了解CAN總線的人都知道,CAN總線在的幀數(shù)據(jù)在總線上傳送時(shí),其它的CAN控制器是通過(guò)驗(yàn)收濾波來(lái)決定總線上的數(shù)據(jù)幀的ID是否和本節(jié)點(diǎn)相吻合
2015-10-26 14:10:08 3551
3551 
最近在調(diào)試一個(gè)CAN總線的設(shè)備遇到一些問(wèn)題,簡(jiǎn)單總結(jié)一下。本文會(huì)對(duì)CAN總線進(jìn)行簡(jiǎn)單介紹,CAN的硬件鏈路層,協(xié)議層,以及調(diào)試的一些心得。
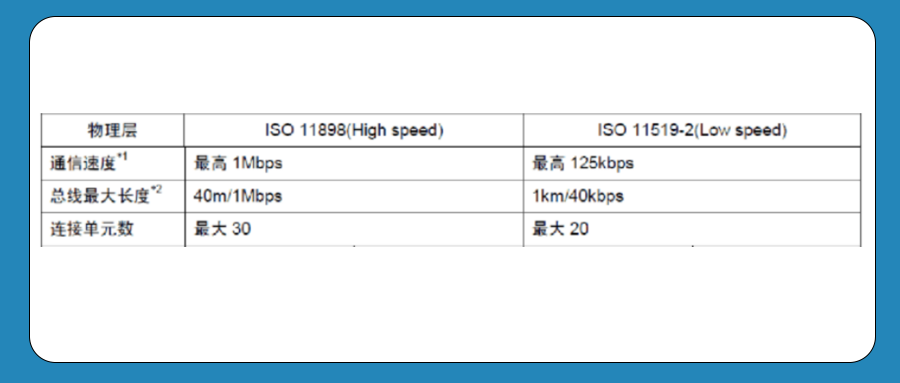
2022-09-15 15:32:322604 在ISO 11898-2和ISO 11898-3中分別規(guī)定了兩種CAN總線結(jié)構(gòu)(在BOSCH CAN2.0規(guī)范中,并沒(méi)有關(guān)于總線拓?fù)浣Y(jié)構(gòu)的說(shuō)明):高速CAN總線和低速CAN總線,區(qū)別表如下所示。
2023-04-07 09:30:184054 
CAN是是國(guó)際上應(yīng)用最廣泛的現(xiàn)場(chǎng)總線之一。
2023-04-10 10:32:302981 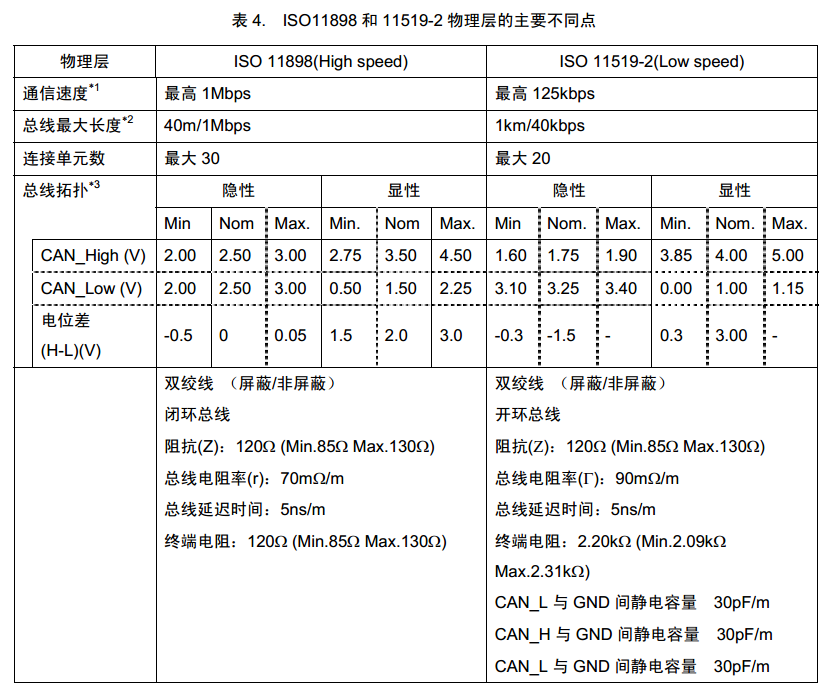
我們知道,CAN總線上的每個(gè)節(jié)點(diǎn)往總線上發(fā)送數(shù)據(jù)的同時(shí),會(huì)讀取總線上的數(shù)據(jù),并與自己發(fā)送的數(shù)據(jù)作對(duì)比。
2023-06-07 09:32:132866 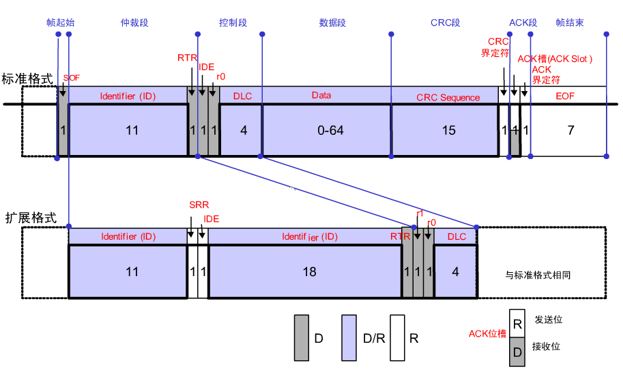
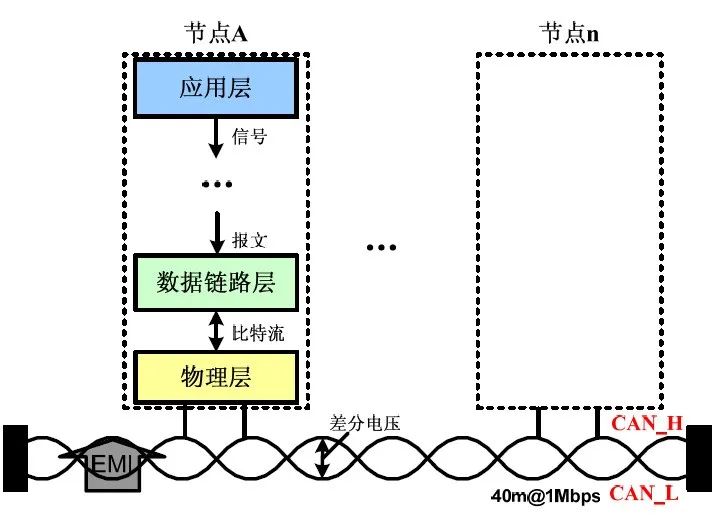
我們根據(jù)can總線具有的一些特性可知:CAN總線肯定具有分層結(jié)構(gòu),而且參考OSI模型(OSI參考模型介紹)是肯定的,我們可以看一下相關(guān)的文檔可知:CAN遵從OSI模型。
2024-01-05 09:40:161946 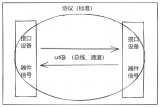
這意味著變送器通過(guò)CAN收發(fā)器改變總線電平,并將其信息傳輸?shù)?b class="flag-6" style="color: red">CAN總線。接收器通過(guò)監(jiān)測(cè)總線電平將總線上的信息讀取到自己的CAN收發(fā)器中。
2024-02-19 14:53:5410588 
提及總線,總是讓人聯(lián)想到那些交錯(cuò)在一起的計(jì)算機(jī)電線。那么這些電線如何發(fā)揮功效呢?這還得配合總線協(xié)議的管理來(lái)使用。那么今天我們介紹的就是CAN總線協(xié)議。看看這個(gè)協(xié)議的含義和應(yīng)用吧。CAN總線協(xié)議
2024-10-15 08:05:233113 
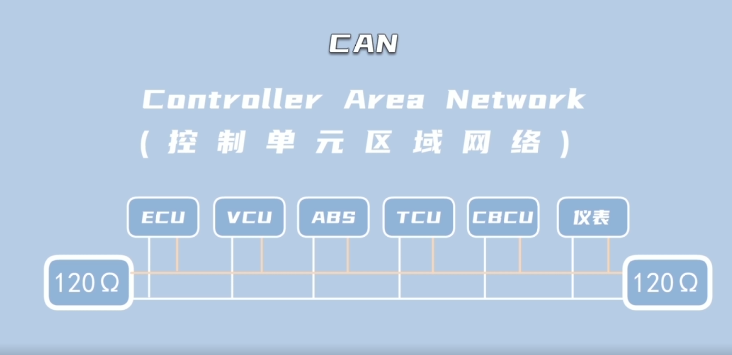
CAN 通訊實(shí)驗(yàn)CAN 介紹CAN 總線介紹CAN 是Controller Area Network 的縮寫(xiě)(以下稱(chēng)為CAN),中文意思是控制器局域網(wǎng)絡(luò),是ISO 國(guó)際標(biāo)準(zhǔn)化的串行通信協(xié)議。在
2021-08-05 06:54:40
錄1.Can總線電平介紹2.Can總線何時(shí)是空閑的3.Can總線的標(biāo)準(zhǔn)幀和擴(kuò)展幀結(jié)構(gòu)4Can總線幀類(lèi)型4.1 數(shù)據(jù)幀4.2 遠(yuǎn)程幀4.3 錯(cuò)誤幀(1)錯(cuò)誤情景分下面幾類(lèi)(2)錯(cuò)誤幀類(lèi)型4.4 過(guò)載幀5.Can總...
