部署在我們的家庭、車輛、工廠、辦公樓、公共空間和智能城市基礎設施中的數十億臺物聯網設備正在推動對大規模跟蹤和定位服務的需求。在當今的物聯網連接時代,精確地確定無數事物的位置,例如智能電表,醫療
2022-09-15 19:25:34 3252
3252 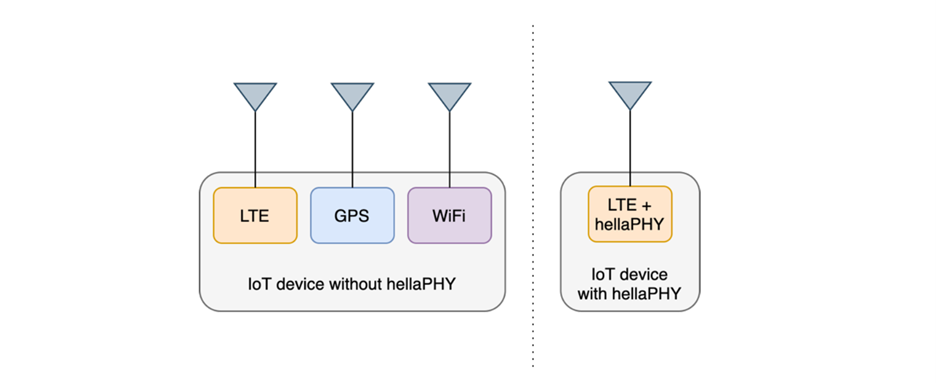
隨著藍牙低功耗技術發展到 5.2 及更高版本,其中最重要的進步之一就是定位跟蹤技術,該技術可在室內用于資產的移動和定位跟蹤。 藍牙測向方法包括無連接模式和面向連接模式,因其具有的這種多功能性,該技術
2025-02-26 16:12:03802 
有什么想法,為什么在StythIn.c中的SNTP中,TycPIPStaskSimuleEngultObjultTBL為什么不創建一個配置?堆棧無法從SNTP開始,到目前為止,我已經將它跟蹤到這一點
2020-04-09 07:18:12
目的操作數;將棧頂操作數恢復到指定位置
PUSHF;標志寄存器內容入棧保護
POPF ;標志寄存器出棧恢復
2025-11-21 06:49:16
GPS導航定位位置跟蹤技術末來發展趨勢淺析縱觀GPS導航技術在國內市場的發展,我們從中不難發現其用于汽車中的無線技術共存趨勢帶來的無限可能,也同時給我們無限想象的空間。而具體的就表現在PND正在向
2009-10-20 09:39:48
,在創建任務時,Frror將任務堆棧的空間從自己的堆中定位。(我很確定這一點,因為堆棧大小是動態地提供給任務創建函數的)。這是否意味著我可以避開一個非常小的PSoC Creator堆棧大小,因為這個堆棧
2019-03-22 07:43:38
區分配地址方式;如下圖所示設置,Scatter file選擇第一步設置好的.sct文件; 第四步:查看生成的.map文件如下圖所示,表示起始的堆棧地址已設置到RAM頂端 第五步:測試驗證;如下圖所示
2016-12-07 14:14:59
使用codewarrior如何查看芯片的堆棧使用情況
2023-10-23 06:30:40
要通過什么方法來獲取當前任務的堆棧大小
2023-10-12 08:01:42
rtthread編譯后如何查看堆棧空間使用情況,現在只能在編譯完成后看到總大小,有沒有辦法能看到詳細的使用情況。
由于RAM只有128K,除去內存池32k,想看看剩余的RAM在哪用了
2024-03-05 07:58:49
uwb定位管理系統是一種能夠在復雜工業環境中實現高精度的定位技術,并且系統具有很好的穩定性。系統利用通訊網絡作為主傳輸平臺,錨點、定位標簽等設備與系統掛接,通過三維可視化平臺進行大屏實時顯示
2021-09-08 17:19:22
申請理由:1. 驗證人臉識別算法運行效率2. 驗證視頻采集、顯示功能項目描述:在視頻會議系統中,隨時跟蹤發言人的位置,并控制攝像頭/麥克風對準發言人方向。需要驗證人臉識別算法、跟蹤定位算法在系統上的運行效率;
