SPI通用接口層介紹
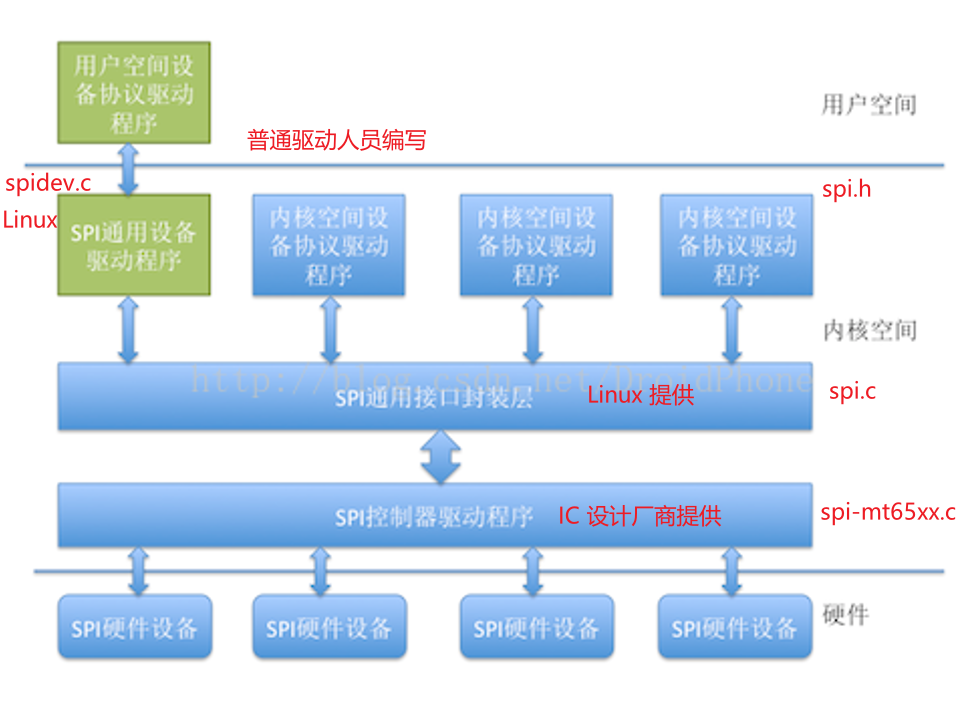
SPI 通用接口層 SPI 通用接口層把具體的 SPI 設備的協議驅動和 SPI 控制器驅動連接在一起。 負責 SPI 系統與 Linux 設備模型相關的初始化工作。 為協議驅動和控制器驅動提供一系列的標準接口 A...
SPI驅動源文件目錄在哪
SPI 驅動源文件目錄 Linux common spi driver kernel- 4.14 /drivers/ spi/spi.c Linux 提供的通用接口封裝層驅動kernel- 4.14 /drivers/ spi/spidev.c linux 提供的 SPI 通用設備驅動程序kernel- 4.14 /include/ linux /spi/ spi.h linux...
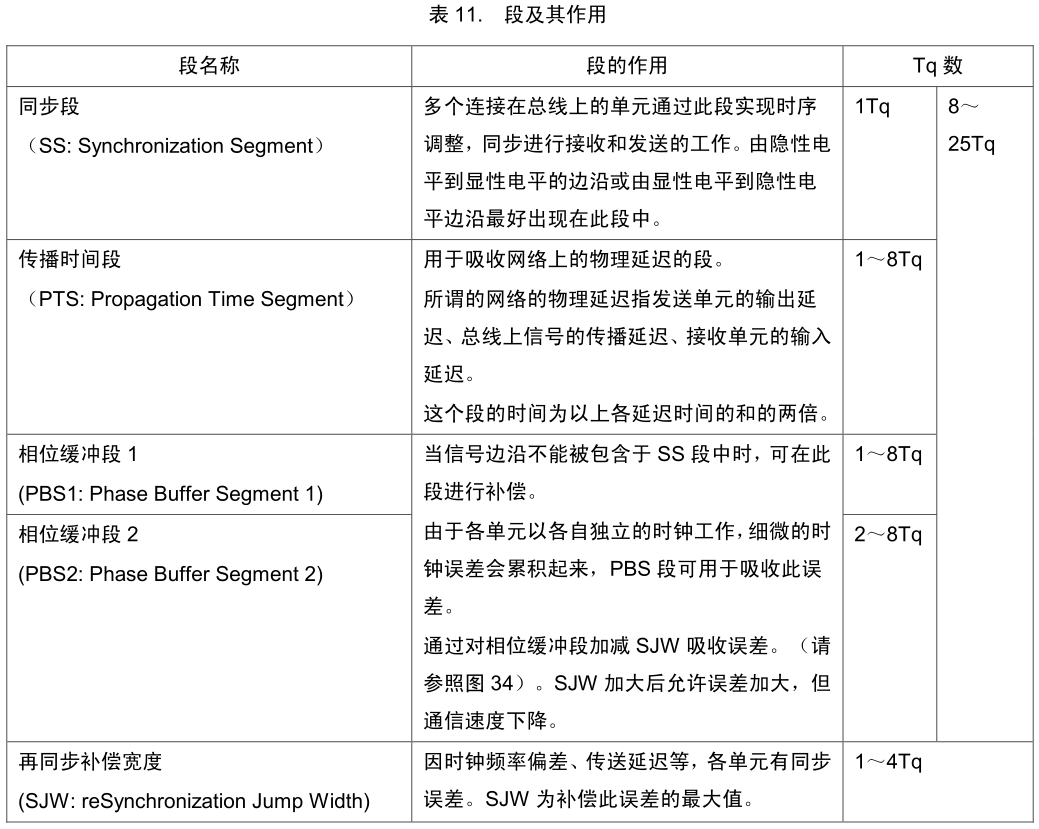
高速CAN速率 CAN總線位的4段
CAN 速率 CAN 總線以幀的形式發送數據,但是最終到總線上的就是“0”和“1”這樣的二進制數據,這里就涉及到了通信速率,也就是每秒鐘發送多少位數據,前面說了CAN2.0 最高速度為 1Mbps/S。對...


