生活的多個(gè)領(lǐng)域,如智能監(jiān)控、無(wú)人駕駛和智能相機(jī)等。自hog提出行人檢測(cè)這一思想,到如今已經(jīng)有約有數(shù)千種方法。現(xiàn)有的行人檢測(cè)方法大致可以分成三大類:DPM變體、深度網(wǎng)絡(luò)和決策森林
2017-11-05 10:43:385 窗口法對(duì)整幅紅外圖像進(jìn)行遍歷,用訓(xùn)練好的SVM進(jìn)行分類檢測(cè)。在LSI Far Infrared Pedestrian Dataset數(shù)據(jù)庫(kù)上實(shí)驗(yàn)證明,基于多特征的檢測(cè)方法相較于單一特征的方法提高了紅外行人檢測(cè)的精度,降低了誤檢率和漏檢率。
2017-11-08 15:05:3614 針對(duì)如何快速而精準(zhǔn)地檢測(cè)出運(yùn)動(dòng)目標(biāo)問(wèn)題,借鑒昆蟲(chóng)復(fù)眼在視覺(jué)信息處理上的獨(dú)特技巧和原理,提出一種基于仿生視覺(jué)系統(tǒng)的運(yùn)動(dòng)目標(biāo)快速檢測(cè)方法,為確保檢測(cè)效果,利用序列圖像中目標(biāo)和背景信息在空間和時(shí)間域上
2017-11-10 11:35:246 在行人檢測(cè)中,由于外界環(huán)境復(fù)雜變化和行人自身的不同特點(diǎn),往往會(huì)造成錯(cuò)誤檢測(cè)以及遺漏檢測(cè)。針對(duì)以上問(wèn)題,文中提出一種基于圖塊和二階統(tǒng)計(jì)特征的方法,提高檢測(cè)的準(zhǔn)確率。首先利用基于圖塊的幀差法進(jìn)行前景檢測(cè)
2017-11-14 10:44:5513 對(duì)圖像和視頻中的不同類別的對(duì)象的檢測(cè)是計(jì)算機(jī)視覺(jué)研究的基本任務(wù)。行人檢測(cè)是一個(gè)熱門(mén)的研究課題。行人是交通系統(tǒng)中的主要參與者,所以對(duì)視頻監(jiān)控系統(tǒng)中的行人檢測(cè)對(duì)智能交通系統(tǒng)的研究和應(yīng)用有著重要的意義
2017-11-15 10:51:5611 檢測(cè)算法相融合,提高行人外觀特征提取的準(zhǔn)確性;然后,提出自適應(yīng)顯著特征選擇方法,有效地提取行人特征描述;最后,通過(guò)動(dòng)態(tài)加權(quán)平均排名模型將多特征融合。實(shí)驗(yàn)表明,所提出的方法提高了行人識(shí)別的準(zhǔn)確性,同時(shí)對(duì)姿態(tài)的變化具有較
2017-11-21 16:18:082 針對(duì)復(fù)雜環(huán)境中的行人檢測(cè)問(wèn)題,提出了一種有效的基于分層稀疏編碼的圖像表示方法。首先通過(guò)兩層稀疏編碼模型結(jié)合基于KSVD的深度學(xué)習(xí)算法來(lái)獲得圖像的稀疏表示,對(duì)圖像塊及同一區(qū)域的高階依賴關(guān)系進(jìn)行了建模
2017-11-24 10:24:060 針對(duì)在復(fù)雜場(chǎng)景下,聚合通道特征(ACF)的行人檢測(cè)算法存在檢測(cè)精度較低、誤檢率較高的問(wèn)題,提出一種結(jié)合紋理和輪廓特征的多通道行人檢測(cè)算法。算法由訓(xùn)練分類器和檢測(cè)兩部分組成。在訓(xùn)練階段,首先提取ACF
2017-11-27 10:25:160 疲勞駕駛研究中,面部關(guān)鍵特征精確定位與跟蹤是個(gè)難點(diǎn)。提出了一種基于主動(dòng)形狀模型ASM和膚色模型的疲勞駕駛檢測(cè)方法。首先,利用膚色模型檢測(cè)到人臉區(qū)域?yàn)锳SM提供初始定位;然后基于ASM進(jìn)行人眼和嘴巴