2015-10-21 09:22:39
可達到亞像素精度,具有一定的實際應用價值。主要研究內容:⑴ 目標定位的方位及精度⑵ 圖像處理的過程,包括閾值選取,圖像分割算法選擇,中心點的獲取;⑶ 目標的實時跟蹤;⑷ 誤差產生的原因和減小誤差的方法
2017-04-27 14:18:11
員(識別對象)進行任何行為規范與約束的情況下,完成對該對象或者該群對象以及攜帶物品的自動識別與跟蹤,從而達成管理的目的。當然,考慮到被識別對象的隱私權等問題,這種自由跟蹤與識別是善意的,并被告知系統
2011-04-14 16:03:12
人臉檢測跟蹤與特征點定位系統
2012-08-06 13:07:16
的快速定位方式中。選擇減速規律時,不僅要考慮平穩性,更重要的是考慮到停止時的定位精度。從理論上講,只要減速點選得正確,指數規律和線性規律的減速都可以精確定位,但難點是減速點的確定。通常減速點的確定方法有
2023-03-08 09:37:19
WIFI定位標簽安裝在要跟蹤的目標物體(資產或人員)上,定位標簽周期性地發出無線信號,接入點(AP)接收到信號后,將信號傳送給定位引擎EPE,EPE根據收到的無線信號的強弱,計算判斷出該標簽所處位置,并通過 EkahauVision可視化界面,顯示其具體位置,實現實時精確定位跟蹤與管理。
2019-09-20 06:41:38
衛星定位接收機載波跟蹤的設計與實現 介紹了衛星定位接收機載波跟蹤部分的設計和實現。在對比分析了載波頻率跟蹤(FLL)和載波相位跟蹤(PLL)各自優點的基礎上,提出一種易于通過
2009-09-19 09:38:40
1、修改啟動文件:
方法說明:棧大小通常在啟動文件中定義。可以通過直接修改這個文件中的Stack_Size變量來調整棧大小。
操作步驟:找到對應的啟動文件,定位到Stack_Size的定義處,修改
2025-11-14 06:32:25
相信很多博友在調試ARM代碼的時候,尤其是涉及到操作底層的時候,由于一些誤操作常常會遇到Hard fault錯誤或者程序跑飛的情況,這些bug采用正常的方法是比較難定位的,往往需要我們逐行去排查測試
2015-01-21 13:45:18
UWB信號,在標簽定位距離內的所有基站都會收到無線信號,如果有兩個已知坐標點的基站收到信號,標簽和基站的距離間隔不同,因此這兩個收到信號的時間節點是不一樣的,根據數學關系,到已知兩點為常數的點,一定處于
2019-10-25 17:24:07
如何使用探頭定位近場EMI故障點?
2021-05-08 08:12:40
的64位Linux下總是崩潰,估計堆棧、內存被破壞,用Valgrind沒辦法定位到具體的出錯位置。經過多次用最原始的printf()跟蹤,發現和md5加密函數有關,篩查了代碼死活也沒發現錯誤。如此折騰了...