2021-08-23 08:44:20
本文主要簡(jiǎn)單介紹CAN總線的相關(guān)概念,以及通信協(xié)議等知識(shí),和使用STM32自帶的bxCAN外設(shè)進(jìn)行CAN總線編程實(shí)驗(yàn),以及編程心得。
2021-08-19 08:01:12
CAN 總線(Controller Area Network)是控制器局域網(wǎng)的簡(jiǎn)稱(chēng),是 20 世紀(jì) 80 年代初德國(guó) BOSCH 公司為解決現(xiàn)代汽車(chē)中眾多的控制與測(cè)試儀器之間的數(shù)據(jù)交換而開(kāi)發(fā)的一種
2018-12-13 14:26:31
,不會(huì)出現(xiàn)網(wǎng)絡(luò)癱瘓,從而提高整個(gè)系統(tǒng)的穩(wěn)定性。cAN協(xié)議采用CRc檢驗(yàn)并可提供相應(yīng)的錯(cuò)誤處理功能,保證了數(shù)據(jù)通信的可靠性。同時(shí),由于cAN總線的系統(tǒng)靈活,其節(jié)點(diǎn)可以在不要求現(xiàn)存節(jié)點(diǎn)及其應(yīng)用層改變?nèi)魏诬浖蛴布那闆r下,接入cAN網(wǎng)絡(luò),大大提高了系統(tǒng)的可擴(kuò)充的能力。
2023-09-19 06:45:45
基于FPGA的CAN總線通信系統(tǒng)為了克服單片機(jī)固有的缺陷, 滿足航天控制的需求, 文章提出了如何利用FPGA采用查詢(xún)的方式控制CAN控制器SJA1000,從而實(shí)現(xiàn)CAN總線數(shù)據(jù)通信的方法; 介紹了
2012-08-11 11:55:19
控制器局域網(wǎng)(CAN)是現(xiàn)代汽車(chē)網(wǎng)絡(luò)通信與控制系統(tǒng)中的重要組成部分,《汽車(chē)CAN總線系統(tǒng)原理、設(shè)計(jì)與應(yīng)用》全面、系統(tǒng)地介紹了汽車(chē)CAN總線的基本原理、應(yīng)用層協(xié)議制定、系統(tǒng)軟件和硬件設(shè)計(jì),并且通過(guò)實(shí)例
2018-04-09 22:27:02
基于STM32的CAN總線通信學(xué)習(xí)筆記本文主要簡(jiǎn)單介紹CAN總線的相關(guān)概念,以及通信協(xié)議等知識(shí),和使用STM32自帶的bxCAN外設(shè)進(jìn)行CAN總線編程實(shí)驗(yàn),以及編程心得。1. CAN總線簡(jiǎn)要介紹概念:CAN是控制器局域網(wǎng)絡(luò)(Controller Area Netwo...
2021-08-19 07:23:37
CAN數(shù)據(jù)總線系統(tǒng)簡(jiǎn)介
2008-08-04 20:18:50 28
28 簡(jiǎn)要介紹了CAN總線技術(shù)與USB總線技術(shù)的特點(diǎn),給出了通過(guò)將兩特點(diǎn)相結(jié)合,并選用微控制器AT89C52堯USB控制芯片CH372和獨(dú)立CAN控制芯片SJA1000實(shí)現(xiàn)USB-CAN數(shù)據(jù)傳輸系統(tǒng)的設(shè)計(jì)方案遙該
2009-03-07 10:10:1714 根據(jù)控制局域網(wǎng)絡(luò)(CAN)的特點(diǎn)及應(yīng)用要求,提出一種新的動(dòng)態(tài)調(diào)度協(xié)議(DSP),通過(guò)動(dòng)態(tài)選擇時(shí)間間隙調(diào)度信息,同時(shí)考慮實(shí)時(shí)數(shù)據(jù)的重傳機(jī)制,并在此基礎(chǔ)上介紹基于CAN 總線的實(shí)
2009-03-30 10:24:5026 本文介紹了一種基于CAN總線的網(wǎng)絡(luò)監(jiān)控系統(tǒng)方案。該方案使用CAN卡和DSP中的CAN模塊作為上下位機(jī)通信接口,研究了CAN通信協(xié)議模型,VC++與CAN卡的通信接口,DSP中CAN模塊通信的數(shù)據(jù)處
2009-06-01 15:32:2227 本文將介紹CAN 總線節(jié)點(diǎn)的設(shè)計(jì)以及在實(shí)時(shí)操作系統(tǒng)Small RTOS51 下CAN 總線的數(shù)據(jù)接收與發(fā)送原理。讀者通過(guò)閱讀本文可以了解一個(gè)CAN 節(jié)點(diǎn)的設(shè)計(jì)過(guò)程, CAN 總線接口驅(qū)動(dòng)程序的編寫(xiě)以
2009-06-06 15:57:2027 本文提出了一種以CAN 總線為基礎(chǔ)的數(shù)據(jù)采集模塊設(shè)計(jì)方案,介紹了該數(shù)據(jù)采集模塊的功能、軟件、硬件設(shè)計(jì)方法。實(shí)驗(yàn)證明基于CAN 總線的數(shù)據(jù)采集模塊具有結(jié)構(gòu)簡(jiǎn)單、轉(zhuǎn)換速度