CAN協議的幾種幀格式介紹
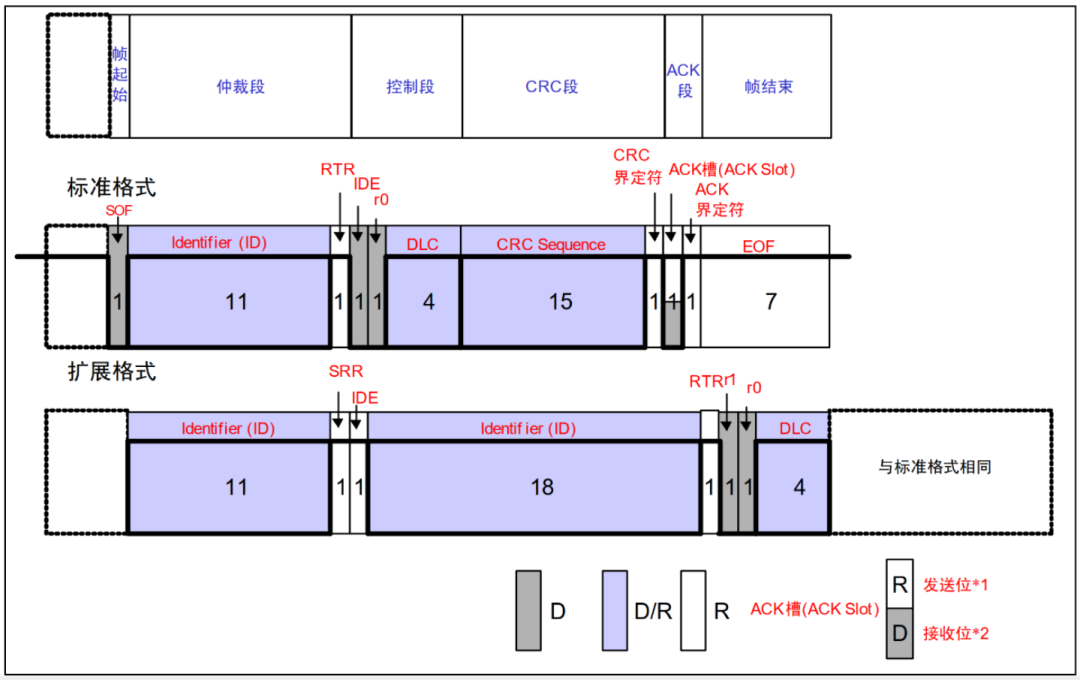
遙控幀 接收單元向發送單元請求數據的時候就用遙控幀,遙控幀由 6 個段組成: ①、幀起始,表示數據幀開始的段。②、仲裁段,表示該幀優先級的段。③、控制段,表示數據的字節數及保留...
CAN協議數據幀的介紹
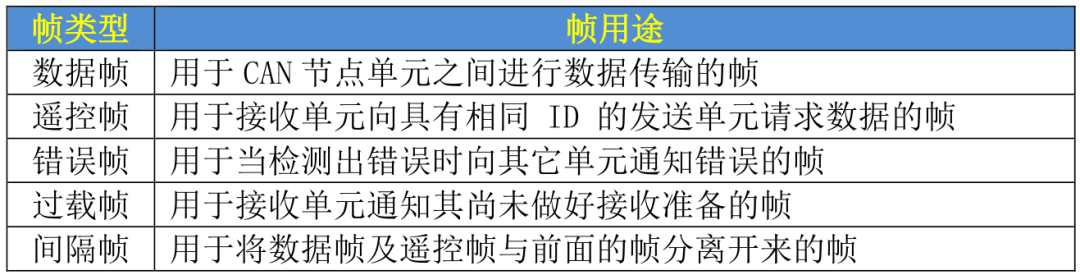
通過 CAN 總線傳輸數據是需要按照一定協議進行的,CAN 協議提供了 5種幀格式來傳輸數據:數據幀、遙控幀、錯誤幀、過載幀和幀間隔。其中數據幀和遙控幀有標準格式和擴展格式兩種,標準格...