2021-11-05 08:12:58
本章討論將TCP/IP堆棧移植到新環境。
假設堆棧正在被移植到一個帶有網絡接口的小型嵌入式系統,并且ADS 1.0可用。
本章包含以下各節:
2023-08-18 08:17:02
、通過Tools > Options > Stack > Enable graphical stack display and stack usage tracking使能堆棧跟蹤
2020-01-03 16:45:08
CubeIDE有什么查看調用棧內容的能力?,即崩潰前調用了哪些函數,最好以樹的形式,請提供建議,如何使用 STM32Cubeide 查看函數調用樹和 MCU 堆棧的內容。
2022-12-20 06:55:20
有沒有人懂定位跟蹤器的設計及原理,想自己做,跪求大神,大佬求帶。
2019-09-28 09:09:22
的跟蹤。適合于空對地和地對地場景。這個算法跟蹤場景中的多個目標,然后依據每個點的運動,從而估計整個場景全局運動,場景中的目標和定位是自動選擇的。當存在跟蹤點移動到攝像機視場外時,新的跟蹤點能自動被標識
2013-09-29 08:59:37
請問keil因堆棧不足導致的申請內存失敗應該怎么解決?
2022-02-23 06:57:30
基于雙DSP的運動目標智能跟蹤系統是怎樣設計并實現的?
2021-04-27 06:59:18
針對視頻運動參數捕獲系統中標記點無法被正確匹配及跟蹤的問題,提出一種多目標三維立體跟蹤算法。該算法通過二維和三維卡爾曼濾波預測來標記點的位置,并利用三維立體匹
2009-04-08 09:00:55 21
21 基于射頻通訊的井下人員跟蹤定位系統是依靠井下現有網絡實現了無線與有線通訊相結合的簡單高效的人員跟蹤與定位。可實現井下人員的定位與跟蹤、生產調度指揮的直觀化、考
2009-04-11 10:39:1519 中圖儀器GTS坐標跟蹤定位測量儀將干涉測長的及時修正速度與絕對測距功能相結合,保證測量精度,并實現擋光恢復。在斷光時會在小范圍內自動搜索到目標球,完成斷光續接,自動鎖定目標球,全過程不需人為操作
2023-02-17 14:47:44
蜂窩網無線定位技術中,非視距(NLOS)誤差的存在使得蜂窩網無線定位技術的定位精度急劇下降。針對NLOS 環境,對基于卡夫曼濾波的動態跟蹤定位算法進行了改進。首先引入判
2010-01-15 14:11:418 在視線跟蹤過程中,變形瞳孔的定位至關重要。針對眼部圖像出現干擾情況下的變形瞳孔定位,該文提出了一種基于3 點的隨機采樣一致性定位算法RANSAC_3,即利用隨機采樣到的2 點(
2010-02-09 11:40:5727 中圖儀器GTS國產光學跟蹤定位儀是高精度、便攜式的空間大尺寸坐標測量機,是同時具高精度(μm級)、大工作空間(百米級)的高性能光電測量儀器。能夠解決大型、超大型工件和大型科學裝置、工業母機等全域
2024-03-11 11:17:11
針對人員定位跟蹤系統數據相關性大的特點,文章提出了一種基于DLL 的人員定位跟蹤系統數據處理模塊的設計方案,介紹了人員定位跟蹤系統的組成,闡述了數據處理模塊的處理內容,
2010-11-06 10:52:3228
關鍵字:跟蹤器,定位器,手機定位,CDMA定位,GPS定位跟蹤器,GPSNOE定位追蹤器,衛星定位追蹤器,最
2008-01-21 17:03:554941 GTS中圖激光跟蹤定位儀主要用于百米大尺度空間三維坐標的精密測量,集激光干涉測距技術、光電檢測技術、精密機械技術、計算機及控制技術、現代數值計算理論于一體,在大尺度空間測量工業科學儀器中具有高精度
2025-01-10 15:32:33
中圖儀器GTS空間定位跟蹤測量儀是同時具高精度(μm級)、大工作空間(百米級)的高性能光電測量儀器,在飛機、汽車、船舶、航天、機器人、核電、軌道交通裝備制造行業以及大型科學工程、工業母機的高精密加工