2009-06-15 08:11:0917 在VXI總線系統(tǒng)中,為了能夠獲得大量實(shí)時(shí)數(shù)據(jù),需要利用CAN總線快速可靠的傳輸數(shù)據(jù)的性能,設(shè)計(jì)一種混合VXI總線和CAN總線的系統(tǒng)。在這種混合系統(tǒng)中要實(shí)現(xiàn)CAN總線上各個(gè)節(jié)點(diǎn)采集
2009-07-06 16:27:5813 介紹了基于CAN總線的車(chē)輛虛擬儀表多路數(shù)據(jù)采集系統(tǒng)的設(shè)計(jì)方法,給出了系統(tǒng)詳細(xì)框圖和關(guān)鍵電路圖.詳細(xì)分析了CAN通信子程序,并給出了CAN通信初始化子程序、數(shù)據(jù)發(fā)送和中斷服務(wù)
2009-08-12 17:10:3132 針對(duì)CAN 總線技術(shù)應(yīng)用的蓬勃發(fā)展,本文設(shè)計(jì)了一種基于CAN 總線的工程設(shè)備控制系統(tǒng),對(duì)總線通訊協(xié)議進(jìn)行了設(shè)計(jì)研究,介紹了基于CAN 總線技術(shù)的作業(yè)控制終端、作業(yè)控制器、虛擬
2009-09-03 10:14:0216 根據(jù)海洋浮標(biāo)的特點(diǎn),運(yùn)用現(xiàn)場(chǎng)總線技術(shù),設(shè)計(jì)了基于CAN 總線的浮標(biāo)數(shù)據(jù)采集系統(tǒng)。實(shí)驗(yàn)表明,CAN 總線的應(yīng)用為傳統(tǒng)的海洋浮標(biāo)采集系統(tǒng)提供了一種新的采集方式,具有高速度、
2009-09-03 11:34:1018 介紹了CAN 總線在航天領(lǐng)域的應(yīng)用狀況,在對(duì)CAN 總線技術(shù)和DSP 芯片功能研究的基礎(chǔ)上,設(shè)計(jì)了基于CAN 總線和DSP 的雙層數(shù)據(jù)采集系統(tǒng),本數(shù)據(jù)采集系統(tǒng)對(duì)于CAN 總線技術(shù)在航天領(lǐng)域
2009-09-26 09:11:3923 基于CAN總線的變頻設(shè)備遠(yuǎn)程監(jiān)控系統(tǒng)的實(shí)現(xiàn)
CAN總線介紹:
CAN總線有以下特點(diǎn):
2009-10-10 08:56:30925 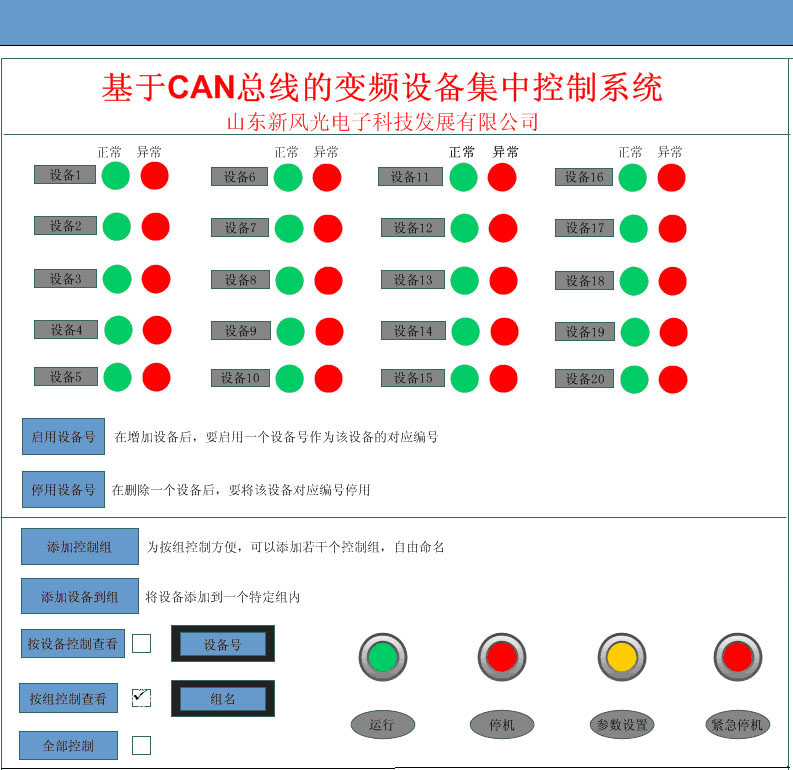
SD卡在記錄汽車(chē)CAN總線數(shù)據(jù)中的應(yīng)用
提出了用SD卡來(lái)實(shí)現(xiàn)記錄汽車(chē)CAN總線數(shù)據(jù)的設(shè)計(jì),介紹了基于LPC2368的SD卡FAT文件系統(tǒng)的實(shí)現(xiàn)方法,并給出了該設(shè)計(jì)的硬件接口與軟件
2009-10-27 11:14:271036 
DSP的CAN總線系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)
摘要:介紹了基于DSP的CAN控制器的設(shè)計(jì)及應(yīng)用方法,利用該方法可以在波特率高達(dá)lMb/s的條件下穩(wěn)定、可靠地傳輸數(shù)據(jù),而且延遲時(shí)間很少
2010-04-03 11:20:325268 
本文首先介紹PCI總線控制器PCI9052與CAN總線通信控制器SJA1000的工作原理,并且介紹了PCI總線和CAN總線通信控制器接口的硬件和軟件實(shí)現(xiàn)方法。
2011-09-23 17:34:222521 
本文介紹了CAN 總線的主要性能及特點(diǎn),CAN 總線在實(shí)際工業(yè)應(yīng)用中的總體結(jié)構(gòu),同時(shí)給出了CAN 總線協(xié)議轉(zhuǎn)換器的硬件設(shè)計(jì)方法和通信協(xié)議。主要研究了CAN 總線接口電路設(shè)計(jì),把所設(shè)計(jì)的
2011-10-31 15:01:47463 CAN總線規(guī)范介紹。
2016-03-03 18:12:3814 CAN總線權(quán)威介紹
2016-12-13 17:15:192 CAN總線權(quán)威介紹
2016-12-16 18:57:414 CAN 總線的物理連接只需要兩根線,常稱(chēng)為 CAN_H 和 CAN_L,通過(guò)差分信號(hào)進(jìn)行數(shù)據(jù)的傳輸。CAN 總線有兩種電平,分別為 隱性電平 和 顯性電平,這兩種電平有著類(lèi)似漏極 I/O 電平信號(hào)之間“與”的關(guān)系:
2018-07-11 16:31:0013626 
基于保證CAN總線網(wǎng)絡(luò)傳輸數(shù)據(jù)時(shí)可靠性的目的,采用了從包內(nèi)數(shù)據(jù)的可靠性、數(shù)據(jù)包的可靠性傳輸兩方面進(jìn)行驗(yàn)證的方法,通過(guò)多次對(duì)比使用文章設(shè)計(jì)的算法、不使用文章設(shè)計(jì)的算法時(shí)CAN總線網(wǎng)絡(luò)傳輸數(shù)據(jù)的準(zhǔn)確率
