") 圖像跟蹤設(shè)備發(fā)展歷史
圖像跟蹤設(shè)備發(fā)展歷史

傳統(tǒng)意義上的圖像跟蹤主要分為兩種,一種是通過在一定載體上安裝定位設(shè)備并結(jié)合無線傳輸設(shè)備對載體的實時位置進行定位或描繪出移動軌跡,這種跟蹤設(shè)備主要用于消防、戶外探險等領(lǐng)域。
另一種跟蹤設(shè)備主要是指圖像跟蹤板,根據(jù)技術(shù)發(fā)展的過程,有基于DSP的圖像跟蹤板和基于AI芯片的圖像跟蹤板兩種,其原理是通過提前在圖像跟蹤板中裝入目標(biāo)圖像,跟蹤板在視場內(nèi)尋找類似的目標(biāo)實時檢測,找到之后進行實時跟蹤。
隨著AI芯片的大規(guī)模應(yīng)用,以及市場對跟蹤板性能要求的提升,傳統(tǒng)的基于DSP的圖像跟蹤器已經(jīng)難以達到應(yīng)用的要求,很多總體單位對跟蹤器提出了智能學(xué)習(xí)、多目標(biāo)檢測、自動打擊、更高的識別率等要求,基于AI的跟蹤器得到了越來越廣泛的應(yīng)用,例如各種空中偵查設(shè)備、抓捕設(shè)備、智能邊海防設(shè)備、船用光電設(shè)備、智能化彈藥等都需要各種各樣的智能圖像跟蹤器進行匹配。
隨著智能跟蹤器的需求量越來越大,對技術(shù)的要求越來越高,市場上出現(xiàn)了專業(yè)的圖像跟蹤板研發(fā)生產(chǎn)廠家,成都慧視就是其中之一。
而且為了快速提升跟蹤的識別率、快速升級迭代,也出現(xiàn)了專業(yè)的工具,例如百度的AI訓(xùn)練工具,類似的還有成都慧視光電技術(shù)有限公司的SpeedDP深度學(xué)習(xí)算法開發(fā)平臺。
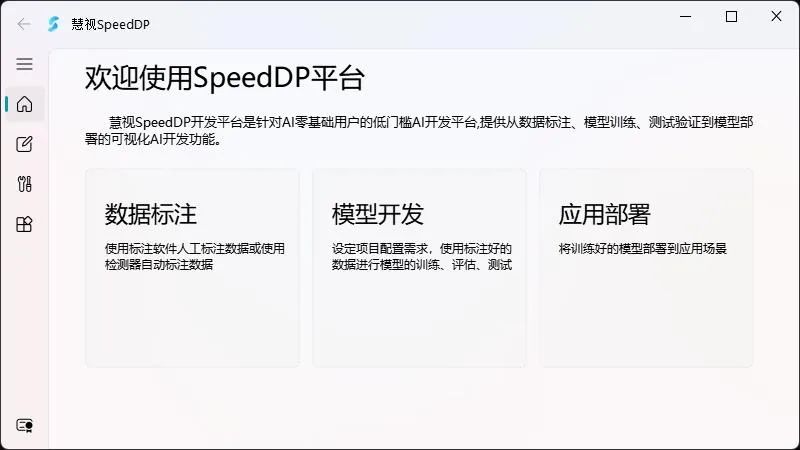
該平臺提供豐富的算法參數(shù)設(shè)置接口,滿足不同用戶業(yè)務(wù)場景的定制化需求。此外,慧視光電SpeedDP深度學(xué)習(xí)算法開發(fā)平臺支持本地化服務(wù)器部署,數(shù)據(jù)敏感或?qū)?shù)據(jù)有保密需求的用戶再也無需擔(dān)心數(shù)據(jù)信息泄露的問題。
目前慧視光電SpeedDP深度學(xué)習(xí)算法開發(fā)平臺主要提供目標(biāo)檢測算法的開發(fā)功能,不同的用戶可針對自己的業(yè)務(wù)場景進行AI算法的定制化開發(fā)以及算法模型的快速迭代優(yōu)化。
隨著芯片性能的提升,跟蹤器的發(fā)展趨勢是生成式人工智能也會在圖像跟蹤板上得到應(yīng)用,使得識別率達到極大的提升,相關(guān)配套的整體設(shè)備性能也會得到質(zhì)的提升。
-
dsp
+關(guān)注
關(guān)注
561文章
8244瀏覽量
366614 -
圖像
+關(guān)注
關(guān)注
2文章
1096瀏覽量
42326 -
AI芯片
+關(guān)注
關(guān)注
17文章
2126瀏覽量
36771
發(fā)布評論請先 登錄
在 VisionFive 2 上使用線跟蹤器
深入解析 LTC2923:電源跟蹤與排序的理想解決方案
圖像采集卡:連接設(shè)備與數(shù)據(jù)的圖像樞紐