2025-02-11 13:53:07
GTS動態目標跟蹤定位儀用于百米大尺度空間三維坐標的精密測量,在飛機、汽車、船舶、航天、機器人、核電、軌道交通裝備制造行業以及大型科學工程、工業母機的高精密加工和裝配中,能夠解決大型、超大型工件
2025-02-17 16:17:58
GTS激光坐標跟蹤定位儀用于百米大尺度空間三維坐標的精密測量,集激光干涉測距技術、光電檢測技術、精密機械技術、計算機及控制技術、現代數值計算理論于一體,在大尺度空間測量工業科學儀器中具有高精度
2025-03-03 14:54:53
中圖儀器GTS激光實時定位跟蹤測量儀主要用于百米大尺度空間三維坐標的精密測量,在大尺度空間測量工業科學儀器中具有高的精度和重要性,是同時具有μm級別精度、百米工作空間的高性能光電儀器。GTS激光實時
2025-04-18 14:22:37
中圖儀器GTS系列6D實時定位激光跟蹤儀廣泛應用在飛機、汽車、船舶、航天、機器人、核電、軌道交通裝備制造行業以及大型科學工程、工業母機的高精密加工和裝配中,能夠解決大型、超大型工件和大型科學裝置
2025-04-22 14:17:04
中圖儀器GTS坐標定位激光跟蹤儀可以準確測量機器人末端在一系列預定義關節角度下的實際位姿,RobotMaster軟件將測量數據與內部通過DH模型轉換得到的理論值進行計算。根據計算所得偏差,通過軟件
2025-04-25 15:58:22
GTS激光坐標定位跟蹤測量系統用于百米大尺度空間三維坐標的精密測量,集激光干涉測距技術、光電檢測技術、精密機械技術、計算機及控制技術、現代數值計算理論于一體,可用于尺寸測量、安裝、定位、校正和逆向
2025-05-06 11:41:25
GTS國產激光跟蹤定位儀可以和多種形式的合作目標測頭配合使用,能夠解決大型、超大型工件和大型科學裝置、工業母機等全域高精度空間坐標和空間姿態的測量問題,廣泛應用在飛機、汽車、船舶、航天、機器人、核電
2025-05-21 14:35:14
GTS姿態位置激光跟蹤定位儀集激光干涉測距技術、光電檢測技術、精密機械技術、計算機及控制技術、現代數值計算理論于一體,可用于尺寸測量、安裝、定位、校正和逆向工程等應用。 GTS姿態位置激光
2025-05-29 14:51:19
GTS空間定位激光跟蹤測量儀用于百米大尺度空間三維坐標的精密測量,集激光干涉測距技術、光電檢測技術、精密機械技術、計算機及控制技術、現代數值計算理論于一體,可用于尺寸測量、安裝、定位、校正和逆向工程
2025-05-30 10:56:02
中圖儀器GTS系列坐標激光跟蹤定位測量儀是高精度、便攜式的空間大尺寸坐標測量機,是同時具高精度(μm級)、大工作空間(百米級)的高性能光電測量儀器,集激光干涉測距技術、光電檢測技術、精密機械技術
2025-06-12 13:35:00
GTS激光跟蹤定位測量儀集激光干涉測距技術、光電檢測技術、精密機械技術、計算機及控制技術、現代數值計算理論于一體,是高精度、便攜式的空間大尺寸坐標測量機,是同時具高精度(μm級)、大工作空間(百米級
2025-06-13 11:38:25
中圖儀器GTS系列6D定位激光跟蹤儀是高精度、便攜式的空間大尺寸坐標測量機,是同時具高精度(μm級)、大工作空間(百米級)的高性能光電測量儀器,可以和多種形式的合作目標測頭配合使用,能夠解決大型
2025-06-27 11:39:41
GTS定位精度激光跟蹤檢測儀集激光干涉測距技術、光電檢測技術、精密機械技術、計算機及控制技術、現代數值計算理論于一體,是高精度、便攜式的空間大尺寸坐標測量機,是同時具高精度(μm級)、大工作空間
2025-07-03 10:55:14
GTS激光跟蹤空間點大尺寸測量儀用于百米大尺度空間三維坐標的精密測量,集激光干涉測距技術、光電檢測技術、精密機械技術、計算機及控制技術、現代數值計算理論于一體,可用于尺寸測量、安裝、定位、校正和逆向
2025-07-10 13:39:42