2017-12-21 16:19:060 本文開(kāi)始介紹了CAN總線的概念和特點(diǎn),其次介紹了CAN總線的工作原理及優(yōu)缺點(diǎn),最后介紹了CAN總線的應(yīng)用。
2018-04-24 16:53:4594255 
本文首先介紹了CAN總線的總體結(jié)構(gòu),其次介紹了汽車(chē)CAN總線數(shù)據(jù)傳輸系統(tǒng)構(gòu)成及工作原理,最后介紹了汽車(chē)CAN總線故障產(chǎn)生的原因以及用萬(wàn)用表測(cè)量診斷CAN總線方法詳解。
2018-04-25 08:54:18151421 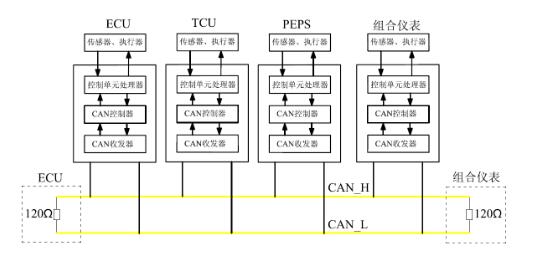
本文首先介紹了can總線的概念與特點(diǎn),其次介紹了CAN總線原理與CAN總線的應(yīng)用,最后分析了can總線是數(shù)字信號(hào)還是模擬信號(hào)以及闡述了模擬信號(hào)和數(shù)字信號(hào)之間的區(qū)別。
2018-04-25 09:15:5781318 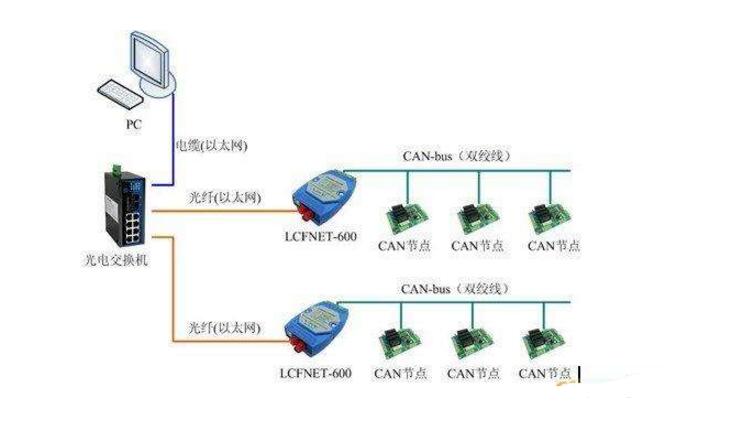
本文首先介紹了CAN總線技術(shù)的優(yōu)點(diǎn),其次介紹了CAN總線技術(shù)在汽車(chē)中的實(shí)際應(yīng)用優(yōu)勢(shì),最后介紹了CAN總線國(guó)內(nèi)外發(fā)展和應(yīng)用狀況以及CAN總線技術(shù)及發(fā)展趨勢(shì)。
2018-04-25 09:35:4419160 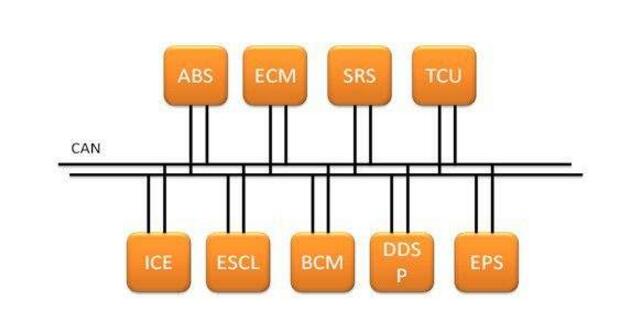
CAN已經(jīng)形成國(guó)際標(biāo)準(zhǔn),并已被公認(rèn)為幾種最有前途的現(xiàn)場(chǎng)總線之一。CAN 總線的數(shù)據(jù)通信具有突出的可靠性、實(shí)時(shí)性和靈活性。由于其良好的性能及獨(dú)特的設(shè)計(jì),CAN總線越來(lái)越受到人們的重視,它在汽車(chē)領(lǐng)域上的應(yīng)用是最廣泛的。接下來(lái)及跟隨小編一起來(lái)了解一下CAN總線的工作原理、特點(diǎn)及優(yōu)缺點(diǎn)、應(yīng)用領(lǐng)域及應(yīng)用案例吧。
2018-05-07 10:36:3936240 
CAN:Controller Area Network,控制器局域網(wǎng)是一種能有效支持分布式控制和實(shí)時(shí)控制的串行通訊網(wǎng)絡(luò)。本文首先介紹了CAN總線系統(tǒng)結(jié)構(gòu)及數(shù)據(jù)傳輸,其次詳細(xì)的闡述了CAN總線過(guò)載幀及數(shù)據(jù)幀,具體的跟隨小編一起來(lái)了解一下吧。
2018-05-07 10:59:0123338 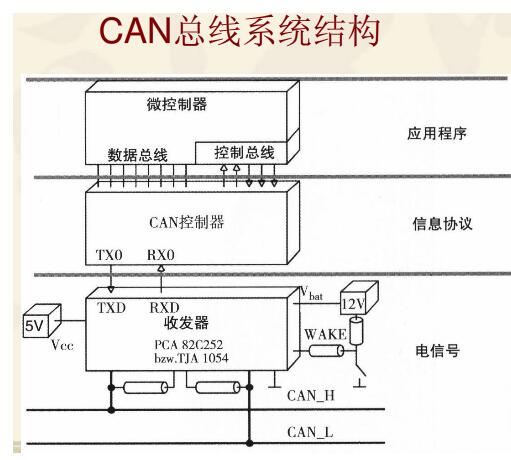
本文首先介紹了CAN總線仲裁是什么,其次介紹了CAN總線仲裁的示意圖,最后詳細(xì)的闡述了CAN總線位仲裁技術(shù),具體的跟隨小編一起來(lái)了解一下吧。
2018-05-07 14:27:2617611 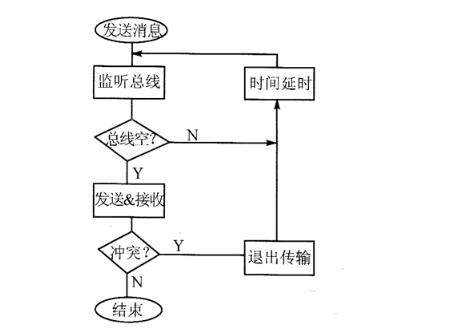
CAN總線負(fù)載率只是一個(gè)宏觀的參數(shù),已經(jīng)不能充分的評(píng)估總線的有效性和可擴(kuò)展性。一般業(yè)內(nèi)的對(duì)負(fù)載率的定義為實(shí)際數(shù)據(jù)傳輸速率和理論上能達(dá)到的數(shù)據(jù)傳輸速率的比值,本文主要介紹了can總線負(fù)載率如何計(jì)算及CAN總線負(fù)載率必需小于30%問(wèn)題的解答,具體的跟隨小編一起來(lái)了解一下。
2018-05-07 16:34:3145404 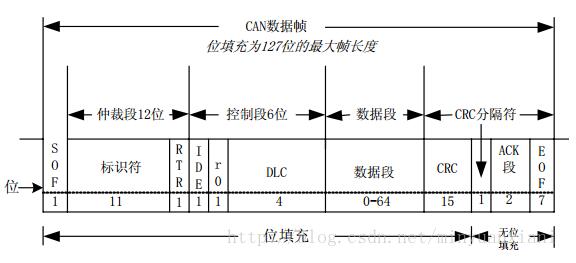
總線,在通訊上也會(huì)受到部分干擾,所以改造CAN總線迫在眉睫。本文首先介紹了什么是光纖及can總線,其次介紹了為什么要用光纖CAN轉(zhuǎn)換器,最后闡述了基于光纖轉(zhuǎn)CAN模塊的CAN總線通信改造步驟詳解。
2018-05-07 17:09:358383 本文說(shuō)的CAN即是一種總線,也是一種協(xié)議。因此,我們常聽(tīng)見(jiàn)CAN總線,也常聽(tīng)見(jiàn)CAN協(xié)議。CAN協(xié)議和CANOpen協(xié)議是兩套不同的協(xié)議。從軟硬件層次來(lái)劃分,CAN協(xié)議屬于硬件協(xié)議,而CANOpen
2018-10-03 19:53:0076048 
本文檔額度主要內(nèi)容詳細(xì)介紹的是CAN總線教程之CAN總線快速入門(mén)資料免費(fèi)下載主要內(nèi)容包括了:CAN總線概述,數(shù)據(jù)鏈路層,物理層