數(shù)字圖像采集的核心載體——圖像采集卡技術(shù)白皮書
ICM-45686:高性能6軸MEMS運動跟蹤設(shè)備的深度解析
TDK IIM - 42653:高性能工業(yè)級6軸運動跟蹤MEMS設(shè)備解析
IAM-20680HV:高性能汽車6軸運動跟蹤設(shè)備解析
基于FD-SST 的無人機目標(biāo)跟蹤系統(tǒng)的設(shè)計與實現(xiàn)|技術(shù)集結(jié)

Shell歷史命令history用法
石英晶振的發(fā)展歷史

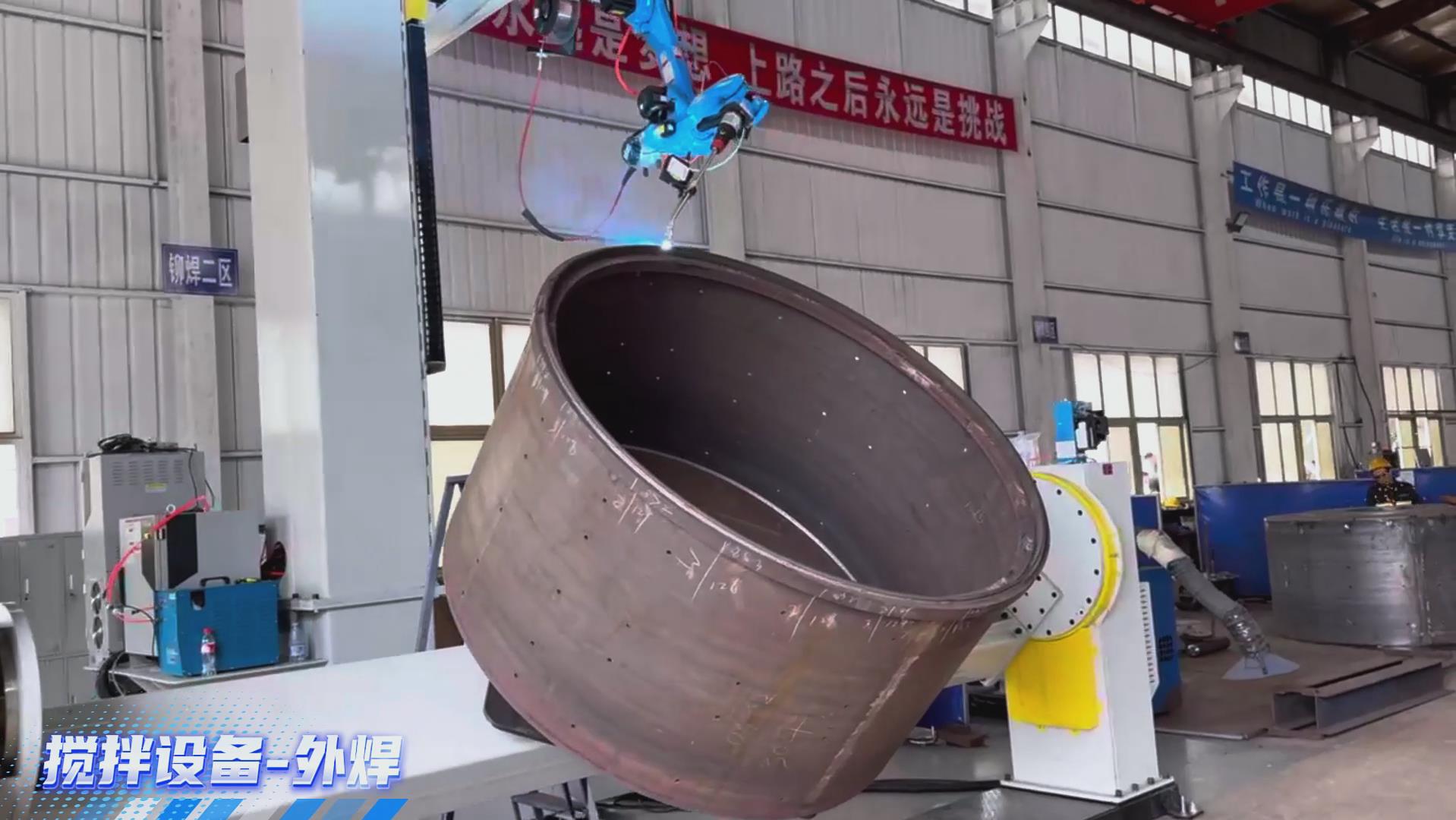