GTS高精度激光跟蹤定位儀集激光干涉測距技術、光電檢測技術、精密機械技術、計算機及控制技術、現代數值計算理論于一體,是高精度、便攜式的空間大尺寸坐標測量機,是同時具高精度(μm級)、大工作空間(百米
2025-08-04 13:45:12
GTS運動姿態激光跟蹤定位儀集激光干涉測距技術、光電檢測技術、精密機械技術、計算機及控制技術、現代數值計算理論于一體,是高精度、便攜式的空間大尺寸坐標測量機,是同時具高精度(μm級)、大工作空間
2025-08-12 15:44:13
GTS精密激光跟蹤定位儀是建立在激光和自動控制技術基礎上的一種高精度三維測量系統,主要用于大尺寸空間坐標測量領域。它集中了激光干涉測距、角度測量等技術,基于球坐標法測量原理,通過測角、測距實現三維
2025-08-19 14:27:16
GTS激光跟蹤定位檢測儀是建立在激光和自動控制技術基礎上的一種高精度三維測量系統,主要用于大尺寸空間坐標測量領域。它集中了激光干涉測距、角度測量等技術,基于球坐標法測量原理,通過測角、測距實現三維
2025-09-12 17:02:42
為了實現快速穩定無偏定位跟蹤,提出了一種新的雙站純角度快速漸進無偏定位跟蹤算法。該算法通過對未知狀態變量含二次約束的偽線性方程進行約束最小二乘(CLS)極小化處理,最
2011-10-08 15:33:1830 對于藍牙的物體定位跟蹤實現過程新穎的見解,及物聯網里信號的識別。
2015-11-09 16:52:412 針對當前車載跟蹤定位的迫切需求,設計了移動汽車跟蹤定位智能系統,開發了移動汽車硬件監控平臺,采用VC++與GIS結合技術作為開發工具,使用硬件支撐的方法實施GPS模塊定位和校對,借助于濾波GPS
2017-10-31 15:48:280 堆棧指針總是指向棧頂位置。一般堆棧的棧底不能動,所以數據入棧前要先修改堆棧指針,使它指向新的空余空間然后再把數據存進去,出棧的時候相反。堆棧指針,隨時跟蹤棧頂地址,按“先進后出”的原則存取數據。
2017-11-10 11:01:0710968 堆棧是一塊保存數據的連續內存。一個名為堆棧指針(SP)的寄存器指向堆棧的頂部。 堆棧的底部在一個固定的地址。堆棧的大小在運行時由內核動態地調整。 CPU實現指令 PUSH和POP,向堆棧中添加
2017-11-13 09:04:0735071 
堆棧指針總是指向棧頂位置。一般堆棧的棧底不能動,所以數據入棧前要先修改堆棧指針,使它指向新的空余空間然后再把數據存進去,出棧的時候相反。堆棧指針,隨時跟蹤棧頂地址,按“先進后出”的原則存取數據。
2017-11-13 09:40:1714646 
為了在降低資源能耗和帶寬占用情況下,提高無線傳感器網絡WSNs移動目標定位跟蹤的精度,提出了基于KullbackLeibler分歧的變分濾波的WSNs貝葉斯移動目標定位跟蹤算法。首先,利用高斯
2017-11-17 14:57:202 針對傳統三維掃描測量機器人依賴于機器人的定位精度從而難以實現高精度測量的問題,提出了一種三維掃描測頭精確跟蹤定位的攝影測量方法。首先,搭建由多個工業攝像機構成的測頭跟蹤系統,并在機器人的掃描測頭上
2017-11-30 17:09:013 GPS跟蹤器是內置了GPS模塊和移動通信模塊的終端,用于將GPS模塊獲得的定位數據通過移動通信模塊(gsm/gprs網絡)傳至Internet上的一臺服務器上,從而可以實現在電腦上查詢終端位置。
2018-01-19 10:30:4038861 拖拉機定位跟蹤GPS是由定位系統(GPS)、聯通無線數據傳輸公網、拖拉機的車載終端、遠程監控設備、調度智能控制等五大部分組成。拖拉機跟蹤定位裝置是由單片機和GSM(全球移動通信系統)通訊模塊及外接
2018-01-22 16:00:410 理論和現實意義[1-2]。本文將白光LED作為點光源,利用LM3S811單片機作為核心控制器,設計并實現了一個點光源自動跟蹤系統.