2017-11-28 11:31:222 出入口圖像建立背景模型,提取前景圖像對(duì)其進(jìn)行人頭檢測(cè)和跟蹤;之后,剔除行人目標(biāo)得到物件目標(biāo),對(duì)物件目標(biāo)進(jìn)行跟蹤;最后,根據(jù)行人和物件的運(yùn)動(dòng)特征進(jìn)行監(jiān)控。對(duì)12段出入口視頻序列的實(shí)驗(yàn)結(jié)果表明,監(jiān)控方法能夠準(zhǔn)確穩(wěn)定地跟蹤行人和物件,完
2017-11-28 15:03:341 針對(duì)現(xiàn)階段大部分衛(wèi)星導(dǎo)航接收機(jī)跟蹤階段的欺騙檢測(cè)方法只能檢測(cè)單欺騙源發(fā)射的欺騙信號(hào)的問(wèn)題,提出一種基于載波跟蹤環(huán)路統(tǒng)計(jì)特性分析的欺騙檢測(cè)方法。首先分析了跟蹤階段已有欺騙檢測(cè)方法的不足;其次,建立
2017-11-28 16:39:420 針對(duì)可變形部件模型(DPM)算法在行人檢測(cè)領(lǐng)域中的檢測(cè)精度高,但由于在特征提取和行人定位兩步中的計(jì)算量過(guò)大,導(dǎo)致檢測(cè)速度過(guò)慢而不能應(yīng)用于實(shí)時(shí)行人檢測(cè)的問(wèn)題,提出了一種融合分支定界算法和級(jí)聯(lián)檢測(cè)
2017-11-30 15:52:080 為了在行人檢測(cè)任務(wù)中使卷積神經(jīng)網(wǎng)絡(luò)(CNN)選擇出更優(yōu)模型并獲得定位更準(zhǔn)確的檢測(cè)框,提出一種改進(jìn)的基于卷積神經(jīng)網(wǎng)絡(luò)的行人檢測(cè)方法。改進(jìn)主要涉及兩個(gè)方面:如何決定CNN樣本迭代學(xué)習(xí)次數(shù)和如何進(jìn)行重合
2017-12-01 15:23:500 針對(duì)汽車內(nèi)飾皮革的瑕疵檢測(cè)易受皮革自身紋理干擾、檢測(cè)難度較大的問(wèn)題,發(fā)現(xiàn)瑕疵存在于均勻變化圖像中局部變化明顯的區(qū)域,符合人眼注意機(jī)制,故提出了基于視覺(jué)顯著模型的皮革瑕疵檢測(cè)方法。首先提取皮革圖像
2017-12-04 15:46:070 為了提高機(jī)動(dòng)車駕駛時(shí)的安全性,提出了基于計(jì)算機(jī)視覺(jué)的行車安全中車距估計(jì)與超車檢測(cè)方法。首先,使用車輛陰影檢測(cè)方法確定車輛位置,根據(jù)陰影位置和視覺(jué)中心點(diǎn)的距離建立車距估計(jì)函數(shù);其次,對(duì)超車情況使用背景
2017-12-07 16:39:080 針對(duì)在基于視頻的空中簽名認(rèn)證系統(tǒng)中,現(xiàn)有方法無(wú)法滿足指尖跟蹤的準(zhǔn)確性、實(shí)時(shí)性和魯棒性要求的問(wèn)題,在對(duì)比研究目前常用的多種跟蹤方法的基礎(chǔ)上,提出一種基于時(shí)間上下文的跟蹤一學(xué)習(xí)檢測(cè)(TLD)方法。在原始
2017-12-19 18:59:060 針對(duì)經(jīng)典跟蹤一學(xué)習(xí)一檢測(cè)(TLD)目標(biāo)跟蹤算法由于檢測(cè)區(qū)域過(guò)大而導(dǎo)致的檢測(cè)時(shí)間過(guò)長(zhǎng)及對(duì)相似目標(biāo)跟蹤處理效果不理想的問(wèn)題,提出一種檢測(cè)區(qū)域可動(dòng)態(tài)自適應(yīng)調(diào)整的方法-TLD-DO。該方法利用兩次