2018-12-07 17:20:39221 GCAN-401 CAN總線數(shù)據(jù)存儲(chǔ)器模塊是我公司推出的專(zhuān)門(mén)用于離線存儲(chǔ)CAN總線數(shù)據(jù)的模塊。該模塊集成1路標(biāo)準(zhǔn)CAN總線接口,用戶只需將該模塊接入到標(biāo)準(zhǔn)CAN總線上并且保持上電,即可實(shí)現(xiàn)實(shí)時(shí)的將所有CAN總線上的數(shù)據(jù)存儲(chǔ)到模塊自身的存儲(chǔ)卡中,便于用戶后續(xù)回放及分析。
2019-01-16 16:50:365055 
本文檔的主要內(nèi)容詳細(xì)介紹的是CAN總線基礎(chǔ)的詳細(xì)資料概述包括了:概述,汽車(chē)總線與CAN標(biāo)準(zhǔn),CAN的通信機(jī)制,數(shù)據(jù)幀,錯(cuò)誤檢測(cè)與錯(cuò)誤幀,CAN的幀格式,位定時(shí)與同步
2019-11-29 15:31:20123 CAN協(xié)議教程 介紹:CAN總線 CAN總線是廣播類(lèi)型的總線。這意味著所有節(jié)點(diǎn)都可以偵聽(tīng)到所有傳輸?shù)膱?bào)文。無(wú)法將報(bào)文單獨(dú)發(fā)送給指定節(jié)點(diǎn);所有節(jié)點(diǎn)都將始終捕獲所有報(bào)文。但是,CAN硬件能夠提供本地過(guò)濾
2020-04-03 15:32:2215228 采用NXP公司的Cortex-M3處理器作為CAN總線的發(fā)送端,并以ZLG公司的PCI9820I CAN卡作為CAN總線的接收端測(cè)試數(shù)據(jù)的傳輸。重點(diǎn)介紹闡述了系統(tǒng)硬件和軟件的設(shè)計(jì)方法。系統(tǒng)可靠地實(shí)現(xiàn)了CAN通信。
2021-04-19 16:55:0243 結(jié)合汽車(chē)技術(shù)發(fā)展對(duì)傳統(tǒng)布線方法中存在的問(wèn)題和CAN總線系統(tǒng)的使用進(jìn)行了介紹,總結(jié)了CAN總線系統(tǒng)的優(yōu)點(diǎn)。
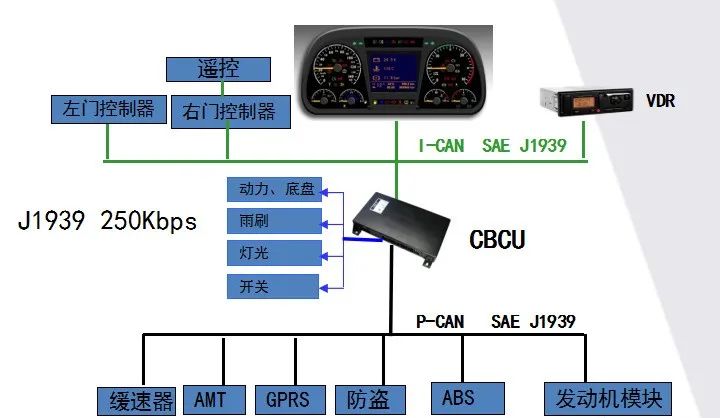
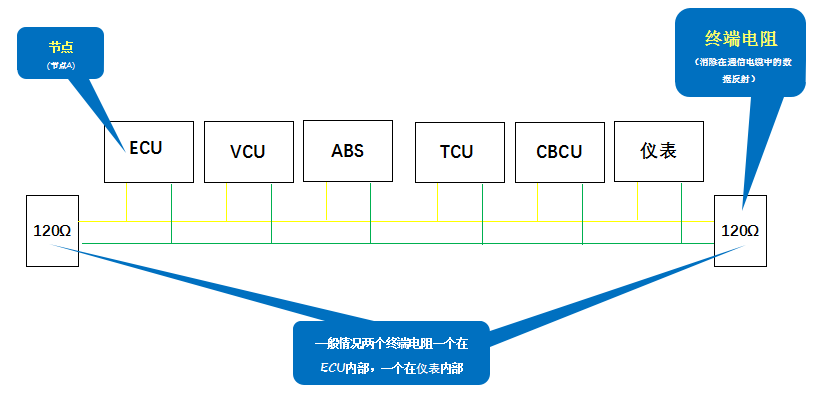
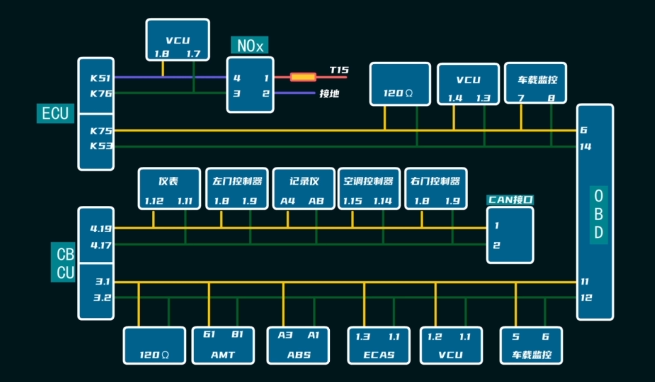
2021-04-19 17:31:3033 所有控制儀表的相關(guān) CAN 總線,例如:舒適系統(tǒng)數(shù)據(jù)總線,都圍繞在中心點(diǎn)。 插頭連接 CAN 總線中心點(diǎn)。
2021-04-20 09:36:5322 在分析CAN總線雙絞線和光纖傳輸特點(diǎn)的基礎(chǔ)上,提出一種基于光纖收發(fā)一體模塊及CAN總線控制器SJAl000的光纖傳輸接口設(shè)計(jì)方案;詳細(xì)介紹光纖收發(fā)器的選取及傳輸接口的實(shí)現(xiàn);根據(jù)光纖收發(fā)一體模塊
2021-04-20 10:24:3733 CAN總線的8個(gè)特點(diǎn)介紹說(shuō)明。
2021-04-20 13:58:067 總線是當(dāng)今自動(dòng)化領(lǐng)域技術(shù)發(fā)展的熱點(diǎn)之一,被譽(yù)為自動(dòng)化領(lǐng)域的計(jì)算機(jī)局域網(wǎng)。 一般工程師們都知道在汽車(chē)中大部分都會(huì)用到CAN總線,其實(shí)還有許多的船艦電子設(shè)備通信也會(huì)用到CAN總線,現(xiàn)在CAN總線的適用范圍越來(lái)越廣泛。 CAN總線的優(yōu)勢(shì)是網(wǎng)絡(luò)各節(jié)點(diǎn)之間的數(shù)據(jù)通信實(shí)時(shí)性強(qiáng)、開(kāi)發(fā)
2021-08-07 16:37:1321073 【科普】CAN總線介紹及FPGA實(shí)現(xiàn)方案簡(jiǎn)介 這里我們先逆推一下CAN總線的一些特點(diǎn)。 第一,CAN總線分層結(jié)構(gòu) 我們根據(jù)can總線具有的一些特性可知:CAN總線肯定具有分層結(jié)構(gòu),而且參考OSI模型
2021-11-18 16:35:556765 
很多的司機(jī)朋友以及工控圈的朋友都有聽(tīng)到過(guò)“CAN總線”一詞,今天我們就來(lái)一起看一下CAN總線為什么這么火? CAN總線,也叫做控制器局域網(wǎng)總線(Controller Area Network
2022-01-15 17:04:486523 網(wǎng)口轉(zhuǎn)can口工具是能夠用來(lái)實(shí)現(xiàn)CAN總線數(shù)據(jù)與以太網(wǎng)數(shù)據(jù)間相互轉(zhuǎn)換的設(shè)備,其典型特征就是有RJ45類(lèi)型的網(wǎng)絡(luò)接口。