2018-04-12 14:46:3511 本系統以TI公司的超低功耗 M C U M SP430處理器為核心,C PU (M SP430)根據光敏電阻所反應的不同電壓值經相應程序對兩個步進電機進行控制,進而由步進電機帶動激光筆進行左右和上下精確定位,實現對光源的跟蹤并對檢測電壓進行實時顯示。
2018-04-25 17:29:0125 聯網專用網絡通信的一套資產保全系統,具有低功耗,雙模定位等特點,工作時長2~3年。專門為法院、銀行、保險公司等設計,法院查封財產的監測跟蹤,家庭、店鋪的防盜監測,保險柜等重要物品,人員考勤巡更定位跟蹤
2018-07-05 14:25:294494 據外媒報道,近日一位前諾基亞工程師跟我們分享了他認為微軟Windows Phone消亡失敗的最主要4點原因。
2019-07-29 14:32:154082 本文提出了一種基于51單片機的室內目標定位并反饋指導電機控制的方案。采用紅外線觸發,超聲波測距,三點定位技術,使用51單片機結合L298N電機驅動芯片來控制步進電機和單相直流電機,實現了電風扇自動跟蹤目標和自動調速的功能。
2019-08-20 17:03:5917 圖像跟蹤系統采用特有的NCAST目標外形特征檢測方法,被跟蹤者無需任何輔助設備,只要進入跟蹤區域,系統便可對目標進行鎖定跟蹤,使攝像機畫面以鎖定的目標為中心,并控制攝像機進行相應策略的縮放。
2019-10-12 15:25:412152 linux命令 — lsof 查看進程打開那些文件 或者 查看文件給那個進程使用對調試文件有很好的幫助和精準定位問題
2019-10-28 08:00:000 PST光學定位(光學跟蹤)使用實際物體進行3D交互和3D測量(即追蹤目標物),無需連線。 追蹤目標是可以被PST光學定位儀(光學跟蹤/光學追蹤)識別并確定3D位置和方向的物理對象。 正如使用鼠標
2020-03-16 14:22:322578 PST光學定位(光學跟蹤)使用實際物體進行3D交互和3D測量(即追蹤目標物),無需連線。 追蹤目標是可以被PST光學定位儀(光學跟蹤/光學追蹤)識別并確定3D位置和方向的物理對象。 正如使用鼠標
2020-05-27 09:04:192063 設置基準定位點時,通常在定位點的周圍留出比其大1.5mm的無阻焊區,不能有相似的焊盤或者別的類似的。
2020-06-29 09:53:054778 本文檔的主要內容詳細介紹的是點位圖查看軟件BoardViewer免費下載。
2020-07-13 08:00:0075 用于分布式負載點應用的簡單電源跟蹤
2021-03-21 00:52:007 STM32 FLASH寫入失敗問題定位STM32F407 仿真過程進行FLASH寫入的時候報錯:FLASH_ERROR_PROGRAM (0x00000006)STM32F407 仿真過程進行
2021-12-01 20:36:1420 STM32F407與STM32F105的CAN通訊失敗問題,經過一系列的測試分析,發現并解決問題,實現正常的CAN通訊。問題的現象STM32F407 板上安裝25MHz晶體,作為HSE時鐘,內部配置到...