2018-01-03 16:33:180 為了解決變結(jié)構(gòu)目標(biāo)跟蹤過(guò)程中目標(biāo)失跟率較高的問(wèn)題,提出了一種基于視覺(jué)量子(vision quantum,簡(jiǎn)稱VQ)的目標(biāo)跟蹤方法.該方法首先在圖像內(nèi)自上而下地輻射視覺(jué)量子采集灰度信息,統(tǒng)計(jì)量子內(nèi)部
2018-01-08 14:59:400 攝像機(jī)運(yùn)動(dòng)情況下的運(yùn)動(dòng)目標(biāo)檢測(cè)及跟蹤是視頻監(jiān)控中的熱點(diǎn)問(wèn)題。論文提出一種基于SIFT( Sc ale Invariant Feature Transform)特征匹配的運(yùn)動(dòng)目標(biāo)檢測(cè)和跟蹤算法。在目標(biāo)
2018-01-09 16:17:461 人員進(jìn)行處理,還需要實(shí)時(shí)統(tǒng)計(jì)客流量,方便管理人員及時(shí)發(fā)揮調(diào)度作用,合理配置資源。因此,基于車載視頻監(jiān)控的乘客檢測(cè)及跟蹤方法成為計(jì)算機(jī)視覺(jué)和模式識(shí)別領(lǐng)域的研究熱點(diǎn)。本文要解決的主要問(wèn)題有:復(fù)雜環(huán)境的影響,比如
2018-01-23 15:41:091 為使舞蹈機(jī)器人根據(jù)行人的運(yùn)動(dòng)軌跡進(jìn)行路徑的動(dòng)態(tài)規(guī)劃,增強(qiáng)與人共處的能力,提出一種基于激光雷達(dá)的室內(nèi)行人跟蹤方法。獲取激光原始數(shù)據(jù)并進(jìn)行預(yù)處理,根據(jù)激光數(shù)據(jù)的分布特點(diǎn)對(duì)DBSCAN算法進(jìn)行優(yōu)化,實(shí)現(xiàn)
2018-02-05 15:33:330 為提高長(zhǎng)時(shí)目標(biāo)跟蹤的魯棒性和準(zhǔn)確性,提出一種改進(jìn)的跟蹤學(xué)習(xí)檢測(cè)( TLD)方法。利用少量具有尺度不變特性的BRISK特征點(diǎn)和均勻分布點(diǎn)組成跟蹤點(diǎn)集合代替TLD中的均勻分布跟蹤點(diǎn)。這樣不僅可以減少跟蹤
2018-02-27 13:38:312 針對(duì)非重疊視角下的行人重識(shí)別和高維特征提取等問(wèn)題,提出基于塊稀疏表示的行人重識(shí)別方法。采取典型相關(guān)分析( CCA)方法進(jìn)行特征投影變換,通過(guò)提高特征匹配能力來(lái)避免高維特征運(yùn)算引起的維數(shù)災(zāi)難問(wèn)題,并在
2018-03-29 14:57:480 目前OpenCV中的行人檢測(cè)算法支持HOG+SVM以及HOG+Cascade兩種,二者都采用了滑動(dòng)窗口技術(shù),用固定大小的窗口掃描整個(gè)圖像,然后對(duì)每一個(gè)窗口進(jìn)行前景和背景的二分類。為了檢測(cè)不同大小的行人,還需要對(duì)圖像進(jìn)行縮放。
2018-08-03 11:27:425616 行人是城市交通系統(tǒng)的主要參與者,保障行人安全和減少其對(duì)機(jī)動(dòng)車的干擾是城市交通系統(tǒng)建設(shè)的重要目標(biāo),因此對(duì)行人交通的研究也越來(lái)越受到重視。行人交通研究的主要問(wèn)題包括行人檢測(cè)、目標(biāo)跟蹤和行為分析。基于視頻