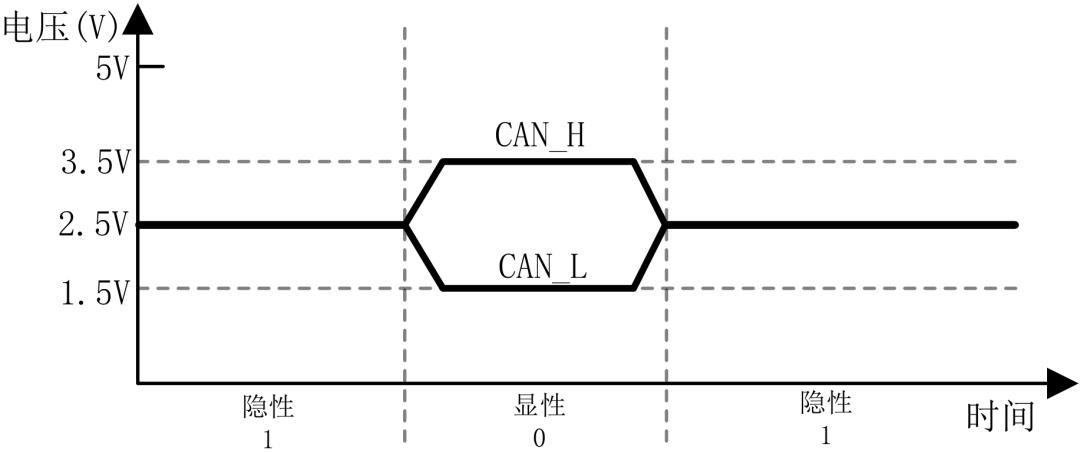
CAN介紹 CAN協議有哪些特點
CAN:Controller Area Network,控制局域網絡,最早由德國 BOSCH(博世)開發,,目前已經是國際標準(ISO 11898),是當前應用最廣泛的現場總線之一。 以汽車電子為例,汽車上有空調、車門、發動機...