卡諾普機器人搭載創(chuàng)想焊縫跟蹤系統(tǒng),實現(xiàn)攪拌設(shè)備焊接智能化升級
無法使用OpenVINO?在 GPU 設(shè)備上運行穩(wěn)定擴散文本到圖像的原因?
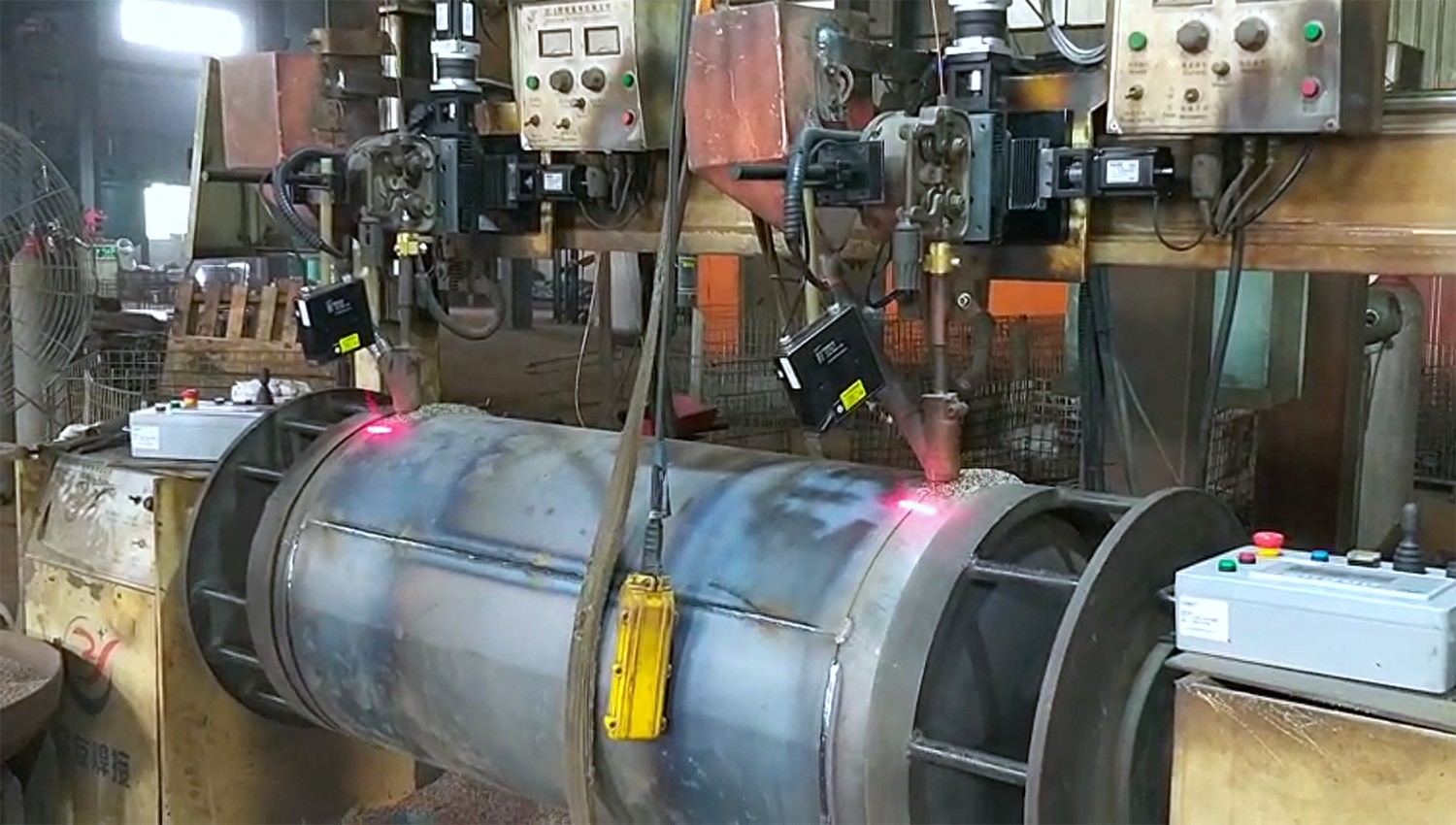
工業(yè)相機在焊縫跟蹤中的關(guān)鍵作用有哪些
激光跟蹤儀測量精度藏著大秘密,您了解多少?




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論