2019-07-29 08:06:002993 
近年來(lái),隨著深度學(xué)習(xí)在計(jì)算機(jī)視覺(jué)領(lǐng)域的廣泛應(yīng)用,基于深度學(xué)習(xí)的視頻運(yùn)動(dòng)目標(biāo)檢測(cè)受到廣大學(xué)者的青睞。這種方法的基本原理是利用大量目標(biāo)樣本數(shù)據(jù)訓(xùn)練一個(gè)基于深度神經(jīng)網(wǎng)絡(luò)的分類器,然后通過(guò)分類器在線檢測(cè)目標(biāo)
2018-11-19 16:01:4422 Metoak Technology展示了用于ADAS和自動(dòng)駕駛車輛的車載視覺(jué)傳感模塊,具有實(shí)時(shí)檢測(cè)車輛可行駛區(qū)域的功能。
2018-11-26 06:04:004757 行人檢測(cè)是當(dāng)前機(jī)器視覺(jué)領(lǐng)域的挑戰(zhàn)性課題之一。為了提高行人檢測(cè)效率,提出一種基于優(yōu)化圖的半監(jiān)督學(xué)習(xí)的行人檢測(cè)算法。首先,提取每幅圖像的形狀上下文特征,并采用選擇性搜索提取出行人候選區(qū)域建議框;然后
2018-12-21 17:23:065 自主駕駛礦 井機(jī)車需要實(shí)時(shí)檢測(cè)和定位行駛前方的巷道行人,激光雷達(dá)等非視覺(jué)類方法成本高昂,而傳統(tǒng)基于特征提取視覺(jué)類方法無(wú)法解決并下光照差且光線不均勻的問(wèn)題。提出一種基于深度學(xué)習(xí)的井下巷道行人視覺(jué)定位
2019-03-28 16:49:5212 針對(duì)復(fù)雜環(huán)境下行人檢測(cè)不能同時(shí)滿足高召回率與高效率檢測(cè)的問(wèn)題,提出一種基于卷積神經(jīng)網(wǎng)絡(luò)(CNN)的行人檢測(cè)方法。首先,采用CNN中的單步檢測(cè)升級(jí)版網(wǎng)絡(luò)YOL0v2 初步檢測(cè)行人;然后,設(shè)計(jì)一個(gè)網(wǎng)絡(luò)
2019-04-12 17:30:566 最近在做基于激光信息的機(jī)器人行人跟蹤發(fā)現(xiàn)如果單獨(dú)利用激光信息很難完成機(jī)器人對(duì)行人的識(shí)別、跟蹤等功能。
2019-07-08 17:04:333449 根據(jù)世界衛(wèi)生組織的最新調(diào)查,每年有大約125萬(wàn)人死于道路交通事故,其中超過(guò)一半的人數(shù)是弱勢(shì)道路使用者(行人、騎車者、摩托車手)。
2019-07-19 13:44:015892 谷歌在去年便開(kāi)始研發(fā)基于視頻的行人監(jiān)測(cè)系統(tǒng),其采用的便是深度學(xué)習(xí)算法,能在 0.25 秒內(nèi)準(zhǔn)確識(shí)別路上的行人。在谷歌負(fù)責(zé)計(jì)算機(jī)視覺(jué)和機(jī)器學(xué)習(xí)的研究科學(xué)家 Anelia Angelova 表示,「視覺(jué)信息相比雷達(dá)數(shù)據(jù),可以給車描摹一個(gè)更廣闊的視域,但是整個(gè)處理過(guò)程要慢一些。
2019-08-08 08:35:072483 行人在車輛靜止時(shí)背對(duì)著車輛向前方行走,行走到一定位置之后等候車輛起動(dòng),待車輛向前行駛一段距離后,行人繼續(xù)向前運(yùn)動(dòng),并伴有橫穿道路等動(dòng)作。從圖5 的跟蹤曲線可以看出,識(shí)別行人的外接矩形寬度變化比較顯著,這符合實(shí)際情況,由于行人行走時(shí)腿部跨度造成封閉矩形寬度變化明顯。