I2C中什么是線與功能
線與功能 線與:所有 GPIO 輸出高就是高,只要有一個輸出低,整條線上面的都是低,這就是“與”的意思。 推挽結構下,兩個GPIO口連接到一根線上,假如左邊的PMOS導通,右邊的NMOS導通,Vdd就...

I2C推挽結構和開漏結構
I2C Architecture I2C 采用的 GPIO 一般為開漏模式,支持線與功能,但是開漏模式無法輸出高電平,所以需要外部上拉。Vdd 可以采用 5V、3.3V、1.8V等,電源電壓不同,上拉電阻阻值也不同。 一般總線...

I2C總線能掛多少設備
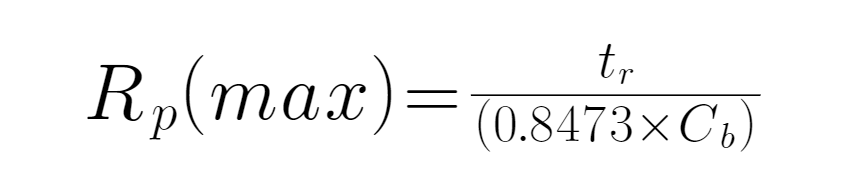
I2C 總線能掛多少設備? 7-bit address :2 的 7 次方,能掛 128 個設備。 10-bit address :2 的 10 次方,能掛 1024 個設備。 但是 I2C 協議規定,總線上的電容不可以超過 400pF。管腳都是有輸入電容的,...

雷達的干擾可分為?雷達干擾的基礎知識
頻率匹配:雷達干擾系統須以被干擾雷達的頻率發射信號。這不只適用于噪聲干擾,也適用于欺騙干擾。...
I2C總線的速率是多少
I2C 的速度 I2C 是一種低速、串行總線,有 SDA(串行數據線) 和 SCL(串行時鐘線) 兩條信號線,半雙工通信。通信速度如下: ? Bidirectional bus: Standard-mode (Sm), 100 kbit/s Fast-mode (Fm), ...
I2C子系統定義術語介紹
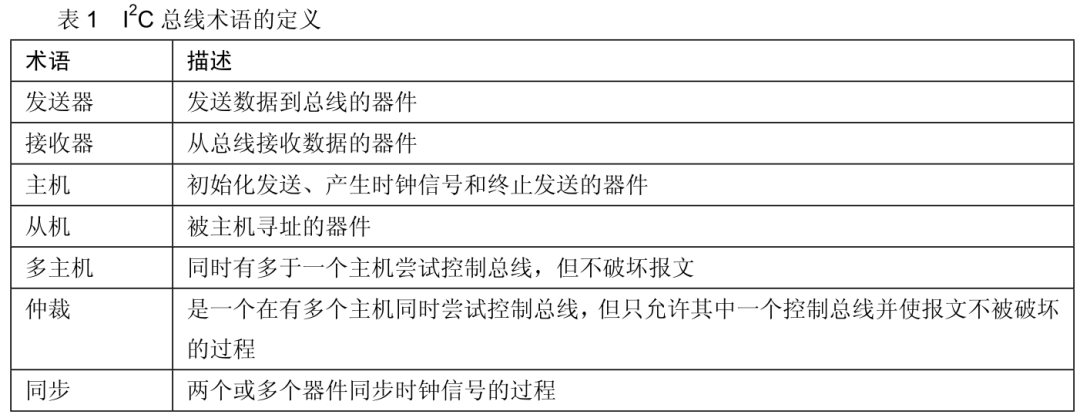
定義術語 1、數據有效性 在 SCL 高電平期間,SDA 必須穩定,所以一般情況下,SCL 高電平寬度小,SDA 高電平寬度大,用示波器看也是這樣的。 2、起始條件和停止條件 起始條件:SCL 高電平時,...