2022-05-05 12:02:583752 在本系列文章中,我們將為您詳細(xì)介紹CAN總線錯(cuò)誤的相關(guān)知識(shí),包括CAN總線錯(cuò)誤的基礎(chǔ)概念、CAN總線錯(cuò)誤的類(lèi)型、CAN錯(cuò)誤幀和CAN節(jié)點(diǎn)錯(cuò)誤狀態(tài),并通過(guò)實(shí)際的應(yīng)用測(cè)試生成并記錄CAN錯(cuò)誤。
2022-05-27 17:56:123895 在本系列文章中,我們將為您詳細(xì)介紹CAN總線錯(cuò)誤的相關(guān)知識(shí),包括CAN總線錯(cuò)誤的基礎(chǔ)概念、CAN總線錯(cuò)誤的類(lèi)型、CAN錯(cuò)誤幀和CAN節(jié)點(diǎn)錯(cuò)誤狀態(tài),并通過(guò)實(shí)際的應(yīng)用測(cè)試生成并記錄CAN錯(cuò)誤。
2022-06-13 16:08:349243 以太網(wǎng)轉(zhuǎn)can模塊能夠讓以太網(wǎng)總線上的設(shè)備與CAN總線上的設(shè)備互發(fā)信息,協(xié)同使用,是一種常用的CAN數(shù)據(jù)轉(zhuǎn)換器。那么,它應(yīng)該如何連接使用呢?我們簡(jiǎn)單的聊聊。
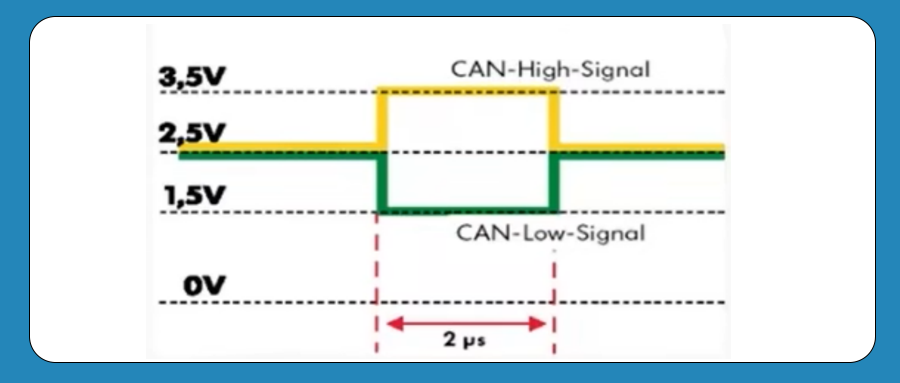
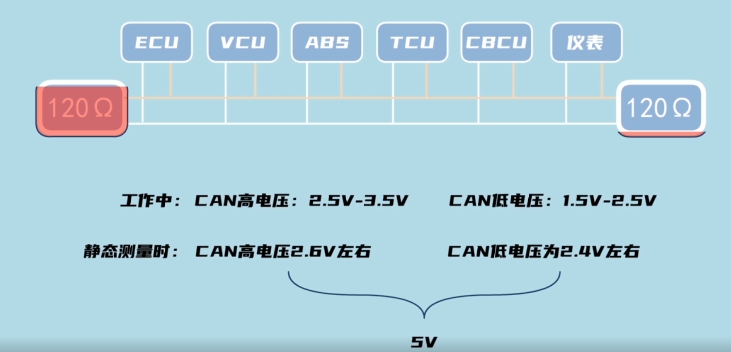
2022-06-20 09:22:5711049 高速CAN總線上為顯性電平(邏輯0)時(shí),CAN_H為3.5V、CAN_L為1.5V,此時(shí)電壓差是2V,顯性狀態(tài)的CAN總線電壓范圍。
高速CAN總線上為隱性電平(邏輯1)時(shí),CAN_H和CAN_L都為2.5V,此時(shí)電壓差就是0V,隱性狀態(tài)的CAN總線電壓范圍。
2022-09-13 16:57:225992 全新CAN總線數(shù)據(jù)記錄儀,讓總線記錄更簡(jiǎn)捷!
2022-09-26 16:09:431313 
個(gè)比方,如果把CAN總線舒適系統(tǒng)比作一列火車(chē),CAN驅(qū)動(dòng)系統(tǒng)總線看成一列快車(chē),相互傳輸?shù)?b class="flag-6" style="color: red">CAN數(shù)據(jù)看成旅客,則旅客要想換乘動(dòng)車(chē)或者快車(chē),需經(jīng)過(guò)站臺(tái),那么站臺(tái)就是網(wǎng)關(guān)(Gateway)。
2022-11-03 10:05:421742 【導(dǎo)讀】介紹了CAN總線與伺服電機(jī)的特點(diǎn),并討論了伺服電機(jī)基于CAN總線的通信控制特性。
2022-12-27 10:57:569587 即從CAN控制芯片輸出邏輯電平到CAN收發(fā)器,然后經(jīng)過(guò)CAN收發(fā)器內(nèi)部轉(zhuǎn)換將邏輯電平轉(zhuǎn)換為差分信號(hào)輸出到CAN總線上,CAN總線上的節(jié)點(diǎn)都可以決定自己是否需要總線上的數(shù)據(jù)。
2023-03-29 10:06:1611153 AsimpleintrotoCANerrorsCAN總線錯(cuò)誤介紹在本系列文章中,我們將為您詳細(xì)介紹CAN總線錯(cuò)誤的相關(guān)知識(shí),包括CAN總線錯(cuò)誤的基礎(chǔ)概念、CAN總線錯(cuò)誤的類(lèi)型、CAN錯(cuò)誤幀和CAN
2022-06-09 09:46:533311 
AsimpleintrotoCANerrorsCAN總線錯(cuò)誤介紹在本系列文章中,我們將為您詳細(xì)介紹CAN總線錯(cuò)誤的相關(guān)知識(shí),包括CAN總線錯(cuò)誤的基礎(chǔ)概念、CAN總線錯(cuò)誤的類(lèi)型、CAN錯(cuò)誤幀和CAN
2022-05-27 10:39:215790 AsimpleintrotoCANerrorsCAN總線錯(cuò)誤介紹在本系列文章中,我們將為您詳細(xì)介紹CAN總線錯(cuò)誤的相關(guān)知識(shí),包括CAN總線錯(cuò)誤的基礎(chǔ)概念、CAN總線錯(cuò)誤的類(lèi)型、CAN錯(cuò)誤幀和CAN
2022-06-02 09:41:242311 can總線負(fù)載率多少合理? CAN總線是一種控制器區(qū)域網(wǎng)絡(luò),它是用于在不同設(shè)備之間進(jìn)行通信的技術(shù)。CAN總線的應(yīng)用領(lǐng)域廣泛,例如汽車(chē)、航空航天、醫(yī)學(xué)儀器等。在CAN總線中,數(shù)據(jù)通過(guò)網(wǎng)絡(luò)傳輸,并且在