2019-08-09 17:29:404880 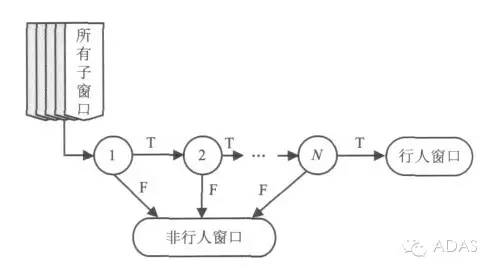
shadowCam系統(tǒng)可利用視覺(jué)感知技術(shù)來(lái)檢測(cè)車輛前方地面陰影的變化,并對(duì)其進(jìn)行分類,以判斷前方是否有隱藏的移動(dòng)車輛或行人。
2019-11-02 11:45:39980 針對(duì)復(fù)雜環(huán)境下行人檢測(cè)不能同時(shí)滿足高召回率與高效率檢測(cè)的問(wèn)題,提出一種基于卷積神經(jīng)網(wǎng)絡(luò)(CNN)的行人檢測(cè)方法。首先,采用CNN中的單步檢測(cè)升級(jí)版網(wǎng)絡(luò)YOLOv2初步檢測(cè)行人;然后,設(shè)計(jì)一個(gè)網(wǎng)絡(luò)
2019-11-05 16:15:157 行人車輛檢測(cè)在自動(dòng)駕駛、增強(qiáng)現(xiàn)實(shí)、智慧安防、智能交通等諸多領(lǐng)域都有著廣泛的應(yīng)用,近年來(lái)受到學(xué)術(shù)界和工業(yè)界越來(lái)越多的關(guān)注。針對(duì)這一問(wèn)題研究者們提出了很多有效的方法,但由于實(shí)際場(chǎng)景中經(jīng)常出現(xiàn)光照變化
2019-11-22 17:17:3010 Fynd的研究團(tuán)隊(duì)一直在訓(xùn)練一個(gè)行人檢測(cè)模型來(lái)支持我們的目標(biāo)跟蹤模型。在本文中,我們將介紹如何選擇一個(gè)模型架構(gòu),創(chuàng)建一個(gè)數(shù)據(jù)集,并為我們的特定用例進(jìn)行行人檢測(cè)模型的訓(xùn)練。 什么是目標(biāo)檢測(cè) 目標(biāo)檢測(cè)是一種計(jì)算機(jī)視覺(jué)技
2021-01-07 14:04:534144 缺陷自動(dòng)化檢測(cè)方法。機(jī)器視覺(jué)檢測(cè)技術(shù)的薄膜表面缺陷檢測(cè),通過(guò)建立ccd接收到的放置薄膜前后的圖像,利用同樣的圖像采集硬件和不同的軟件分析方法。為工業(yè)半透明薄膜生產(chǎn)提供經(jīng)濟(jì)、簡(jiǎn)易、適用的質(zhì)量評(píng)估方法。 機(jī)器視覺(jué)薄膜表面缺陷檢測(cè)
2021-02-05 14:47:031741 行人是城市交通系統(tǒng)的主要參與者,保障行人安全和減少其對(duì)機(jī)動(dòng)車的干擾是城市交通系統(tǒng)建設(shè)的重要目標(biāo),因此對(duì)行人交通的研究也越來(lái)越受到重視。行人交通研究的主要問(wèn)題包括行人檢測(cè)、目標(biāo)跟蹤和行為分析。基于視頻
2021-03-29 11:47:123717 
行人檢測(cè)是目標(biāo)檢測(cè)領(lǐng)域中重要的研究課題,其在智能駕駛系統(tǒng)、視頻監(jiān)控、人流量密度監(jiān)測(cè)等領(lǐng)域有廣泛應(yīng)用。但由于行人背景的復(fù)雜以及個(gè)體本身的差異,行人檢測(cè)成為目標(biāo)檢測(cè)領(lǐng)域的研究難點(diǎn)之一。
2021-05-02 09:55:004644 