2021-12-02 16:51:1618 程序莫名卡死等現象。??在確保程序語法無誤,沒有堆棧溢出的操作后,我們應該檢查分配給程序的堆棧空間是否足夠,因為keil工程在運行中可使用的最大堆棧空間是事先分配好的。??編譯后在編譯輸出窗口可看到程序
2021-12-31 19:25:1310 步驟 1 中心交換機上查看遠端模塊的相關告警,是否有與遠端模塊升級失敗相關的告警。
2022-05-24 17:28:272973 我們經常會討論這樣的問題:什么時候數據存儲在堆棧(Stack)中,什么時候數據存儲在堆(Heap)中。我們知道,局部變量是存儲在堆棧中的;debug時,查看堆棧可以知道函數的調用順序;函數調用時傳遞
2022-07-29 09:09:481881 在產品散熱設計時需要查看風扇的工作點是否合理,FLOEFD在計算完成之后,可以直接查看風扇工作狀態點。
2023-03-20 09:20:342820 GPS定位器的用途廣泛,可用于兒童老人或寵物的 行蹤掌控 、貴重貨物跟蹤、 個人財物跟蹤 、 物流貨運業 、 汽車防盜 、 電摩防盜 , 銀行運鈔車 、公務車管理、金融車貸風控管理等。那在購買上我們需要避免哪些誤區呢?
2023-03-21 16:32:172208 電子發燒友網站提供《基于BLE和LoRa的室內定位跟蹤器.zip》資料免費下載
2023-06-27 10:20:130 工牌,最初的的作用是在企業里可以方便區分人員屬性(姓名,職位等)。我們知道藍牙定位技術在不同領域中有著廣泛的應用,包括高精度定位和實時跟蹤。這些技術通常使用藍牙信標、藍牙標簽或其他藍牙設備來實現
2023-09-08 16:10:241495 電子發燒友網站提供《基于GPS/GPRS技術的車輛定位控制跟蹤終端設計.pdf》資料免費下載
2023-10-25 10:57:020 傳統意義上的圖像跟蹤主要分為兩種,一種是通過在一定載體上安裝定位設備并結合無線傳輸設備對載體的實時位置進行定位或描繪出移動軌跡,這種跟蹤設備主要用于消防、戶外探險等領域。另一種跟蹤設備主要是指圖像
2024-02-20 08:28:291059 
本文主要聊聊關于堆棧的內容。包括堆棧和內存的基本知識。常見和堆棧相關的 bug,如棧溢出,內存泄漏,堆內存分配失敗等。后面介紹軟件中堆棧統計的重要性,以及如何使用工具工具軟件中堆棧使用的范圍,并給出在軟件開發中,如何降低堆棧問題,優化堆棧的一些實踐。
2024-08-29 14:10:091471 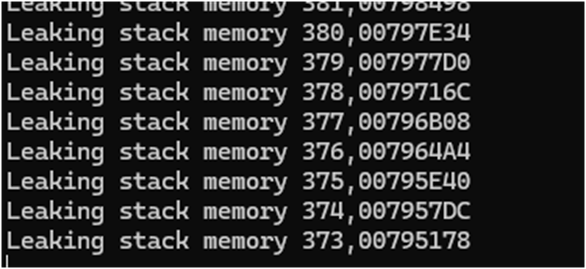
歷史上,大多數基于傳感器的定位跟蹤系統一直受到從傳感器漂移到磁干擾和可靠性的問題的困擾,為了提供精確的位置數據,現代基于傳感器的跟蹤系統必須克服這些問題,同時提供一個高精度、低功耗的傳感器模塊
2024-09-12 08:11:321066 
隨著藍牙低功耗(BluetoothLow Energy,簡稱BLE)技術發展到5.2及更高版本,其中最重要的進步之一就是定位跟蹤技術,該技術可在室內用于資產的移動和定位跟蹤。
2024-11-14 09:39:061193 
 電子發燒友App
電子發燒友App










 工商網監
工商網監
評論