2023-09-07 15:05:414877 工程師們?cè)u(píng)估網(wǎng)絡(luò)的性能和可靠性。本文將詳細(xì)介紹CAN總線負(fù)載率的計(jì)算方法。 一、CAN總線負(fù)載率的定義 CAN總線負(fù)載率,指的是在一個(gè)特定時(shí)間內(nèi),總線上發(fā)送和接收數(shù)據(jù)的比率。如果總線的負(fù)載率過(guò)高,就會(huì)導(dǎo)致數(shù)據(jù)沖突、錯(cuò)誤和延遲等問(wèn)題,最終
2023-09-07 15:05:457869 can總線干擾信號(hào)如何消除?? CAN總線是一種廣泛應(yīng)用于自動(dòng)化系統(tǒng)通信的高效數(shù)據(jù)傳輸方式,其基于差分信號(hào)傳輸原理,可以實(shí)現(xiàn)高速、實(shí)時(shí)數(shù)據(jù)傳輸。然而,由于各種原因,CAN總線的信號(hào)通常會(huì)受到干擾,如
2023-09-14 16:48:036911 can總線為什么要用雙絞線?can總線不用雙絞線可以嗎? CAN總線是一種數(shù)據(jù)通信協(xié)議,廣泛用于汽車(chē)、航空、船舶、工業(yè)自動(dòng)化、機(jī)器人等領(lǐng)域。CAN總線采用串行通信方式,主要用于實(shí)現(xiàn)多個(gè)模塊之間的通信
2023-09-14 16:48:057576 CAN控制器根據(jù)兩根線上的電位差來(lái)判斷總線電平。總線電平分為顯性電平和隱性電平,二者必居其一。發(fā)送方通過(guò)使總線電平發(fā)生變化,將消息發(fā)送給接收方。 顯性電平對(duì)應(yīng)邏輯 0,CAN_H 和 CAN
2023-10-27 14:55:282369 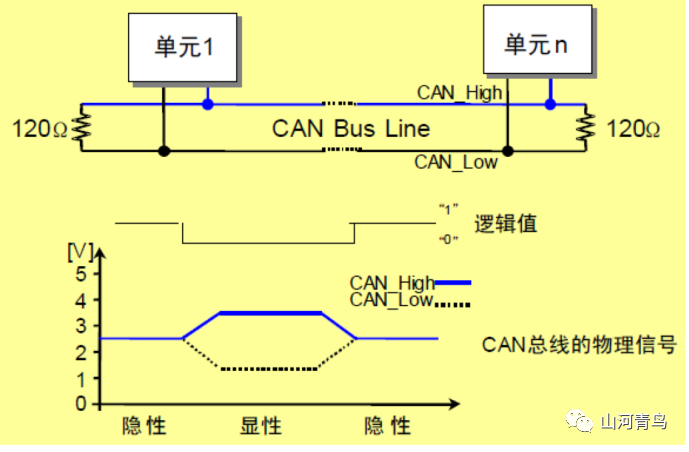
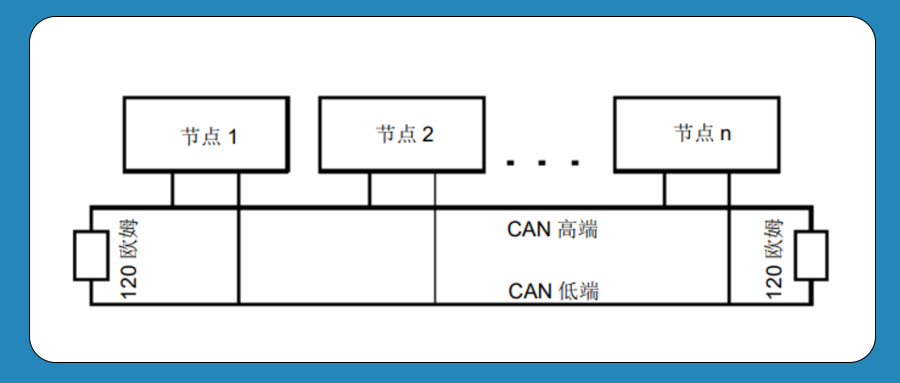
CAN總線 CAN是控制器局域網(wǎng)絡(luò)的簡(jiǎn)稱(chēng),是一種能夠?qū)崿F(xiàn)分布式實(shí)時(shí)控制的串行通信網(wǎng)絡(luò)。CAN總線的功能復(fù)雜且智能。 CAN總線網(wǎng)絡(luò)主要掛在CAN_H和CAN_L,各個(gè)節(jié)點(diǎn)通過(guò)這兩條線實(shí)現(xiàn)信號(hào)的串行差
2023-11-09 18:11:503505 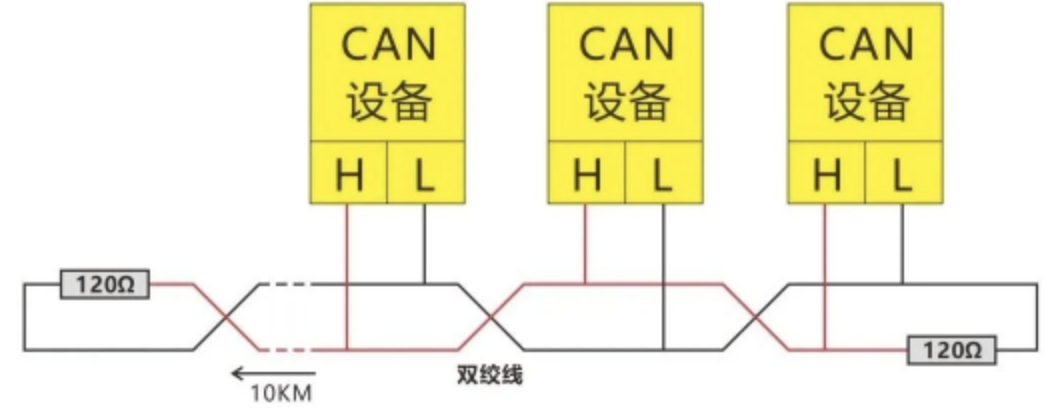
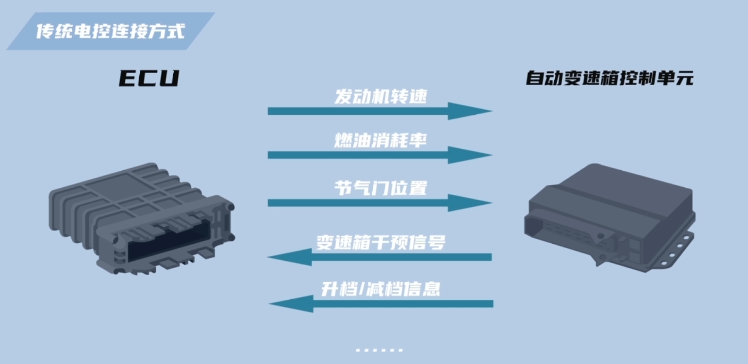
越來(lái)越多的ECU之間的數(shù)據(jù)的相互交換,早期的網(wǎng)絡(luò)結(jié)構(gòu)已經(jīng)不能滿足現(xiàn)有的需要, CAN總線應(yīng)運(yùn)而生。
2023-12-04 17:05:39863 
can總線傳輸距離? CAN總線是一種串行通信協(xié)議,常用于汽車(chē)行業(yè)中的數(shù)據(jù)通信。它被廣泛應(yīng)用于車(chē)載電子系統(tǒng),如發(fā)動(dòng)機(jī)控制單元、制動(dòng)系統(tǒng)、儀表盤(pán)和空調(diào)控制系統(tǒng)等。CAN總線的主要優(yōu)勢(shì)在于其高可靠性
2023-12-07 18:09:405414 CAN總線共模電感是應(yīng)用于CAN總線通信中的一種電子元件,用于解決CAN總線通信中的共模干擾問(wèn)題。本文將詳細(xì)介紹CAN總線共模電感的定義、作用、選型要點(diǎn)以及常見(jiàn)注意事項(xiàng),并且結(jié)合實(shí)際案例進(jìn)行分析
2024-01-05 13:42:347297 之間的信息傳輸。下面將詳細(xì)介紹CAN總線數(shù)據(jù)幀的格式。 CAN總線數(shù)據(jù)幀分為兩種類(lèi)型:標(biāo)準(zhǔn)幀和擴(kuò)展幀。標(biāo)準(zhǔn)幀用于傳輸標(biāo)識(shí)符長(zhǎng)度為11位的數(shù)據(jù),而擴(kuò)展幀用于傳輸標(biāo)識(shí)符長(zhǎng)度為29位的數(shù)據(jù)。 1. 數(shù)據(jù)幀的結(jié)構(gòu) 標(biāo)準(zhǔn)幀和擴(kuò)展幀的數(shù)據(jù)幀結(jié)構(gòu)相似,都包
2024-01-31 13:46:382377 高速CAN總線和低速CAN總線的特性 高速CAN總線和低速CAN總線是兩種常見(jiàn)的CAN總線類(lèi)型。它們?cè)?b class="flag-6" style="color: red">數(shù)據(jù)傳輸速率、最大電纜長(zhǎng)度、適用場(chǎng)景等方面存在一些差異。下面將詳盡、詳實(shí)、細(xì)致地介紹這兩種CAN
2024-01-31 14:09:014360 詳細(xì)
介紹CAN總線的故障波形及其原因和解決方法。 故障波形概述 故障波形是指在