由于可見(jiàn)光圖像和紅外圖像的成像原理不同,可見(jiàn)光圖像的行人檢測(cè)算法難以直接應(yīng)用于紅外圖像中為此,提出一種基于多級(jí)梯度特征的紅外圖像行人檢測(cè)算法。使用改進(jìn)的圖像顯著性檢測(cè)算法提取紅外圖像的關(guān)鍵區(qū)域
2021-05-27 16:27:036 利用單尺度特征映射進(jìn)行多尺度行人檢測(cè)存在準(zhǔn)確率和效率較低的問(wèn)題。為此,提出一種基于多分辨率濾波通道的多尺度檢測(cè)方法。應(yīng)用尺度感知池增強(qiáng)感受域?qū)?yīng)性,通過(guò)軟決策樹(shù)實(shí)現(xiàn)尺度不變性,在使用滑動(dòng)窗分類策略
2021-05-27 16:30:417 針對(duì)傳統(tǒng)卷積神經(jīng)網(wǎng)絡(luò)在行人檢測(cè)中卷積速度慢、抗噪弱、冗余大的問(wèn)題,提岀了一種基于深度稀疏自編碼網(wǎng)絡(luò)的方法。首先在輸入層后添加一層感興趣層,在非相鄰和相鄰特征(nor- neighboring
2021-06-11 14:53:3512 面向特種頭型微鉆的視覺(jué)檢測(cè)方法
2021-07-01 15:43:482 無(wú)錫市東富達(dá)機(jī)器視覺(jué)技術(shù)的缺陷檢測(cè)方法,即利用圖像處理和分析對(duì)產(chǎn)品可能存在的缺陷進(jìn)行檢測(cè)。 在檢測(cè)產(chǎn)品存在缺陷時(shí),其圖像表現(xiàn)為缺陷處的灰度值與標(biāo)準(zhǔn)圖像在此處的灰度值有差異。首先對(duì)瑕疵缺陷圖像的特征
2021-12-17 14:20:513911 傳統(tǒng)的檢測(cè)方法仍然依靠大量人工憑借肉眼檢測(cè),不僅影響工作效率, 而且由于工人視覺(jué)疲勞、個(gè)人評(píng)判標(biāo)準(zhǔn)等因素存在, 直接影響零件的使用壽命和性能。
2022-08-10 14:55:123136 9月7日,上汽AI LAB視覺(jué)團(tuán)隊(duì)自動(dòng)駕駛檢測(cè)跟蹤算法在國(guó)際榜單nuScenes上斬獲全球第一,將跟蹤算法關(guān)鍵指標(biāo)AMOTA(Average Multiple Object Tracking Accuracy)在現(xiàn)有最高記錄上提升3個(gè)百分點(diǎn)。
2022-09-09 16:25:471214 焊縫跟蹤器的原理 創(chuàng)想智控自主研發(fā)的視覺(jué)焊縫跟蹤器,由鏡頭、光學(xué)傳感器、中央處理器構(gòu)成,可無(wú)需外接工控機(jī),直接與機(jī)械臂控制器、PLC和其他多軸控制器相連,直接輸出運(yùn)算結(jié)果,實(shí)現(xiàn)實(shí)時(shí)跟蹤、在線檢測(cè)、自動(dòng)糾偏和異常
2022-09-19 17:06:472426 在工業(yè)生產(chǎn)中總是經(jīng)常遇到裂痕、劃痕等產(chǎn)品的表面缺陷問(wèn)題,機(jī)器視覺(jué)行業(yè)對(duì)于表面檢測(cè)相比前幾年已經(jīng)有很大的突破,對(duì)于產(chǎn)品表面的劃傷、污跡等檢測(cè)已經(jīng)不再是難點(diǎn)。
2022-10-09 16:40:051935 目標(biāo)跟蹤是計(jì)算機(jī)視覺(jué)中非常重要的任務(wù)之一。它剛好在目標(biāo)檢測(cè)之后出現(xiàn)。為了完成目標(biāo)跟蹤任務(wù),首先需要將目標(biāo)定位在一幀中。