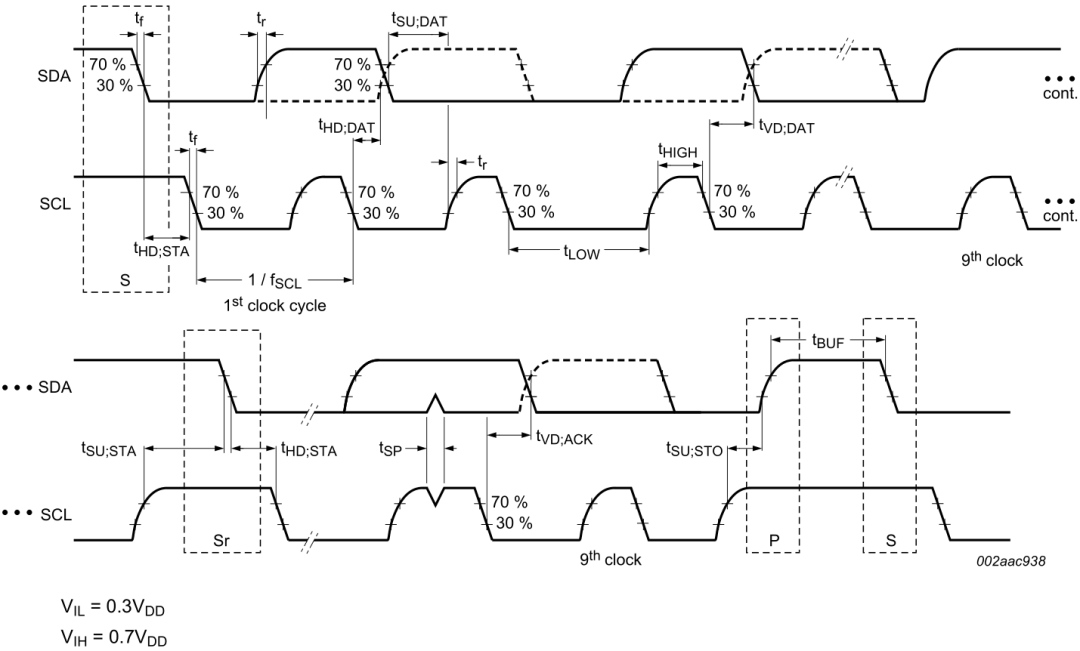
I2C協議介紹 I2C各種時間的定義
I2C Transfer Definition of timing 想要深入探討 I2C 協議,必須深刻理解各種時間的定義(F/S-mode) 標識符 定義 tf 信號下降時間 tr 信號上升時間 tLOW 信號低電平時間 tHIGH 信號高電平時間 tHD;DAT 數據保...

AMD Zen4 64核心撕裂者首次現身:96核心大殺四方
AMD的銳龍線程撕裂者這幾年一直“橫行霸道”,根本沒有對手,導致自身變得不急不慢。...

Android10系統內置fridaserver可執行程序到手機系統
adbd中涉及adb root權限開啟判斷源文件文件路徑...















編輯推薦廠商產品技術軟件/工具OS/語言教程專題
| 電機控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機 | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機 | PID | MOSFET | 傳感器 | 人工智能 | 物聯網 | NXP | 賽靈思 |
| 步進電機 | SPWM | 充電樁 | IPM | 機器視覺 | 無人機 | 三菱電機 | ST |
| 伺服電機 | SVPWM | 光伏發電 | UPS | AR | 智能電網 | 國民技術 | Microchip |
| 開關電源 | 步進電機 | 無線充電 | LabVIEW | EMC | PLC | OLED | 單片機 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 藍牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太網 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 語音識別 | 萬用表 | CPLD | 耦合 | 電路仿真 | 電容濾波 | 保護電路 | 看門狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 閾值電壓 | UART | 機器學習 | TensorFlow |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |



 工商網監
工商網監