CAN總線通信過(guò)程中,由于各種原因?qū)е碌?b class="flag-6" style="color: red">數(shù)據(jù)傳輸異常。故障波形的類(lèi)型有很多,主要包括以下幾種: 1.1 信號(hào)干擾波形 信號(hào)干擾波形是指在
CAN總線通信過(guò)程中,由于外部電磁干擾或其他原因?qū)е碌?/div>
2024-06-16 10:04:583673 CAN總線(Controller Area Network)是一種用于汽車(chē)和工業(yè)控制系統(tǒng)的通信協(xié)議。它具有高可靠性、實(shí)時(shí)性和靈活性,因此在許多領(lǐng)域得到了廣泛應(yīng)用。本文將詳細(xì)介紹CAN總線的數(shù)據(jù)
2024-06-16 10:18:274907 CAN總線(Controller Area Network)是一種用于汽車(chē)和工業(yè)自動(dòng)化領(lǐng)域的局域網(wǎng)技術(shù),具有實(shí)時(shí)性、可靠性、靈活性和成本效益等優(yōu)點(diǎn)。本文將詳細(xì)介紹CAN總線的特點(diǎn)、原理以及應(yīng)用。 一
2024-06-16 10:19:536354 總線數(shù)據(jù)偶爾會(huì)出現(xiàn)錯(cuò)誤,影響系統(tǒng)的正常運(yùn)行。 一、CAN總線概述 1.1 CAN總線定義 CAN總線是一種基于時(shí)間分割的多主通信協(xié)議,它允許多個(gè)設(shè)備在同一總線上進(jìn)行通信。CAN總線具有高可靠性、實(shí)時(shí)性和靈活性,適用于汽車(chē)、工業(yè)、醫(yī)療等領(lǐng)域。 1.2 CAN總線特點(diǎn) (1)高可靠性:
2024-06-16 10:54:522475 CAN總線是一種基于時(shí)間分割的通信協(xié)議,它允許多個(gè)設(shè)備共享一個(gè)通信介質(zhì)(如雙絞線或光纖)。CAN總線的數(shù)據(jù)傳輸速率可以達(dá)到1 Mbps,適用于短距離通信。CAN總線具有以下特點(diǎn): 多主站結(jié)構(gòu):在CAN總線系統(tǒng)中,任何設(shè)備都可以作為主站發(fā)起通信,而其他設(shè)備則作為從站接收數(shù)據(jù)
2024-07-24 15:06:322425 隨著汽車(chē)電子系統(tǒng)的復(fù)雜性增加,車(chē)輛內(nèi)部通信的需求也在不斷增長(zhǎng)。CAN總線和LIN總線作為兩種主要的車(chē)載通信協(xié)議,各自扮演著重要的角色。 1. 設(shè)計(jì)原理 CAN總線: 數(shù)據(jù)傳輸速率: CAN總線支持
2024-11-12 10:13:386694 CAN總線數(shù)據(jù)傳輸速率 CAN總線(Controller Area Network)是一種用于實(shí)時(shí)應(yīng)用的串行通訊協(xié)議總線,其設(shè)計(jì)目標(biāo)是汽車(chē)內(nèi)部測(cè)量與執(zhí)行部件之間的數(shù)據(jù)通信。CAN總線的數(shù)據(jù)傳輸速率
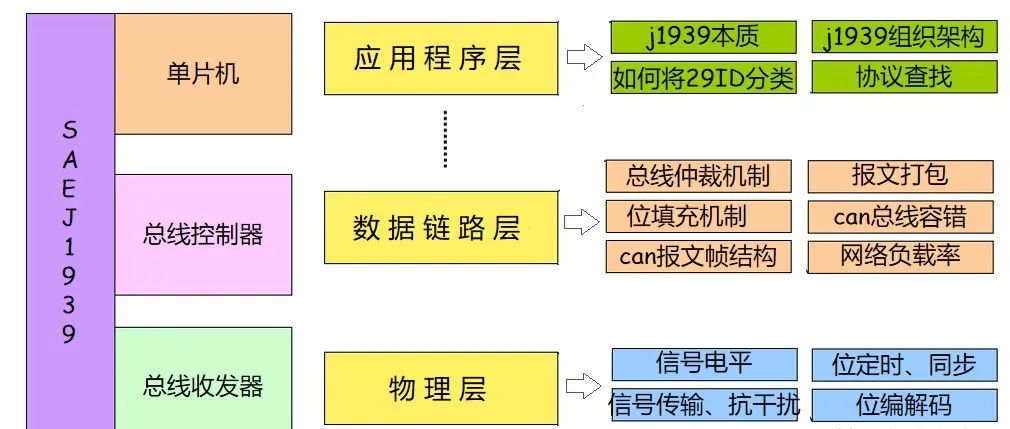
2024-11-21 10:20:202546 于工業(yè)自動(dòng)化、醫(yī)療設(shè)備、船舶系統(tǒng)等領(lǐng)域。 CAN總線通信原理介紹 1. CAN總線概述 CAN總線是一種多主控制的串行通信協(xié)議,它允許多個(gè)設(shè)備共享同一通信線路,實(shí)現(xiàn)數(shù)據(jù)的實(shí)時(shí)傳輸。CAN協(xié)議定義了物理層、數(shù)據(jù)鏈路層和應(yīng)用層,其中數(shù)據(jù)鏈路層是CAN協(xié)議的核心。 2. CAN總線的基本組成 物理
2024-11-21 10:21:513467 使用CAN總線進(jìn)行數(shù)據(jù)采集的方法通常涉及一系列步驟,這些步驟確保了數(shù)據(jù)的準(zhǔn)確采集、處理和存儲(chǔ)。以下是一個(gè)詳細(xì)的方法指南: 一、了解CAN總線系統(tǒng) 首先,需要對(duì)CAN總線系統(tǒng)有一定的了解。CAN總線
2024-12-20 18:18:143725 一種工程機(jī)械領(lǐng)域調(diào)試上的創(chuàng)新產(chǎn)品,可用于Codesys 源程序的無(wú)線下載聯(lián)機(jī)、遠(yuǎn)程調(diào)試、故障診斷、CAN 總線數(shù)據(jù)在線監(jiān)控、透?jìng)魇瞻l(fā)、數(shù)據(jù)采集、數(shù)據(jù)分析、遠(yuǎn)程控制等各種 CAN 總線通訊的場(chǎng)景。
2025-10-17 16:14:230 已全部加載完成
 電子發(fā)燒友App
電子發(fā)燒友App















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論