2022-10-12 09:40:062443 機(jī)器視覺(jué)的檢測(cè)方法可以很大程度上克服人工檢測(cè)方法的抽檢率低、準(zhǔn)確性不高、實(shí)時(shí)性差、效率低、勞動(dòng)強(qiáng)度大等弊端,在現(xiàn)代工業(yè)中得到越來(lái)越廣泛的研究和應(yīng)用。
2022-12-07 11:16:472477 在先進(jìn)駕駛輔助系統(tǒng)中, 基于視覺(jué)的行人檢測(cè)只能對(duì)攝像頭視野范圍內(nèi)的無(wú)遮擋行人進(jìn)行檢測(cè), 并且易受天氣的影響, 在極端天氣下無(wú)法工作。
2023-02-22 10:17:463984 多目標(biāo)跟蹤(MOT)任務(wù)的關(guān)鍵挑戰(zhàn)是跟蹤目標(biāo)下的時(shí)間建模。現(xiàn)存的用檢測(cè)跟蹤的方法采用簡(jiǎn)單的heuristics,如空間或外觀相似性。
2023-04-18 09:12:551727 機(jī)器視覺(jué)檢測(cè)是指在圖像或視頻中識(shí)別和定位具有特定特征的目標(biāo)的過(guò)程,通常涉及目標(biāo)識(shí)別、目標(biāo)跟蹤、目標(biāo)分割等任務(wù)。它是機(jī)器視覺(jué)領(lǐng)域中最核心和最基礎(chǔ)的技術(shù)之一,具有廣泛的應(yīng)用前景。
2023-05-08 09:34:52859 數(shù)據(jù)的獲取尤為重要,是 科學(xué)的行人服務(wù)設(shè)施規(guī)劃設(shè)計(jì)和優(yōu)化配置的基礎(chǔ)。文章采用基于SSD模型行人檢測(cè)與現(xiàn)常用的基于HOG與SVM特征識(shí)別 算法比較對(duì)行人檢測(cè),并利用Kalman濾波算法對(duì)行人跟蹤,使用OpenCV3.4.7計(jì)算機(jī)視覺(jué)庫(kù)和MFC對(duì)行人監(jiān)
2023-07-20 14:45:010 在當(dāng)今制造業(yè)中,焊接技術(shù)一直扮演著至關(guān)重要的角色。為了提高焊接質(zhì)量和效率,視覺(jué)焊縫跟蹤系統(tǒng)應(yīng)運(yùn)而生。這些系統(tǒng)利用計(jì)算機(jī)視覺(jué)技術(shù),實(shí)時(shí)監(jiān)測(cè)焊接過(guò)程中的焊縫位置,從而實(shí)現(xiàn)自動(dòng)化控制和跟蹤。然而,隨著技術(shù)
2024-03-05 16:30:56934 
在焊接自動(dòng)化的推動(dòng)下,焊縫檢測(cè)技術(shù)逐漸成為焊接質(zhì)量控制的重要環(huán)節(jié)。傳統(tǒng)的焊縫檢測(cè)方法在一定程度上滿足了生產(chǎn)需求,但隨著工業(yè)應(yīng)用對(duì)精度和效率要求的提升,激光焊縫跟蹤器逐漸成為一種更具競(jìng)爭(zhēng)力的解決方案。今天一起了解激光焊縫跟蹤器與傳統(tǒng)焊縫檢測(cè)方法的對(duì)比。
2024-11-28 16:47:001006 
隨著車聯(lián)網(wǎng)技術(shù)的飛速發(fā)展,車載終端作為連接車輛與智能交通系統(tǒng)的關(guān)鍵設(shè)備,其安全性日益受到關(guān)注。為了確保車載終端在各種環(huán)境下都能穩(wěn)定運(yùn)行,且不會(huì)對(duì)車輛和乘客造成安全隱患,對(duì)其進(jìn)行全面的安全檢測(cè)顯得尤為重要。本文將深入探討車載終端安全檢測(cè)的內(nèi)容與方法。
2025-01-30 15:12:001807
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論